

- 313.48 KB
- 2022-04-22 13:37:46 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中华人民共和国国家标准卫星通信地球站无线电设备测量方法第三部分分系统组合测量第五节天线跟踪和控制发布实施中华人民共和国电子工业部发布
中华人民共和国国家标准卫星通信地球站无线电设备测量方法第三部分分系统组合测量第五节天线跟踪和控制本标准是卫星通信地球站无线电设备测量方法系列标准之一主题内容与适用范围本标准规定了对地静止卫星通信地球站天线的指向精度跟踪精度指示精度等基本测量方法本标准适用于各种类型的对地静止卫星通信地球站天线跟踪和控制的测量引言通常用指向精度和跟踪精度两个参数来表示卫星通信地球站天线的定位精度见参考资料测量时可选用商品化测量设备如经纬仪接收电平指示装置等但应保证其性能足以完成所述测量而选用的星历表或信号塔相对地球站天线位置值等其精度应高于被测项目精度一个量级由于卫星目标离地球太远用肉眼和一般仪器无法观测因此本标准规定的指向精度和跟踪精度采用相对测量方法测量中所用的光学固定目标应足够远经纬仪轴应尽量靠近天线旋转中心指向精度定义卫星通信地球站天线波束中心轴电轴指向卫星后天线波束中心轴的指向角度读出设备指示值与应有的地球站天线波束中心指向之间的角度差测量方法通常采用星历表法或信号塔法来测量测量设备配置如图所示测量步骤天线控制系统将天线电轴指向目标卫星或信号塔若接收电平指示装置指示的信号信标导频信号或信号源信号为最大此时认为天线波束中心已对准目标在角度读出设备上读出方位角或仰角读数在较短时间内在该时间内卫星飘移引起的误差可以忽略重复上述步骤项得到一组方位角或仰角读数用式求出天线方位指向精度或仰角指向精度中华人民共和国电子工业部批准实施
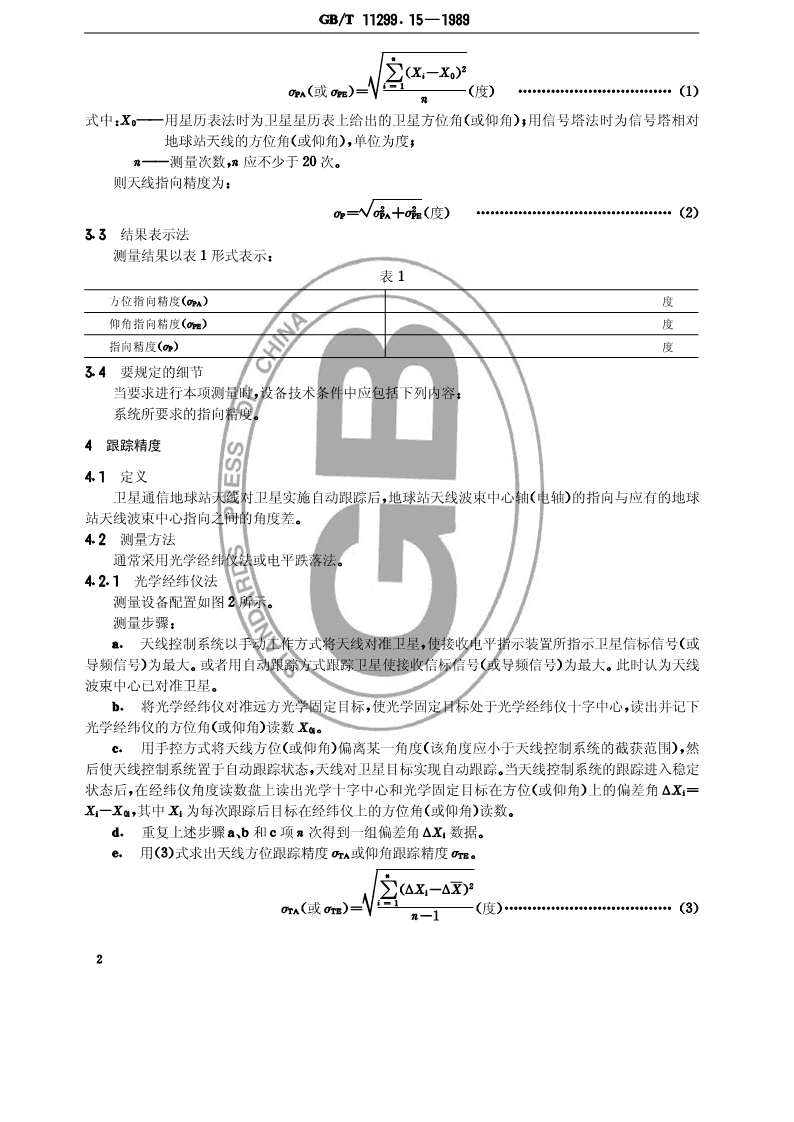
或度式中用星历表法时为卫星星历表上给出的卫星方位角或仰角用信号塔法时为信号塔相对地球站天线的方位角或仰角单位为度测量次数应不少于次则天线指向精度为度结果表示法测量结果以表形式表示表方位指向精度度仰角指向精度度指向精度度要规定的细节当要求进行本项测量时设备技术条件中应包括下列内容系统所要求的指向精度跟踪精度定义卫星通信地球站天线对卫星实施自动跟踪后地球站天线波束中心轴电轴的指向与应有的地球站天线波束中心指向之间的角度差测量方法通常采用光学经纬仪法或电平跌落法光学经纬仪法测量设备配置如图所示测量步骤天线控制系统以手动工作方式将天线对准卫星使接收电平指示装置所指示卫星信标信号或导频信号为最大或者用自动跟踪方式跟踪卫星使接收信标信号或导频信号为最大此时认为天线波束中心已对准卫星将光学经纬仪对准远方光学固定目标使光学固定目标处于光学经纬仪十字中心读出并记下光学经纬仪的方位角或仰角读数用手控方式将天线方位或仰角偏离某一角度该角度应小于天线控制系统的截获范围然后使天线控制系统置于自动跟踪状态天线对卫星目标实现自动跟踪当天线控制系统的跟踪进入稳定状态后在经纬仪角度读数盘上读出光学十字中心和光学固定目标在方位或仰角上的偏差角其中为每次跟踪后目标在经纬仪上的方位角或仰角读数重复上述步骤和项次得到一组偏差角数据用式求出天线方位跟踪精度或仰角跟踪精度或度
式中单位为度测量次数应不少于次则天线跟踪精度为度电平跌落法测量设备配置如图所示测量步骤天线控制系统以手动工作方式将天线对准卫星若接收电平指示装置所指示的卫星信标信号或导频信号电压为最大此时认为天线波束中心已对准卫星用手控方式将天线方位角和或仰角偏离某一角度该角度应在天线控制系统的截获范围内使天线控制系统处于自动跟踪状态当天线跟踪进入稳定状态后测出接收电平指示装置指示的卫星信标信号或导频信号电平跌落值重复上述步骤和项次可得到一组值将电平跌落值归一化然后将电平跌落值按式折算成角误差见参考资料度式中天线实际波束宽度单位为度由式求出天线跟踪精度度式中度测量次数应不少于次注也可用电平跌落平均值的分贝数来表示天线跟踪误差即式中测量次数应不少于次结果表示法条的测量结果以表形式表示表跟踪精度度条的测量结果以文字叙述要规定的细节当要求进行本项测量时设备技术条件中应包括下列内容系统要求的跟踪精度使用方法
指示精度定义卫星通信地球站的天线位置指示装置所指示的天线角位置与天线基准轴机械轴的角位置之间的偏差一般考虑引起指示误差的主要因素中轴系误差和零位标定误差是系统误差其他均为随机误差这些误差可以认为是不相关的因此总的指示误差以方均根值来表示测量方法测量设备配置如图所示测量步骤天线控制装置置于手动工作方式放在天线座上的经纬仪对准地面上远处某一固定目标记下经纬仪的方位角或仰角读数及天线控制指示装置的方位角或仰角读数转动天线某一角度在指示装置上读出方位角或仰角数经纬仪重新对准原固定目标读出其方位角或仰角读数计算及重复上述步骤和项得出两组数据及在转动天线时角度是任意的各次转动的方向也是任意的用式可求出天线方位指示精度或仰角指示精度或度式中测量次数应不少于次结果表示法测量结果以表形式表示表方位指示精度度仰角指示精度度要规定的细节当要求进行本项测量时设备技术条件中应包括下列内容系统要求的指示精度天线运动速度定义单位时间内卫星通信地球站天线方位轴或俯仰轴旋转的角度一般考虑对于具有调速特性的驱动系统将测出最大和最小速度对不具有调速特性的驱动系统将测出驱动范围内的平均速度测量方法最大速度将天线驱动控制装置置于准备状态调整驱动控制电压到电机额定电枢电压并在天线位置指示器上读出天线位置方位角或仰角
将天线驱动控制装置置于电机驱动状态按下秒表记录时间和角度读数重复步骤项多次选取其中的最小运动速度作为最大速度最小速度将天线驱动控制装置置于准备状态调整驱动控制电压到天线能均匀旋转时的电枢电压最小值并在天线位置指示器上读出天线位置方位角或仰角将天线驱动控制装置置于电机驱动状态按下秒表记录时间和角度读数重复步骤项多次选取最大运动速度作为最大速度平均速度将天线驱动控制系统置于准备状态秒表置于秒记下天线起始方位角或仰角值在起动秒表的同时加上驱动电压使天线在方位或俯仰上转动一分钟切断驱动电压使天线停转记下天线方位角或仰角值并计算出天线在一分钟内所转动的方位角或仰角值重复上述步骤和项次得到一组天线在一分钟内转动的方位角或仰角值用式计算天线平均运动速度度秒式中方位角或仰角值度测量次数结果表示法测量结果用文字叙述要规定的细节当要求进行本项测量时设备技术条件中应包括下列内容系统要求的天线运动速度天线运动范围定义天线方位轴和俯仰轴在方位平面和俯仰平面内所能运动的范围测量方法驱动天线到方位的左右限位置并在方位指示器上观测天线运动范围驱动天线到俯仰的上下极限位置并在仰角指示器上观测天线运动范围对方位面上分数个交叠驱动的天线可分别测出各段的运动范围叠加后扣除交叠角即为天线方位运动范围结果表示法测得的结果用文字叙述单位为度要规定的细节当要求进行本项测量时设备技术条件中应包括下列内容系统要求的天线运动范围参考资料国际无线电咨询委员会卫星通信手册固定卫星业务年出版雷达系统分析版雷达精度分析出版
图天线指向精度测量设备配置图采用光学经纬仪法测量跟踪精度的设备配置图利用电平跌落法测量跟踪精度的设备配置
图天线指示精度测量设备配置
附录天线定位精度简析补充件根据参考资料指向精度受下列因素的限制机械轴及电轴未对准引起的误差主要包括轴系误差及电轴和机械轴不匹配误差角度读出误差及该装置的零位标定误差由于天线结构和底座变形风重力和热效应引起的误差伺服系统误差是由风重力伺服噪声和不灵敏区等因素引起的传动误差和伺服控制误差以及由目标运动引起的动态滞后误差跟踪精度受下列因素的限制天线波束电轴的偏移该误差由频率飘移结构变形等引起在单脉冲工作时还有振幅不平衡和相位不一致的电轴飘移由于步距和信号电平测量所引起的误差对步进跟踪方式由于传播变化和卫星信号不稳定引起的误差接收机热噪声伺服驱动系统中由于阵风作用而产生的误差跟踪机构和伺服驱动系统的基本误差齿隙动态滞后等上述诸误差从其统计特性来分一般分随机误差和系统误差两类对于跟踪精度由于目标是对地静止的卫星并且卫星通信地球站天线系统传动链速比很大跟踪误差的统计特性可视为标准偏差趋于很接近零的正态分布随机量在测量时可用多次跟踪时经纬仪读数的平均值来表示应有的地球站天线波束中心指向角附加说明本标准由电子工业部第十四研究所负责起草'
您可能关注的文档
- GBT11264-2012热轧轻轨.pdf
- GBT11277-2012表面活性剂非离子表面活性剂浊点指数(水数)的测定容量法.pdf
- GBT11281-1989控制微电机用齿轮减速器系列.pdf
- GBT11281-2009微电机用齿轮减速器通用技术条件.pdf
- GBT11299.10-1989卫星通信地球站无线电设备测量方法第二部分:分系统测量第十节:高功率放大器.pdf
- GBT11299.11-1989卫星通信地球站无线电设备测量方法第三部分:分系统组合测量第一节:概述.pdf
- GBT11299.12-1989卫星通信地球站无线电设备测量方法第三部分:分系统组合测量第二节:4~6GHz接收系统品质因数(GT)测量.pdf
- GBT11299.13-1989卫星通信地球站无线电设备测量方法第三部分:分系统组合测量第三节:频分多路复用传输的测量.pdf
- GBT11299.14-1989卫星通信地球站无线电设备测量方法第三部分:分系统组合测量第四节:黑白和彩色电视传输测量.pdf
- GBT11299.9-1989卫星通信地球站无线电设备测量方法第二部分:分系统测量第七节:频率调制器第八节:频率解调器.pdf
- GBT1131-1984手用铰刀.pdf
- GBT11310-1989压电陶瓷材料性能测试方法相对自由介电常数温度特性的测试.pdf
- GBT11313.10-2012射频连接器第10部分:SMB系列射频同轴连接器分规范.pdf
- GBT1132-1984直柄机用铰刀.pdf
- GBT11322.1-1997射频电缆第0部分:详细规范设计指南第一篇同轴电缆.pdf
- GBT11322.1-2008射频电缆详细规范设计指南第1篇同轴电缆.pdf
- GBT11322.1-2013射频电缆第0部分:详细规范设计指南第1篇同轴电缆.pdf
- GBT11327.1-1999聚氯乙烯绝缘聚氯乙烯护套低频通信电缆电线第1部分一般试验和测量方法.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明