

- 1.02 MB
- 2022-04-22 11:33:36 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'《电力拖动自动控制系统—运动控制系统》习题2-2调速系统的调速范围是1000~100r/min,要求静差率s=2%,那么系统允许的稳态速降是多少?解:系统允许的稳态速降sn0.02×100min∆n===2.04(rmin)N(1−s)(1−0.02)2-5某龙门刨床工作台采用晶闸管整流器-电动机调速系统。已知直流电动机P=60kW,NU=220V,I=305A,n=1000rmin,主电路总电阻R=0.18Ω,NNNC=0.2V•minr,求:e(1)当电流连续时,在额定负载下的转速降落∆n为多少?N(2)开环系统机械特性连续段在额定转速时的静差率s多少?N(3)额定负载下的转速降落∆n为多少,才能满足D=20,s≤5%的要求。N解:(1)当电流连续时,在额定负载下的转速降落INR305×0.18∆n===274.5(rmin)NC0.2e(2)开环系统机械特性连续段在额定转速时的静差率∆nN274.5s==≈0.215=21.5%Nn+∆n1000+274.5NN(3)额定负载下满足D=20,s≤5%要求的转速降落ns1000×0.05N∆n==≈2.63(rmin)ND(1−s)20×(1−0.05)*2-6有一晶闸管稳压电源,其稳态结构如图所示,已知给定电压U=8.8V,比例调节放大u系数K=2,晶闸管装置放大系数K=15,反馈系数γ=0.7。求:ps(1)输出电压U;d(2)若把反馈线断开,U为何值?开环时的输出电压是闭环时的多少倍?d*(3)若把反馈系数减至γ=0.35,当保持同样的输出电压时,给定电压U应为多少?u解:(1)输出电压KpKs*2×15U=U=×8.8=12(V);du1+KKγ1+2×15×0.7ps*(2)若把反馈线断开,U=KKU=2×15×8.8=264(V);开环时的输出电压是闭环dpsu时的26412=22倍。(3)若把反馈系数减至γ=0.35,当保持同样的输出电压时,给定电压*1+KpKsγ1+2×15×0.35U=U=×12=4.6(V)。udKK2×15ps
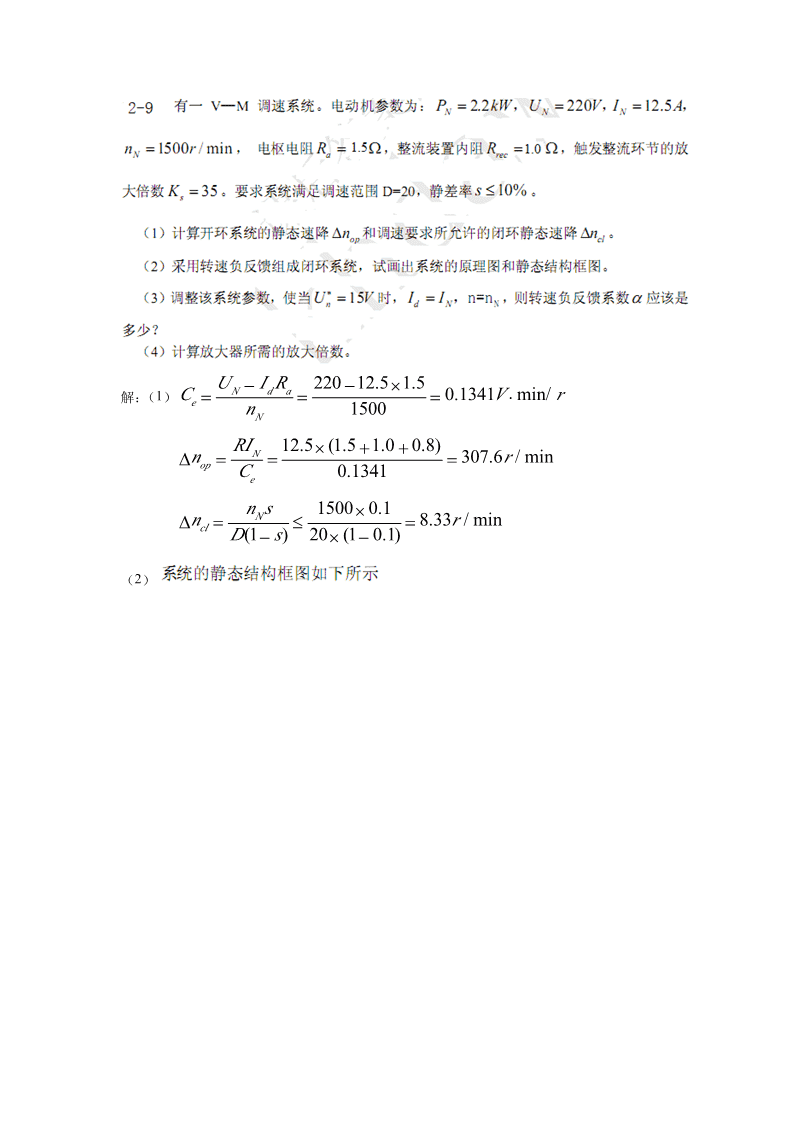
U−IR22012.51.5−×解:(1)NdaC===0.1341V⋅min/ren1500NRI12.5(1.51.00.8)×++N∆n===307.6/minropC0.1341ens15000.1×N∆n=≤=8.33/minrclD(1−s)20(10.1)×−(2)
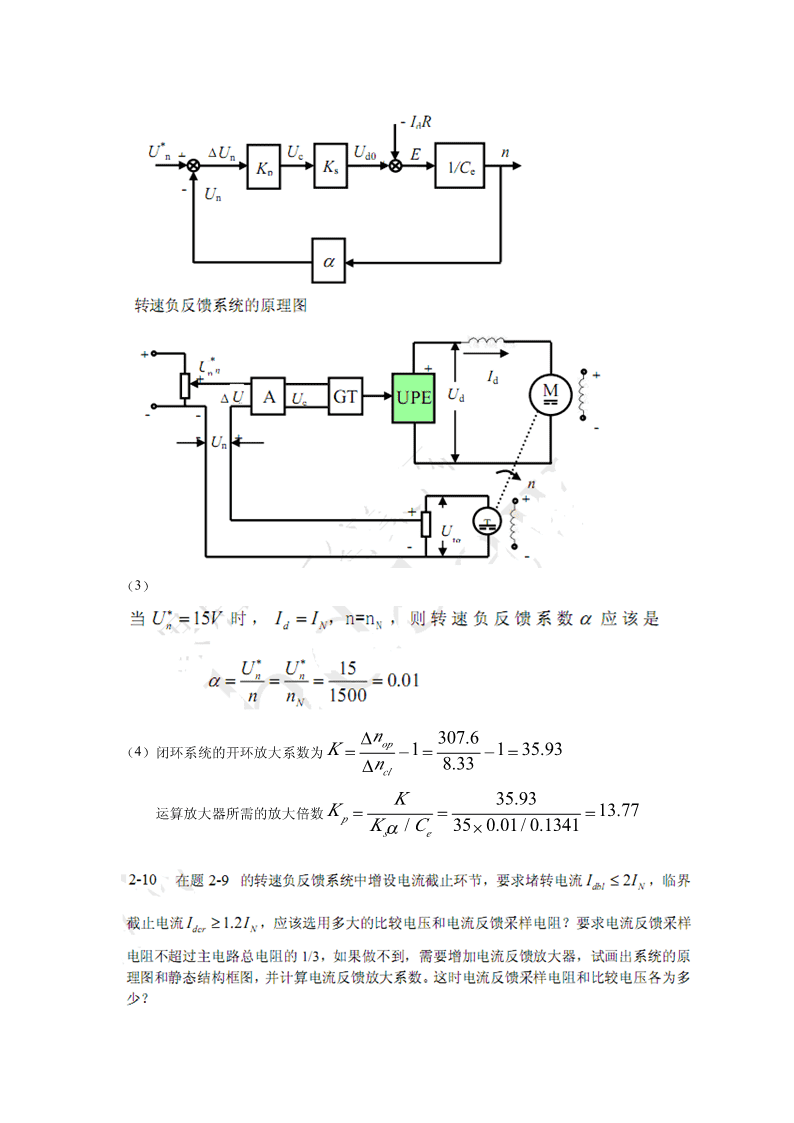
(3)∆nop307.6(4)闭环系统的开环放大系数为K=−=1−=135.93∆n8.33clK35.93运算放大器所需的放大倍数K===13.77pKα/C350.01/0.1341×se
解:R=4.8ΩRs/R=0.31251/3<图见49页解:计算系统中各环节的时间常数L0.05电磁时间常数T===0.02slR1.51.0+2GDR1.6(1.51.00.8)×++机电时间常数T===0.082sm375CC30em3750.1341×××0.1341π晶闸管装置的滞后时间常数为T=0.00167ss为保证系统稳定,应满足的稳定条件:22TT(+T)+T0.082(0.020.00167)0.00167×++mlssK<==53.29TT0.020.00167×ls可以稳定运行,最大开环放大系数是53.292-12有一晶闸管-电动机调速系统,已知:电动机P=2.8kW,U=220V,I=15.6A,NNNn=1500rmin,R=1.5Ω,整流装置内阻R=1Ω,电枢回路电抗器电阻R=0.8Ω,NarecL触发整流环节的放大倍数K=35。求:s(1)系统开环时,试计算调速范围D=30时的静差率s。
(2)当D=30,s=10%时,计算系统允许的稳态速降。*(3)如组成转速负反馈有静差调速系统,要求D=30,s=10%,在U=10V时I=I,ndNn=n,计算转速反馈系数α和放大器放大系数K。Np解:先计算电动机的反电动势系数U−IR220−15.6×1.5NNaC===0.131(V•minr)en1500N系统开环时的额定转速降落I(R+R+R)15.6×(1.5+1+0.8)NarecL∆n==≈393(rmin)NopC0.131e(1)系统开环时,调速范围D=30时的静差率D∆nN30×393s==≈0.887=88.7%;n+D∆n1500+30×393NN(2)当D=30,s=10%时,系统允许的稳态速降nNs1500×0.1∆n==≈5.56(rmin)ND(1−s)30×(1−0.1)(3)如组成转速负反馈有静差调速系统,要求D=30,s=10%,则系统开环放大系数∆nop393K=−1=−1≈69.68;∆n5.56cl*Un10转速反馈系数α==≈0.0067(V•minr)n1500NKCe69.68×0.131放大器放大系数K==≈38.93。pKα35×0.0067s2-13旋转编码器光栅数为1024,倍数系数为4,高频时时钟脉冲频率f=1MHz,旋转编0码器输出的脉冲个数和高频时钟脉冲个数均采用16位计算器,M法和T法测速时间均为0.01s,求转速n=1500r/min和n=150r/min时的测速分辨率和误差率最大值。解:(1)M法测速6060转速n=1500r/min和n=150r/min时的测速分辨率Q==≈1.465ZT1024×4×0.01cnZT1500×4096×0.01c转速n=1500r/min时,M===1024,误差率最大值1606011δ==≈0.00097=0.097%;maxM10241nZT150×4096×0.01c转速n=150r/min时,M===102.4,误差率最大值1606011δ==≈0.0097=0.97%。maxM102.41(2)T法测速660f60×1×100转速n=1500r/min时,M==≈9.8,测速分辨率2Zn4096×150022Zn4096×1500Q==≈171660f−Zn60×1×10−4096×15000
误差率最大值11δ==≈0.103=10.3%。maxM−19.8−12660f60×1×100转速n=150r/min时,M==≈98,测速分辨率2Zn4096×15022Zn4096×150Q==≈1.55660f−Zn60×1×10−4096×1500误差率最大值11δ==≈0.0103=1.03%。maxM−198−123-1双闭环直流调速系统的ASR和ACR均为PI调节器,设系统最大给定电压**U=U=15V,n=1500rmin,I=20A,电流过载倍数为2,电枢回路总电阻nmimNNR=2Ω,K=20,C=0.127V⋅minr,求:se**(1)当系统稳定运行在U=5V,I=10A时,系统的n、U、U、U和U各为多少?ndLniic*(2)当电动机负载过大而堵转时,U和U各为多少?ic解:转速反馈系数*Unm15α===0.01(V⋅minr)n1500N电流反馈系数*Uim15β===0.375(VA)I2×20dm*(1)当系统稳定运行在U=5V,I=10A时,ndL*U=U=5(V)nn*U5nn===500(rmin)α0.01U=βI=0.375×10=3.75(V)idL*U=U=3.75(V)iiUd0Cen+IdLR0.127×500+10×2U====4.175(V)。cKK20ss(2)当电动机负载过大而堵转时,n=0;*U=βI=0.375×2×20=15(V)idmIdmR2×20×2U===4(V)。cK20s3-2在转速、电流双闭环直流调速系统中,两个调节器ASR、ACR均采用PI调节器。已知参数:电动机:P=3.7kW,U=220V,I=20A,n=1000rmin,电枢回路NNNN**总电阻R=1.5Ω;设U=U=U=8V,电枢回路最大电流I=40A,电力电子变nmimcmdm换器的放大倍数K=40。试求:s(1)电流反馈系数β和转速反馈系数α;*(2)当电动机在最高转速发生堵转时的U,U,U和U的值。d0iic
解:(1)电流反馈系数*Uim8β===0.2(VA)I40dm转速反馈系数*Unm8α===0.008(V⋅minr)。n1000N(2)当电动机在最高转速发生堵转时,n=0;U=Cn+IR=0+40×1.5=60(V)d0edm*U=U=βI=0.2×40=8(V)iidmUd060U===1.5(V)。cK40s3-5某反馈系统已校正成典型I型系统。已知时间常数T=0.1s,要求阶跃响应超调量σ≤10%。(1)系统的开环增益。(2)计算过渡过程时间t和上升时间t。sr(3)绘出开环对数幅频特性。如果要求上升时间t<0.25s,则K=?σ=?r解:典型I型系统开环传递函数为KW(s)=s(Ts+1)(1)要求阶跃响应超调量σ≤10%,则要求KT≤0.69,为获得尽量短的上升时间t,选r择KT=0.69;则K=0.690.1=6.9(2)过渡过程时间t=6T=6×0.1=0.6(s);s上升时间t=3.3T=3.3×0.1=0.33(s)。r(3)如果要求上升时间t<0.25s,则选择KT=1;rK=10.1=10,σ=16.3%。K(τs+1)解:PI调节器iiW(s)=τsi10Ki(τs+1)i10K(τs+1)τ开环传递函数iiiW()s=⋅=op2s(0.02s+1)τss(0.02s+1)i对Ⅱ型系统σ≤30%,h=7τ=hT=0.14si
h+1K==204.1222hTKτiK==2.8571i102.8571(0.14s+1)PI调节器W()s=0.14sRiK=R取10kΩR=28.571kΩ取30kΩi0iR0C=R/τ=14µFiii
∆Cmax∆nNT∑n4h=3σ%=2(%)(λ−z)=63.4%n*CnTbm3-10有一转速、电流双闭环直流调速系统,主电路采用三相桥式整流电路。已知电动机参数为:P=500kW,U=750V,I=760A,n=375rmin,电动势系数NNNNC=1.82V⋅minr,电枢回路总电阻R=0.14Ω,允许电流过载倍数λ=1.5,触发整流e环节的放大倍数K=75,电磁时间常数T=0.031s,机电时间常数T=0.112s,电流反slm馈滤波时间常数T=0.002s,转速反馈滤波时间常数T=0.02s。设调节器输入输出电oion**压U=U=U=10V,调节器输入电阻R=40kΩ。nmimnm0设计指标:稳态无静差,电流超调量σ≤5%,空载起动到额定转速时的转速超调量iσ≤10%。电流调节器已按典型I型系统设计,并取参数KT=0.5。n(1)选择转速调节器结构,并计算其参数。(2)计算电流环的截止频率ω和转速环的截止频率ω,并考虑它们是否合理?cicn解:三相桥式整流电路的平均失控时间T=0.0017s,电流环小时间常数之和sT=T+T=0.0037s,要求电流超调量σ≤5%,应取KT=0.5,因此ΣisoiiIΣi−1K≈135.1s。I(1)电流环等效时间常数1K=0.0074s;I转速环小时间常数T=1K+T=0.0074+0.02=0.0274s;ΣnIon电流反馈系数
*Uim10β==≈0.0088(VA)λI1.5×760N转速反馈系数*Unm10α===0.0267(V⋅minr)n375N选择转速调节器结构,其传递函数为K(τs+1)nnW(s)=ASRτsn按跟随和抗扰动性能都较好的原则,取h=5,则ASR的超前时间常数为τ=hT=5×0.0274=0.137snΣn转速环开环增益h+15+1−2K===159.84s,N22222hT2×5×0.0274Σn可得ASR的比例系数为(h+1)βCeTm6×0.0088×1.82×0.112K==≈10.51;n2hαRT2×5×0.0267×0.14×0.0274Σn取调节器输入电阻R=40kΩ,则0R=KR=10.51×40=420.4kΩ,取420kΩnn0τn0.137−7C===3.26×10(F)=0.326µF,取0.33µFn3R420×10n4Ton4×0.02−6C===2×10(F)=2µF,取2µF。on3R40×100−1(2)电流环的截止频率ω=K=135.1s,ciI−1转速环的截止频率ω=Kτ=159.84×0.137≈21.9s;cnNn检验近似条件1)校验晶闸管整流装置传递函数的近似条件11−1=≈196.1(s)>ω,满足近似条件;ci3T3×0.0017s校验忽略反电动势变化对电流环动态影响的条件11−13=3≈50.91(s)<ω,满足近似条件;ciTT0.112×0.031ml校验电流环小时间常数近似条件1111−1=≈180.8(s)>ω,满足近似条件;ci3TT30.0017×0.002soi校验电流环传递函数近似条件1KI1135.1−1=≈63.7(s)>ω,满足近似条件;cn3T30.0037Σi校验转速环小时间常数近似条件1KI1135.1−1=≈27.4(s)>ω,满足近似条件。cn3T30.02on校核转速超调量
⎛∆C⎞∆n⎜max⎟bσ=n⎜C⎟n*⎝b⎠⎛∆C⎞∆nT⎜max⎟NΣn=2(λ−z)⎜⎟*⎝Cb⎠nTm760×0.141.820.0274=2×0.812×(1.5−0)××3750.112≈0.093<10%满足设计要求。
15解:(1)α==0.01V⋅min/r1500*U5nn===500/minrα0.01U=Cn+IR=104Vd0edUd0U==3.47VcKs(2)当电动机突然失磁,电机停转。U=0n**U=U=10ViimU=−10ViI=I=2VddmKs(τ+1)(3)Ws()=2sTs(+1)τ=hT=0.25sh+1−2K==48sN222hT48(0.25s+1)Ws()=2s(0.05s+1)(4)t=8.8T=0.44svm
2RT(I−I)∑ndmdL∆n==93.75/minrbCTem∆Cmax∆n=(%)∆n=76.12/minrmaxbCb5-1一台三相鼠笼异步电动机的铭牌数据为:额定电压U=380V,额定转速Nn=960rmin,额定频率f=50Hz,定子绕组为Y联接。由实验测得定子电阻NNR=0.35Ω,定子漏感L=0.006H,定子绕组产生气隙主磁通的等效电感L=0.26H,slsm转子电阻R′=0.5Ω,转子漏感L′=0.007H,转子参数已折算到定子侧,忽略铁芯损耗。rlr(1)画出异步电动机T形等效电路和简化电路。(2)额定运行时的转差率s,定子额定电流I和额定电磁转矩。N1N(3)定子电压和频率均为额定值时,理想空载时的励磁电流I。0(4)定子电压和频率均为额定值时,临界转差率s和临界转矩T,画出异步电动机的机mem械特性。解:(1)异步电动机T形等效电路异步电动机简化电路60f60×50N(2)由于额定转速n=960rmin,同步转速n===1000(rmin),N1n3pn−n1000−960额定运行时的转差率s=1==0.04Nn10001由异步电动机T形等效电路,R+jωLLR0.0060.35s1lslssC=1+=1+−j=1+−j≈1.023−j0.004≈1.0231jωLL2πfL0.26100π×0.261mmNm可得转子相电流幅值
UsI′=r2⎛Rr′⎞22⎜R+C⎟+ω(L+CL′)⎜s1s⎟1ls1lr⎝N⎠220=2⎛0.5⎞2()2⎜0.35+1.023×⎟+(100π)×0.006+1.023×0.007⎝0.04⎠220=172.5939+17.0953=15.9735(A)气隙磁通在定子每相绕组中的感应电动势2⎛Rr′⎞22E=I′⎜⎟+ωL′=15.9735×156.25+4.8361≈202.7352(V)gr⎜s⎟1lr⎝N⎠额定运行时的励磁电流幅值Eg202.7352I==≈2.482(A)0ωL100π×0.261m由异步电动机简化电路,额定运行时的定子额定电流幅值U220sI==1N22⎛R2′⎞22⎛0.5⎞22⎜Rs+⎟+ω1(Lls+Llr′)⎜0.35+⎟+(100π)×(0.006+0.007)⎝s⎠⎝0.04⎠220=165.1225+16.6796=16.3164(A)额定电磁转矩=Pm=3np′2Rr′3×320.5TI=×15.9735×≈91.37(N⋅m)(依据T形等效电路)erωωs100π0.04m1N或Pm3np2Rr′3×320.5T==I=×16.3164×≈95.33(N⋅m)(依据简化等效电路)e1Nωωs100π0.04m1N(3)定子电压和频率均为额定值时,理想空载时的励磁电流U220sI===2.633(A)02ω2()20.352+(100π)2×(0.006+0.26)2R+L+Ls1lsm(4)定子电压和频率均为额定值时,临界转差率R′0.5rs===0.122m2ω220.352+(100π)2×(0.006+0.007)2R+(L+L′)s1lslr临界转矩223npUs3×3×220T==emω⎡2ω22⎤200×π×0.35+0.352+(100π)2×(0.006+0.007)22R+R+(L+L′)[]1⎢⎣ss1lslr⎥⎦=155.83(N⋅m)
异步电动机的机械特性:Sn0n1Sm10TTeme125-2异步电动机参数如习题5-1所示,画出调压调速在U和U时的机械特性,计算临NN23界转差率s和临界转矩T,分析气隙磁通的变化,在额定电流下的电磁转矩,分析在恒转mem矩负载和风机类负载两种情况下,调压调速的稳定运行范围。解:定子相电压改变,临界转差率不变,即R′0.5rs===0.122m2ω220.352+(100π)2×(0.006+0.007)2R+(L+L′)s1lslr111当调压至U时,临界转矩T=T=×155.83=38.96(N⋅min),Nememax244244当调压至U时,临界转矩T=T=×155.83=69.26(N⋅min)。Nememax399U气隙磁通:Φ≈s随定子电压的降低而减小。m4.44fNk1sNs5-6异步电动机参数如习题5-1所示,输出频率f等于额定频率fN时,输出电压U等于额定电压UN,考虑低频补偿,若频率f=0,输出电压U=10%UN。(1)求出基频以下电压频率特性曲线U=f(f)的表达式,并画出特性曲线。(2)当f=5Hz和f=2Hz时,比较补偿与不补偿的机械特性曲线,两种情况下的临界转矩Temax。解:(1)UN=220(A)斜率
U−0.1U220−22k=NN==3.96,f−050−0N考虑低频补偿时,电压频率特性曲线U=3.96f+22;220不补偿时,电压频率特性曲线U=f=4.4f50(2)当f=5Hz时A、不补偿时,输出电压U=4.4f=22(V),临界转矩3nU22ps3×3×22Tem==ω⎡2ω22⎤20×π×0.35+0.352+(10π)2×(0.006+0.007)22R+R+(L+L′)[]1⎢⎣ss1lslr⎥⎦=78.084(N⋅m)B、补偿时,输出电压U=3.96f+22=41.8(V)3nU22ps3×3×41.8Tem==ω⎡2ω22⎤20×π×0.35+0.352+(10π)2×(0.006+0.007)22R+R+(L+L′)[]1⎢⎣ss1lslr⎥⎦=281.883(N⋅m)当f=2Hz时A、不补偿时,输出电压U=4.4f=8.8(V),临界转矩3nU22ps3×3×8.8Tem==ω⎡2ω22⎤8×π×0.35+0.352+(4π)2×(0.006+0.007)22R+R+(L+L′)[]1⎢⎣ss1lslr⎥⎦=37.666(N⋅m)B、补偿时,输出电压U=3.96f+22=29.92(V)3nU22ps3×3×29.92Tem==ω⎡2ω22⎤8×π×0.35+0.352+(4π)2×(0.006+0.007)22R+R+(L+L′)[]1⎢⎣ss1lslr⎥⎦=435.419(N⋅m)5-8两电平PWM逆变器主回路,采用双极性调制时,用“1“表示上桥臂开通,”0“表示上桥臂关断,共有几种开关状态,写出其开关函数。根据开关状态写出其电压矢量表达式,画出空间电压矢量图。解:
5-11采用电压空间矢量PWM调制方法,若直流电压u恒定,如何协调输出电压与输出频d率的关系。解:在一个周期内,6个有效工作矢量顺序作用一次,定子磁链矢量是一个封闭的正六边形。22πudψ(k)=∆ψ(k)=u(k)∆t=u∆t=ssd333ω1正六边形定子磁链的大小与直流侧电压成正比,而与电源角频率成反比。在基频以下调速时,应保持正六边形定子磁链的最大值恒定。若直流侧电压恒定,则ω越小时,∆t越大,势必1导致ψ(k)增加。因此,要保持正六边形定子磁链不变,必须使uω为常数,这意味着sd1在变频的同时必须调节直流电压,造成了控制的复杂性。有效的方法是插入零矢量,当零矢量作用时,定子磁链矢量的增量∆ψ(k)=0,表明s定子磁链矢量停留不动。有效工作矢量作用时间∆t<∆t,1零矢量作用时间∆t=∆t−∆t,01当ω∆t=ω(∆t+∆t)=π3时,定子磁链矢量的增量为1110正六边形定子磁链的最大值在直流电压不变的条件下,要保持ψ(k)恒定,只要使∆t为常数即可。输出频率越低,∆ts1越大,零矢量作用时间∆t也越大,定子磁链矢量轨迹停留的时间越长。由此可知,零矢量0
的插入有效地解决了定子磁链矢量幅值与旋转速度的矛盾。6-1按磁动势等效、功率相等原则,三相坐标系变换到两相静止坐标系的变换矩阵为⎡11⎤1−−2⎢22⎥C32=⎢⎥333⎢0−⎥⎢⎣22⎥⎦2π2π现有三相正弦对称电流i=Isin(ωt)、i=Isin(ωt−)、i=Isin(ωt+),求AmBmCm33变换后两相静止坐标系中的电流i和i,分析两相电流的基本特征与三相电流的关系。sαsβ⎡⎤⎡11⎤⎢Imsin(ωt)⎥⎡i⎤2⎢1−−⎥⎢2π⎥3⎡Isin(ωt)⎤sα22m解:⎢⎥=⎢⎥⎢Imsin(ωt−)⎥=⎢⎥;⎣isβ⎦3⎢03−3⎥⎢3⎥2⎣−Imcos(ωt)⎦⎢⎣22⎥⎦⎢Isin(ωt+2π)⎥m⎢⎣3⎥⎦6-2两相静止坐标系到两相旋转坐标系的变换矩阵为⎡cosϕsinϕ⎤C=2s2r⎢⎥⎣−sinϕcosϕ⎦将习题6-1中的静止坐标系中的电流i和i变换到两相旋转坐标系中的电流i和i,坐sαsβsdsqdϕ标系旋转速度为=ω。分析当ω=ω时,电流i和i的基本特征,电流矢量幅值11sdsqdt22i=i+i与三相电流幅值I的关系,其中ω是三相电源角频率。ω>ω和ω<ω时,ssdsqm11i和i的表现形式。sdsq⎡isd⎤⎡cosϕsinϕ⎤3⎡Imsin(ωt)⎤3⎡Imsin(ωt−ϕ)⎤解:⎢⎥=⎢⎥⎢⎥=⎢⎥⎣isq⎦⎣−sinϕcosϕ⎦2⎣−Imcos(ωt)⎦2⎣−Imcos(ωt−ϕ)⎦dϕ由坐标系旋转速度为=ω,则ϕ=ωt+ϕ(ϕ为初始角位置)1100dt(1)当ω=ω时,ϕ=ωt=ωt+ϕ,则1103i=−Isinϕ,sdm023i=−Icosϕ,sqm02223i=i+i=I;ssdsqm2(2)当ω>ω和ω<ω时,设ω=ω−ω,ωt−ϕ=−ωt−ϕ,则11s1s0⎡isd⎤3⎡Imsin(ωt−ϕ)⎤3⎡−Imsin(ωst+ϕ0)⎤⎢⎥=⎢⎥=⎢⎥。⎣isq⎦2⎣−Imcos(ωt−ϕ)⎦2⎣−Imcos(ωst+ϕ0)⎦6-3按转子磁链定向同步旋转坐标系中状态方程为
坐标系的旋转角速度为Lmω=ω+i1stTψrr假定电流闭环控制性能足够好,电流闭环控制的等效传递函数为惯性环节dism11*=−i+ismsmdtTTiidist11*=−i+iststdtTTii**T为等效惯性时间常数。画出电流闭环控制后系统的动态结构图,输入为i和i,输出为ismstω和ψ,讨论系统稳定性。r解:电流闭环控制后系统的动态结构图如下:*ism1ismLmψrTs+1Ts+1ir*ist1istLmTenpωnpTis+1Lr_JsTL转子磁链环节为稳定的惯性环节;转速通道存在积分环节,系统不稳定,必须加转速外环使之稳定。6-4鼠笼异步电动机铭牌数据为:额定功率P=3kW,额定电压U=380V,额定电流NNI=6.9A,额定转速n=1400rmin,额定频率f=50Hz,定子绕组Y联接。由实NNN验测得定子电阻R=1.85Ω,转子电阻R=2.658Ω,定子电感L=0.294H,转子自感srsL=0.2898H,定、转子互感L=0.2838H,转子参数已折合到定子侧,系统的转动惯rm2量J=0.1284kg⋅m,电动机稳定运行在额定工作状态,试求转子磁链ψ和按转子磁链定r向的定子电流两个分量i和i。smst解:额定转速n=1400rmin,额定频率f=50Hz,则电动机极对数n=2,额定转NNp2πnN速ω==146.6(rads);ω=nω=293.2(rads);mpm60设三相正弦对称电流i=Isin(2πft)=9.758sin(100πt)、AmN2π2πi=Isin(2πft−)=9.758sin(100πt−)、BmN33
2π2πi=Isin(2πft+)=9.758sin(100πt+),CmN33⎡⎤⎡11⎤⎢Imsin(2πfNt)⎥⎡i⎤2⎢1−−⎥⎢2π⎥⎡11.951sin(100πt)⎤sα22⎢⎥=⎢⎥⎢Imsin(2πfNt−)⎥=⎢⎥⎣isβ⎦3⎢03−3⎥⎢3⎥⎣−11.951cos(100πt)⎦⎢⎣22⎥⎦⎢Isin(2πft+2π)⎥mN⎢⎣3⎥⎦L0.2898r转子电磁时间常数T===0.109(s),rR2.658r电动机稳定运行在额定工作状态时ψ=Li−ωTψrαmsαrrβ,得ψ=Li+ωTψrβmsβrrαLi−ωTLimsαrmsβψ=rα221+ωTr0.2838×11.951×sin(100πt)−293.2×0.109×0.2838×(−11.951)×cos(100πt)=221+293.2×0.109=0.0033×sin(100πt)+0.1060×cos(100πt)Li+ωTLimsβrmsαψ=rβ221+ωTr0.2838×(−11.951)×cos(100πt)+293.2×0.109×0.2838×11.951×sin(100πt)=221+293.2×0.109=−0.0033×cos(100πt)+0.1060×sin(100πt)22222ψ=0.0033×sin(100πt)+0.0006996×sin(100πt)×cos(100πt)+0.1060×cos(100πt)rα22222ψ=0.0033×cos(100πt)−0.0006996×sin(100πt)×cos(100πt)+0.1060×sin(100πt)rβ2222ψ=ψ+ψ=0.0033+0.1060≈0.1061rrαrβψrβ−0.0033×cos(100πt)+0.1060×sin(100πt)sinϕ==ψ0.1061r≈−0.0311×cos(100πt)+0.9991×sin(100πt)ψ0.0033×sin(100πt)+0.1060×cos(100πt)rαcosϕ==ψ0.1061r≈0.0311×sin(100πt)+0.9991×cos(100πt)⎡ism⎤⎡cosϕsinϕ⎤⎡isα⎤⎡cosϕsinϕ⎤⎡sin(100πt)⎤⎢⎥=⎢⎥⎢⎥=11.951×⎢⎥⎢⎥⎣ist⎦⎣−sinϕcosϕ⎦⎣isβ⎦⎣−sinϕcosϕ⎦⎣−cos(100πt)⎦⎡0.0311⎤⎡0.3717⎤=11.951×⎢⎥=⎢⎥(A)⎣−0.9991⎦⎣−11.9402⎦6-5根据习题6-3得到电流闭环控制后的动态结构图,电流闭环控制等效惯性时间常数T=0.001s,设计矢量控制系统转速调节器ASR和磁链调节器AψR,其中,ASR按典型iII型系统设计,AψR按典型I型系统设计,调节器的限幅按2倍过电流计算,电动机参数同习题6-4。
解:(1)AψR按典型I型系统设计**ψrism1ismLmψrΑΨRTs+1Ts+1_ir磁链调节器AψR采用PI调节器,其传递函数可写成K(τs+1)ψψW=AΨRτsψ磁链环开环传递函数为Kψ(τψs+1)LmW=opψτs(Ts+1)(Ts+1)ψirL0.2898r其中转子电磁时间常数T===0.109(s),电流闭环控制等效惯性时间常数rR2.658rT=0.001s,选择τ=T=0.109s,便校正成典型I型系统,因此iψrKψLmKΨKψLmW==,其中:K=;opψΨτs(Ts+1)s(Ts+1)τψiiψ在一般情况下,希望超调量σ≤5%,可选择ξ=0.707,KT=0.5,则iΨi1−1K=ω==500(s),Ψcψ2TiKΨτψKΨTr500×0.109K====192.04,ψLL0.2838mm调节器的限幅按2倍过电流计算,磁链调节器AψR输出限幅值*i=2i=2×0.3717=0.7434(A)。smmaxsmN(2)ASR按典型II型系统设计ψTrL_**i1istLTenωωstmpASRnp_Tis+1LrJs转速调节器ASR采用PI调节器,其传递函数可写成K(τs+1)nnW=ASRτsn转速环开环传递函数为2Kn(τns+1)1npLmnpKnnpLmψr(τns+1)W=ψ=opnr2τsTs+1LJsτLJs(Ts+1)nirnri2KnLψnpmr令转速环开环增益K=,则NτLJnrK(τs+1)W=Nnopn2s(Ts+1)i按跟随和抗扰性能都较好的原则,取中频宽h=5,则τ=hT=5×0.001=0.005(s)ni
h+15+1−2−2K==s=120000sN22222hT2×5×0.001iKτLJ120000×0.005×0.2898×0.1284NnrK==≈185.365n22nLψ2×0.2838×0.1061pmr−1−1转速环截止频率ω=Kτ=120000×0.005s=600scnNn调节器的限幅按2倍过电流计算,转速调节器ASR输出限幅值*i=2i=2×11.9402=23.8804(A)stmaxstN'
您可能关注的文档
- 弹性力学简明教程 第三版 (徐芝纶 著) 高等教育出版社 课后答案
- 弹性力学简明教程-第四版课后习题详解
- 图像工程 第一版 (章毓晋 著) 清华大学出版社 课后答案
- 当代大学德语4 (聂黎曦 梁敏 著) 外语教学与研究出版社 课后答案
- 《电机学》 中国电力出版社(胡虔生 胡敏强)版1
- 土地管理学总论 第二版 (陆红生 著) 中国农业出版社 课后答案
- 《电力拖动自动控制系统》陈伯时(第三版)机械工业出版社习题答案
- 土力学 第二版 (东南大学 著) 中国建筑工业出版社 课后答案
- 当代世界经济与政治 第三版 (李景治 著) 人民大学出版社 课后答案
- 当代中国与世界认识方法习题答案
- 《电路基础与仿真实验》(童建华)课后习题答案 人民邮电出版社
- 土力学 第二版 (刘成宇 著) 中国铁道出版社 课后答案
- 《电路与模拟电子技术》(陈士英)课后答案
- 土力学__河海大学出版社_课后习题答案
- 低频电子线路 (刘树林 著) 机械工业出版社 课后答案
- 土力学地基基础 第四版 (陈希哲 著) 清华大学出版社 3—5章 课后答案
- 《电路与模拟电子技术》第二版(殷瑞祥主编) 课后习题答案 高等教育出版社
- 工程制图基础习题集 哈工大 (李利群 著) 黑龙江教育出版社 课后答案
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明