

- 611.05 KB
- 2023-01-01 08:31:56 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
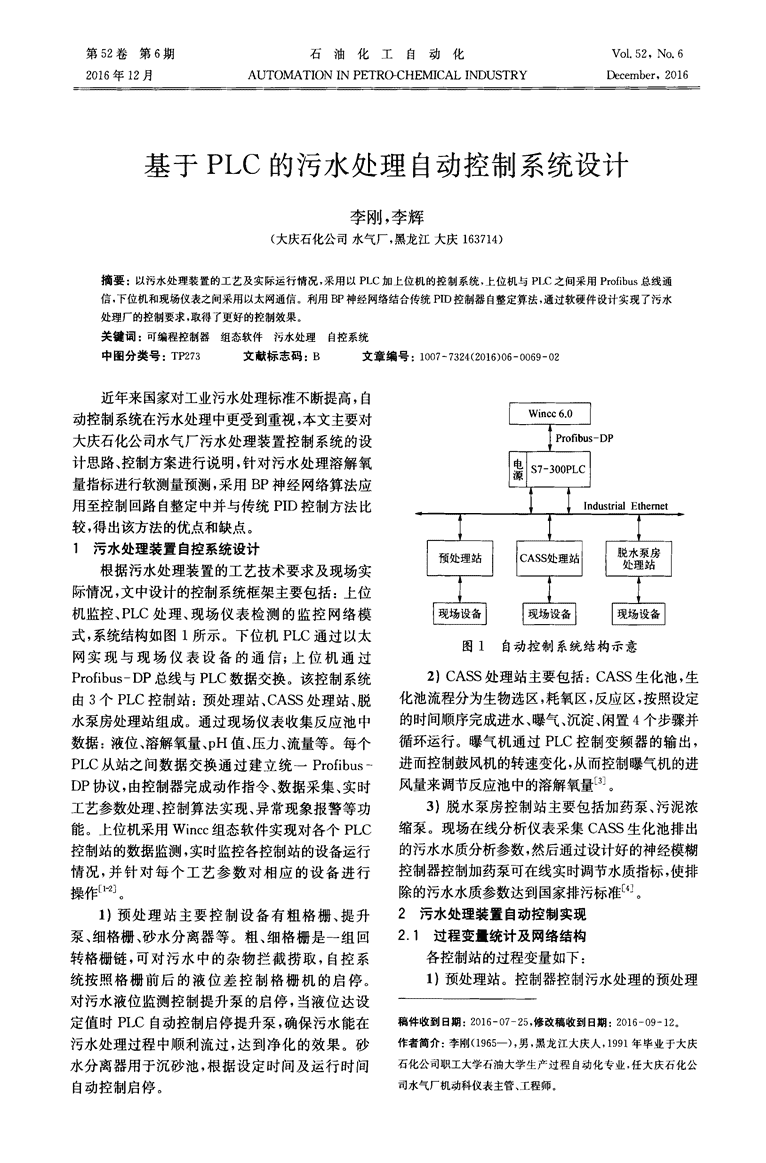
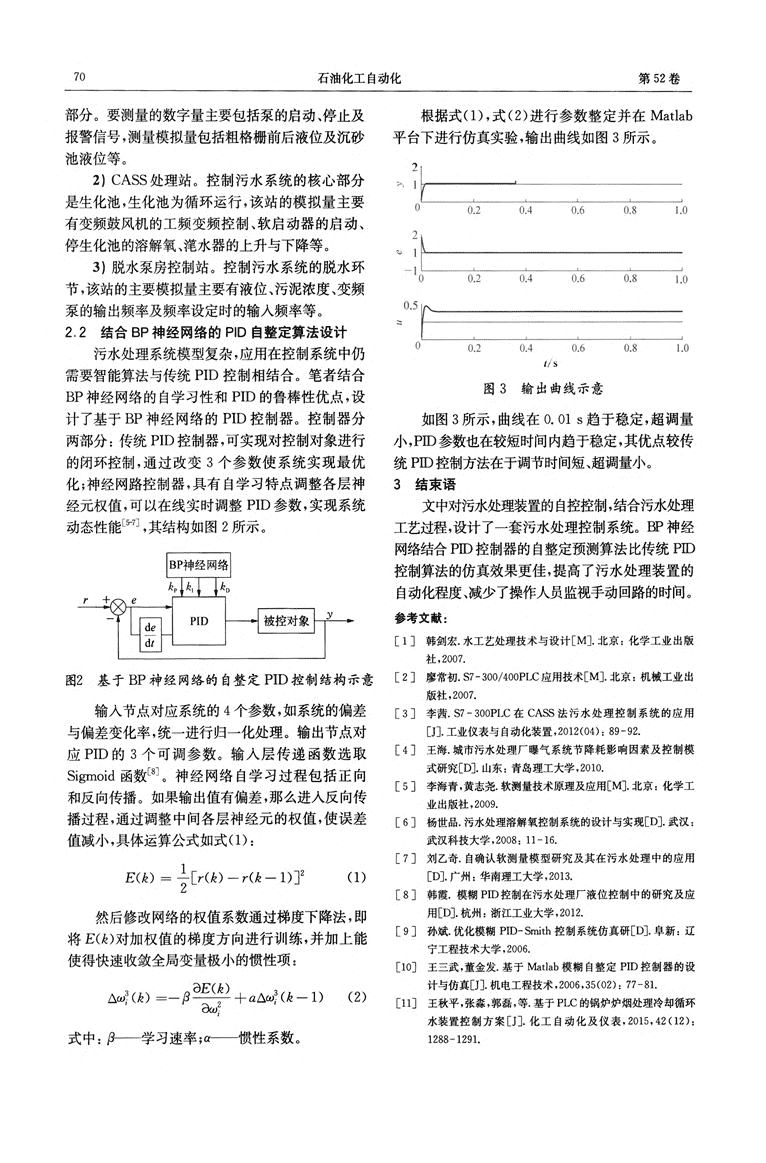
第52卷第6期2016年12月石油化工自动化AUTOMATl0NINPETRO—CHEMICALINDUSTRYV01.52,No.6December。2016基于PLC的污水处理自动控制系统设计李刚,李辉(大庆石化公司水气厂,黑龙江大庆163714)摘要:以污水处理装置的工艺及实际运行情况,采用以PLc加上位机的控制系统,上位机与PIc之间采用Profibus总线通信,下位机和现场仪表之间采用以太网通信。利用BP神经网络结合传统PID控制器自整定算法,通过软硬件设计实现了污水处理厂的控制要求,取得了更好的控制效果。关键词:可编程控制器组态软件污水处理自控系统中图分类号:TP273文献标志码:B文章编号:1007—7324(2016)06一0069一02近年来国家对工业污水处理标准不断提高,自动控制系统在污水处理中更受到重视,本文主要对大庆石化公司水气厂污水处理装置控制系统的设计思路、控制方案进行说明,针对污水处理溶解氧量指标进行软测量预测,采用BP神经网络算法应用至控制回路自整定中并与传统PID控制方法比较,得出该方法的优点和缺点。1污水处理装置自控系统设计根据污水处理装置的工艺技术要求及现场实际情况,文中设计的控制系统框架主要包括:上位机监控、PLC处理、现场仪表检测的监控网络模式,系统结构如图1所示。下位机PLC通过以太网实现与现场仪表设备的通信;上位机通过Profibus—DP总线与PLC数据交换。该控制系统由3个PLC控制站:预处理站、CASS处理站、脱水泵房处理站组成。通过现场仪表收集反应池中数据:液位、溶解氧量、pH值、压力、流量等。每个PLC从站之间数据交换通过建立统一Profibus~DP协议,由控制器完成动作指令、数据采集、实时工艺参数处理、控制算法实现、异常现象报警等功能。上位机采用Wincc组态软件实现对各个PLC控制站的数据监测,实时监控各控制站的设备运行情况,并针对每个工艺参数对相应的设备进行操作‘1引。1)预处理站主要控制设备有粗格栅、提升泵、细格栅、砂水分离器等。粗、细格栅是一组回转格栅链,可对污水中的杂物拦截捞取,自控系统按照格栅前后的液位差控制格栅机的启停。对污水液位监测控制提升泵的启停,当液位达设定值时PI£自动控制启停提升泵,确保污水能在污水处理过程中顺利流过,达到净化的效果。砂水分离器用于沉砂池,根据设定时间及运行时间自动控制启停。图1自动控制系统结构示意2)CASS处理站主要包括:CASS生化池,生化池流程分为生物选区,耗氧区,反应区,按照设定的时间顺序完成进水、曝气、沉淀、闲置4个步骤并循环运行。曝气机通过PLC控制变频器的输出,进而控制鼓风机的转速变化,从而控制曝气机的进风量来调节反应池中的溶解氧量L3J。3)脱水泵房控制站主要包括加药泵、污泥浓缩泵。现场在线分析仪表采集CASS生化池排出的污水水质分析参数,然后通过设计好的神经模糊控制器控制加药泵可在线实时调节水质指标,使排除的污水水质参数达到国家排污标准[4]。2污水处理装置自动控制实现2.1过程变量统计及网络结构各控制站的过程变量如下:1)预处理站。控制器控制污水处理的预处理稿件收到日期:2016一07—25,修改稿收到日期:2016一09—12。作者简介:李刚(1965一),男,黑龙江大庆人,1991年毕业于大庆石化公司职工大学石油大学生产过程自动化专业,任大庆石化公司水气厂机动科仪表主管、工程师。\n70石油化工自动化第52卷部分。要测量的数字量主要包括泵的启动、停止及报警信号,测量模拟量包括粗格栅前后液位及沉砂池液位等。2)CASS处理站。控制污水系统的核心部分是生化池,生化池为循环运行,该站的模拟量主要有变频鼓风机的工频变频控制、软启动器的启动、停生化池的溶解氧、滗水器的上升与下降等。3)脱水泵房控制站。控制污水系统的脱水环节,该站的主要模拟量主要有液位、污泥浓度、变频泵的输出频率及频率设定时的输入频率等。2.2结合BP神经网络的PID自整定算法设计污水处理系统模型复杂,应用在控制系统中仍需要智能算法与传统PID控制相结合。笔者结合BP神经网络的自学习性和PID的鲁棒性优点,设计了基于BP神经网络的PID控制器。控制器分两部分:传统PID控制器,可实现对控制对象进行的闭环控制,通过改变3个参数使系统实现最优化;神经网路控制器,具有自学习特点调整各层神经元权值,可以在线实时调整PID参数,实现系统动态性能旧J,其结构如图2所示。图2基于BP神经网络的自整定PID控制结构示意输入节点对应系统的4个参数,如系统的偏差与偏差变化率,统一进行归一化处理。输出节点对应PID的3个可调参数。输入层传递函数选取Sigmoid函数[8]。神经网络自学习过程包括正向和反向传播。如果输出值有偏差,那么进入反向传播过程,通过调整中间各层神经元的权值,使误差值减小,具体运算公式如式(1):E(志)一÷[r(志)一r(走一1)]2(1)Z然后修改网络的权值系数通过梯度下降法,即将E(忌)对加权值的梯度方向进行训练,并加上能使得快速收敛全局变量极小的惯性项:△耐(志)一一卢掣+口△胡(愚一1)(2)砌i式中:卜学习速率;口——惯性系数。根据式(1),式(2)进行参数整定并在Matlab平台下进行仿真实验,输出曲线如图3所示。如图3所示,曲线在o.01s趋于稳定,超调量小,PⅢ参数也在较短时间内趋于稳定,其优点较传统PD控制方法在于调节时间短、超调量小。3结束语文中对污水处理装置的自控控制,结合污水处理工艺过程,设计了一套污水处理控制系统。BP神经网络结合PD控制器的自整定预测算法比传统Pm控制算法的仿真效果更佳,提高了污水处理装置的自动化程度、减少了操作人员监视手动回路的时间。参考文献:[1]韩剑宏.水工艺处理技术与设计[M].北京:化学工业出版社,2007.[2]廖常初.s7—300/400PLC应用技术[M].北京:机械工业出版社,2007.[3]李茜.s7—300PLc在cASS法污水处理控制系统的应用[J].工业仪表与自动化装置,2012(04):89—92.[4]王海.城市污水处理厂曝气系统节降耗影响因素及控制模式研究[D].山东:青岛理工大学,2010.[5]李海青,黄志尧.软测量技术原理及应用[M].北京:化学工业出版社,2009.[6]杨世品.污水处理溶解氧控制系统的设计与实现[D].武汉:武汉科技大学,2008:11—16.[7]刘乙奇.自确认软测量模型研究及其在污水处理中的应用[D].广州:华南理工大学,2013.[8]韩霞.模糊PID控制在污水处理厂液位控制中的研究及应用[D].杭州:浙江工业大学,2012.[9]孙斌.优化模糊PID—srTlith控制系统仿真研[D].阜新:辽宁工程技术大学,2006.[10]王三武,董金发.基于Matlab模糊自整定PID控制器的设计与仿真[J].机电工程技术,2006,35(02):77—81.[11]王秋平,张淼,郭磊,等.基于PLc的锅炉炉烟处理冷却循环水装置控制方案[J].化工自动化及仪表,2015,42(12):】288一】291.O2●●15O一)∞,?