

- 240.00 KB
- 2023-01-02 08:30:03 发布


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
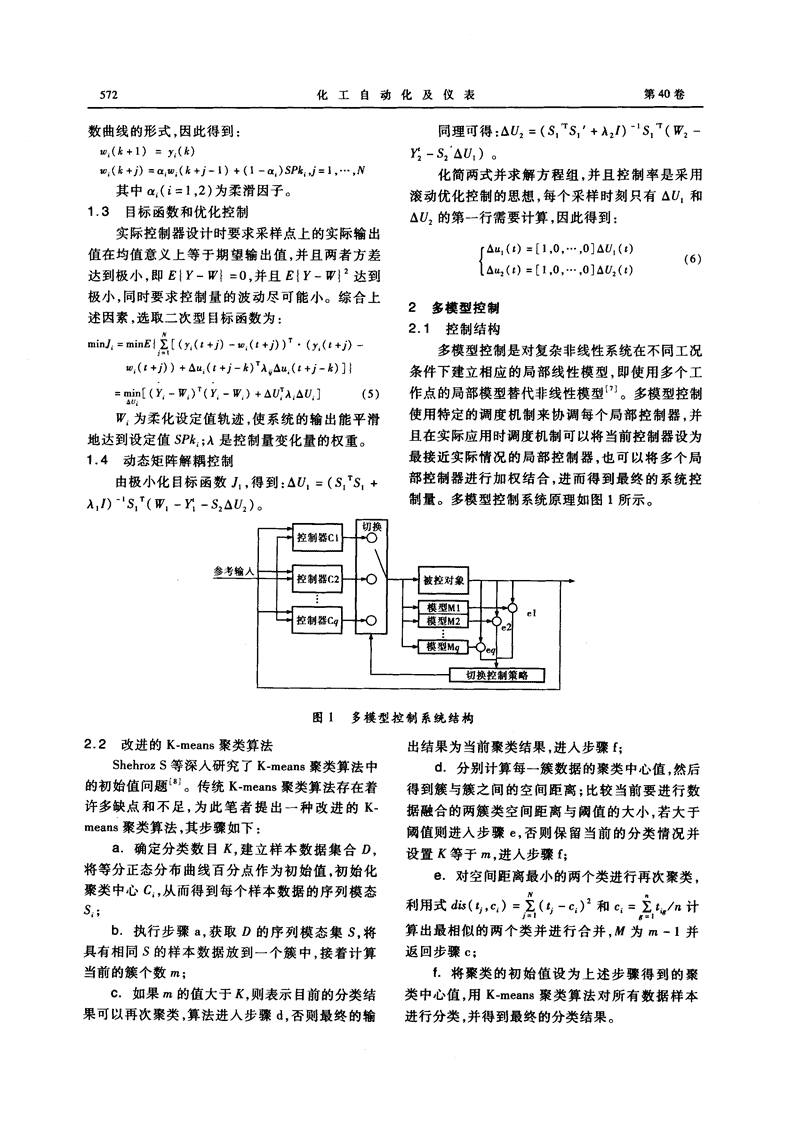
第5期薛美盛等.污水处理过程的非线性预测控制研究571污水处理过程的非线性预测控制研究薛美盛刘飞(中国科学技术大学自动化系,合肥230026)摘要针对多模型预测控制方案中K-means聚类算法存在的不足,提出一种改进的K.means算法。将该算法应用于活性污泥1号模型(ASMI),对雨天厌氧池末端氨氮和硝氮浓度进行控制,取得了比较满意的效果。关键词污水处理过程非线性系统多模型预测控制改进的K.means聚类算法中图分类号TH86文献标识码B文章编号1000.3932(2013)05-0571-04污水处理过程具有非线性的特点¨J,国际水质协会(IWA)提出的污水处理Benchmark基准可以进行很好地模拟,该基准采用二指数沉淀速率模型作为二沉池模型,活性污泥l号模型(ASMI)作为生化反应池模型。目前污水处理控制领域的研究有:FerrerJ等深入研究曝气过程中溶解氧浓度的模糊控制,并开发了溶解氧模糊逻辑控制系统¨‘;SyuMJ和ChenBC研究污水处理过程的加药自适应控制,并采用BP神经网络模型进行模型辨识"。;JoseR和GerardG采用T.S模型对污水处理过程的参数进行辨识并且建立系统的非线性模型”1;刘超彬等采用模糊神经网络控制方法对污水处理过程中溶解氧浓度进行控制¨1。笔者对基于活性污泥模型的污水处理过程及其控制策略进行研究。多模型控制基于聚类分析所划定的子空间,即对整个系统空间进行划分,因此聚类质量将会影响后期的建模以及控制精度。文献[6,7]通过K—means聚类算法对入水氨氮浓度进行聚类分簇并设计相应局部控制器,该算法简单易行、收敛速度快。但它存在如下缺点:随机选取簇平均值算法会影响最终的聚类质量,因为可能会使某些簇样本数据集合为空,从而无法进行簇的更新;聚类结果取决于簇类中心个数K值的选取并且将K值的确定留给了用户,如果用户不能对系统特性充分了解,将不能得到合理的K值。笔者在课题组前期研究工作的基础上,针对传统K.means聚类算法存在的不足,提出~种改进的K—means聚类算法,可以有效解决上述问题,并以改进的聚类算法为基础设计氨氮及硝氮浓度多模型预测控制器。1动态矩阵控制算法1.1预测模型选取厌氧池硝氮浓度和氨氮浓度为被控量,好氧池内循环流量和氧传递系数为控制量。采用系统阶跃响应序列作为对象模型得到:Yl(t)=Sl(q一1)AuI(t—k)+S2(q一1)Au2(t—k)+占.(£)/△(1)Y2(t)=S’l(q一1)Aul(t一%)+S’2(q一。)Au2(t一☆)+占2(t)/A(2)其中,占,(f)、s:(t)是均值为零的白噪声;系统的延时为k;系统模型的长度为N;A=1一q“是差分算子;S。(q‘1)等是系统的单位阶跃响应模型。限于篇幅此处仅给出部分结论,文献[7]有比较详细的数学推导。输出预测分解的矩阵形式:Y,=y:+S,·AU,+Sl·AU2(3)Y2;E+S’l·AUI+S’2·AU2(4)1.2柔化设定值轨迹系统在k时刻的设定值为SPk,如果直接设定期望输出为SPk,则此时得到k时刻的控制量可能很大,从而使闭环输出产生比较大的超调量,对系统产生较大的影响。因此在预测控制方法中,经常使用设定值柔化技术,使系统的输出沿一条预先设定的曲线并逐渐达到系统设定值。将未来k+,时刻系统的柔化设定值记为埘。(南+_『),实际使用中通常把未来的设定值轨迹规划成一阶指收稿日期:2012-12-06(修改稿)基金项目:国家水体污染控制与治理科技重大专项课题(2009ZX07210-003)\n572化工自动化及仪表第40卷数曲线的形式,因此得到:埘.(k+1)=Yi(☆)留‘(七+j)=吐i埘i(k+歹一1)+(1一n。)SPkf,J=l,⋯,Ⅳ其中a。(i:1,2)为柔滑因子。1.3目标函数和优化控制实际控制器设计时要求采样点上的实际输出值在均值意义上等于期望输出值,并且两者方差达到极小,即E{l,一形}=0,并且E{y一形}2达到极小,同时要求控制量的波动尽可能小。综合上述因素,选取二次型目标函数为:ⅣminJf=minE{∑[(Y。(t+j)一"。(t+j))1·(Y.(t+,)一t£,.(t+,))+Au。(t+J一矗)。AiAu.(t+j一后)]}=mini(Yi—Wi)7(Yi—W。)+△u:A;AU.](5)40i肜i为柔化设定值轨迹,使系统的输出能平滑地达到设定值SPk;;A是控制量变化量的权重。1.4动态矩阵解耦控制由极小化目标函数_,。,得到:△U。=(S,rS.+A,,)一1_s。1(W。一y:一s:△U2)。同理可得:AU:=(S.”S。’+A:,)~S。1(职一E—S2AU。)。化简两式并求解方程组,并且控制率是采用滚动优化控制的思想,每个采样时刻只有AU。和AU,的第一行需要计算,因此得到:』△ul‘‘)=[1’o,..’,o]AUI(¨(6)【tXu2(1)=[1,0,⋯,o]△£,2(£)2多模型控制2.1控制结构多模型控制是对复杂非线性系统在不同工况条件下建立相应的局部线性模型,即使用多个工作点的局部模型替代菲线性模型"3。多模型控制使用特定的调度机制来协调每个局部控制器,并且在实际应用时调度机制可以将当前控制器设为最接近实际情况的局部控制器,也可以将多个局部控制器进行加权结合,进而得到最终的系统控制量。多模型控制系统原理如图1所示。图1多模型控常j系统结构2.2改进的K.means聚类算法ShehrozS等深入研究了K·means聚类算法中的初始值问题¨。。传统K.means聚类算法存在着许多缺点和不足,为此笔者提出一种改进的K.means聚类算法,其步骤如下:a.确定分类数目K,建立样本数据集合D,将等分正态分布曲线百分点作为初始值,初始化聚类中心Ci,从而得到每个样本数据的序列模态Si;b.执行步骤a,获取D的序列模态集S,将具有相同.s的样本数据放到一个簇中,接着计算当前的簇个数m;c.如果m的值大于K,则表示目前的分类结果可以再次聚类,算法进入步骤d,否则最终的输出结果为当前聚类结果,进入步骤f;ct.分别计算每一簇数据的聚类中心值,然后得到簇与簇之间的空间距离;比较当前要进行数据融合的两簇类空间距离与阈值的大小,若大于阈值则进入步骤e,否则保留当前的分类情况并设置K等于m,进入步骤f;e.对空间距离最小的两个类进行再次聚类,Ⅳ“利用式d/s(tj,c;)=互(‘一ci)2和ci=∑.t培/n计算出最相似的两个类并进行合并,M为m一1并返回步骤C;f。将聚类的初始值设为上述步骤得到的聚类中心值,用K—means聚类算法对所有数据样本进行分类,并得到最终的分类结果。\n第5期薛美盛等.污水处理过程的非线性预测控制研究5733仿真结果图2是雨天入水氨氮浓度随时间的变化曲线,可以看出,活性污泥模型在雨天时入水氨氮浓度剧烈波动。选择在下雨天气下对厌氧池末端氨氮浓度以及硝氮浓度进行控制,可以充分检验多模型预测控制器的控制性能。?E●Z●攀魁烂腰骣*一<图2雨天入水氨氮浓度使用基于改进的K—means聚类算法的动态多模型预测控制器对系统进行控制。首先根据入水氨氮浓度数据得到8个聚类中心C={9.61,20.80,26.78,29.46,32.92,35.25,39.47,48.17},分别设计相应的子控制器,根据当前入水氨氮浓度选择子控制器计算当前控制量,从而实现闭环控制。采用该控制器得到的系统控制量输出如图3所示。时间/天图3多模型动态矩阵控制输出由图3可以看到,厌氧池出水硝氮浓度比设定值仅高出39·N/m3,氨氮浓度比设定值高出19·N/m5。说明基于改进的K-means聚类算法的多模型预测控制器对厌氧池氨氮浓度和硝氮浓度控制取得了很好的效果。4结束语活性污泥法污水生物处理过程是一个强烈的非线性系统,尤其是在雨天入水流量和氨氮浓度剧烈变化的情况下,系统模型带来较强的扰动。笔者针对传统K.means聚类算法存在的问题进行研究并做出适当的改进,设计多模型动态矩阵控制器。最后将该方法用于缺氧池末端硝氮浓度和氨氮浓度控制,取得了良好的效果。参考文献[1]DochainD,PerrierM.ContmlDesignforNonlinearWastewaterTreatmentProcesses[J].WaterScience&Technology,1988,28(11/12):283~293.[2]FerretJ,RodrigoMA,SecoA,eta1.EnergySavingintheAerationProcessbyFuzzyLogicControl[J].WaterScienceandTechnology,1998,38(3):209—217.[3]SyuMJ,ChenBC.Back—propagationNeuralNetworkAdaptiveControlofaContinuousWastewaterTreat-mentProcess[J].IndustrialEngineeringChemistryResearch,1998,37(12):3625—3630.[4]JoseR,GerardG.ModelingofaWaterTreatmentPlant:AMulti·ModelRepresentation[J].Environ-metrics,1994,(12):599—611.[5]刘超彬,乔俊飞,张芳芳.污水处理过程中溶解氧的模糊神经网络控制[J].山东大学学报,2005,35(3):83—87.[6]薛美盛,杨彦波,刘飞.动态污水处理过程的多模型动态矩阵控制[J].环境工程学报,2013,7(3):957—962.[7]杨彦波.活性污泥法污水处理过程先进控制研究[D].合肥:中国科学技术大学,2011.[8]ShehrozS,Khan,AmirA.ClusterCenterInitializationAlgorithmforK—meansClustering[J].PatternRecog—nitionLetter,2004,25:1293~1302.TheStudyofNon—linearPredictiveControlforWastewaterTreatmentProcess(ContinuedonPage581)o.z.暑,毯蛏]爵普.o.z.攀越爱壕]爵\n第5期宋春宁等.递归T.S模糊模型的神经网络581量维数的级数增长带来的维数扩张,表现出优良的动态特性。5结束语笔者提出的递归T—S模糊模型对非线性函数辨识实验,由仿真结果和前节证明可知该网络可以逼近复杂的非线性函数;减少模糊规则的数量,同时系统的网络结构得到简化。对于不了解内部机理的系统,可根据输入一输出数据对象进行准确的辨识。神经网络和递归T.S模糊模型的有机结合不仅增强了其学习能力和数据泛化能力,而且自适应能力和收敛速度也得到提高。[1]参考文献卢志刚,吴士昌,于灵慧.非线性自适应逆控制及其应用[M].北京:国防工业出版社,2004.JangJ-SR.SunC-TT.Neuro·FuzzyModelandControl[J].ProceedingsoftheIEEE,1955,83(3):378-406.FahdAA,AbdennourAB.Neuro·FuzzyControlofaSteamBoiler.TurbineUnit[C].ProcessingoftheIEEEInternationalConferenceonControlApplication.USA:IEEE.1999:1050—1055.[4]师黎,陈铁军.智能控制[M].北京:清华大学出版社,2008:125—133.[5]李国勇.智能预测控制及其MATLAB实现[M].第2版.北京:电子工业出版社。2010:250—254.[6]TakagiT,SugenoM.FuzzyIdentificationofSystemsandItsApplicationtoModelingandControl[J].IEEETransactionsonSystems,ManandCybernetics,1985,15(1):116—132.[7]WangCC。LinNS.RuleExtractionforFuzzyLogicControlandDecisionSystem[J].IEEETransactionsonComputers,1991。40(12):1320—1336.[8]张凯,钱锋,刘漫丹.模糊神经网络技术综述[J].信息与控制,2005,32(5):431—435.[9]李香娜.基于T·s模糊模型的酸碱中和过程的系统辨识[J].华北科技学院学报,2010,7(3):56~60.[10]SugenoM,KangGT.StructureIdentificationofFuzzyModel[J].FuzzySetsandSystems,1988,28(1):15—33.NeuralNetworkBasedonRecurrentT-SFuzzyModelSONGChun-ning,LIUShao—dong(College矿ElectricalEngineering,GuangxiUniversity,Nanning530004,China)AbstractThedynamicrecursiveelementswereaddedtothegeneralT--Sfuzzyneuralnetworktoproposeare--currentT—Sfuzzyneuralnetwork.Inthesystemidentification,theunsupervisedclusteringalgorithmanddy—namicback—propagationalgorithmwereappliedtotheparametertrainingofthisrecurrentneuralnetworkandtheapproximationofthefuzzyneuralnetworkwasproved.ComparingtheidentificationresultsofthetwofuzzyneuralnetworksshowsthattherecurrentT··Sfuzzyneuralnetworkcanperformwellinnonlinearsystemidentifi·-cation.Keywordsrecurrentneuralnetwork,T-Sfuzzymodel,nonlinearsystemidentificationmodeling,fuzzybasefunction,unsupervisedclusteringalgorithm,dynamicback—propagationalgorithm(ContinuedfromPage573)XUEMei-sheng,LIUFei(Department矿Automation,UniversityofScienceandTechnologyofChina,Hefei230026,China)AbstractConsideringtheK—meansclusteringalgorithm’Sinsufficiencyinmulti—modelpredictivecontrolscheme,animprovedK·meansclusteringalgorithmwaspresented,andapplyingittoactivatedsludgemodel(ASMl)tocontrolammoniaandnitrateconcentrationin’anaerobictankendatrainingdayscanachievesatis-factorycontrolgoals.Keywordswastewatertreatmentprocess,non—linearsystem,multi-modelpredictivecontrol,improvedK—meansclusteringalgorithm