

- 347.62 KB
- 2023-01-02 08:30:06 发布


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
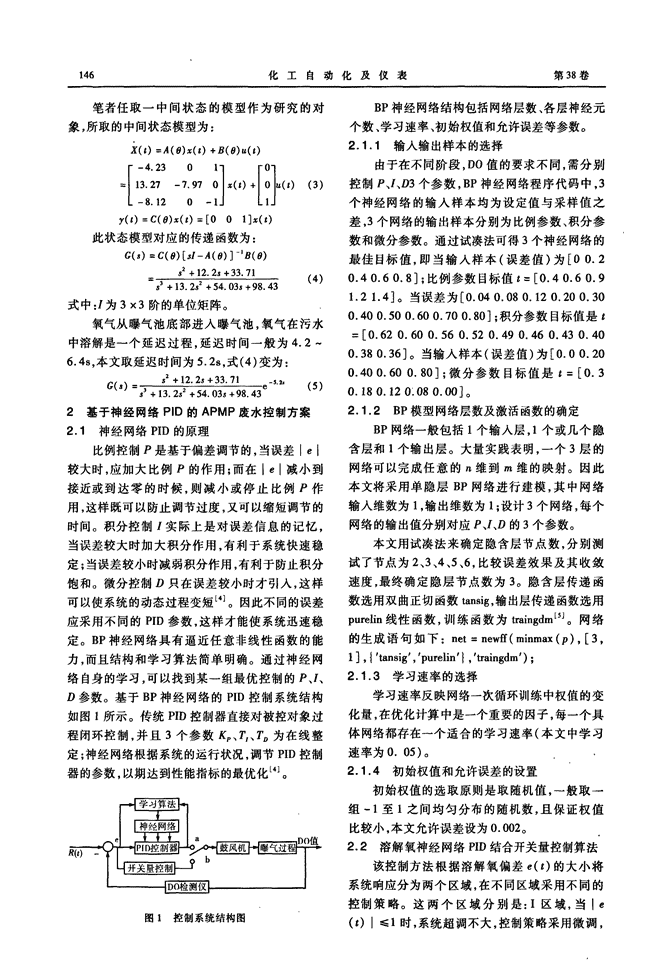
第2期王忠峰等.神经网络PID在APMP废水处理中的应用145神经网络PID在APMP废水处理中的应用王忠峰1,汤伟1”,黄俊梅1,王孟效1’2(1.陕西科技大学电气与信息工程学院,西安710021;2.陕西西微测控工程有限公司,陕西成阳712081)’摘要:针对APMP废水处理过程存在严重非线性、大时滞等控制难点,提出了基于神经网络PID的APMP废水处理控制方案。关键词:神经网络;PID;溶解氧;APMP,中图分类号:TP273文献标识码:B文章编号:1000—3932(2011)02-0145-04最近几十年里,国内外提出了许多废水处理控制方案,例如:利用仿人智能、开关控制、PID控制及神经网络控制等,其中神经网络控制方案的提出并成功应用,具有重要的意义。为了消除由溶解氧(DO)浓度的改变带来的损失,使用开关量和神经网络PID控制方法。采用开关量控制的目的是进行粗调迅速消除大误差;神经网络PID进行细调提高控制精度,粗略和精确控制之间的转换是通过一种软开关实现的⋯。1曝气过程数学模型的建立1.1活性污泥系统模型7笔者在冯裕钊等提出模型的基础上n】,得出了活性污泥系统的状态方程:、d_矿.sxⅡ。“一孚¨跳孥:》。一事:(1)百2霄-一妒z(1’垫:丛生笔乒盟矿阮+二,d一=一譬.一fE.+Ⅱt,,yNH。1。3一式中IX。(t)——微生物的浓度;菇:(t)——底物浓度;茹,(t)——混合液中氧的浓度;Q——流入量;H。——微生物的最大比增长速率;卜反应器体积;kd——内在的迟滞系数;C——二沉池浓度因子;Qw——污质的流量;,,——联系有机物与需氧量的因子;正。——消耗因子;Ys。——观察到的生长系数;卜设定的溶解氧冲量系数;u——打氧量。1.2模型的转换选取曝气量H为控制量,溶解氧浓度x,(t)作为被控量,并将流入污水中的有机物浓度作为扰动,则式(1)可以表示为:X(I)=A(一)X(I)+占(一)“(I)’,,(I)=C(口)z(I)(2)A(口);O6一号oO一占曰(p)=[001]7c(一)=[O01]1.3不确定参数有界系统模型在污水处理过程中,由于进水流量Q、排出污泥量Q曹、进水微生物的浓度Si、好氧菌的可观测产率yN。在污水处理过程中是随每天的废水进水量、废水水质等其它方面的因素而发生变化的,同时又由于其进水量,废水水质是在一定范围波动的,因而又属于有界的。由以上分析可知,状态方程式(2)中的参数是在一定的范围内变动的,系统属于不确定参数有界系统,可以确定参数的变化如下:‰一k—CFQ.E[/3。。J9I。。]告E[岛。岛.~一号E[如。卢3Jat]丛生笔乒盟E[阢。/3,_Ⅱ].,lKH一。’4⋯。。“。取冲量系数恒为1,则各参数的上下界值为:[卢l。h卢。。。]=[一2.9495—5.949】[J92“区。。]=[9.063418.1296][岛。卢3~]=[一10.05’6.05][反。尻一]=[一4.9364—9.9436]收稿日期:2010-09-19(修改稿)基金项目:国家自然基金(30972322);陕西省自然基金(07JKl92)出k一识一孚等』丛”杀坐\n146化工自动化及仪表第38卷笔者任取一中间状态的模型作为研究的对象,所取的中间状态模型为:;[量?};3—7:)97—01]菇ct,+[。o]uct,c3812o1,;l13.27—7.1菇(I)+llu(t)()L一.一JLJ此状态模型对应的传递函数为:G(s)=c(口)[sl—A(口)]一1曰(p):r』上当堕塑L(4)2丁五r矛了西五i而【4,式中:,为3×3阶的单位矩阵。氧气从曝气池底部进入曝气池,氧气在污水中溶解是一个延迟过程,延迟时间一般为4.2—6.4s,本文取延迟时间为5.2s,式(4)变为:G(s)=万袅鼍篇等而e-5t‘(5)2基于神经网络PID的APMP废水控制方案2.1神经网络PID的原理比例控制P是基于偏差调节的,当误差Ie较大时,应加大比例P的作用;而在lel减小到接近或到达零的时候,则减小或停止比例P作用,这样既可以防止调节过度,又可以缩短调节的时间。积分控制J实际上是对误差信息的记忆,当误差较大时加大积分作用,有利于系统快速稳定;当误差较小时减弱积分作用,有利于防止积分饱和。微分控制D只在误差较小时才引入,这样可以使系统的动态过程变短M1。因此不同的误差应采用不同的PID参数,这样才能使系统迅速稳定。BP神经网络具有逼近任意非线性函数的能力,而且结构和学习算法简单明确。通过神经网络自身的学习,可以找到某一组最优控制的P、,、D参数。基于BP神经网络的PID控制系统结构如图1所示。传统PID控制器直接对被控对象过程闭环控制,并且3个参数酢、t、%为在线整定;神经网络根据系统的运行状况,调节PID控制器的参数,以期达到性能指标的最优化H】。图1控制系统结构图BP神经网络结构包括网络层数、各层神经元个数、学习速率、初始权值和允许误差等参数。2.1.1输入输出样本的选择由于在不同阶段,DO值的要求不同,需分别控制P、,、D3个参数,BP神经网络程序代码中,3个神经网络的输入样本均为设定值与采样值之差,3个网络的输出样本分别为比例参数、积分参数和微分参数。通过试凑法可得3个神经网络的最佳目标值,即当输入样本(误差值)为[00.20.40.60.8];比例参数目标值t=[0.40.60.91.21.4]。当误差为[0.040.080.120.200.300.400.500.600.700.80];积分参数目标值是t=[0.620.600.560.520.490.460.430.400.380.36]。当输入样本(误差值)为[0.00.200.400.600.80];微分参数目标值是t=[0.30.180.120:080.00]。2.1.2BP模型网络层数及激活函数的确定BP网络一般包括1个输入层,1个或几个隐含层和1个输出层。大量实践表明,一个3层的网络可以完成任意的n维到m维的映射。因此本文将采用单隐层BP网络进行建模,其中网络输入维数为1,输出维数为1;设计3个网络,每个网络的输出值分别对应P、I、D的3个参数。本文用试凑法来确定隐含层节点数,分别测试了节点为2、3、4、5、6,比较误差效果及其收敛速度,最终确定隐层节点数为3。隐含层传递函数选用双曲正切函数tansig,输出层传递函数选用purelin线性函数,训练函数为traingdm【5J。网络的生成语句如下:net=newff(minmax(P),[3,1],{’tansig’,’purelin’},’traingdm’)o2.1.3学习速率的选择学习速率反映网络一次循环训练中权值的变化量,在优化计算中是一个重要的因子,每一个具体网络都存在一个适合的学习速率(本文中学习速率为0.05)。2.1.4初始权值和允许误差的设置初始权值的选取原则是取随机值,一般取一组一1至1之间均匀分布的随机数,且保证权值比较小,本文允许误差设为0.002。2.2溶解氧神经网络PID结合开关量控制算法该控制方法根据溶解氧偏差e(t)的大小将系统响应分为两个区域,在不同区域采用不同的控制策略。这两个区域分别是:I区域,当Ie(‘)I≤1时,系统超调不大,控制策略采用微调,\n镕2№t$№##&目镕Pu)8^PMP《mⅡⅨ十∞&m即采用神经网络PID控制策略(开关由b端切向a端);ⅡE域,当le(£)l>1时,系统超谓过太.控制策略采用粗两控制策略.目采用开荒盛控制器进行粗诃,使系统迅速向毪态南向靠近("关由q端切向h端)。3仿真用MAT[.AB对神经网络PID方案控制下的曝气池内的溶解氧控制同路进行r仿真研究.“时滞过程为例:。w=可冀弓篙格而e’“在MATIA8的M.File中编写仿真语句.以比倒为例P=(002040608];t=『0406091214];net=newff(mlnmax(P),[3.I],j’tansig’,7pum,fin。},’train酣m’);1瞪弋『]4哐卜—_疆二_一⋯酐■;npulWeights=nPtIWjlI2inpmbias=neIb{1}layerWeights=netLW;2.1}laverbm=ne[b|21nettminParamshow=50:neItrainParamepochs=6000:He[tminPammgoal;0002;[net,tr]mln(nm.p.t);genslm(net,一】)//把MAT]AB指夸空问中语句转化为Simulink模块反复训练可知当权值和阐性分别是input—WeighLs:[105000105000—105000],in—putbi∞=[一g4000—420000];[ayerWelghts=f—O2946—06243—00L871:tayerhla#=[一0I8I5]时,由神经网络得到舯比例系数蛀件。在MATIAB的Simulink环境下设计系统的仿真框目如图2所“‘。厂_=需匿毽_]盯叮袭襄:协L.匝卜喝■};u—世u一,⋯。““采用衰减曲线法进行PID参数的整定.得到PID参数分别为P=I2.,=072,D=026。在l=0s时,加^一个单位阶跃;£:175s时,加^个50%的干扰信号,神经刚络PID与PID的比较曲线如图3所示;为了帻骑神经网络PID的鲁棒性,取传递自数c(s)=丁≠ij号!;譬}丽e’“,即模型失配情况下响应结果如图4所示。帅“””“⋯‰^“⋯“⋯’””目,$Ⅱm**aT#&目镕pII)目PID白勺№#∞‰目4《女女&镕MT#&月镕PID目PID∞№#日|i‰o蕾f《tg}\n148化工自动化及仪表第38卷从图3、4中可以看到,采用神经网络PID控制方法能够得到更好的控制性能和鲁棒性,其结果充分证明了新的控制系统比PID控制系统在系统响应速度、超调量以及延迟时间和增强系统抗干扰能力等特性上均有明显优势。4结束语基于DCS的曝气池溶解氧控制方法在西安蔡伦造纸厂APMP废水处理站得到了成功的运行,并收到的良好的控制效果:当系统进水流量为2500m’/d,COD浓度为2046ms/L,COD负荷为4300kg/d附近时,在DCS控制系统的作用下,COD去除率在87.2%,BOD去除率在95.6%。该系统具有结构简单、调节时间短、调节精度高、稳态性能好和超调量小等优点,因此有必要加大提倡这种控制策略。神经网络PID控制不依靠精确的数学模型,就可以得到满意的控制效果。参考文献高大文,彭永臻,王淑莹等.污水处理智能控制的研究、应用与发展[J].给水排水,2006,18(6):35-39.冯裕钊,龙腾锐.变参数活性污泥系统的最优鲁棒控制法[J].中国给水排水,2003,19(3):14—16.李祖枢,涂亚庆.仿人智能控制[M].北京:国防工业出版社,2003.罗健旭,张兆宁,邵惠鹤.应用基于粗集的模糊神经网络进行软测量建模的研究[J].化工自动化及仪表,2003,30(2):14·18.张秀玲,郑翠翠,黄兴格等.基于参数优化的自适应模糊神经网络控制在污水处理中的应用[J].化工自动化及仪表,2009,36(3):12-14.ApplicationofNeuraINetworkPIDContr01.nAPMPWastewaterTreatmentWANGZhong—fen91,TANGWeil”,HUANGJun.meil,WANGMeng-xia01,2(1.CollegeofElectricandCommunicationEngineering,ShanxiUniversityofScienceandTechnology,Xi’an710021,China;2.XiweiMeasuringandControlEngineeringLimited,Xianyang712081,China)Abstract:Aimingatseverenonlinearityandtime-delayinAlkalinePefoxideMechanicalPulp(APMP)wastewateraerobictreatmentprocess,theAPMPwastewatertreatmentschemewasproposedbasedonneuralnetworkPIDcontrolalgorithm.Theapplicationindicatesthatthisproposedstrategyiseffective.Keywords:neuralnetwork;PID;DO;APMP广告索引西安东风机电有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯封面无锡康宁防爆电器有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯封二ABB(中国)有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯封三艾默生过程控制有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯封四仕富梅亚太有限公司上海分公司⋯⋯⋯⋯⋯⋯⋯前插1重庆海王仪器仪表有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯前插2福斯流体技术(上海)有限公司⋯⋯⋯⋯⋯⋯⋯⋯前插3浙江三方控制阀股份有限公司⋯⋯⋯⋯⋯⋯⋯⋯前插4北京八叶科技有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯前插5四川华林自控科技有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯前插6上海华强仪表有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯前插7天华化工机械及自动化研究设计院⋯⋯⋯⋯⋯⋯前插8艾默生过程控制有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯前插9西门予(中国)有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯前插10天华化工机械及自动化研究设计院检测仪表所⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯内插l启东宏迭防爆电气有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯内插2杭州中创电子有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯内插3先衡自动化仪表(上海)有限公司⋯⋯⋯⋯⋯⋯⋯内插4天华化工机械及自动化研究设计院分析仪表所⋯⋯:⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯··内插5北京西姆宏仪器仪表有限公司⋯⋯⋯⋯⋯⋯⋯⋯内插6天华化工机械及自动化研究设计院工业仪表所⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯内插7上海海能信息科技有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯内插8天毕化工机械及自动化研究设计院仪器仪表所⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯内插9常州市赛德电子有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯内插10无锡市惠华特种仪表有限公司⋯⋯⋯⋯⋯⋯⋯内插11东莞市雅德仪表有限公司⋯⋯⋯⋯⋯⋯⋯⋯⋯内插11眉山麦克在线设备有限公司⋯⋯⋯⋯⋯⋯⋯⋯内插121●-1J,J1Jl2345rL