

- 270.02 KB
- 2023-01-02 08:30:09 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
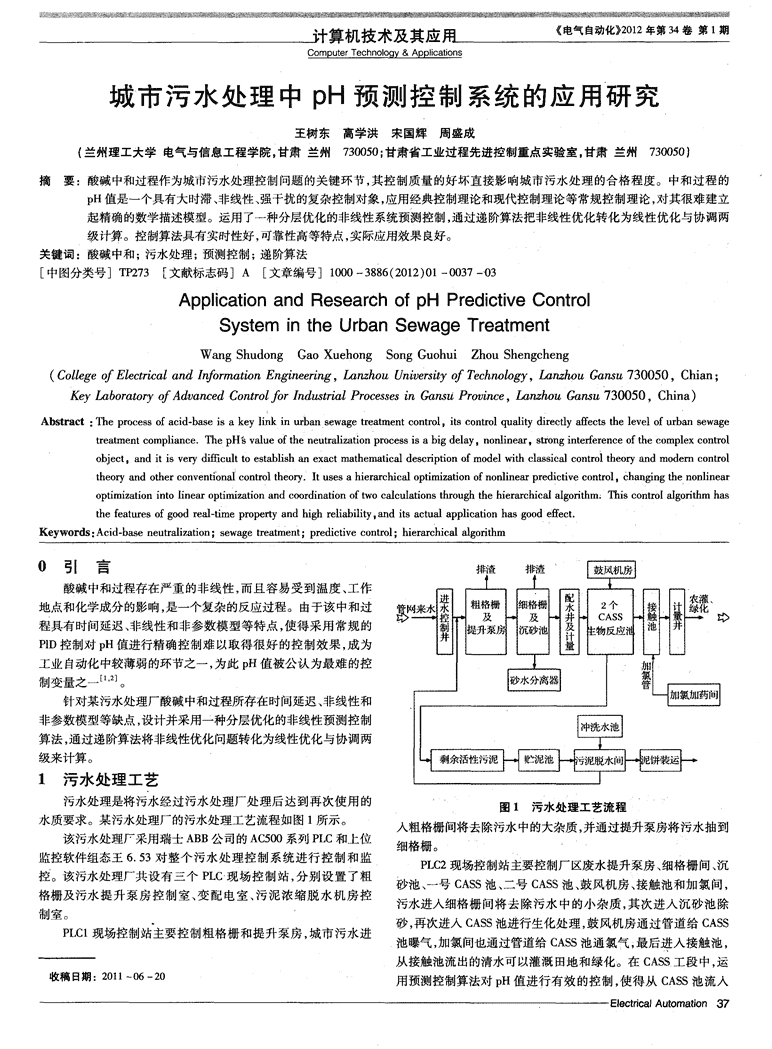
j十算机技术及其应用皇苎竺!竺竺竺兰竺.ComputerTechnoloQy&Applications城市污水处理中pH预测控制系统的应用研究王树东高学洪宋国辉周盛成(兰州理工大学电气与信息工程学院,甘肃兰州730050;甘肃省工业过程先进控制重点实验室。甘肃兰州730050)摘要:酸碱中和过程作为城市污水处理控制问题的关键环节,其控制质量的好坏直接影响城市污水处理的合格程度。中和过程的pH值是一个具有大时滞、非线性、强干扰的复杂控制对象,应用经典控制理论和现代控制理论等常规控制理论,对其很难建立起精确的数学描述模型。运用了一种分层优化的非线性系统预测控制,通过递阶算法把非线性优化转化为线性优化与协调两级计算。控制算法具有实时性好,可靠性高等特点,实际应用效果良好。关键词:酸碱中和;污水处理;预测控制;递阶算法[中图分类号]TP273[文献标志码]A[文章编号]1000—3886(2012)01—0037—03ApplicationandResearchOfpHPredictiveControISystemintheUrbanSewageTreatmentWangShudongGaoXuehongSongGuohuiZhouShengcheng(CollegeofElectricalandInformationEngineering,LanzhouUnive~ityofTechnology,LanzhouGansu730050,Chian;KeyLaboratoryofAdvancedControlforIndustriaZProcessesinGansuProvince,LanzhouGansu730050。China)Abstract:Theprocessofacid—baseisakeylinkinurbansewagetreatmentcontrol。itscontrolqualitydirectlyafectsthelevelofurbansewagetreatmentcompliance.Thepvalueoftheneutralizationprocessisabigdelay,nonlinear,stronginterferenceofthecomplexcontrolobject。anditisverydifficulttoestablishanexactmathematicaldescriptionofmodelwithclassicalcontroltheoryandmoderncontroltheoryandotherconventionaIcontroltheory.Itusesahierarchicaloptimizationofnonlinearpredictivecontrol,changingthenonlinearoptimizationintolinearoptimizationandcoordinationoftwocalculationsthroughthehierarchicalalgorithm:Thiscontrolalgorithmhasthefeaturesofgoodreal—timepropertyandhighreliability,anditsactualapplicationhasgoodefect.Keywords:Acid-baseneutralization;sewagetreatment;predictivecontrol;hierarchicalalgorithmO引言酸碱中和过程存在严重的非线性,而且容易受到温度、工作地点和化学成分的影响,是一个复杂的反应过程。由于该中和过程具有时间延迟、非线性和非参数模型等特点,使得采用常规的P1D控制对pH值进行精确控制难以取得很好的控制效果,成为工业自动化中较薄弱的环节之一,为此pH值被公认为最难的控制变量之一。针对某污水处理厂酸碱中和过程所存在时间延迟、非线性和非参数模型等缺点,设计并采用一种分层优化的非线性预测控制算法,通过递阶算法将非线性优化问题转化为线性优化与协调两级来计算。1污水处理工艺污水处理是将污水经过污水处理厂处理后达到再次使用的图1污水处理工艺流程水质要求。某污水处理厂的污水处理工艺流程如图1所示。入粗格栅间将去除污水中的大杂质,并通过提升泵房将污水抽到该污水处理厂采用瑞士ABB公司的AC500系列PLC和上位细格栅。监控软件组态王6.53对整个污水处理控制系统进行控制和监PLC2现场控制站主要控制厂区废水提升泵房、细格栅间、沉控。该污水处理厂共设有三个PLC现场控制站,分别设置了粗砂池、一号CASS池、二号CASS池、鼓风机房、接触池和加氯间,格栅及污水提升泵房控制室、变配电室、污泥浓缩脱水机房控污水进人细格栅间将去除污水中的小杂质,其次进入沉砂池除制室。砂,再次进入CASS池进行生化处理,鼓风机房通过管道给CASSPLC1现场控制站主要控制粗格栅和提升泵房,城市污水进池曝气,加氯间也通过管道给CASS池通氯气,最后进入接触池,从接触池流出的清水可以灌溉田地和绿化。在CASS工段中,运收稿日期:2011~06—2O用预测控制算法对pH值进行有效的控制,使得从CASS池流人ElectricaJAutomation37\n《电气自动化)2o12年第34卷第1期j十算机技术及其应甩ComputerTechnolo.qy&Application接触池的水的pH在6—8之间。预测控制方法是很困难的。如果控制对象只存在弱非线性时,可PLC3现场控制站主要控制贮泥曝气池和脱水机房,将贮泥以采用线性预测控制算法来控制;但如果控制对象存在强非线性曝气池中的泥抽到脱水机房中,然后采用机械浓缩脱水处理工艺时,线性模型的输出预测与实际的输出偏离很大。控制效果不佳,将泥做成泥饼并外运卫生填埋。所以应当采用非线性模型对控制对象进行预测和优化。由于2系统硬件设计控制对象pH值具有非线性特征,其预测控制结构图如图4所示。该污水处理厂共设有三个PLC现场控制站和一个中心监控室。这三个PLC现场控制站采用的都是瑞士ABB公司的AC500系列的可编程控制器,PLC控制柜的前面板上的触摸屏是威纶通的触摸屏,中心监控室采用的是台湾研华的工控机。根据该污水处理厂控制系统要求进行硬件配置,设置了3个PLC现场控制站,需要控制与检测的变量点数有:183个数字量输入(DI)、69个数字量输出(DO)、18个模拟量输入(AI)、5个模拟量输出(AO)。为了方便以后的点数增加,以上点数统计留取图4预测控制结构图了15%的裕量。系统硬件构成如图2所示。分层递阶优化控制算法的3个主要公式为f(|i})=厂((),u())(1)LY(k)=h(X(.j}))‘其中∈R,ER,Y∈RpU()=Fl()+xo()+F3D(,uo)+F4G()+yr(k)一(k)一E(k)]+F6}(k)(2)(k++1)=A{X(k+)+Bu(尼+)+D((k+),u。(k+))(3)Y(k+)=C(k+)+G((+))(4)其中=1,⋯,P一1于是,基于非线性系统分层优化策略的预测控制算法的流程图2系统硬件配置图如图5所示。同时,该污水处理厂的中心监控室和三个PLC现场控制站通过工业以太网联接,数据可以在上位工控机和现场PLC控制站之间相互传送;PLC与威纶通触摸屏通过RS232通讯线联接,数据同样可以在PLC与触摸屏之间相互传送。该污水处理厂的整个控制系统结构图如图3所示。图3控制系统网络结构3至『于箩。p薏耋⋯非。、⋯冀毫存⋯。C-m-Iz~的中为了使是pH完{全~均匀J问矗题简IJ单化,假设该污水(处理厂所采用迟、非.线性和非参数模型等缺点,所以要找到一种统一的非线性一。⋯一。’。’⋯一一‘⋯⋯⋯⋯\n《电气自动化)2012年第34卷第1期j十算机技术及其应凡ComputerTechnoloqy&Applications型溶液,且溶液在CASS池中发生中和反应时没有混合延时。假出厂水参数报表设F(t)是盐酸溶液的流量(L/rain),u(t)是氢氧化钠溶液的流量报囊峙鸣。2011/DSilt出j~_j’、(L/min)a是盐酸溶液的浓度(mo~L),b是氢氧化钠溶液的浓1:oo257.$.18.黠S7.3021.24度(mo~L),V是反应器的容积(L),W是系统噪声信号(moVL),2:∞6.6.919.5l59.稿强s7S:O0f.52采22o.65S&9s24.50是采样间隔时问(s)。选用的被控对象pH值的数学模型为通4:00t238.522.3561.2327.4sS:oo6.钟7.r19.嚣61.轴2吼7S用化模型6:006.967.9l&6264.9831.2暑,:O0t45毫0I21甜.暑o25.14J..0:O07.3284tl骑娩28秘,6哇=F(t)(口一Y(t))一“(f)(b+Y(t))(5)g:O0.7.18r.821.1361.3623.63lib10:∞:6.勰-7.3l采嚣56.翦27.5lY(t)=10‘“一10‘‘(6)ll:OO6.957.2l轧6158.豹2l312:007.41。7.019.3853.2423.甜13:007.858.121.o655.692&33设Y(t)=1日l—IOH一『,其中Y(t)是离平衡点的距离,=14:007.针8.318.785&3325.{T15:∞7.83&220.36S,.2824.021O是水的平衡常数。16:007.20采721.5260.17.6Sl,:o。6.868.{20.766z3523.15将被控对象pH近似离散化可得到如下公式18:加90T.920.3565.3226.38,,(£+1)=(1一TF())(t)一可bTu(f)一图6运行数据表格㈤)+㈤州H1)(7)5结束语针对CASS池工段中pH值具有非线性特征这一难题,运用根据公式(6)可解得分层优化的非线性系统预测控制算法,运用大系统理论中递阶算lg(8)法求解非线性最优控制的思想,通过递阶算法把非线性问题转化二』为线性问题与协调两级来计算,避免了直接求解非线性问题的困4上位机监控系统难。自污水处理厂投入运行以来,运行状况稳定可靠,实现了污某污水处理厂的上位监控机采甩的是台湾研华的工控机,组水处理自动化,提高了pH值的控制精度,确保了污水排放的达态软件采用的是组态王6.53版本。组态王6.53具有开放性好、标。这说明所采用的预测控制算法是切实可行的,其控制效果令适应性强、开发周期短等优点。该污水处理厂的整个控制系统可人满意,能够满足实时控制的需要。以划分为控制层、监控层、管理层这三个层次结构。监控层的作用是对下连接控制层,对上连接管理层,它能够对现场进行实时参考文献监测与控制。[1]商建东,陈康宁.专家智能pH控制器及其应用[J】.化工自动化及仪监控层在整个控制系统中起着上传下达、组态开发的重要作表,1998,25(3):46—48.·[2]邵惠鹤.工业过程高级控制[M].上海:上海交通大学出版社,1997:用。由于画面、数据、动画是上位监控系统中最主要的三个方面,231—233.并通过对该监控层系统控制要求和拟要实现功能的分析该项目[3]杜晓宁,席裕庚,李少远.复杂系统的预测控制研究[J].电气自动采用组态王6.53对该监控系统进行设计,能够充分借用Win-化,2000,22(5):4—1O.dows的图形编辑功能,能够以动画方式显示各种控制设备(提升[4]诸静,等.智能预测控制及其应用[M].杭州:浙江大学出版社,2002.泵、曝气机、鼓风机等)的状态,它还有报警窗口、实时曲线窗口、[5]席裕庚.预测控制[M].北京:国防工业出版社,1993.历史曲线窗口等,可以方便的生成各种数据报表。同时,它还有[6]GoodwithGC,SinKS.Adaptivefilteringpredictionandcontrol[M].丰富的设备驱动接口和数据链接功能。EnglewoodC1iffs:Prentice—hallInc,1984.因此提出了一种基于分层优化策略的非线性系统预测控制【作者简介】王树东,(1965一),男,山东青岛市人,教授,硕士生导师,主算法,并将它运用到某污水处理厂CASS池工段pH值的控制中,要从事计算机自动控制技术、智能检测技术的教学与应用研究工作;高得到的实际运行结果如图6所示。学洪(1986一),男,江苏常州市人,硕士研究生。(上接第2l页)[2]高钟毓.机电控制工程[M].2版.北京:清华大学出版社,2001:101—102.4结束语[3]陈先锋.PMSM位置伺服系统的分析设计及应用研究[D].南京:南本文在MATLAB/Simulink仿真平台上构建了伺服驱动系统京工业大学,2005.的仿真模型,并设计了转矩负载观测器,实现了负载转矩的辨识[4]刘辉.交流伺服系统及参数辨识算法研究[D1.南京:南京航空航天大学。2005.和定子电流的补偿。仿真结果表明,该负载转矩观测器的设计简[5]陈伯时.电力拖动自动控制系统一运动控制系统[M].3版.北京:机单有效,经补偿后转速特性明显提高,有效的抑制了由负载转矩械工业出版社,2003:46—48.的突变而引起的速度波动,明显的提高了伺服系统的性能。参考文献【作者简介】于乐华(1987一),男,山东省潍坊市人,在读硬士研究生,主要从事运动控制及现代数控技术的研究。[1]郭庆鼎,孙宜标,王丽梅.现代永磁电动机交流伺服系统[M].北京:中国电力出版社,2006:65.Electrica}Automation39