
- 369.85 KB
- 2023-01-02 08:30:26 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
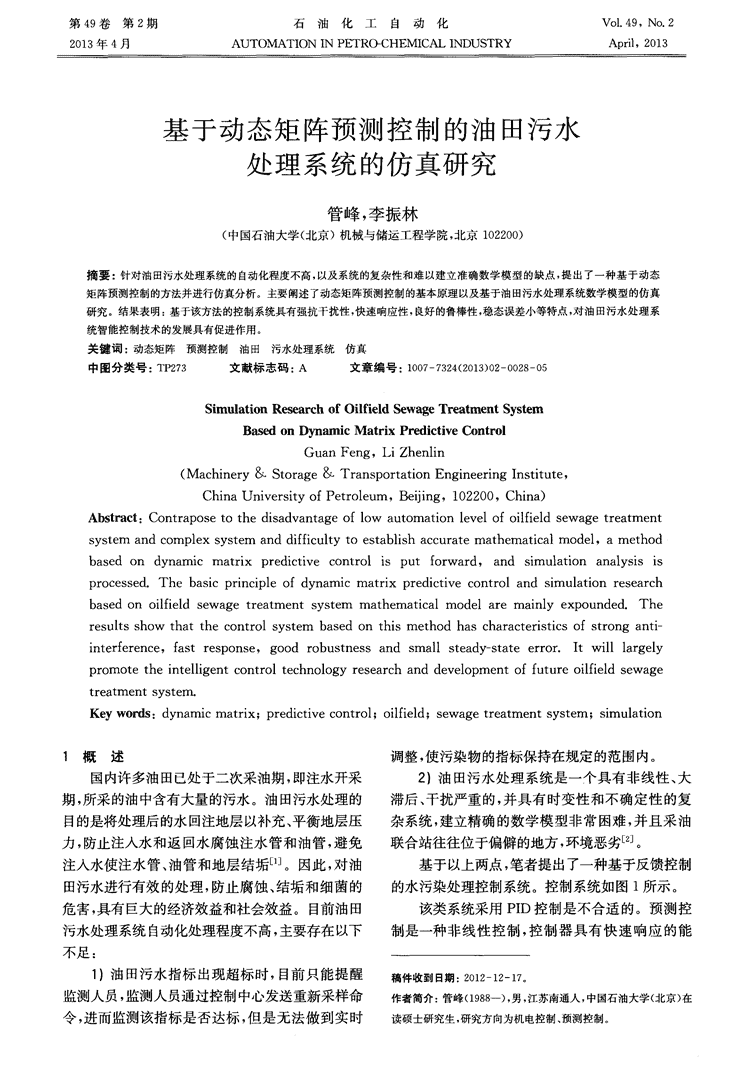
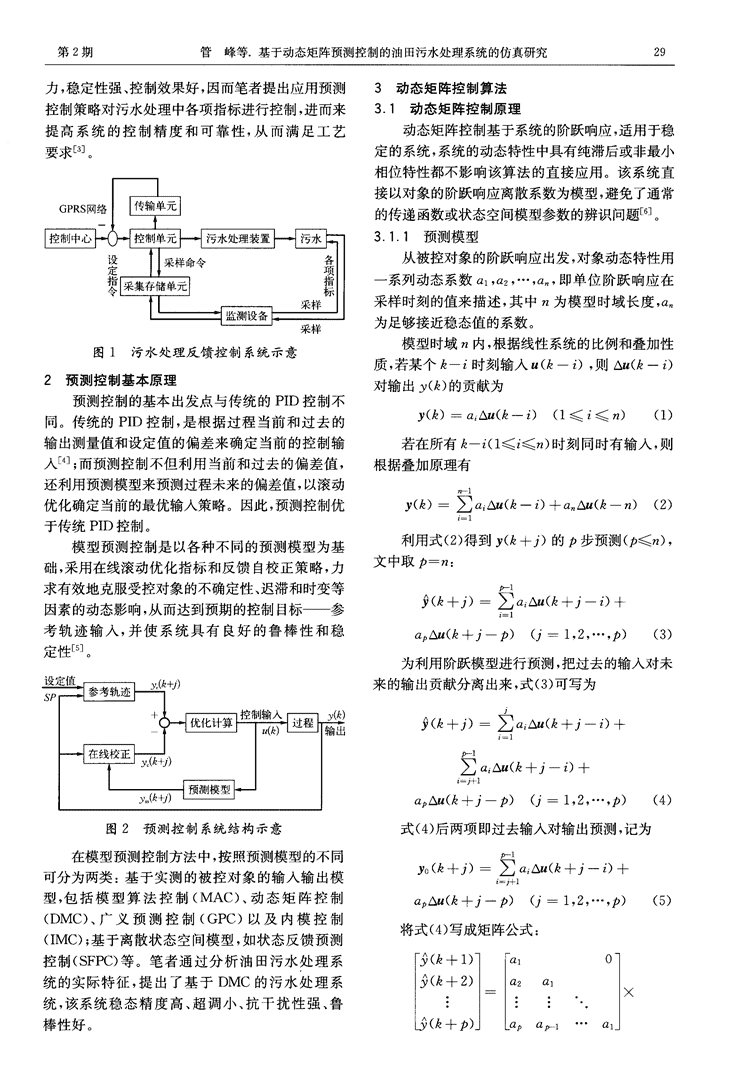
第49卷第2期石油化工自动化Vol_49,No.22013年4月AUT0MAT10NINPETR0一CHEMICALINDUsTRYApril,2013基于动态矩阵预测控制的油田污水处理系统的仿真研究管峰,李振林(中国石油大学(北京)机械与储运工程学院,北京102200)摘要:针对油田污水处理系统的自动化程度不高,以及系统的复杂性和难以建立准确数学模型的缺点,提出了一种基于动态矩阵预测控制的方法并进行仿真分析。主要阐述了动态矩阵预测控制的基本原理以及基于油田污水处理系统数学模型的仿真研究。结果表明:基于该方法的控制系统具有强抗干扰性,快速响应性,良好的鲁棒性,稳态误差小等特点,对油田污水处理系统智能控制技术的发展具有促进作用。关键词:动态矩阵预测控制油田污水处理系统仿真中图分类号:TP273文献标志码:A文章编号:1007—7324(2013)02—0028—05SimulationResearchofOilfieldSewageTreatmentSystemBasedonDynamicMatrixPredictiveControlGuanFeng,LiZhenlin(Machinery&Storage&TransportationEngineeringInstitute。ChinaUniversityofPetroleum,Beijing,102200,China)Abstract:Contraposetothedisadvantageoflowautomationlevelofoilfieldsewagetreatmentsystemandcomplexsystemanddifficultytoestablishaccuratemathematicalmode1,amethodbasedondynamicmatrixpredictivecontrolisputforward,andsimulationanalysisisprocessed.Thebasicprincipleofdynamicmatrixpredictivecontrolandsimulationresearchbasedonoilfieldsewagetreatmentsystemmathematicalmodelaremainlyexpounded.Theresultsshowthatthecontrolsystembasedonthismethodhascharacteristicsofstronganti—interference,fastresponse,goodrobustnessandsmallsteady-stateerror.Itwilllargelypromotetheintelligentcontroltechnologyresearchanddevelopmentoffutureoilfieldsewagetreatmentsystem.Keywords:dynamicmatrix;predictivecontrol;oilfield;sewagetreatmentsystem;simulation1概述调整,使污染物的指标保持在规定的范围内。国内许多油田已处于二次采油期,即注水开采2)油田污水处理系统是一个具有非线性、大期,所采的油中含有大量的污水。油田污水处理的滞后、干扰严重的,并具有时变性和不确定性的复目的是将处理后的水回注地层以补充、平衡地层压杂系统,建立精确的数学模型非常困难,并且采油力,防止注入水和返回水腐蚀注水管和油管,避免联合站往往位于偏僻的地方,环境恶劣_2]。注入水使注水管、油管和地层结垢_】]。因此,对油基于以上两点,笔者提出了一种基于反馈控制田污水进行有效的处理,防止腐蚀、结垢和细菌的的水污染处理控制系统。控制系统如图1所示。危害,具有巨大的经济效益和社会效益。目前油田该类系统采用PID控制是不合适的。预测控污水处理系统自动化处理程度不高,主要存在以下制是一种非线性控制,控制器具有快速响应的能不足:1)油田污水指标出现超标时,目前只能提醒稿件收到日期:2012—12—17。监测人员,监测人员通过控制中心发送重新采样命作者简介:管峰(1988一),男,江苏南通人,中国石油大学(北京)在令,进而监测该指标是否达标,但是无法做到实时读硕士研究生,研究方向为机电控制、预测控制。\n第2期管峰等.基于动态矩阵预测控制的油田污水处理系统的仿真研究29力,稳定性强、控制效果好,因而笔者提出应用预测3动态矩阵控制算法控制策略对污水处理中各项指标进行控制,进而来3.1动态矩阵控制原理提高系统的控制精度和可靠性,从而满足工艺动态矩阵控制基于系统的阶跃响应,适用于稳要求引。定的系统,系统的动态特性中具有纯滞后或非最小相位特性都不影响该算法的直接应用。该系统直接以对象的阶跃响应离散系数为模型,避免了通常的传递函数或状态空间模型参数的辨识问题。3.1.1预测模型从被控对象的阶跃响应出发,对象动态特性用一系列动态系数口,a,⋯,a,即单位阶跃响应在采样时刻的值来描述,其中为模型时域长度,口为足够接近稳态值的系数。模型时域内,根据线性系统的比例和叠加性图1污水处理反馈控制系统示意质,若某个k—i时刻输人U(一),则Au(k—)2预测控制基本原理对输出(是)的贡献为预测控制的基本出发点与传统的PID控制不(志)一nAu(k—)(1≤i≤)(1)同。传统的PID控制,是根据过程当前和过去的输出测量值和设定值的偏差来确定当前的控制输若在所有志一(1≤≤)时刻同时有输人,则入_4;而预测控制不但利用当前和过去的偏差值,根据叠加原理有还利用预测模型来预测过程未来的偏差值,以滚动rr-1—1优化确定当前的最优输入策略。因此,预测控制优()一a~Au(k—)+anAu(k一)(2)一1于传统PID控制。利用式(2)得到y(k+)的P步预测(≤),模型预测控制是以各种不同的预测模型为基文中取一:础,采用在线滚动优化指标和反馈自校正策略,力p--1—求有效地克服受控对象的不确定性、迟滞和时变等.—夕(志+)一∑aiAu(k+—)+因素的动态影响,从而达到预期的控制目标——参z=1考轨迹输入,并使系统具有良好的鲁棒性和稳apAu(k+J一)(一1,2,⋯,)(3)定性引。为利用阶跃模型进行预测,把过去的输入对未来的输出贡献分离出来,式(3)可写为(走+)一∑口Au(k+—)+z一11∑Au(k+一)+z=j+lapAu(k+J一)(J—l,2,⋯,)(4)图2预测控制系统结构示意式(4)后两项即过去输入对输出预测,记为1在模型预测控制方法中,按照预测模型的不同Y。(忌+)一∑以Au(k+—)+可分为两类:基于实测的被控对象的输入输出模i=j+1型,包括模型算法控制(MAC)、动态矩阵控制apAu(k+J—P)(J一1,2,⋯,P)(5)(DMC)、广义预测控制(GPC)以及内模控制将式(4)写成矩阵公式:(IMC);基于离散状态空间模型,如状态反馈预测控制(SFPC)等。笔者通过分析油田污水处理系k+1统的实际特征,提出了基于DMC的污水处理系走+2×统,该系统稳态精度高、超调小、抗干扰性强、鲁棒性好。k+P\n30石油化工自动化第49卷广Au(k)k+1)(是)——系统测量输出值;y——系统给定值。I~xu(k+1)k+2)把式(9)写成矩阵形式:+(6)I;J一(y—w)Q(y—)+△【,RAU(1O)LAu(k+P一1)k+)式中:W—Ew(k+1),w(k+2),⋯,w(k+)];为增加系统的动态稳定性和控制输入的可实Q=c~ag(ql,⋯,q);R一口g(rl,⋯,t"m)。现性,并减少计算量,可将Au向量减少为m维(m<),则系统输出为用y的最优预测值y代替l,,即将式(8)代人k+1)式(10)中,并令一o,得:倪k+2)×0AU一(AQA+R)AQ(w—y加)(11)一Ok4-)式(11)只与k时刻的实际测量值y()有关,Au(k)+1)但求得控制时域m个时刻的控制增量△u(k),Au(k+1)+2)Au(k+1),⋯,△u(k+m一1)。由于受模型误差、(7)非线性特性影响,若等rl1个时刻控制一次,则不能u(k+m一1)+)紧密跟踪期望值,而造成较大偏差,更不能抑制扰动,故仅使用计算出来的m个控制增量的第一个令值,完成实时闭环控制。k时刻的控制增量为^Yp(忌)一[(走+1),(是+2),⋯,(志+)]Au(k)一C(A+R)ArQ(W—y)一zXU(k)一[△(忌),Au(k+1),⋯,Au(k+一1)]d(w一)(12))一Eyo(是+1),Yo(是+2),⋯,Yo(是+)]式中:er一[10⋯0];一(Ar妇+R)ATQ。控制策略确定后,P,m,Q,R都已确定,d可事A==先离线解出。3.1.3反馈校正由于每次实施控制,只采用了第一个控制增量贝0Y(是)一AAU()+Ypo(是)(8)Au(k),故对未来时刻的输出预测为式中:()——预测向量;A一一户×维的常数矩阵,其中:P——优化时域;——控制时域;Y。(志)一Au(k)+Ypo(志)(13)y加(志)——预测初值向量。3.1.2滚动优化动态矩阵控制以优化确定控制策略,在优化过由于对象及环境的不确定性,在k时刻实施控程中,同时考虑输出跟踪期望值和控制量变化来选制后,在+1时刻实际输出y(k+1)与预测输出择最优化准则。往往不希望控制增量Au变化过(+1)一Y。(+1)+a1Au(k)未必相等。在此于剧烈,这一因素在优化性能指标中加人软约束予构成预测误差e(k+1)一y(k+1)一(是+1),并以考虑。因此,k时刻的优化性能指标可取:用此误差加权后修正对未来其他时刻的预测,即:上minJ(k)一∑q[y(是+)一w(k+)]+Yp(足)一Y。(志)+he(是+1)(14)z1式中:卜误差校正向量,常取1,h一,h。,⋯,∑rEAu(k+i一1)](9)—l^]。经校正后的作为下一时刻的预测初值,即式中:w(k+)——参考轨迹值,要求闭环响应沿着Y0(是+)一y(k+i+1),i一1,2,⋯,P一1。一条指定的、光滑的曲线到达新的稳定值,以提高系据此,得矩阵形式:统鲁棒性。一般取w(k+歹)一()+(1一),J一1,2,⋯,,其中,柔化系数,0
相关文档
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看