

- 474.90 KB
- 2023-01-02 08:31:35 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
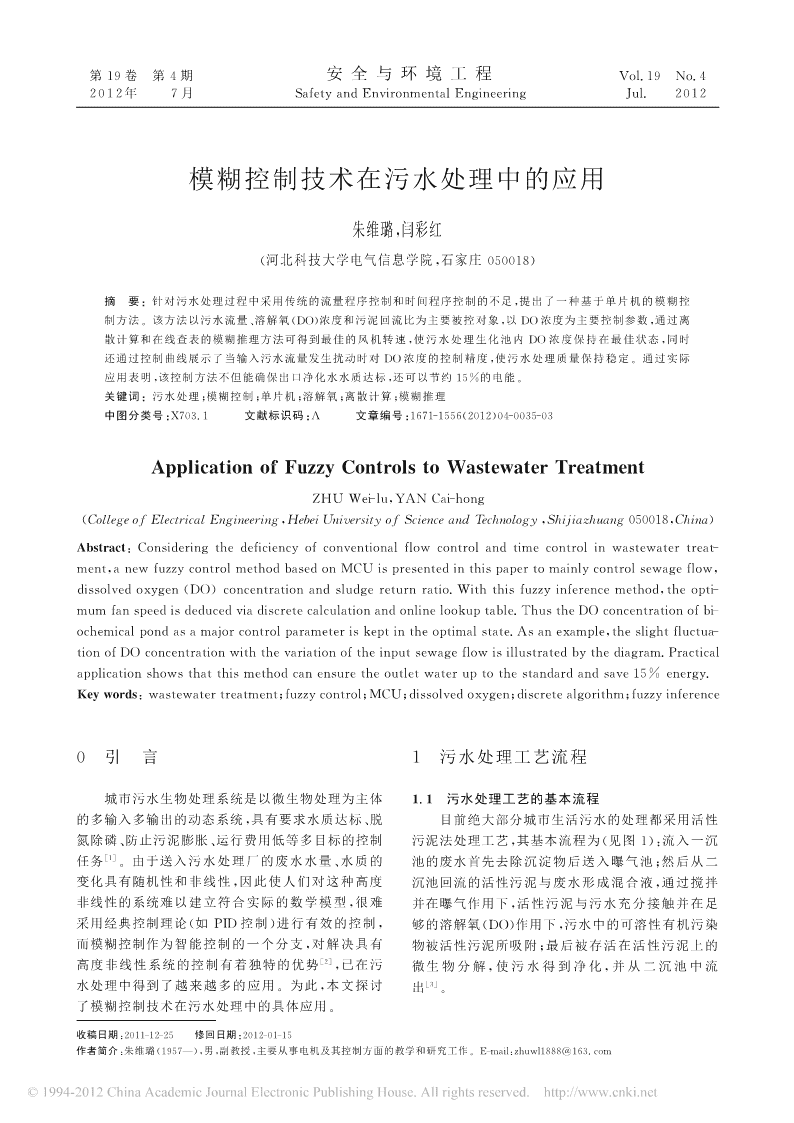
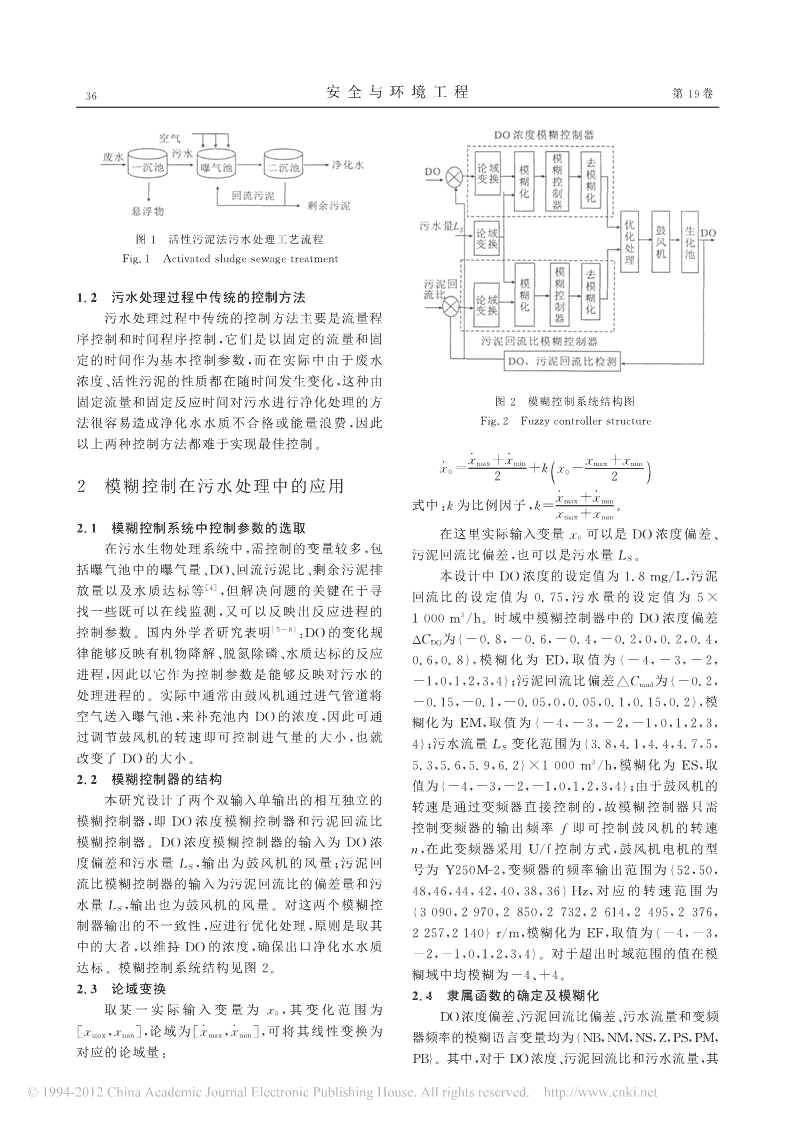
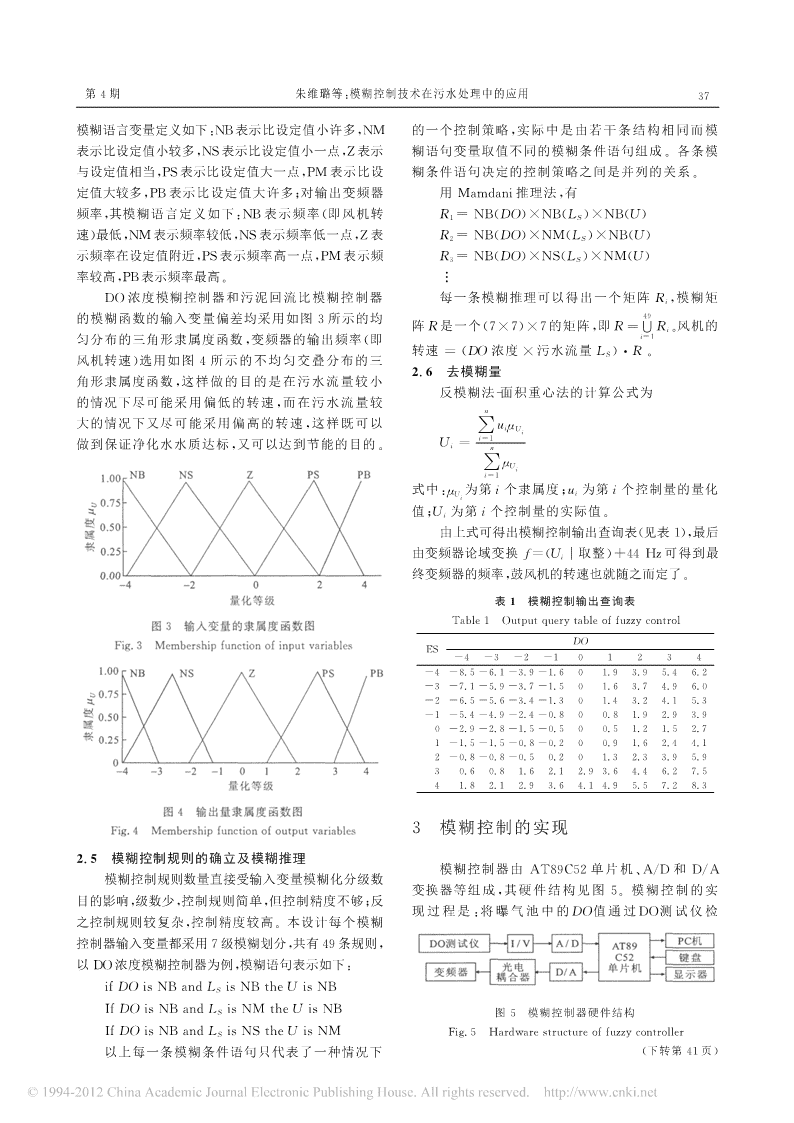
第19卷第4期安全与环境工程Vol.19No.42012年7月SafetyandEnvironmentalEngineeringJul.2012模糊控制技术在污水处理中的应用朱维璐,闫彩红(河北科技大学电气信息学院,石家庄050018)摘要:针对污水处理过程中采用传统的流量程序控制和时间程序控制的不足,提出了一种基于单片机的模糊控制方法。该方法以污水流量、溶解氧(DO)浓度和污泥回流比为主要被控对象,以DO浓度为主要控制参数,通过离散计算和在线查表的模糊推理方法可得到最佳的风机转速,使污水处理生化池内DO浓度保持在最佳状态,同时还通过控制曲线展示了当输入污水流量发生扰动时对DO浓度的控制精度,使污水处理质量保持稳定。通过实际应用表明,该控制方法不但能确保出口净化水水质达标,还可以节约15%的电能。关键词:污水处理;模糊控制;单片机;溶解氧;离散计算;模糊推理中图分类号:X703.1文献标识码:A文章编号:1671-1556(2012)04-0035-03ApplicationofFuzzyControlstoWastewaterTreatmentZHUWei-lu,YANCai-hong(CollegeofElectricalEngineering,HebeiUniversityofScienceandTechnology,Shijiazhuang050018,China)Abstract:Consideringthedeficiencyofconventionalflowcontrolandtimecontrolinwastewatertreat-ment,anewfuzzycontrolmethodbasedonMCUispresentedinthispapertomainlycontrolsewageflow,dissolvedoxygen(DO)concentrationandsludgereturnratio.Withthisfuzzyinferencemethod,theopti-mumfanspeedisdeducedviadiscretecalculationandonlinelookuptable.ThustheDOconcentrationofbi-ochemicalpondasamajorcontrolparameteriskeptintheoptimalstate.Asanexample,theslightfluctua-tionofDOconcentrationwiththevariationoftheinputsewageflowisillustratedbythediagram.Practicalapplicationshowsthatthismethodcanensuretheoutletwateruptothestandardandsave15%energy.Keywords:wastewatertreatment;fuzzycontrol;MCU;dissolvedoxygen;discretealgorithm;fuzzyinference0引言1污水处理工艺流程城市污水生物处理系统是以微生物处理为主体1.1污水处理工艺的基本流程的多输入多输出的动态系统,具有要求水质达标、脱目前绝大部分城市生活污水的处理都采用活性氮除磷、防止污泥膨胀、运行费用低等多目标的控制污泥法处理工艺,其基本流程为(见图1):流入一沉[1]任务。由于送入污水处理厂的废水水量、水质的池的废水首先去除沉淀物后送入曝气池;然后从二变化具有随机性和非线性,因此使人们对这种高度沉池回流的活性污泥与废水形成混合液,通过搅拌非线性的系统难以建立符合实际的数学模型,很难并在曝气作用下,活性污泥与污水充分接触并在足采用经典控制理论(如PID控制)进行有效的控制,够的溶解氧(DO)作用下,污水中的可溶性有机污染而模糊控制作为智能控制的一个分支,对解决具有物被活性污泥所吸附;最后被存活在活性污泥上的[2]高度非线性系统的控制有着独特的优势,已在污微生物分解,使污水得到净化,并从二沉池中流水处理中得到了越来越多的应用。为此,本文探讨[3]出。了模糊控制技术在污水处理中的具体应用。收稿日期:2011-12-25修回日期:2012-01-15作者简介:朱维璐(1957—),男,副教授,主要从事电机及其控制方面的教学和研究工作。E-mail:zhuwl1888@163.com\n36安全与环境工程第19卷图1活性污泥法污水处理工艺流程Fig.1Activatedsludgesewagetreatment1.2污水处理过程中传统的控制方法污水处理过程中传统的控制方法主要是流量程序控制和时间程序控制,它们是以固定的流量和固定的时间作为基本控制参数,而在实际中由于废水浓度、活性污泥的性质都在随时间发生变化,这种由固定流量和固定反应时间对污水进行净化处理的方图2模糊控制系统结构图法很容易造成净化水水质不合格或能量浪费,因此Fig.2Fuzzycontrollerstructure以上两种控制方法都难于实现最佳控制。xxmax+xminxmax+xmin0=+k(x0-)222模糊控制在污水处理中的应用xxmax+min式中:k为比例因子,k=。xmax+xmin2.1模糊控制系统中控制参数的选取在这里实际输入变量x0可以是DO浓度偏差、在污水生物处理系统中,需控制的变量较多,包污泥回流比偏差,也可以是污水量LS。括曝气池中的曝气量、DO、回流污泥比、剩余污泥排本设计中DO浓度的设定值为1.8mg/L,污泥[4]放量以及水质达标等,但解决问题的关键在于寻回流比的设定值为0.75,污水量的设定值为5×找一些既可以在线监测,又可以反映出反应进程的31000m/h。时域中模糊控制器中的DO浓度偏差[5~8]控制参数。国内外学者研究表明:DO的变化规ΔCDO为{-0.8,-0.6,-0.4,-0.2,0,0.2,0.4,律能够反映有机物降解、脱氮除磷、水质达标的反应0.6,0.8},模糊化为ED,取值为{-4,-3,-2,进程,因此以它作为控制参数是能够反映对污水的-1,0,1,2,3,4};污泥回流比偏差△Cmud为{-0.2,处理进程的。实际中通常由鼓风机通过进气管道将-0.15,-0.1,-0.05,0,0.05,0.1,0.15,0.2},模空气送入曝气池,来补充池内DO的浓度,因此可通糊化为EM,取值为{-4,-3,-2,-1,0,1,2,3,过调节鼓风机的转速即可控制进气量的大小,也就4};污水流量LS变化范围为{3.8,4.1,4.4,4.7,5,改变了DO的大小。35.3,5.6,5.9,6.2}×1000m/h,模糊化为ES,取2.2模糊控制器的结构值为{-4,-3,-2,-1,0,1,2,3,4};由于鼓风机的本研究设计了两个双输入单输出的相互独立的转速是通过变频器直接控制的,故模糊控制器只需模糊控制器,即DO浓度模糊控制器和污泥回流比控制变频器的输出频率f即可控制鼓风机的转速模糊控制器。DO浓度模糊控制器的输入为DO浓n,在此变频器采用U/f控制方式,鼓风机电机的型度偏差和污水量LS,输出为鼓风机的风量;污泥回号为Y250M-2,变频器的频率输出范围为{52,50,流比模糊控制器的输入为污泥回流比的偏差量和污48,46,44,42,40,38,36}Hz,对应的转速范围为水量LS,输出也为鼓风机的风量。对这两个模糊控{3090,2970,2850,2732,2614,2495,2376,制器输出的不一致性,应进行优化处理,原则是取其2257,2140}r/m,模糊化为EF,取值为{-4,-3,中的大者,以维持DO的浓度,确保出口净化水水质-2,-1,0,1,2,3,4}。对于超出时域范围的值在模达标。模糊控制系统结构见图2。糊域中均模糊为-4、+4。2.3论域变换2.4隶属函数的确定及模糊化取某一实际输入变量为x0,其变化范围为DO浓度偏差、污泥回流比偏差、污水流量和变频[x,x],论域为[x,x],可将其线性变换为maxminmaxmin器频率的模糊语言变量均为{NB,NM,NS,Z,PS,PM,对应的论域量:PB}。其中,对于DO浓度、污泥回流比和污水流量,其\n第4期朱维璐等:模糊控制技术在污水处理中的应用37模糊语言变量定义如下:NB表示比设定值小许多,NM的一个控制策略,实际中是由若干条结构相同而模表示比设定值小较多,NS表示比设定值小一点,Z表示糊语句变量取值不同的模糊条件语句组成。各条模与设定值相当,PS表示比设定值大一点,PM表示比设糊条件语句决定的控制策略之间是并列的关系。定值大较多,PB表示比设定值大许多;对输出变频器用Mamdani推理法,有频率,其模糊语言定义如下:NB表示频率(即风机转R1=NB(DO)×NB(LS)×NB(U)速)最低,NM表示频率较低,NS表示频率低一点,Z表R2=NB(DO)×NM(LS)×NB(U)示频率在设定值附近,PS表示频率高一点,PM表示频R3=NB(DO)×NS(LS)×NM(U)率较高,PB表示频率最高。DO浓度模糊控制器和污泥回流比模糊控制器每一条模糊推理可以得出一个矩阵Ri,模糊矩的模糊函数的输入变量偏差均采用如图3所示的均49阵R是一个(7×7)×7的矩阵,即R=∪Ri。风机的i=1匀分布的三角形隶属度函数,变频器的输出频率(即转速=(DO浓度×污水流量LS)·R。风机转速)选用如图4所示的不均匀交叠分布的三2.6去模糊量角形隶属度函数,这样做的目的是在污水流量较小反模糊法-面积重心法的计算公式为的情况下尽可能采用偏低的转速,而在污水流量较n大的情况下又尽可能采用偏高的转速,这样既可以uiμU∑ii=1做到保证净化水水质达标,又可以达到节能的目的。Ui=n∑μUii=1式中:μU为第i个隶属度;ui为第i个控制量的量化i值;Ui为第i个控制量的实际值。由上式可得出模糊控制输出查询表(见表1),最后由变频器论域变换f=(Ui│取整)+44Hz可得到最终变频器的频率,鼓风机的转速也就随之而定了。表1模糊控制输出查询表Table1OutputquerytableoffuzzycontrolDOES-4-3-2-101234-4-8.5-6.1-3.9-1.601.93.95.46.2-3-7.1-5.9-3.7-1.501.63.74.96.0-2-6.5-5.6-3.4-1.301.43.24.15.3-1-5.4-4.9-2.4-0.800.81.92.93.90-2.9-2.8-1.5-0.500.51.21.52.71-1.5-1.5-0.8-0.200.91.62.44.12-0.8-0.8-0.50.201.32.33.95.930.60.81.62.12.93.64.46.27.541.82.12.93.64.14.95.57.28.33模糊控制的实现2.5模糊控制规则的确立及模糊推理模糊控制器由AT89C52单片机、A/D和D/A模糊控制规则数量直接受输入变量模糊化分级数变换器等组成,其硬件结构见图5。模糊控制的实目的影响,级数少,控制规则简单,但控制精度不够;反现过程是:将曝气池中的DO值通过DO测试仪检之控制规则较复杂,控制精度较高。本设计每个模糊控制器输入变量都采用7级模糊划分,共有49条规则,以DO浓度模糊控制器为例,模糊语句表示如下:ifDOisNBandLSisNBtheUisNBIfDOisNBandLSisNMtheUisNB图5模糊控制器硬件结构IfDOisNBandLSisNStheUisNMFig.5Hardwarestructureoffuzzycontroller以上每一条模糊条件语句只代表了一种情况下(下转第41页)\n第4期石贾樱子等:铁负载型催化剂在废水处理中的应用41terthroughaheterogeneousphoto-FentonprocesscatalyzedbyFe-[15]Faust,B.,M.R.Hoffmann.Photoinducedreductivedissolutiontreatedlaponite[J].WaterResearch,2009,43(5):1313-1322.ofα-Fe2O3bybisulfite[J].EnvironmentalScienceTechnology,[7]张静,张惠玲,麻园,等.Fe2O3/膨润土微波诱导氧化处理染料废1986,20(9):943-948.水[J].化工环保,2010,30(3):214-218.[16]赵建军.Fe/AC催化剂对苯酚模拟废水的催化湿式氧化[J].浙[8]Liou,R.M.,S.H.Chena,M.Y.Hung.Fe(III)supportedonres-江师范大学学报,2011,34(1):70-74.inaseffectivecatalystfortheheterogeneousoxidationofphenol[17]Mohamed,R.M.,M.A.Rayyani,E.S.Baeissa,etal.Nano-sizedinaqueoussolution[J].Chemosphere,2005,59(1):117-125.Fe-metalcatalystonZnO-SiO2:(Photo-assisteddepositionand[9]刘建,闫英桃,马红娜.载铁阳离子交换树脂去除饮用水中余氯impregnation)Synthesisroutesandnanostructurecharacteriza-的性能研究[J].应用化工,2008,37(11):1331-1334.tion[J].JournalofAlloysandCompounds,2011,509(24):[10]王莹,张娟.负载型催化剂的制备、表征及在水处理中的应用6824-6828.[J].化学工程与装备,2009,(4):29-32.[18]Xi,Y.F.,M.Megharaj,R.Naidu.Dispersionofzerovalentiron[11]Chaliha,S.,K.G.Bhattacharyya.Fe(III)-Co(II)-Ni(II)im-nanoparticlesontobentonitesanduseofthesecatalystsforor-pregnatedMCMdestructionof2,4-dichlorophenolinwater[J].angeIIdecolourisation[J].AppliedClayScience,2011,53(4):CatalysisToday,2009,141(1):225-233.716-722.[12]Muthuvel,I.,M.Swaminathan.HighlysolaractiveFe(III)im-[19]耿春香,张秀霞,赵朝成,等.一种新型光催化剂用于降解腈纶mobilisedaluminaforthedegradationofAcidViolet7[J].Solar废水的研究[J].环境工程学报,2009,3(10):1821-1824.EnergyMaterials&SolarCells,2008,92(8):857-863.[20]Parilti,N.B.,D.Akten.OptimizationofTiO2/Fe(III)/solar[13]何立平,杨迎春,徐成华,等.Fe/活性炭多相类Fenton法湿式氧UVconditionsfortheremovaloforganiccontaminantsinpulp化罗丹明B废水的研究[J].环境工程学报,2009,3(8):1433-milleffluents[J].Desalination,2011,265(1-3):37-42.1437.[21]朱莹佳,肖羽堂,尹玉玲,等.粉煤灰负载Fe3+非均相光催化降[14]Olmos,R.G.,F.F.Holzer,F.D.Kopinkeetal.Indicationsof解苯酚研究[J].工业水处理,2009,29(8):28-31.thereactivespeciesinaheterogeneousFenton-likereactionusing通讯作者:刘祥萱(1963—),女,教授,博士生导师,主要从事环境友Fe-containingzeolites[J].AppliedCatalysisA:General,2011,好材料设计与应用方面的研究。E-mail:wdwwdw1993@163.com398(1-2):44-53.檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵檵(上接第37页)测,再通过I/V变换和A/D转换输入单片机;经单片种慢时变非线性系统中,通过软件进行离散计算、在机对输入数据进行处理后,将其结果经D/A转换,并线查表,并由变频器实现对风机转速的控制,可以达经光电耦合器隔离,送入变频器控制鼓风机的转速。到满意的效果,不仅控制成本低、调节方便、鲁棒性单片机中的ROM用于存放程序和控制规则,上位机高,还可通过上位机进行实时监测,另外在水质达到PC机安装在中心控制室可监控系统运行状况。国家标准的前提下,与传统的控制方法相比,可节约图6为有扰动(设污水阀开度增大)时的模糊控电量约15%,并减少了运行费用。制结果。由图6中DO浓度变化曲线可见,对于存在参考文献:着慢时变的非线性系统,采用模糊控制后,被控量变[1]朱学峰,李艳,黄道平.污水处理过程的控制与优化综述[J].自化较小,说明该系统抗干扰能力较强,稳态精度较高。动化与信息工程,2009,(3):7-13.[2]陈金红,白瑞祥.模糊控制在工业污水处理过程中的应用[J].微计算机应用,2009,30(4):58-61.[3]曾环木.城镇污水采用活性污泥法除磷脱氮工艺探讨[J].广东化工,2009,36(3):61-64.[4]山丹,王金生,李云生,等.城镇污水处理厂活性污泥法处理工艺总量减排核查要点分析———以某污水处理厂为例[J].北京师范大学学报(自然科学版),2009,45(3):290-295.[5]张秀玲,郑翠翠,黄兴格,等.基于参数优化的自适应模糊神经网络控制在污水处理中的应用[J].化工自动化及仪表,2009,36(3):12-14.[6]谢生钢,周立芳,赵麟菱.污水处理过程的多目标多模型预测控制方法研究[J].化工自动化及仪表,2008,35(1):24-27.图6扰动时模糊控制结果[7]李伟民,江映翔,尹大强,等.微生物选育技术在废水生物处理中Fig.6Resultsoffuzzycontrolindisturbance的应用进展[J].环境污染治理技术与设备,2001,2(4):49-52.[8]刘载文,许继平,杨斌,等.序批式活性污泥法污水处理系统溶解氧优化控制方法[J].计算机与应用化学,2007,24(2):231-4结论234.用单片机实现模糊控制,并应用于污水处理这