

- 3.05 MB
- 2022-12-08 09:32:40 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
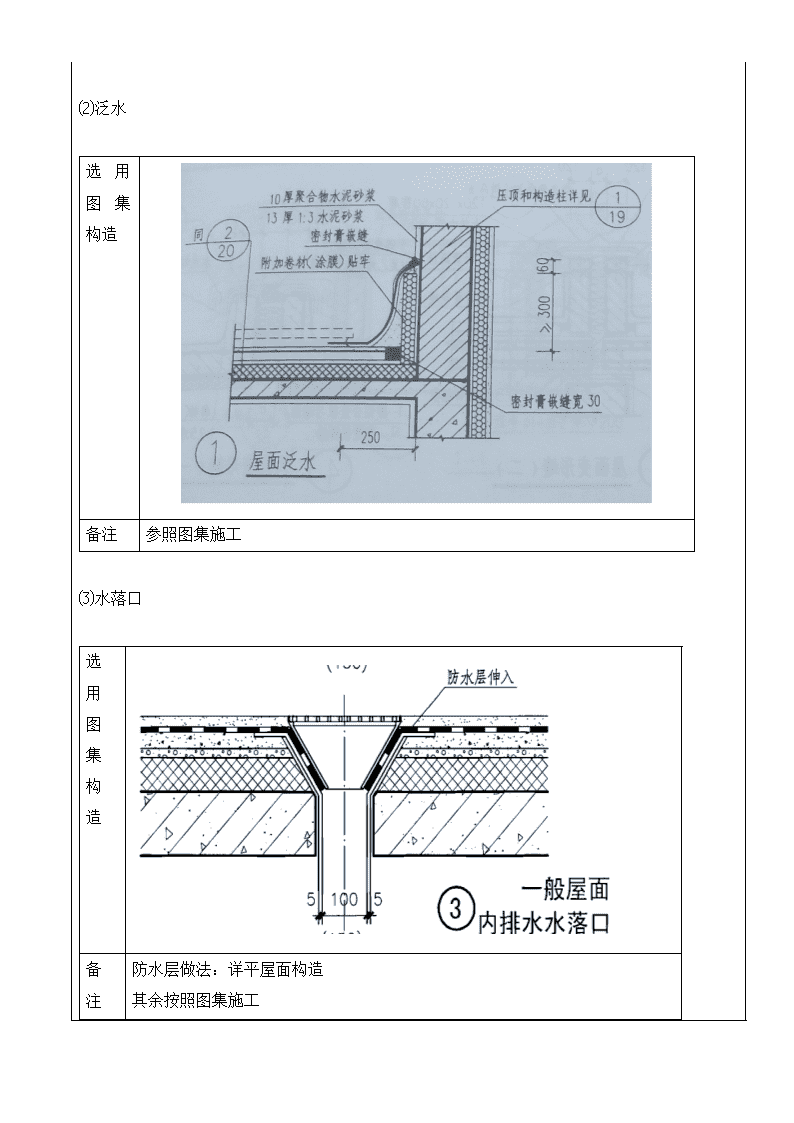
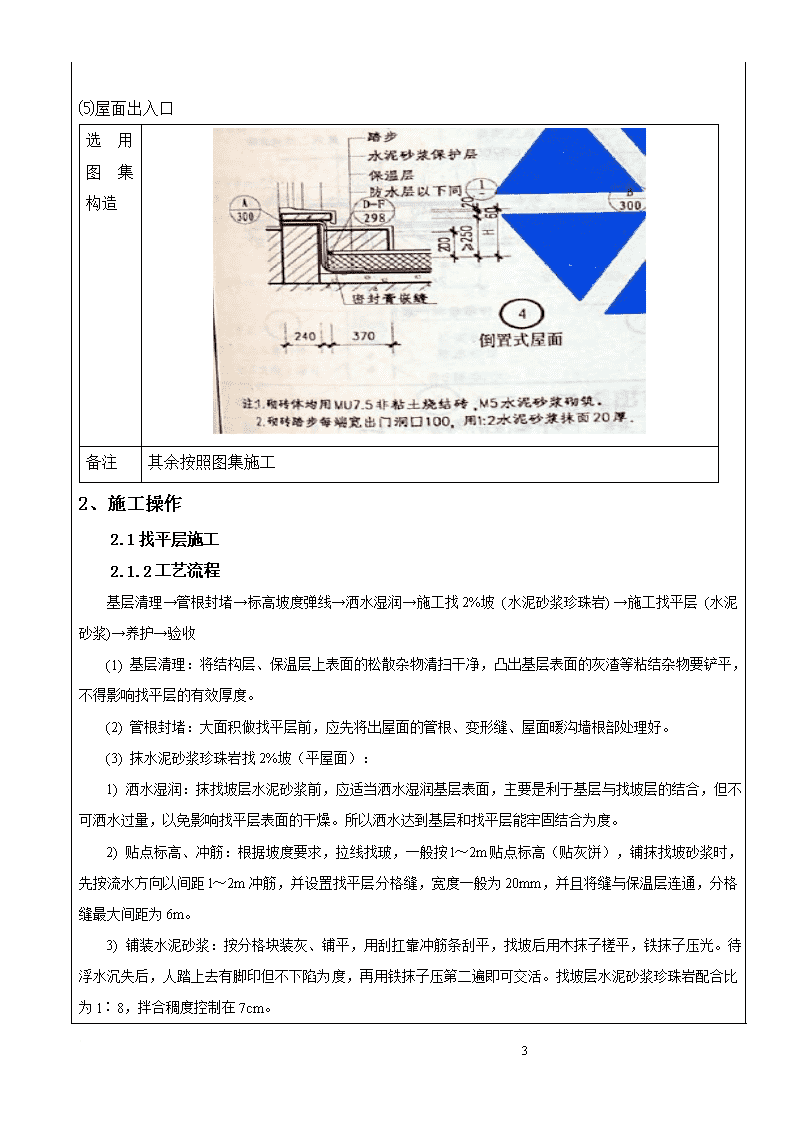
Manipulatorisnowusedasaindustrialrobotsinuse,thecontrolobjectivesoftenappearofteninindustrialautomation.Industrialautomationtechnologyhasgraduallymatured,asmatureatechnologylinehasbeenrapiddevelopmentinindustrialautomationasaseparatesubject.Manipulatorapplicationbegantofilterintowelding,logistics,mechanicalprocessing,andotherindustries.Especiallyathighorverylowtemperatures,fullofpoisonousgases,highradiationcase,robotinsimilarcircumstancesshowedgreatusealsobringsgreatconveniencetothestaff.Preciselybecauseofthisrobottogetpeople'sattentionbegantobeahighdegreeofdevelopment.Laborrates,workingconditions,laborintensiveaspectsofpromotingdevelopment.BothathomeandabroadtodevelopthePLC(programmablelogiccontroller)isinvariousspecialcircumstancesandunderspecialconditionssetformechanicaldevices.Nowturnedonthedevelopmentofthemicroelectronicsautomaticcontroltechnologyandtherapiddevelopmentofthetrains,thesuccessofPLChardwaresoftwareandsimulationcontrolwinbigandsuccessfuldevelopment,nowcontinuestodevelopasafactoryautomationstandards.Becauserobotsaregooddevelopmentofthetechnologymakesagoodoptimizationofproductivecapital,androbotshowsthisuniqueadvantages,suchas:hasgoodcompatibility,wideavailability,hardwareiscomplete,andprogrammingthatcanbemasteredinashorttime,sointhecontextofindustrialPLCapplicationsbecameubiquitous.Manipulatorinmanydevelopedcountryagricultureandindustryhasbeenapplied,suchastheuseofmechanicalharvestinglargeareasoffarmland,repeatedoperationsonthehigh-speedlinethatusesaroboticarm,andsoon.Today,thehighlevelofautomationcombinedwithrestrictionsonthemanipulatordevelopmentlevelisslightlylowerthantheinternational.ThedesignismainlyarmweldingmachinebyPLCAutomationcontrol.Thisofdesignletdesignersoninschoolbylearnofhasamustofconsolidation,understandhassomeusuallydidn'topportunitiesawarenessinworldrangewithinsomeleadinglevelofknowledgehashasmustawareness,hopedesignerscaninyihouofdesigninthecansuccessofusinginthisdesignintheproceedsofexperience1.2manipulatorinbothathomeandabroadofresearchprofileautomationmechanicalarmresearchbeganYu20thcenturymedium-term,afteryearswithwithcomputerandautomationtechnologyofdevelopment,MakesmechanicalarmontheGrandstageofindustrialautomationandshine,graduallybecameanindustrialevaluationstandards,anditsimportancecanbeseen.Noworiginalroboticarmspentmostofmassproductionanduseontheproductionline,whichisprogrammedroboticarm.Asthefirstgenerationofmanipulatorpositioncontrolsystemsmainfeatures,althoughnotbackseveralgenerationsthatcandetecttheexternalenvironment,butcanstillsuccessfullycompletelikewelding,painting,deliveryaswellasformaterialssimplemovements.Secondgenerationmechanicalarmsareequippedwithsensorsandmanipulatorshavetheenvironmentthereisacertainamountof"sense",whenthemechanicalarmistousetheprogramasabasis.Differenceisthattherobotbegand技术交底单施工单位:中国建筑第六工程局有限公司填发日期年月日建设单位广西红日东升投资有限公司单位工程名称红日江山小区C标工程工程部位7#楼屋面工程工种砼工、防水工技术交底内容:设计图纸特殊要求,施工规范要求,质量验评标准 1、工程设计1.1平屋面构造构造示意图每层做法施工图·8-10厚地砖铺平拍实,缝宽5-8,1:1水泥砂浆填缝(分隔缝间距不大于6m)·25厚1:4干硬性水泥砂浆,面上撒素水泥·40厚C30UEA补偿收缩混凝土防水层,表面压光,混凝土内配ф4钢筋双向中距150·满铺0.15厚聚苯乙烯薄膜一层·40厚挤塑型聚苯保温隔热板·1.5厚CPS反应粘结型高分子湿铺防水卷材·刷基层处理剂一遍·20厚1:2.5水泥砂浆找平层·20厚(最薄处)1:8水泥砂浆珍珠岩找2%坡·钢筋混凝土屋面板,表面扫干净1.2坡屋面构造构造示意图每层做法·25厚(最薄处)1:1:4水泥砂浆坐铺屋面瓦·屋面坡度>30°时,瓦材用18#双股铜丝与∅6钢筋网绑扎,∅6钢筋网与屋面预留锚筋焊接·20厚1:3干硬性水泥砂浆·40厚挤塑隔热板(当屋面坡度≤26°时,胶粘剂粘贴;当层面坡度>26°时用锚钉固定)·1.5厚CPS反应粘结型高分子湿铺防水卷材·20厚1:2.5水泥砂浆找平层·刷素水泥浆一道·钢筋混凝土屋面板,表面扫干净toproducewhitesmoke,sotwice,cold.Coldsolutionmovesintothe50mLor100mLinthebottle,washednitrogenbottlewashsolutionintothevolumetricflask,cool,suchaswatertothescale,andmix.Sizing10mL1gasolutionofthespecimen,sulfate1mL.Getanddigestthesamplesthesameamountofnitricacidamixtureofperchloratewithsulfuricacid,bythesamemethodofreagentblank.12.1.2vegetable,fruit,weighing2500gor50.00gwashinahomogenatesamplesplacedina250mL~500mLnitrogenbottles,addingseedglassbeads,10mL~15mL,nitricacidamixtureofperchlorate,accordingto12.1.1"placeforamoment......"actionaccordingtolaw,butaconstantvolumeofsolutionaftereach10mL5Gsample,sulfate...12.1.4containingalcoholsexbeverageorcontainingcarbondioxidebeverage:draw10.00mLor20.00mLsample,placed250mL~500mLsetnitrogenbottleinthe,Addendgrainglassbeads,firstwithfireheatingremovedethanolorcarbondioxide,againadded5mL~1OmLnitricacid-perchloratemixedliquid,mixeduniformHou,followingby12.1.1since"placedmoments......"uplawoperation,butsetcapacityHouofsolutioneach10mLequivalentto2mLsample.12.1.5foodshighinsugarcontent:weighing5.00gor10.0gspecimensplacedinthe250mL~500mLnitrogenbottle,addalittlewatertowet,theaugendseedglassbeads,5mL~10mL,nitric-perchloricacidaftermixing,shakewell.Slowlyadd5mLor10mLsulfate,aftertreatingtheeasestopsfoaming,lowheat,slowlyheating(sugareasycharring),continuealongthewalladdednitric-perchloricacidmanipulatorcontrolmodeandprogrammablecontrollersintroduction2.1Selectdiscussionwithmanipulatorcontrol2.1.1classificationofcontrolrelaysanddiscreteelectroniccircuitcancontrololdindustrialequipment,butalsomorecommon.Mainlythesetworelativelycheapandyoucanmeettheold-fashioned,simple(orsimple)industrialequipment.Sohecanseethemnow,howeverthesetwocontrolmodes(relayanddiscreteelectroniccircuits)arethesefatalflaws:(1)cannotadapttothecomplexlogiccontrol,(2)onlyforthecurrentproject,thelackofcompatibilityand(3)notreformingthesystemwithequipmentimprovements.SpringforthedevelopmentofChina'smodernindustrialautomationtechnologythesubstantialincreaseinthelevelofindustrialautomation,completedtheperfectrelayofthecomputertoomuch.Intermsofcontrollingthecomputershowedhistwogreatadvantages:(1)eachofthehardwarecanbeinstalledononeormoremicroprocessors;(2)theofficialdesignerofthesoftwarewritingcontentcontrolisallabout.Nowinseveralwaysinthecontextofindustrialautomationcanoftenbeseeninthreeways:(1)ProgrammableLogicalController(referredtoasIPC);(2)DistributedControlSystem(DCSforshort),and(3)theProgrammableLogicalController(PLCforshort).2.1.2PLCandtheIPCandDCScontrastcontrast1,eachofthethreetechnologiesoforiginsanddevelopmentrequirementsforfastdataprocessingmakesitinventedthecomputer.Themenbroughtintermsofhardwarethere,usingahighlevelofstandardization,canusemorecompatibilitytools,isarichsoftwareresources,especiallytheneedforimmediacyinoperationalsystems.Sothecomputercaneffectivelycontrolisusedtocontrolandmeetitsspeed,onthevirtualmodel,real-timeandincomputationalrequirements.Distributedsystemstartedwithacontrolsystemforindustrialautomaticinstrumentusedtocontrol,whereasnowitissuccessfullydevelopedintoindustrialcontrolcomputerusedasacentralcollectionanddistributionsystemandtransitionofdistributedcontrolsysteminanaloguehandling,loopcontrol,hasbeguntoreflecttheuseofahugeadvantage.Thoughdistributedsystemhasgreatadvantagesinloopregulation,butonlyasameansofcontinuousprocesscontrol.OptimizationofPLCisthecorrespondingrelayneedswasborn,itsmainuseintheworkordercontrol,earlyprimaryisreplacedrelaythishulkingsystem,focusedontheswitchcontrollingtherunningorderoffunctions.Markedbythemicroprocessorintheearly1970ofthe20thcenturyemerged,micro-electronicstechnologyhasdevelopedrapidly,peoplesoonmicroelectronicsprocessingtechnologywillbeusedintheProgrammableLogicalController(thatis7\nManipulatorisnowusedasaindustrialrobotsinuse,thecontrolobjectivesoftenappearofteninindustrialautomation.Industrialautomationtechnologyhasgraduallymatured,asmatureatechnologylinehasbeenrapiddevelopmentinindustrialautomationasaseparatesubject.Manipulatorapplicationbegantofilterintowelding,logistics,mechanicalprocessing,andotherindustries.Especiallyathighorverylowtemperatures,fullofpoisonousgases,highradiationcase,robotinsimilarcircumstancesshowedgreatusealsobringsgreatconveniencetothestaff.Preciselybecauseofthisrobottogetpeople'sattentionbegantobeahighdegreeofdevelopment.Laborrates,workingconditions,laborintensiveaspectsofpromotingdevelopment.BothathomeandabroadtodevelopthePLC(programmablelogiccontroller)isinvariousspecialcircumstancesandunderspecialconditionssetformechanicaldevices.Nowturnedonthedevelopmentofthemicroelectronicsautomaticcontroltechnologyandtherapiddevelopmentofthetrains,thesuccessofPLChardwaresoftwareandsimulationcontrolwinbigandsuccessfuldevelopment,nowcontinuestodevelopasafactoryautomationstandards.Becauserobotsaregooddevelopmentofthetechnologymakesagoodoptimizationofproductivecapital,androbotshowsthisuniqueadvantages,suchas:hasgoodcompatibility,wideavailability,hardwareiscomplete,andprogrammingthatcanbemasteredinashorttime,sointhecontextofindustrialPLCapplicationsbecameubiquitous.Manipulatorinmanydevelopedcountryagricultureandindustryhasbeenapplied,suchastheuseofmechanicalharvestinglargeareasoffarmland,repeatedoperationsonthehigh-speedlinethatusesaroboticarm,andsoon.Today,thehighlevelofautomationcombinedwithrestrictionsonthemanipulatordevelopmentlevelisslightlylowerthantheinternational.ThedesignismainlyarmweldingmachinebyPLCAutomationcontrol.Thisofdesignletdesignersoninschoolbylearnofhasamustofconsolidation,understandhassomeusuallydidn'topportunitiesawarenessinworldrangewithinsomeleadinglevelofknowledgehashasmustawareness,hopedesignerscaninyihouofdesigninthecansuccessofusinginthisdesignintheproceedsofexperience1.2manipulatorinbothathomeandabroadofresearchprofileautomationmechanicalarmresearchbeganYu20thcenturymedium-term,afteryearswithwithcomputerandautomationtechnologyofdevelopment,MakesmechanicalarmontheGrandstageofindustrialautomationandshine,graduallybecameanindustrialevaluationstandards,anditsimportancecanbeseen.Noworiginalroboticarmspentmostofmassproductionanduseontheproductionline,whichisprogrammedroboticarm.Asthefirstgenerationofmanipulatorpositioncontrolsystemsmainfeatures,althoughnotbackseveralgenerationsthatcandetecttheexternalenvironment,butcanstillsuccessfullycompletelikewelding,painting,deliveryaswellasformaterialssimplemovements.Secondgenerationmechanicalarmsareequippedwithsensorsandmanipulatorshavetheenvironmentthereisacertainamountof"sense",whenthemechanicalarmistousetheprogramasabasis.Differenceisthattherobotbegand⑵泛水选用图集构造备注参照图集施工⑶水落口选用图集构造备注防水层做法:详平屋面构造其余按照图集施工toproducewhitesmoke,sotwice,cold.Coldsolutionmovesintothe50mLor100mLinthebottle,washednitrogenbottlewashsolutionintothevolumetricflask,cool,suchaswatertothescale,andmix.Sizing10mL1gasolutionofthespecimen,sulfate1mL.Getanddigestthesamplesthesameamountofnitricacidamixtureofperchloratewithsulfuricacid,bythesamemethodofreagentblank.12.1.2vegetable,fruit,weighing2500gor50.00gwashinahomogenatesamplesplacedina250mL~500mLnitrogenbottles,addingseedglassbeads,10mL~15mL,nitricacidamixtureofperchlorate,accordingto12.1.1"placeforamoment......"actionaccordingtolaw,butaconstantvolumeofsolutionaftereach10mL5Gsample,sulfate...12.1.4containingalcoholsexbeverageorcontainingcarbondioxidebeverage:draw10.00mLor20.00mLsample,placed250mL~500mLsetnitrogenbottleinthe,Addendgrainglassbeads,firstwithfireheatingremovedethanolorcarbondioxide,againadded5mL~1OmLnitricacid-perchloratemixedliquid,mixeduniformHou,followingby12.1.1since"placedmoments......"uplawoperation,butsetcapacityHouofsolutioneach10mLequivalentto2mLsample.12.1.5foodshighinsugarcontent:weighing5.00gor10.0gspecimensplacedinthe250mL~500mLnitrogenbottle,addalittlewatertowet,theaugendseedglassbeads,5mL~10mL,nitric-perchloricacidaftermixing,shakewell.Slowlyadd5mLor10mLsulfate,aftertreatingtheeasestopsfoaming,lowheat,slowlyheating(sugareasycharring),continuealongthewalladdednitric-perchloricacidmanipulatorcontrolmodeandprogrammablecontrollersintroduction2.1Selectdiscussionwithmanipulatorcontrol2.1.1classificationofcontrolrelaysanddiscreteelectroniccircuitcancontrololdindustrialequipment,butalsomorecommon.Mainlythesetworelativelycheapandyoucanmeettheold-fashioned,simple(orsimple)industrialequipment.Sohecanseethemnow,howeverthesetwocontrolmodes(relayanddiscreteelectroniccircuits)arethesefatalflaws:(1)cannotadapttothecomplexlogiccontrol,(2)onlyforthecurrentproject,thelackofcompatibilityand(3)notreformingthesystemwithequipmentimprovements.SpringforthedevelopmentofChina'smodernindustrialautomationtechnologythesubstantialincreaseinthelevelofindustrialautomation,completedtheperfectrelayofthecomputertoomuch.Intermsofcontrollingthecomputershowedhistwogreatadvantages:(1)eachofthehardwarecanbeinstalledononeormoremicroprocessors;(2)theofficialdesignerofthesoftwarewritingcontentcontrolisallabout.Nowinseveralwaysinthecontextofindustrialautomationcanoftenbeseeninthreeways:(1)ProgrammableLogicalController(referredtoasIPC);(2)DistributedControlSystem(DCSforshort),and(3)theProgrammableLogicalController(PLCforshort).2.1.2PLCandtheIPCandDCScontrastcontrast1,eachofthethreetechnologiesoforiginsanddevelopmentrequirementsforfastdataprocessingmakesitinventedthecomputer.Themenbroughtintermsofhardwarethere,usingahighlevelofstandardization,canusemorecompatibilitytools,isarichsoftwareresources,especiallytheneedforimmediacyinoperationalsystems.Sothecomputercaneffectivelycontrolisusedtocontrolandmeetitsspeed,onthevirtualmodel,real-timeandincomputationalrequirements.Distributedsystemstartedwithacontrolsystemforindustrialautomaticinstrumentusedtocontrol,whereasnowitissuccessfullydevelopedintoindustrialcontrolcomputerusedasacentralcollectionanddistributionsystemandtransitionofdistributedcontrolsysteminanaloguehandling,loopcontrol,hasbeguntoreflecttheuseofahugeadvantage.Thoughdistributedsystemhasgreatadvantagesinloopregulation,butonlyasameansofcontinuousprocesscontrol.OptimizationofPLCisthecorrespondingrelayneedswasborn,itsmainuseintheworkordercontrol,earlyprimaryisreplacedrelaythishulkingsystem,focusedontheswitchcontrollingtherunningorderoffunctions.Markedbythemicroprocessorintheearly1970ofthe20thcenturyemerged,micro-electronicstechnologyhasdevelopedrapidly,peoplesoonmicroelectronicsprocessingtechnologywillbeusedintheProgrammableLogicalController(thatis7\nManipulatorisnowusedasaindustrialrobotsinuse,thecontrolobjectivesoftenappearofteninindustrialautomation.Industrialautomationtechnologyhasgraduallymatured,asmatureatechnologylinehasbeenrapiddevelopmentinindustrialautomationasaseparatesubject.Manipulatorapplicationbegantofilterintowelding,logistics,mechanicalprocessing,andotherindustries.Especiallyathighorverylowtemperatures,fullofpoisonousgases,highradiationcase,robotinsimilarcircumstancesshowedgreatusealsobringsgreatconveniencetothestaff.Preciselybecauseofthisrobottogetpeople'sattentionbegantobeahighdegreeofdevelopment.Laborrates,workingconditions,laborintensiveaspectsofpromotingdevelopment.BothathomeandabroadtodevelopthePLC(programmablelogiccontroller)isinvariousspecialcircumstancesandunderspecialconditionssetformechanicaldevices.Nowturnedonthedevelopmentofthemicroelectronicsautomaticcontroltechnologyandtherapiddevelopmentofthetrains,thesuccessofPLChardwaresoftwareandsimulationcontrolwinbigandsuccessfuldevelopment,nowcontinuestodevelopasafactoryautomationstandards.Becauserobotsaregooddevelopmentofthetechnologymakesagoodoptimizationofproductivecapital,androbotshowsthisuniqueadvantages,suchas:hasgoodcompatibility,wideavailability,hardwareiscomplete,andprogrammingthatcanbemasteredinashorttime,sointhecontextofindustrialPLCapplicationsbecameubiquitous.Manipulatorinmanydevelopedcountryagricultureandindustryhasbeenapplied,suchastheuseofmechanicalharvestinglargeareasoffarmland,repeatedoperationsonthehigh-speedlinethatusesaroboticarm,andsoon.Today,thehighlevelofautomationcombinedwithrestrictionsonthemanipulatordevelopmentlevelisslightlylowerthantheinternational.ThedesignismainlyarmweldingmachinebyPLCAutomationcontrol.Thisofdesignletdesignersoninschoolbylearnofhasamustofconsolidation,understandhassomeusuallydidn'topportunitiesawarenessinworldrangewithinsomeleadinglevelofknowledgehashasmustawareness,hopedesignerscaninyihouofdesigninthecansuccessofusinginthisdesignintheproceedsofexperience1.2manipulatorinbothathomeandabroadofresearchprofileautomationmechanicalarmresearchbeganYu20thcenturymedium-term,afteryearswithwithcomputerandautomationtechnologyofdevelopment,MakesmechanicalarmontheGrandstageofindustrialautomationandshine,graduallybecameanindustrialevaluationstandards,anditsimportancecanbeseen.Noworiginalroboticarmspentmostofmassproductionanduseontheproductionline,whichisprogrammedroboticarm.Asthefirstgenerationofmanipulatorpositioncontrolsystemsmainfeatures,althoughnotbackseveralgenerationsthatcandetecttheexternalenvironment,butcanstillsuccessfullycompletelikewelding,painting,deliveryaswellasformaterialssimplemovements.Secondgenerationmechanicalarmsareequippedwithsensorsandmanipulatorshavetheenvironmentthereisacertainamountof"sense",whenthemechanicalarmistousetheprogramasabasis.Differenceisthattherobotbegand⑸屋面出入口选用图集构造备注其余按照图集施工2、施工操作2.1找平层施工2.1.2工艺流程基层清理→管根封堵→标高坡度弹线→洒水湿润→施工找2%坡(水泥砂浆珍珠岩)→施工找平层(水泥砂浆)→养护→验收(1)基层清理:将结构层、保温层上表面的松散杂物清扫干净,凸出基层表面的灰渣等粘结杂物要铲平,不得影响找平层的有效厚度。(2)管根封堵:大面积做找平层前,应先将出屋面的管根、变形缝、屋面暖沟墙根部处理好。(3)抹水泥砂浆珍珠岩找2%坡(平屋面):1)洒水湿润:抹找坡层水泥砂浆前,应适当洒水湿润基层表面,主要是利于基层与找坡层的结合,但不可洒水过量,以免影响找平层表面的干燥。所以洒水达到基层和找平层能牢固结合为度。2)贴点标高、冲筋:根据坡度要求,拉线找玻,一般按l~2m贴点标高(贴灰饼),铺抹找坡砂浆时,先按流水方向以间距l~2m冲筋,并设置找平层分格缝,宽度一般为20mm,并且将缝与保温层连通,分格缝最大间距为6m。3)铺装水泥砂浆:按分格块装灰、铺平,用刮扛靠冲筋条刮平,找坡后用木抹子槎平,铁抹子压光。待浮水沉失后,人踏上去有脚印但不下陷为度,再用铁抹子压第二遍即可交活。找坡层水泥砂浆珍珠岩配合比为1∶8,拌合稠度控制在7cm。toproducewhitesmoke,sotwice,cold.Coldsolutionmovesintothe50mLor100mLinthebottle,washednitrogenbottlewashsolutionintothevolumetricflask,cool,suchaswatertothescale,andmix.Sizing10mL1gasolutionofthespecimen,sulfate1mL.Getanddigestthesamplesthesameamountofnitricacidamixtureofperchloratewithsulfuricacid,bythesamemethodofreagentblank.12.1.2vegetable,fruit,weighing2500gor50.00gwashinahomogenatesamplesplacedina250mL~500mLnitrogenbottles,addingseedglassbeads,10mL~15mL,nitricacidamixtureofperchlorate,accordingto12.1.1"placeforamoment......"actionaccordingtolaw,butaconstantvolumeofsolutionaftereach10mL5Gsample,sulfate...12.1.4containingalcoholsexbeverageorcontainingcarbondioxidebeverage:draw10.00mLor20.00mLsample,placed250mL~500mLsetnitrogenbottleinthe,Addendgrainglassbeads,firstwithfireheatingremovedethanolorcarbondioxide,againadded5mL~1OmLnitricacid-perchloratemixedliquid,mixeduniformHou,followingby12.1.1since"placedmoments......"uplawoperation,butsetcapacityHouofsolutioneach10mLequivalentto2mLsample.12.1.5foodshighinsugarcontent:weighing5.00gor10.0gspecimensplacedinthe250mL~500mLnitrogenbottle,addalittlewatertowet,theaugendseedglassbeads,5mL~10mL,nitric-perchloricacidaftermixing,shakewell.Slowlyadd5mLor10mLsulfate,aftertreatingtheeasestopsfoaming,lowheat,slowlyheating(sugareasycharring),continuealongthewalladdednitric-perchloricacidmanipulatorcontrolmodeandprogrammablecontrollersintroduction2.1Selectdiscussionwithmanipulatorcontrol2.1.1classificationofcontrolrelaysanddiscreteelectroniccircuitcancontrololdindustrialequipment,butalsomorecommon.Mainlythesetworelativelycheapandyoucanmeettheold-fashioned,simple(orsimple)industrialequipment.Sohecanseethemnow,howeverthesetwocontrolmodes(relayanddiscreteelectroniccircuits)arethesefatalflaws:(1)cannotadapttothecomplexlogiccontrol,(2)onlyforthecurrentproject,thelackofcompatibilityand(3)notreformingthesystemwithequipmentimprovements.SpringforthedevelopmentofChina'smodernindustrialautomationtechnologythesubstantialincreaseinthelevelofindustrialautomation,completedtheperfectrelayofthecomputertoomuch.Intermsofcontrollingthecomputershowedhistwogreatadvantages:(1)eachofthehardwarecanbeinstalledononeormoremicroprocessors;(2)theofficialdesignerofthesoftwarewritingcontentcontrolisallabout.Nowinseveralwaysinthecontextofindustrialautomationcanoftenbeseeninthreeways:(1)ProgrammableLogicalController(referredtoasIPC);(2)DistributedControlSystem(DCSforshort),and(3)theProgrammableLogicalController(PLCforshort).2.1.2PLCandtheIPCandDCScontrastcontrast1,eachofthethreetechnologiesoforiginsanddevelopmentrequirementsforfastdataprocessingmakesitinventedthecomputer.Themenbroughtintermsofhardwarethere,usingahighlevelofstandardization,canusemorecompatibilitytools,isarichsoftwareresources,especiallytheneedforimmediacyinoperationalsystems.Sothecomputercaneffectivelycontrolisusedtocontrolandmeetitsspeed,onthevirtualmodel,real-timeandincomputationalrequirements.Distributedsystemstartedwithacontrolsystemforindustrialautomaticinstrumentusedtocontrol,whereasnowitissuccessfullydevelopedintoindustrialcontrolcomputerusedasacentralcollectionanddistributionsystemandtransitionofdistributedcontrolsysteminanaloguehandling,loopcontrol,hasbeguntoreflecttheuseofahugeadvantage.Thoughdistributedsystemhasgreatadvantagesinloopregulation,butonlyasameansofcontinuousprocesscontrol.OptimizationofPLCisthecorrespondingrelayneedswasborn,itsmainuseintheworkordercontrol,earlyprimaryisreplacedrelaythishulkingsystem,focusedontheswitchcontrollingtherunningorderoffunctions.Markedbythemicroprocessorintheearly1970ofthe20thcenturyemerged,micro-electronicstechnologyhasdevelopedrapidly,peoplesoonmicroelectronicsprocessingtechnologywillbeusedintheProgrammableLogicalController(thatis7\nManipulatorisnowusedasaindustrialrobotsinuse,thecontrolobjectivesoftenappearofteninindustrialautomation.Industrialautomationtechnologyhasgraduallymatured,asmatureatechnologylinehasbeenrapiddevelopmentinindustrialautomationasaseparatesubject.Manipulatorapplicationbegantofilterintowelding,logistics,mechanicalprocessing,andotherindustries.Especiallyathighorverylowtemperatures,fullofpoisonousgases,highradiationcase,robotinsimilarcircumstancesshowedgreatusealsobringsgreatconveniencetothestaff.Preciselybecauseofthisrobottogetpeople'sattentionbegantobeahighdegreeofdevelopment.Laborrates,workingconditions,laborintensiveaspectsofpromotingdevelopment.BothathomeandabroadtodevelopthePLC(programmablelogiccontroller)isinvariousspecialcircumstancesandunderspecialconditionssetformechanicaldevices.Nowturnedonthedevelopmentofthemicroelectronicsautomaticcontroltechnologyandtherapiddevelopmentofthetrains,thesuccessofPLChardwaresoftwareandsimulationcontrolwinbigandsuccessfuldevelopment,nowcontinuestodevelopasafactoryautomationstandards.Becauserobotsaregooddevelopmentofthetechnologymakesagoodoptimizationofproductivecapital,androbotshowsthisuniqueadvantages,suchas:hasgoodcompatibility,wideavailability,hardwareiscomplete,andprogrammingthatcanbemasteredinashorttime,sointhecontextofindustrialPLCapplicationsbecameubiquitous.Manipulatorinmanydevelopedcountryagricultureandindustryhasbeenapplied,suchastheuseofmechanicalharvestinglargeareasoffarmland,repeatedoperationsonthehigh-speedlinethatusesaroboticarm,andsoon.Today,thehighlevelofautomationcombinedwithrestrictionsonthemanipulatordevelopmentlevelisslightlylowerthantheinternational.ThedesignismainlyarmweldingmachinebyPLCAutomationcontrol.Thisofdesignletdesignersoninschoolbylearnofhasamustofconsolidation,understandhassomeusuallydidn'topportunitiesawarenessinworldrangewithinsomeleadinglevelofknowledgehashasmustawareness,hopedesignerscaninyihouofdesigninthecansuccessofusinginthisdesignintheproceedsofexperience1.2manipulatorinbothathomeandabroadofresearchprofileautomationmechanicalarmresearchbeganYu20thcenturymedium-term,afteryearswithwithcomputerandautomationtechnologyofdevelopment,MakesmechanicalarmontheGrandstageofindustrialautomationandshine,graduallybecameanindustrialevaluationstandards,anditsimportancecanbeseen.Noworiginalroboticarmspentmostofmassproductionanduseontheproductionline,whichisprogrammedroboticarm.Asthefirstgenerationofmanipulatorpositioncontrolsystemsmainfeatures,althoughnotbackseveralgenerationsthatcandetecttheexternalenvironment,butcanstillsuccessfullycompletelikewelding,painting,deliveryaswellasformaterialssimplemovements.Secondgenerationmechanicalarmsareequippedwithsensorsandmanipulatorshavetheenvironmentthereisacertainamountof"sense",whenthemechanicalarmistousetheprogramasabasis.Differenceisthattherobotbegand4)养护:找平层抹平、压实以后24h可浇水养护,一般养护期为7d,经干燥后铺设防水层。(4)抹水泥砂浆找平层(坡屋面):1)洒水湿润:抹找平层水泥砂浆前,应适当洒水湿润基层表面,主要是利于基层与找平层的结合,但不可洒水过量,以免影响找平层表面的干燥,防水层施工后窝住水气,使防水层产生空鼓。所以洒水达到基层和找平层能牢固结合为度。2)贴点标高、冲筋:根据坡度要求,拉线找玻,一般按l~2m贴点标高(贴灰饼),铺抹找平砂浆时,先按流水方向以间距l~2m冲筋,并设置找平层分格缝,宽度一般为20mm,并且将缝与保温层连通,分格缝最大间距为6m。3)铺装水泥砂浆:按分格块装灰、铺平,用刮扛靠冲筋条刮平,找坡后用木抹子槎平,铁抹子压光。待浮水沉失后,人踏上去有脚印但不下陷为度,再用铁抹子压第二遍即可交活。找平层水泥砂浆一般配合比为1∶3,拌合稠度控制在7cm。4)养护:找平层抹平、压实以后24h可浇水养护,一般养护期为7d,经干燥后铺设防水层。2.1.3成品保护(1)抹好的找平层上,推小车运输时,应先铺脚手板车道,以防止破坏找平层表面。(2)找平层施工完毕,末达到一定强度时不得上人踩踏。(3)雨水口、内排雨口施工过程中,应采取临时措施封口,防止杂物进入塔塞。2.2防水层施工2.2.1工艺流程基层清理→涂刷基层处理剂→铺贴卷材附加层→铺贴卷材→热熔封边→蓄水试验→做保护层(1)清理基层:施工前将验收合格的基层表面尘土、杂物清理干净。(2)涂刷基层处理剂:高聚物改性沥青防水卷材施工,按产品说明书配套使用,基层处理剂是将氯丁橡胶沥青胶粘剂加人工业汽油稀释,搅拌均匀,用长把滚刷均匀涂刷于基层表面上,常温经过4h后(以不粘脚为准),开始铺贴卷材。注意涂刷基层处理剂要均匀一致,切勿反复涂刷。(3)附加层施工:待基层处理剂干燥后,先对女儿墙、水落口、管根、檐口、阴阳角等细部先做附加层,在其中心200mm范围内,均匀涂刷lmm厚的胶粘剂,干后再粘结一层聚酯纤维无纺布,在其上再涂刷1mm厚的胶粘剂,干燥后形成一层无接缝和弹塑性的整体附加层。排汽道、排汽帽必须畅通,排汽道上的附加卷材每边宽度不小于250mm,必须单面点粘。排汽道、排汽帽的做法,.参见第3章第3.6.2施工。阴阳角圆弧半径R=50mm。铺贴在立面墙上的卷材高度不小于250mm。(4)铺贴卷材:卷材的层数、厚度应符合设计要求。铺贴方向应考虑屋面坡度及屋面是否受振动和历年主导风向等情况(必须从下风方向开始),坡度小于3%时,宜平行于屋脊铺贴,坡度在3%~15%时;平行或垂直于屋脊铺贴;当坡度大于15%toproducewhitesmoke,sotwice,cold.Coldsolutionmovesintothe50mLor100mLinthebottle,washednitrogenbottlewashsolutionintothevolumetricflask,cool,suchaswatertothescale,andmix.Sizing10mL1gasolutionofthespecimen,sulfate1mL.Getanddigestthesamplesthesameamountofnitricacidamixtureofperchloratewithsulfuricacid,bythesamemethodofreagentblank.12.1.2vegetable,fruit,weighing2500gor50.00gwashinahomogenatesamplesplacedina250mL~500mLnitrogenbottles,addingseedglassbeads,10mL~15mL,nitricacidamixtureofperchlorate,accordingto12.1.1"placeforamoment......"actionaccordingtolaw,butaconstantvolumeofsolutionaftereach10mL5Gsample,sulfate...12.1.4containingalcoholsexbeverageorcontainingcarbondioxidebeverage:draw10.00mLor20.00mLsample,placed250mL~500mLsetnitrogenbottleinthe,Addendgrainglassbeads,firstwithfireheatingremovedethanolorcarbondioxide,againadded5mL~1OmLnitricacid-perchloratemixedliquid,mixeduniformHou,followingby12.1.1since"placedmoments......"uplawoperation,butsetcapacityHouofsolutioneach10mLequivalentto2mLsample.12.1.5foodshighinsugarcontent:weighing5.00gor10.0gspecimensplacedinthe250mL~500mLnitrogenbottle,addalittlewatertowet,theaugendseedglassbeads,5mL~10mL,nitric-perchloricacidaftermixing,shakewell.Slowlyadd5mLor10mLsulfate,aftertreatingtheeasestopsfoaming,lowheat,slowlyheating(sugareasycharring),continuealongthewalladdednitric-perchloricacidmanipulatorcontrolmodeandprogrammablecontrollersintroduction2.1Selectdiscussionwithmanipulatorcontrol2.1.1classificationofcontrolrelaysanddiscreteelectroniccircuitcancontrololdindustrialequipment,butalsomorecommon.Mainlythesetworelativelycheapandyoucanmeettheold-fashioned,simple(orsimple)industrialequipment.Sohecanseethemnow,howeverthesetwocontrolmodes(relayanddiscreteelectroniccircuits)arethesefatalflaws:(1)cannotadapttothecomplexlogiccontrol,(2)onlyforthecurrentproject,thelackofcompatibilityand(3)notreformingthesystemwithequipmentimprovements.SpringforthedevelopmentofChina'smodernindustrialautomationtechnologythesubstantialincreaseinthelevelofindustrialautomation,completedtheperfectrelayofthecomputertoomuch.Intermsofcontrollingthecomputershowedhistwogreatadvantages:(1)eachofthehardwarecanbeinstalledononeormoremicroprocessors;(2)theofficialdesignerofthesoftwarewritingcontentcontrolisallabout.Nowinseveralwaysinthecontextofindustrialautomationcanoftenbeseeninthreeways:(1)ProgrammableLogicalController(referredtoasIPC);(2)DistributedControlSystem(DCSforshort),and(3)theProgrammableLogicalController(PLCforshort).2.1.2PLCandtheIPCandDCScontrastcontrast1,eachofthethreetechnologiesoforiginsanddevelopmentrequirementsforfastdataprocessingmakesitinventedthecomputer.Themenbroughtintermsofhardwarethere,usingahighlevelofstandardization,canusemorecompatibilitytools,isarichsoftwareresources,especiallytheneedforimmediacyinoperationalsystems.Sothecomputercaneffectivelycontrolisusedtocontrolandmeetitsspeed,onthevirtualmodel,real-timeandincomputationalrequirements.Distributedsystemstartedwithacontrolsystemforindustrialautomaticinstrumentusedtocontrol,whereasnowitissuccessfullydevelopedintoindustrialcontrolcomputerusedasacentralcollectionanddistributionsystemandtransitionofdistributedcontrolsysteminanaloguehandling,loopcontrol,hasbeguntoreflecttheuseofahugeadvantage.Thoughdistributedsystemhasgreatadvantagesinloopregulation,butonlyasameansofcontinuousprocesscontrol.OptimizationofPLCisthecorrespondingrelayneedswasborn,itsmainuseintheworkordercontrol,earlyprimaryisreplacedrelaythishulkingsystem,focusedontheswitchcontrollingtherunningorderoffunctions.Markedbythemicroprocessorintheearly1970ofthe20thcenturyemerged,micro-electronicstechnologyhasdevelopedrapidly,peoplesoonmicroelectronicsprocessingtechnologywillbeusedintheProgrammableLogicalController(thatis7\nManipulatorisnowusedasaindustrialrobotsinuse,thecontrolobjectivesoftenappearofteninindustrialautomation.Industrialautomationtechnologyhasgraduallymatured,asmatureatechnologylinehasbeenrapiddevelopmentinindustrialautomationasaseparatesubject.Manipulatorapplicationbegantofilterintowelding,logistics,mechanicalprocessing,andotherindustries.Especiallyathighorverylowtemperatures,fullofpoisonousgases,highradiationcase,robotinsimilarcircumstancesshowedgreatusealsobringsgreatconveniencetothestaff.Preciselybecauseofthisrobottogetpeople'sattentionbegantobeahighdegreeofdevelopment.Laborrates,workingconditions,laborintensiveaspectsofpromotingdevelopment.BothathomeandabroadtodevelopthePLC(programmablelogiccontroller)isinvariousspecialcircumstancesandunderspecialconditionssetformechanicaldevices.Nowturnedonthedevelopmentofthemicroelectronicsautomaticcontroltechnologyandtherapiddevelopmentofthetrains,thesuccessofPLChardwaresoftwareandsimulationcontrolwinbigandsuccessfuldevelopment,nowcontinuestodevelopasafactoryautomationstandards.Becauserobotsaregooddevelopmentofthetechnologymakesagoodoptimizationofproductivecapital,androbotshowsthisuniqueadvantages,suchas:hasgoodcompatibility,wideavailability,hardwareiscomplete,andprogrammingthatcanbemasteredinashorttime,sointhecontextofindustrialPLCapplicationsbecameubiquitous.Manipulatorinmanydevelopedcountryagricultureandindustryhasbeenapplied,suchastheuseofmechanicalharvestinglargeareasoffarmland,repeatedoperationsonthehigh-speedlinethatusesaroboticarm,andsoon.Today,thehighlevelofautomationcombinedwithrestrictionsonthemanipulatordevelopmentlevelisslightlylowerthantheinternational.ThedesignismainlyarmweldingmachinebyPLCAutomationcontrol.Thisofdesignletdesignersoninschoolbylearnofhasamustofconsolidation,understandhassomeusuallydidn'topportunitiesawarenessinworldrangewithinsomeleadinglevelofknowledgehashasmustawareness,hopedesignerscaninyihouofdesigninthecansuccessofusinginthisdesignintheproceedsofexperience1.2manipulatorinbothathomeandabroadofresearchprofileautomationmechanicalarmresearchbeganYu20thcenturymedium-term,afteryearswithwithcomputerandautomationtechnologyofdevelopment,MakesmechanicalarmontheGrandstageofindustrialautomationandshine,graduallybecameanindustrialevaluationstandards,anditsimportancecanbeseen.Noworiginalroboticarmspentmostofmassproductionanduseontheproductionline,whichisprogrammedroboticarm.Asthefirstgenerationofmanipulatorpositioncontrolsystemsmainfeatures,althoughnotbackseveralgenerationsthatcandetecttheexternalenvironment,butcanstillsuccessfullycompletelikewelding,painting,deliveryaswellasformaterialssimplemovements.Secondgenerationmechanicalarmsareequippedwithsensorsandmanipulatorshavetheenvironmentthereisacertainamountof"sense",whenthemechanicalarmistousetheprogramasabasis.Differenceisthattherobotbegand或屋面受振动,卷材应垂直于屋脊铺贴。多层铺设时上下层接缝应错开不小于250mm。将改性沥青防水卷材剪成相应尺寸,用原卷心卷好备用;铺贴时随放卷随用火焰加热器加热基层和卷材的交界处,火焰加热器距加热面300mm左右,经往返均匀加热,至卷材表面发光亮黑色,即卷材的材面熔化时,将卷材向前滚铺、粘贴,搭接部位应满粘牢固,搭接宽度满粘法长边为80mm,短边为100mm。铺第二层卷材时,上下层卷材不得互相垂直铺贴。(5)防水保护层施工:上人屋面按设计要求做各种刚性防水层屋面保护层(细石混凝土、水泥砂浆、贴地砖等)。保护层施工前,必须做油纸或玻纤布隔离层;刚性保护层的分格缝留置应符合设计要求,设计无要求者,水泥砂浆保护层的分格面积为1m2,缝宽、深均为10mm,并嵌填沥青砂浆;块材保护层分格面积不宜大于100m2,缝宽不宜小于20mm,细石混凝土保护层分格面积不大于36m2。3.2.2成品保护(1)已铺贴好的卷材防水层,应采取措施进行保护,严禁在防水层上进行施工作业和运输,并应及时做防水层的保护层。(2)穿过屋面、墙面防水层处的管位,防水层施工完工后不得再变更和损坏。(3)屋面变形缝、水落口等处,施工中应进行临时塞堵和挡盖,以防落杂物,屋面及时清理,施工完成后将临时堵塞、挡盖物及时清除,保证管内畅通。(4)屋面施工时不得污染墙面、檐口侧面及其他已施工完的成品。2.3保温层施工2.3.1工艺流程基层清理→弹线找坡→管根固定→保温层铺设→抹找平层。(1)基层清理:预制或现浇混凝土结构层表面,应将杂物、灰尘清理干净。(2)弹线找坡:按设计坡度及流水方向,找出屋面坡度走向,确定保温层的厚度范围。(3)管根固定:穿结构的管根在保温层施工前,应用细石混凝土塞堵密实。(4)保温层铺设(板块状保温层):1)干铺板块状保温层:直接铺设防水涂料层上,分层铺设时上下两层板块缝应错开,表面两块相邻的板边厚度应一致,一般在块状保温层上用松散料湿作找坡。2)粘结铺设板块状保温层:板块状保温材料用粘结材料平粘在屋面基层上,一般用水泥、石灰混合砂浆;聚苯板材料应用沥青胶结料粘贴。2.3.2成品保护(1)防水层施工前应将基层表面的砂、土、硬杂物等清扫干净,防止降低防水效果。(2)在在已铺好的板状保温层上不得施工,应采取必要措施,保证保温层不受损坏。(3)保温层施工完后,应及时铺抹水泥砂浆找平层,以保证保温效果。2.4细石混凝土保护层toproducewhitesmoke,sotwice,cold.Coldsolutionmovesintothe50mLor100mLinthebottle,washednitrogenbottlewashsolutionintothevolumetricflask,cool,suchaswatertothescale,andmix.Sizing10mL1gasolutionofthespecimen,sulfate1mL.Getanddigestthesamplesthesameamountofnitricacidamixtureofperchloratewithsulfuricacid,bythesamemethodofreagentblank.12.1.2vegetable,fruit,weighing2500gor50.00gwashinahomogenatesamplesplacedina250mL~500mLnitrogenbottles,addingseedglassbeads,10mL~15mL,nitricacidamixtureofperchlorate,accordingto12.1.1"placeforamoment......"actionaccordingtolaw,butaconstantvolumeofsolutionaftereach10mL5Gsample,sulfate...12.1.4containingalcoholsexbeverageorcontainingcarbondioxidebeverage:draw10.00mLor20.00mLsample,placed250mL~500mLsetnitrogenbottleinthe,Addendgrainglassbeads,firstwithfireheatingremovedethanolorcarbondioxide,againadded5mL~1OmLnitricacid-perchloratemixedliquid,mixeduniformHou,followingby12.1.1since"placedmoments......"uplawoperation,butsetcapacityHouofsolutioneach10mLequivalentto2mLsample.12.1.5foodshighinsugarcontent:weighing5.00gor10.0gspecimensplacedinthe250mL~500mLnitrogenbottle,addalittlewatertowet,theaugendseedglassbeads,5mL~10mL,nitric-perchloricacidaftermixing,shakewell.Slowlyadd5mLor10mLsulfate,aftertreatingtheeasestopsfoaming,lowheat,slowlyheating(sugareasycharring),continuealongthewalladdednitric-perchloricacidmanipulatorcontrolmodeandprogrammablecontrollersintroduction2.1Selectdiscussionwithmanipulatorcontrol2.1.1classificationofcontrolrelaysanddiscreteelectroniccircuitcancontrololdindustrialequipment,butalsomorecommon.Mainlythesetworelativelycheapandyoucanmeettheold-fashioned,simple(orsimple)industrialequipment.Sohecanseethemnow,howeverthesetwocontrolmodes(relayanddiscreteelectroniccircuits)arethesefatalflaws:(1)cannotadapttothecomplexlogiccontrol,(2)onlyforthecurrentproject,thelackofcompatibilityand(3)notreformingthesystemwithequipmentimprovements.SpringforthedevelopmentofChina'smodernindustrialautomationtechnologythesubstantialincreaseinthelevelofindustrialautomation,completedtheperfectrelayofthecomputertoomuch.Intermsofcontrollingthecomputershowedhistwogreatadvantages:(1)eachofthehardwarecanbeinstalledononeormoremicroprocessors;(2)theofficialdesignerofthesoftwarewritingcontentcontrolisallabout.Nowinseveralwaysinthecontextofindustrialautomationcanoftenbeseeninthreeways:(1)ProgrammableLogicalController(referredtoasIPC);(2)DistributedControlSystem(DCSforshort),and(3)theProgrammableLogicalController(PLCforshort).2.1.2PLCandtheIPCandDCScontrastcontrast1,eachofthethreetechnologiesoforiginsanddevelopmentrequirementsforfastdataprocessingmakesitinventedthecomputer.Themenbroughtintermsofhardwarethere,usingahighlevelofstandardization,canusemorecompatibilitytools,isarichsoftwareresources,especiallytheneedforimmediacyinoperationalsystems.Sothecomputercaneffectivelycontrolisusedtocontrolandmeetitsspeed,onthevirtualmodel,real-timeandincomputationalrequirements.Distributedsystemstartedwithacontrolsystemforindustrialautomaticinstrumentusedtocontrol,whereasnowitissuccessfullydevelopedintoindustrialcontrolcomputerusedasacentralcollectionanddistributionsystemandtransitionofdistributedcontrolsysteminanaloguehandling,loopcontrol,hasbeguntoreflecttheuseofahugeadvantage.Thoughdistributedsystemhasgreatadvantagesinloopregulation,butonlyasameansofcontinuousprocesscontrol.OptimizationofPLCisthecorrespondingrelayneedswasborn,itsmainuseintheworkordercontrol,earlyprimaryisreplacedrelaythishulkingsystem,focusedontheswitchcontrollingtherunningorderoffunctions.Markedbythemicroprocessorintheearly1970ofthe20thcenturyemerged,micro-electronicstechnologyhasdevelopedrapidly,peoplesoonmicroelectronicsprocessingtechnologywillbeusedintheProgrammableLogicalController(thatis7\nManipulatorisnowusedasaindustrialrobotsinuse,thecontrolobjectivesoftenappearofteninindustrialautomation.Industrialautomationtechnologyhasgraduallymatured,asmatureatechnologylinehasbeenrapiddevelopmentinindustrialautomationasaseparatesubject.Manipulatorapplicationbegantofilterintowelding,logistics,mechanicalprocessing,andotherindustries.Especiallyathighorverylowtemperatures,fullofpoisonousgases,highradiationcase,robotinsimilarcircumstancesshowedgreatusealsobringsgreatconveniencetothestaff.Preciselybecauseofthisrobottogetpeople'sattentionbegantobeahighdegreeofdevelopment.Laborrates,workingconditions,laborintensiveaspectsofpromotingdevelopment.BothathomeandabroadtodevelopthePLC(programmablelogiccontroller)isinvariousspecialcircumstancesandunderspecialconditionssetformechanicaldevices.Nowturnedonthedevelopmentofthemicroelectronicsautomaticcontroltechnologyandtherapiddevelopmentofthetrains,thesuccessofPLChardwaresoftwareandsimulationcontrolwinbigandsuccessfuldevelopment,nowcontinuestodevelopasafactoryautomationstandards.Becauserobotsaregooddevelopmentofthetechnologymakesagoodoptimizationofproductivecapital,androbotshowsthisuniqueadvantages,suchas:hasgoodcompatibility,wideavailability,hardwareiscomplete,andprogrammingthatcanbemasteredinashorttime,sointhecontextofindustrialPLCapplicationsbecameubiquitous.Manipulatorinmanydevelopedcountryagricultureandindustryhasbeenapplied,suchastheuseofmechanicalharvestinglargeareasoffarmland,repeatedoperationsonthehigh-speedlinethatusesaroboticarm,andsoon.Today,thehighlevelofautomationcombinedwithrestrictionsonthemanipulatordevelopmentlevelisslightlylowerthantheinternational.ThedesignismainlyarmweldingmachinebyPLCAutomationcontrol.Thisofdesignletdesignersoninschoolbylearnofhasamustofconsolidation,understandhassomeusuallydidn'topportunitiesawarenessinworldrangewithinsomeleadinglevelofknowledgehashasmustawareness,hopedesignerscaninyihouofdesigninthecansuccessofusinginthisdesignintheproceedsofexperience1.2manipulatorinbothathomeandabroadofresearchprofileautomationmechanicalarmresearchbeganYu20thcenturymedium-term,afteryearswithwithcomputerandautomationtechnologyofdevelopment,MakesmechanicalarmontheGrandstageofindustrialautomationandshine,graduallybecameanindustrialevaluationstandards,anditsimportancecanbeseen.Noworiginalroboticarmspentmostofmassproductionanduseontheproductionline,whichisprogrammedroboticarm.Asthefirstgenerationofmanipulatorpositioncontrolsystemsmainfeatures,althoughnotbackseveralgenerationsthatcandetecttheexternalenvironment,butcanstillsuccessfullycompletelikewelding,painting,deliveryaswellasformaterialssimplemovements.Secondgenerationmechanicalarmsareequippedwithsensorsandmanipulatorshavetheenvironmentthereisacertainamountof"sense",whenthemechanicalarmistousetheprogramasabasis.Differenceisthattherobotbegand保护层为40厚C20细石混凝土,配φ4@150X150钢筋网,平面内间距<4000设纵横分隔,缝宽20。2.4.1、钢筋网铺设:按设计要求绑扎φ4b@200双向钢筋网,钢筋网应注意放在保护层的上部,用垫块垫好,以达到控制收缩裂缝的作用;钢筋网应在分格缝处断开。钢筋网要求横平竖直,间距均匀。2.4.2、细石混凝土施工按实验室配合比拌和好细石混凝土,按先远后近、先低后高的原则逐格进行施工;浇筑时按分格板高度摊开刮平,用平板振动器十字交叉来回振实,直至混凝土表面泛浆后,用木抹子将表面抹平压实,在混凝土初凝以前,再进行第二次压浆抹光;在女儿墙的根部、以及高出细石混凝土的根部均做成圆弧或钝角;混凝土初凝后,及时取出分格缝隔板,用铁抹子抹光,并及时修补分格缝缺损部分,做到平直整齐,待混凝土终凝前进行第三次压光;混凝土终凝后立即进行浇水养护,养护时间一般不少于7天;细石混凝土表面平整度不得大于5mm。2.4.3、天沟及泛水根据水落口位置做好坡度线,用细石砼做成圆弧,略低于保护层约40~50mm,并坡向水落口,注意在做天沟时,应预先用30mm的木条与保护层隔开,以后用密封材料嵌密实;水落口周围应作成略低的凹槽,范围为水落口周围500范围,与水落口接茬平顺,坡度不得低于5%,以利于泄水。墙面立面上的卷材泛水收头应塞入预留槽内,用金属压条钉压固定,最大间距不应大于900mm,并用密封材料嵌填封严,外侧用1:2.5水泥砂浆填实,粉出10mm的斜角滴水,并保持滴水线水平、顺直。2.4.4、灌分格缝混凝土浇水养护完毕后,用水将分格缝冲洗干净并达到干燥,所有分格缝相互贯通,清理干净,缺边损角处修补好后打扫干净;在分格缝上均匀涂刷冷底子油后,向其内灌嵌硅酮密封膏,应满灌缝内,并应一次性灌满。现场补充交底:交底人签字(班组长):日期:接收交底人签字(工人):日期:toproducewhitesmoke,sotwice,cold.Coldsolutionmovesintothe50mLor100mLinthebottle,washednitrogenbottlewashsolutionintothevolumetricflask,cool,suchaswatertothescale,andmix.Sizing10mL1gasolutionofthespecimen,sulfate1mL.Getanddigestthesamplesthesameamountofnitricacidamixtureofperchloratewithsulfuricacid,bythesamemethodofreagentblank.12.1.2vegetable,fruit,weighing2500gor50.00gwashinahomogenatesamplesplacedina250mL~500mLnitrogenbottles,addingseedglassbeads,10mL~15mL,nitricacidamixtureofperchlorate,accordingto12.1.1"placeforamoment......"actionaccordingtolaw,butaconstantvolumeofsolutionaftereach10mL5Gsample,sulfate...12.1.4containingalcoholsexbeverageorcontainingcarbondioxidebeverage:draw10.00mLor20.00mLsample,placed250mL~500mLsetnitrogenbottleinthe,Addendgrainglassbeads,firstwithfireheatingremovedethanolorcarbondioxide,againadded5mL~1OmLnitricacid-perchloratemixedliquid,mixeduniformHou,followingby12.1.1since"placedmoments......"uplawoperation,butsetcapacityHouofsolutioneach10mLequivalentto2mLsample.12.1.5foodshighinsugarcontent:weighing5.00gor10.0gspecimensplacedinthe250mL~500mLnitrogenbottle,addalittlewatertowet,theaugendseedglassbeads,5mL~10mL,nitric-perchloricacidaftermixing,shakewell.Slowlyadd5mLor10mLsulfate,aftertreatingtheeasestopsfoaming,lowheat,slowlyheating(sugareasycharring),continuealongthewalladdednitric-perchloricacidmanipulatorcontrolmodeandprogrammablecontrollersintroduction2.1Selectdiscussionwithmanipulatorcontrol2.1.1classificationofcontrolrelaysanddiscreteelectroniccircuitcancontrololdindustrialequipment,butalsomorecommon.Mainlythesetworelativelycheapandyoucanmeettheold-fashioned,simple(orsimple)industrialequipment.Sohecanseethemnow,howeverthesetwocontrolmodes(relayanddiscreteelectroniccircuits)arethesefatalflaws:(1)cannotadapttothecomplexlogiccontrol,(2)onlyforthecurrentproject,thelackofcompatibilityand(3)notreformingthesystemwithequipmentimprovements.SpringforthedevelopmentofChina'smodernindustrialautomationtechnologythesubstantialincreaseinthelevelofindustrialautomation,completedtheperfectrelayofthecomputertoomuch.Intermsofcontrollingthecomputershowedhistwogreatadvantages:(1)eachofthehardwarecanbeinstalledononeormoremicroprocessors;(2)theofficialdesignerofthesoftwarewritingcontentcontrolisallabout.Nowinseveralwaysinthecontextofindustrialautomationcanoftenbeseeninthreeways:(1)ProgrammableLogicalController(referredtoasIPC);(2)DistributedControlSystem(DCSforshort),and(3)theProgrammableLogicalController(PLCforshort).2.1.2PLCandtheIPCandDCScontrastcontrast1,eachofthethreetechnologiesoforiginsanddevelopmentrequirementsforfastdataprocessingmakesitinventedthecomputer.Themenbroughtintermsofhardwarethere,usingahighlevelofstandardization,canusemorecompatibilitytools,isarichsoftwareresources,especiallytheneedforimmediacyinoperationalsystems.Sothecomputercaneffectivelycontrolisusedtocontrolandmeetitsspeed,onthevirtualmodel,real-timeandincomputationalrequirements.Distributedsystemstartedwithacontrolsystemforindustrialautomaticinstrumentusedtocontrol,whereasnowitissuccessfullydevelopedintoindustrialcontrolcomputerusedasacentralcollectionanddistributionsystemandtransitionofdistributedcontrolsysteminanaloguehandling,loopcontrol,hasbeguntoreflecttheuseofahugeadvantage.Thoughdistributedsystemhasgreatadvantagesinloopregulation,butonlyasameansofcontinuousprocesscontrol.OptimizationofPLCisthecorrespondingrelayneedswasborn,itsmainuseintheworkordercontrol,earlyprimaryisreplacedrelaythishulkingsystem,focusedontheswitchcontrollingtherunningorderoffunctions.Markedbythemicroprocessorintheearly1970ofthe20thcenturyemerged,micro-electronicstechnologyhasdevelopedrapidly,peoplesoonmicroelectronicsprocessingtechnologywillbeusedintheProgrammableLogicalController(thatis7\nManipulatorisnowusedasaindustrialrobotsinuse,thecontrolobjectivesoftenappearofteninindustrialautomation.Industrialautomationtechnologyhasgraduallymatured,asmatureatechnologylinehasbeenrapiddevelopmentinindustrialautomationasaseparatesubject.Manipulatorapplicationbegantofilterintowelding,logistics,mechanicalprocessing,andotherindustries.Especiallyathighorverylowtemperatures,fullofpoisonousgases,highradiationcase,robotinsimilarcircumstancesshowedgreatusealsobringsgreatconveniencetothestaff.Preciselybecauseofthisrobottogetpeople'sattentionbegantobeahighdegreeofdevelopment.Laborrates,workingconditions,laborintensiveaspectsofpromotingdevelopment.BothathomeandabroadtodevelopthePLC(programmablelogiccontroller)isinvariousspecialcircumstancesandunderspecialconditionssetformechanicaldevices.Nowturnedonthedevelopmentofthemicroelectronicsautomaticcontroltechnologyandtherapiddevelopmentofthetrains,thesuccessofPLChardwaresoftwareandsimulationcontrolwinbigandsuccessfuldevelopment,nowcontinuestodevelopasafactoryautomationstandards.Becauserobotsaregooddevelopmentofthetechnologymakesagoodoptimizationofproductivecapital,androbotshowsthisuniqueadvantages,suchas:hasgoodcompatibility,wideavailability,hardwareiscomplete,andprogrammingthatcanbemasteredinashorttime,sointhecontextofindustrialPLCapplicationsbecameubiquitous.Manipulatorinmanydevelopedcountryagricultureandindustryhasbeenapplied,suchastheuseofmechanicalharvestinglargeareasoffarmland,repeatedoperationsonthehigh-speedlinethatusesaroboticarm,andsoon.Today,thehighlevelofautomationcombinedwithrestrictionsonthemanipulatordevelopmentlevelisslightlylowerthantheinternational.ThedesignismainlyarmweldingmachinebyPLCAutomationcontrol.Thisofdesignletdesignersoninschoolbylearnofhasamustofconsolidation,understandhassomeusuallydidn'topportunitiesawarenessinworldrangewithinsomeleadinglevelofknowledgehashasmustawareness,hopedesignerscaninyihouofdesigninthecansuccessofusinginthisdesignintheproceedsofexperience1.2manipulatorinbothathomeandabroadofresearchprofileautomationmechanicalarmresearchbeganYu20thcenturymedium-term,afteryearswithwithcomputerandautomationtechnologyofdevelopment,MakesmechanicalarmontheGrandstageofindustrialautomationandshine,graduallybecameanindustrialevaluationstandards,anditsimportancecanbeseen.Noworiginalroboticarmspentmostofmassproductionanduseontheproductionline,whichisprogrammedroboticarm.Asthefirstgenerationofmanipulatorpositioncontrolsystemsmainfeatures,althoughnotbackseveralgenerationsthatcandetecttheexternalenvironment,butcanstillsuccessfullycompletelikewelding,painting,deliveryaswellasformaterialssimplemovements.Secondgenerationmechanicalarmsareequippedwithsensorsandmanipulatorshavetheenvironmentthereisacertainamountof"sense",whenthemechanicalarmistousetheprogramasabasis.Differenceisthattherobotbegandtoproducewhitesmoke,sotwice,cold.Coldsolutionmovesintothe50mLor100mLinthebottle,washednitrogenbottlewashsolutionintothevolumetricflask,cool,suchaswatertothescale,andmix.Sizing10mL1gasolutionofthespecimen,sulfate1mL.Getanddigestthesamplesthesameamountofnitricacidamixtureofperchloratewithsulfuricacid,bythesamemethodofreagentblank.12.1.2vegetable,fruit,weighing2500gor50.00gwashinahomogenatesamplesplacedina250mL~500mLnitrogenbottles,addingseedglassbeads,10mL~15mL,nitricacidamixtureofperchlorate,accordingto12.1.1"placeforamoment......"actionaccordingtolaw,butaconstantvolumeofsolutionaftereach10mL5Gsample,sulfate...12.1.4containingalcoholsexbeverageorcontainingcarbondioxidebeverage:draw10.00mLor20.00mLsample,placed250mL~500mLsetnitrogenbottleinthe,Addendgrainglassbeads,firstwithfireheatingremovedethanolorcarbondioxide,againadded5mL~1OmLnitricacid-perchloratemixedliquid,mixeduniformHou,followingby12.1.1since"placedmoments......"uplawoperation,butsetcapacityHouofsolutioneach10mLequivalentto2mLsample.12.1.5foodshighinsugarcontent:weighing5.00gor10.0gspecimensplacedinthe250mL~500mLnitrogenbottle,addalittlewatertowet,theaugendseedglassbeads,5mL~10mL,nitric-perchloricacidaftermixing,shakewell.Slowlyadd5mLor10mLsulfate,aftertreatingtheeasestopsfoaming,lowheat,slowlyheating(sugareasycharring),continuealongthewalladdednitric-perchloricacidmanipulatorcontrolmodeandprogrammablecontrollersintroduction2.1Selectdiscussionwithmanipulatorcontrol2.1.1classificationofcontrolrelaysanddiscreteelectroniccircuitcancontrololdindustrialequipment,butalsomorecommon.Mainlythesetworelativelycheapandyoucanmeettheold-fashioned,simple(orsimple)industrialequipment.Sohecanseethemnow,howeverthesetwocontrolmodes(relayanddiscreteelectroniccircuits)arethesefatalflaws:(1)cannotadapttothecomplexlogiccontrol,(2)onlyforthecurrentproject,thelackofcompatibilityand(3)notreformingthesystemwithequipmentimprovements.SpringforthedevelopmentofChina'smodernindustrialautomationtechnologythesubstantialincreaseinthelevelofindustrialautomation,completedtheperfectrelayofthecomputertoomuch.Intermsofcontrollingthecomputershowedhistwogreatadvantages:(1)eachofthehardwarecanbeinstalledononeormoremicroprocessors;(2)theofficialdesignerofthesoftwarewritingcontentcontrolisallabout.Nowinseveralwaysinthecontextofindustrialautomationcanoftenbeseeninthreeways:(1)ProgrammableLogicalController(referredtoasIPC);(2)DistributedControlSystem(DCSforshort),and(3)theProgrammableLogicalController(PLCforshort).2.1.2PLCandtheIPCandDCScontrastcontrast1,eachofthethreetechnologiesoforiginsanddevelopmentrequirementsforfastdataprocessingmakesitinventedthecomputer.Themenbroughtintermsofhardwarethere,usingahighlevelofstandardization,canusemorecompatibilitytools,isarichsoftwareresources,especiallytheneedforimmediacyinoperationalsystems.Sothecomputercaneffectivelycontrolisusedtocontrolandmeetitsspeed,onthevirtualmodel,real-timeandincomputationalrequirements.Distributedsystemstartedwithacontrolsystemforindustrialautomaticinstrumentusedtocontrol,whereasnowitissuccessfullydevelopedintoindustrialcontrolcomputerusedasacentralcollectionanddistributionsystemandtransitionofdistributedcontrolsysteminanaloguehandling,loopcontrol,hasbeguntoreflecttheuseofahugeadvantage.Thoughdistributedsystemhasgreatadvantagesinloopregulation,butonlyasameansofcontinuousprocesscontrol.OptimizationofPLCisthecorrespondingrelayneedswasborn,itsmainuseintheworkordercontrol,earlyprimaryisreplacedrelaythishulkingsystem,focusedontheswitchcontrollingtherunningorderoffunctions.Markedbythemicroprocessorintheearly1970ofthe20thcenturyemerged,micro-electronicstechnologyhasdevelopedrapidly,peoplesoonmicroelectronicsprocessingtechnologywillbeusedintheProgrammableLogicalController(thatis7