

- 3.66 MB
- 2022-04-22 11:40:39 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
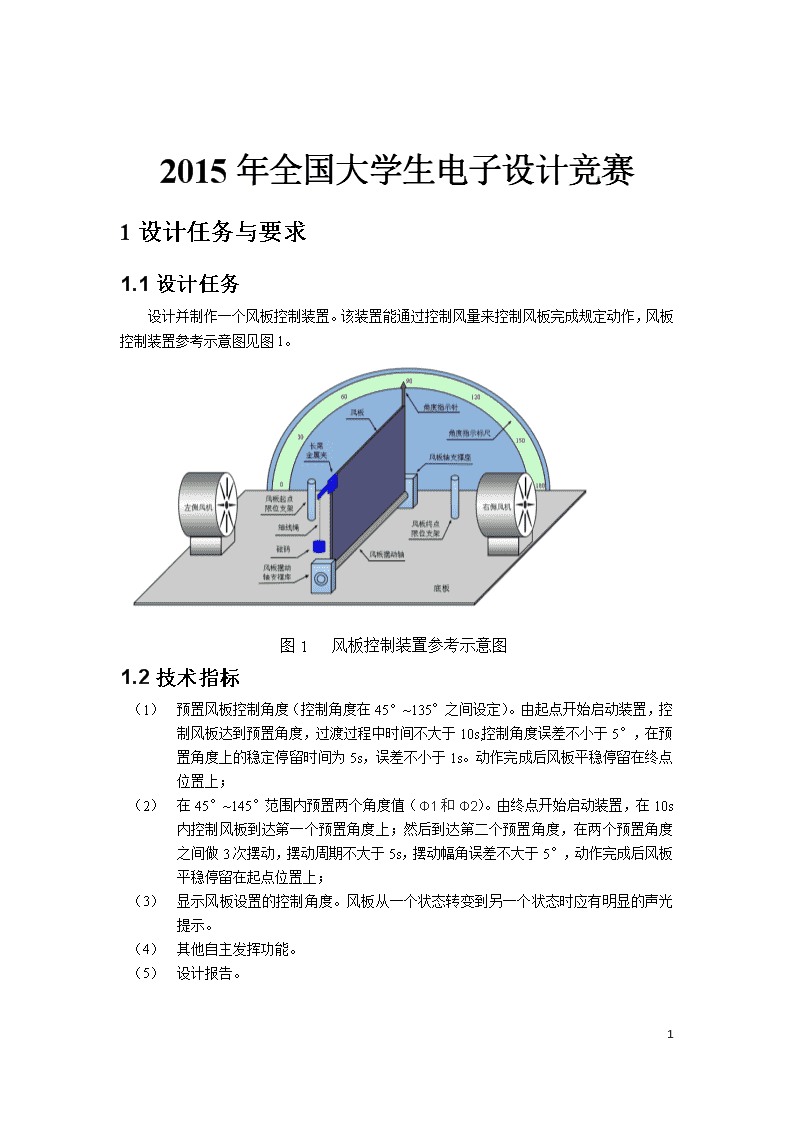
'2015年全国大学生电子设计竞赛1设计任务与要求1.1设计任务设计并制作一个风板控制装置。该装置能通过控制风量来控制风板完成规定动作,风板控制装置参考示意图见图1。图1风板控制装置参考示意图1.2技术指标(1)预置风板控制角度(控制角度在45°~135°之间设定)。由起点开始启动装置,控制风板达到预置角度,过渡过程中时间不大于10s,控制角度误差不小于5°,在预置角度上的稳定停留时间为5s,误差不小于1s。动作完成后风板平稳停留在终点位置上;(2)在45°~145°范围内预置两个角度值(Φ1和Φ2)。由终点开始启动装置,在10s内控制风板到达第一个预置角度上;然后到达第二个预置角度,在两个预置角度之间做3次摆动,摆动周期不大于5s,摆动幅角误差不大于5°,动作完成后风板平稳停留在起点位置上;(3)显示风板设置的控制角度。风板从一个状态转变到另一个状态时应有明显的声光提示。(4)其他自主发挥功能。(5)设计报告。12
1.3题目评析根据设计要求,对题目评析如下:本题的重点:①设计合适的机械结构,选择适当的风机。②传感器和转动轴灵敏度的选择。③编写合适的算法使风板停在预置角度。本题的难点:①既要保证风板摆动稳定,又要保证不超时。②减小角度误差。③来回摆动不稳定,难以精确控制角度。2方案比较与选择2.1主控MCU选择方案一:采用ARM作为系统的核心控制芯片。ARM芯片,运算速度快,内存大,功耗低,功能强大,但是其成本高,操作指令复杂,用在该系统中还会使ARM大量资源闲置,无疑是大材小用了。方案二:采用STC公司生产的STC12C5A60S2单片机作为系统的核心控制芯片。STC12C5A60S2单片机具有很多优点:速度快,是传统51单片机的8~12倍;功耗低、抗干扰性能强;指令代码完全兼容传统的8051,程序编写简单、价格低廉,缺点是不能再线调试,外部IO口不太丰富。对比两个方案,综合考虑系统需要,方案二能满足系统控制要求。2.2角度测量选择方案一:角度测量采用专用角度传感器芯片,由单片机进行数据运算,通过晶体管驱动电机转动。但电路比较复杂,程序比较麻烦。方案二:角度测量采用旋转电位器,通过转动的阻值变化读取电位器的电阻值,送往AD进行数据运算,得到相应的角度。对于以上两种方案,分析系统要求以及可供选择的现有元件,选取方案二。2.3电源选择方案一:采用线性直流稳压电源。线性稳压电源制作简单,输出稳定,但价格较高。方案二:采用开关直流稳压电源。开关电源功率大,效率高,性价比相对较高。
综合考虑,方案二可以满足系统要求。2.4单片机选择方案一:89C52是80C51增强型单片机版本,集成了时钟输出和向上或向下计数器等多种功能,适用于类似的马达控制,但其不能进行A/D转换,没有PID的计算功能,控制能力强,但精确度不高。12
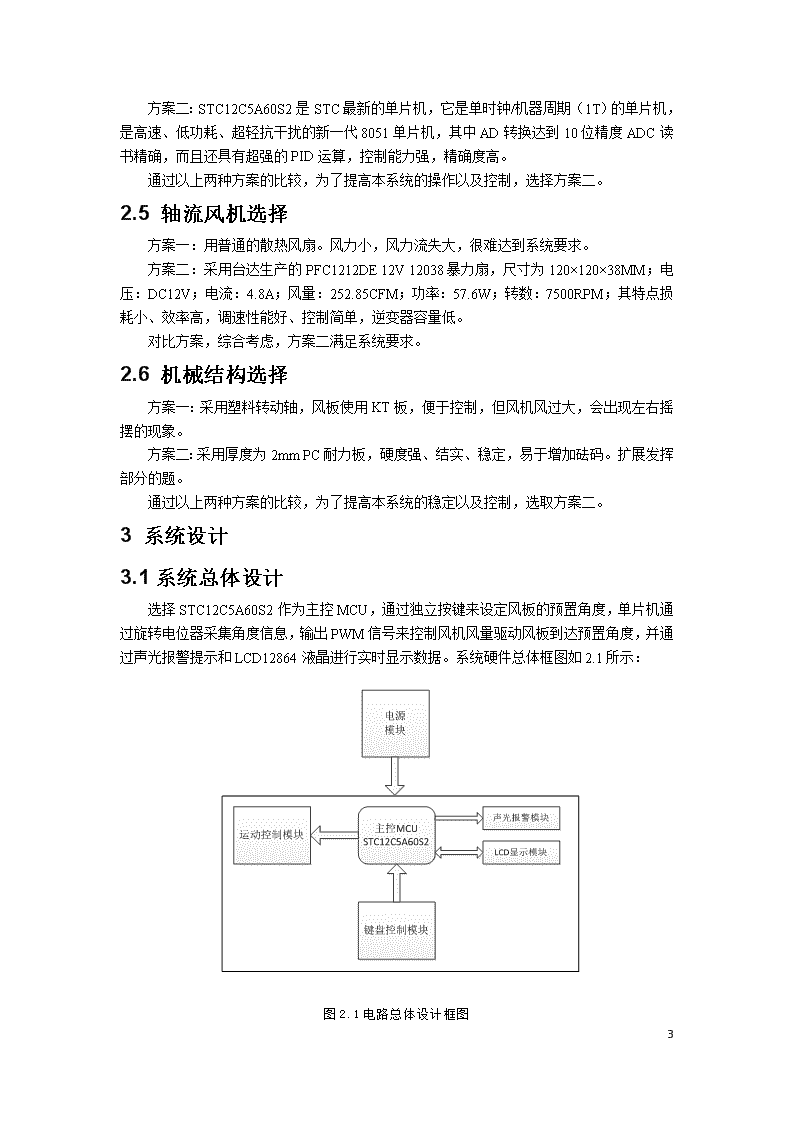
方案二:STC12C5A60S2是STC最新的单片机,它是单时钟/机器周期(1T)的单片机,是高速、低功耗、超轻抗干扰的新一代8051单片机,其中AD转换达到10位精度ADC读书精确,而且还具有超强的PID运算,控制能力强,精确度高。通过以上两种方案的比较,为了提高本系统的操作以及控制,选择方案二。2.5轴流风机选择方案一:用普通的散热风扇。风力小,风力流失大,很难达到系统要求。方案二:采用台达生产的PFC1212DE12V12038暴力扇,尺寸为120×120×38MM;电压:DC12V;电流:4.8A;风量:252.85CFM;功率:57.6W;转数:7500RPM;其特点损耗小、效率高,调速性能好、控制简单,逆变器容量低。对比方案,综合考虑,方案二满足系统要求。2.6机械结构选择方案一:采用塑料转动轴,风板使用KT板,便于控制,但风机风过大,会出现左右摇摆的现象。方案二:采用厚度为2mmPC耐力板,硬度强、结实、稳定,易于增加砝码。扩展发挥部分的题。通过以上两种方案的比较,为了提高本系统的稳定以及控制,选取方案二。3系统设计3.1系统总体设计选择STC12C5A60S2作为主控MCU,通过独立按键来设定风板的预置角度,单片机通过旋转电位器采集角度信息,输出PWM信号来控制风机风量驱动风板到达预置角度,并通过声光报警提示和LCD12864液晶进行实时显示数据。系统硬件总体框图如2.1所示:图2.1电路总体设计框图12
3.2单元模块设计3.2.1风机驱动模块风机的控制是由单片机输出的PWM波进行调速,通过三极管进行驱动风机,由两组驱动电路分别驱动左右两个风机。风机控制电路如图2.2所示图2.2风扇控制电路3.2.2电源模块电源模块用于为系统中各个部分提供稳定可靠的电压,电源电路是一个设计中最关键的部分,各个模块要想正常工作都需要提供合适的电源。相应的电源模块的原理设计如图2.3所示。图2.3电源模块电路12
3.2.3键盘模块按键控制模块与单片机的连接如图2.4所示,AD1-AD8连接单片机的I/O口P0。按键功能分布如下:lS1——给定角度(+);lS2——给定角度(-);lS3——功能切换;lS4——lS5——启动;lS6——预留1;图2.4按键输入部分电路图3.2.4声光报警模块声光报警模块由发光二极管和蜂鸣器组成。当传感器检测到金属物体并完成定位后,变会产生声光报警,声光报警电路如图2.5所示。发光二极管的阴极连一电阻接到单片机的一个I/O口,阳极连接+5V电源,未完成定位时,I/O口输出高电平,发光二极管处于灭状态;完成定位时,I/O口输出低电平,二极管发光。蜂鸣器的一端连接+5V电源,另一端连接三极管的集电极。三极管的基极连一电阻接到单片机的I/O口,集电极接地,晶体管用于给蜂鸣器提供足够大的电流。未完成定位时,I/O口输出低电平,晶体管未导通,蜂鸣器不响;完成定位时,I/O口输出高电平,晶体管导通,蜂鸣器响。12
图2.5声光报警电路3.2.5LCD显示模块LCD-12864介绍:LCD-12864是一种图形点阵液晶显示模组。它用T6963C作为控制器,KS0086作为驱动的240(列)*128(行)的全点阵液晶显示。具有与INTER8080时序相适配的MPU接口功能,并有专门的指令集,可完成文本显示和图形显示的功能设置。LCD12864特性:•工作电压为+5V±10%•显示内容:240×128点,可显示15个(/行)X8共120个(16×16点阵)的中文字符•内部有固定字模库共128种(8X8)字符和2K字节的自定义字模容量。•共有13条操作指令测量相关数据由旋转电位器检测返回单片机运算后并显示,其接口电路如图2.6所示。图2.6LCD-12864与单片机连接图12
4系软件设计图4.1系统软件流程图5系统测试5.1测试所需仪器与用途(1)测量所需仪器秒表、游标卡尺、数字示波器、数字万用表(2)仪器用途秒表来记录测量时间是否满足要求,游标卡尺来测量转动轴与地板的距离,数字示波器来观测输出PWM波是否正常,数字万用表来检测硬件电路中的元器件是否存在虚焊或焊接不正确,以及检测电路各部分电压、电流值是否正确。5.2测试方法和数据5.2.1测试方法设定感应的起始位置,启动X、Y方向的步进电机,每隔10ms进行LDC-1000传感器感应值检测,传感器与金属物体位置变化由远及近的不同所引起的测量值的变化,分别对应不同的位置测量值进行观察并记录LCD显示数据并计算误差误差。经过多次的测量找到到达所测金属物体的检测范围,根据发送到步进电机的脉冲个数计算出金属物体的位置。12
5.2.2测试数据情况一:预置起始角度为45°,终止角度为137°,过渡时间10s。测量次数12345起始角度(度)46°48°50°52°45°终止角度(度)140°137°142°130°138°过渡时间(s)8111297表5.1风板控制角度与时间测量值情况二:预置起始角度为45°,终止角度为137°,预置角度1为60°,预置角度2为120°,过渡时间10s。测量次数12345预置角度15658626059预置角度2118120121119125过渡时间(s)991098表5.2风板控制角度与时间测量值情况三:加入10g重物,预置起始角度为47°,终止角度为132°,过渡时间15s。测量次数12345起始角度(度)47°43°49°44°47°终止角度(度)133°129°130°135°132°过渡时间(s)1315151311表5.3传感器测量4cm圆环的感应值情况四:加入10g重物,预置起始角度为47°,终止角度为132°,预置角度1为80°,预置角度2为125°,过渡时间15s。测量次数12345预置角度18279768480预置角度2124128125120129过渡时间(s)141516121412
综上所示,风板控制角度与时间测量值的变化可知,对于风板的摆动角度来说,不加重物比加入重物更好的控制风板的来回摆动,精度相对于比较高。风板运行检测程序测试结果:1、不管风板在那边,系统启动后,都能使其到达预置角度。2、风板每次都能到达预置角度,误差和时间都满足设计要求。6总结本设计以STC12C5A60S2单片机为核心部件,采用旋转电位器对风板角度进行测量,编写软件控制算法对系统进行优化,分模块实现赛题要求。在系统设计过程中,充分利用STC12C5A60S2单片机的优势功能,力求以方便灵活的软件编程简化复杂难调的硬件电路,满足系统设计要求。操作简单,使用方便,并很好的完成竞赛的要求。参赛期间队员团结合作,分工明确,充分发挥了团队力量,使竞赛圆满完成。12
参考文献[1]何立民:单片机应用系统设计,北京航空航天大学出版社,2004[2]吴金戌、沈庆阳、郭庭吉:8051单片机实践与应用,清华大学出版社,2004[3]郭天祥.《新概念51单片机C语言教程》.北京:电子工业出版社[4]张家生.《电机原理与拖动基础》[M].北京:北京邮电大学出版社,2006.[5]马淑华,王凤文,张美金.《单片机原理与接口技术》[M].北京:北京邮电大学出版社,2007.[6]顾德英,张健,马淑华.《计算机控制技术》[M].北京:北京邮电大学出版社,2006.[7]秦刚,陈忠孝,陈超波《计算机控制系统》北京:中国电力出版社,2013.[8]华成英,童诗白.《模拟电子技术基础》[M].北京:高等教育出版社,200812
附录Ⅰ系统原理图12
附录Ⅱ控制部分实物图12'
您可能关注的文档
- 2015创业文化节策划书.doc
- 2015十周年晚会策划.doc
- 2015史上最全大学生2015元旦晚会策划书.docx
- 2015寒假社会实践“情满夕阳”队策划案.doc
- 2015年“周黑鸭杯”湖北省大学生营销策划.doc
- 2015年“周黑鸭杯”湖北省大学生营销策划挑战赛.doc
- 2015年“周黑鸭杯”湖北省大学生营销策划挑战赛1.doc
- 2015年个人挑战赛策划.doc
- 2015年促销计划方案策划方案.doc
- 2015年员工趣味运动会策划书.doc
- 2015年奔腾汽车4S店营销策划全案.doc
- 2015年新生辩论赛 策划.doc
- 2015年暑期社会实践策划书.doc
- 2015年湘南学院心灵驿站素质拓展策划书.doc
- 2015年电信飞YOUNG营销策划方案.doc
- 2015年第一届最强大脑总策划.doc
- 2015年第十五届中国大连啤酒展销会策划方案.doc
- 2015年职业发展协会第四届职场先锋大赛完整策划.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明