

- 1.59 MB
- 2022-04-22 11:41:35 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
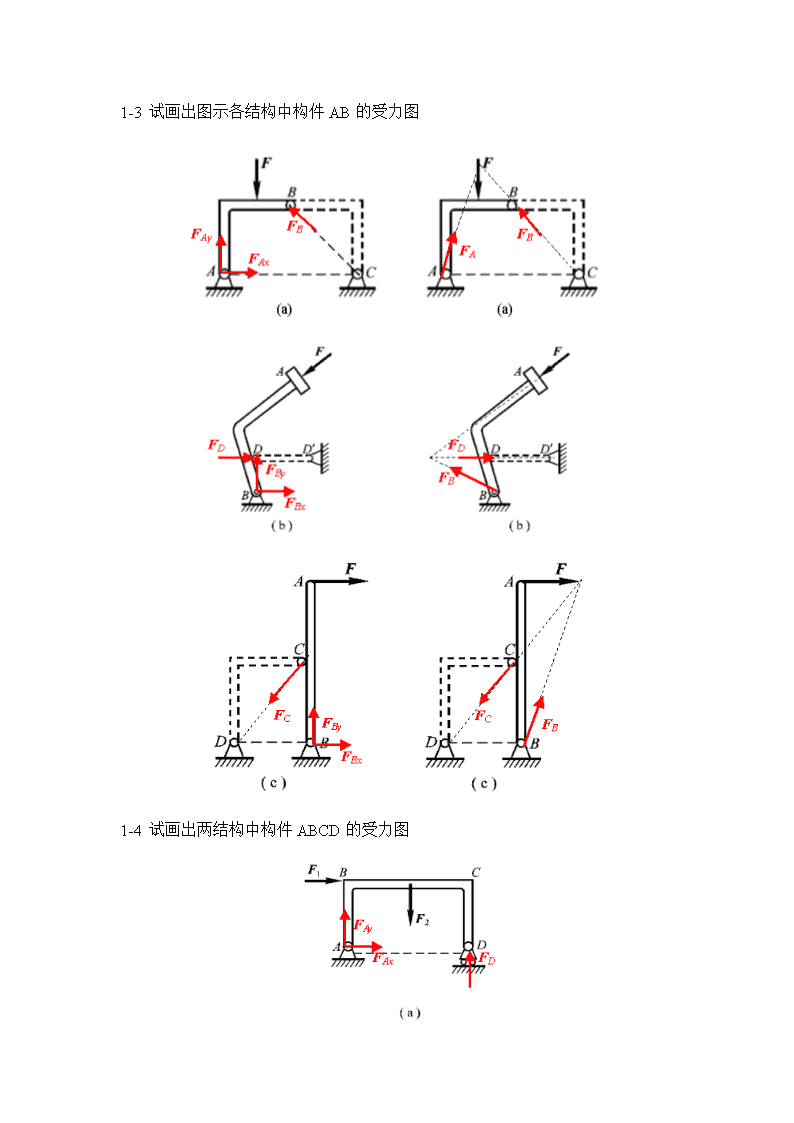
'1-3试画出图示各结构中构件AB的受力图1-4试画出两结构中构件ABCD的受力图
1-5试画出图a和b所示刚体系整体各个构件的受力图1-5a1-5b
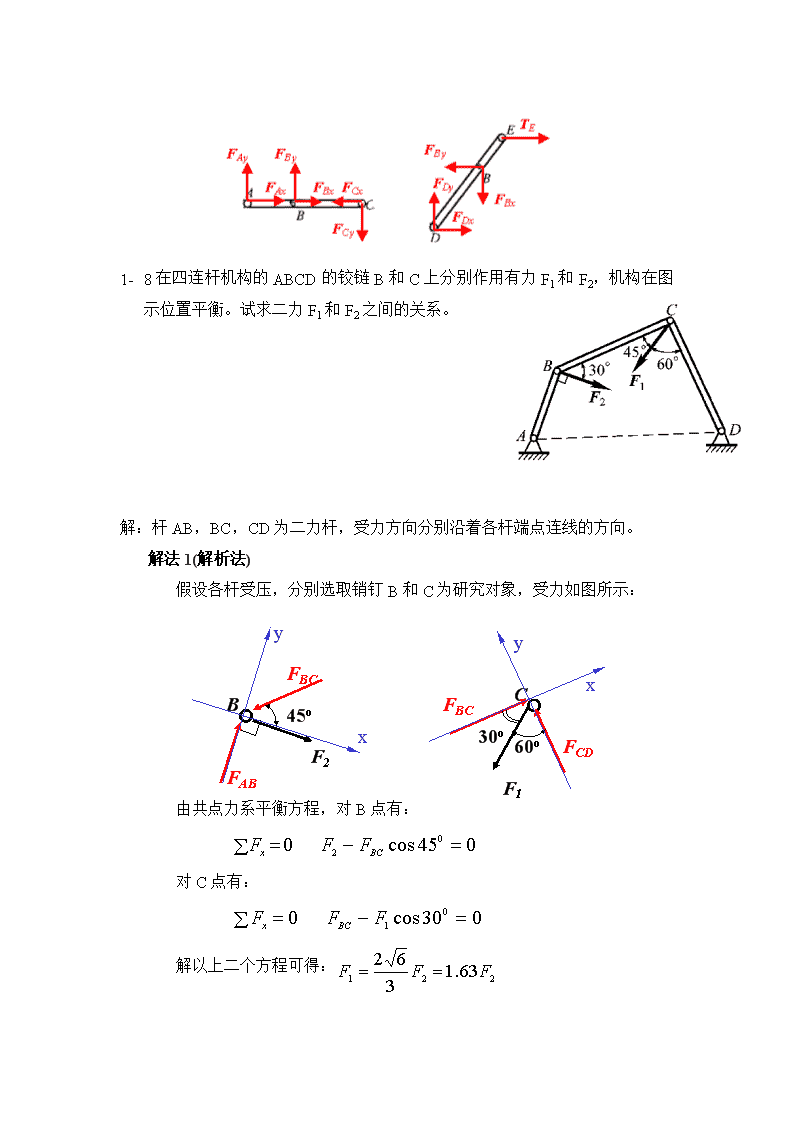
1-8在四连杆机构的ABCD的铰链B和C上分别作用有力F1和F2,机构在图示位置平衡。试求二力F1和F2之间的关系。解:杆AB,BC,CD为二力杆,受力方向分别沿着各杆端点连线的方向。解法1(解析法)假设各杆受压,分别选取销钉B和C为研究对象,受力如图所示:F2FBCFABB45oyxFBCFCDC60oF130oxy由共点力系平衡方程,对B点有:对C点有:解以上二个方程可得:
解法2(几何法)FBCFCD60oF130oF2FBCFAB45o分别选取销钉B和C为研究对象,根据汇交力系平衡条件,作用在B和C点上的力构成封闭的力多边形,如图所示。对B点由几何关系可知:对C点由几何关系可知:解以上两式可得:2-3在图示结构中,二曲杆重不计,曲杆AB上作用有主动力偶M。试求A和C点处的约束力。解:BC为二力杆(受力如图所示),故曲杆AB在B点处受到约束力的方向沿BC两点连线的方向。曲杆AB受到主动力偶M的作用,A点和B点处的约束力必须构成一个力偶才能使曲杆AB保持平衡。AB受力如图所示,由力偶系作用下刚体的平衡方程有(设力偶逆时针为正):其中:。对BC杆有:A,C两点约束力的方向如图所示。2-4
解:机构中AB杆为二力杆,点A,B出的约束力方向即可确定。由力偶系作用下刚体的平衡条件,点O,C处的约束力方向也可确定,各杆的受力如图所示。对BC杆有:对AB杆有:对OA杆有:求解以上三式可得:,,方向如图所示。//2-6求最后简化结果。解:2-6a坐标如图所示,各力可表示为:,,先将力系向A点简化得(红色的):,方向如左图所示。由于,可进一步简化为一个不过A点的力(绿色的),主矢不变,其作用线距A点的距离,位置如左图所示。2-6b同理如右图所示,可将该力系简化为一个不过A点的力(绿色的),主矢为:
其作用线距A点的距离,位置如右图所示。简化中心的选取不同,是否影响最后的简化结果?是2-13解:整个结构处于平衡状态。选择滑轮为研究对象,受力如图,列平衡方程(坐标一般以水平向右为x轴正向,竖直向上为y轴正向,力偶以逆时针为正):选梁AB为研究对象,受力如图,列平衡方程:求解以上五个方程,可得五个未知量分别为:(与图示方向相反)(与图示方向相同)(逆时针方向)2-18
解:选AB杆为研究对象,受力如图所示,列平衡方程:求解以上两个方程即可求得两个未知量,其中:未知量不一定是力。以下几题可看一看!2-27解:选杆AB为研究对象,受力如下图所示。列平衡方程:(运用力对轴之矩!)
由和可求出。平衡方程可用来校核。思考题:对该刚体独立的平衡方程数目是几个?2-29解:杆1,2,3,4,5,6均为二力杆,受力方向沿两端点连线方向,假设各杆均受压。选板ABCD为研究对象,受力如图所示,该力系为空间任意力系。采用六矩式平衡方程:(受拉)(受压)(受压)(受拉)本题也可以采用空间任意力系标准式平衡方程,但求解代数方程组非常麻烦。类似本题的情况采用六矩式方程比较方便,适当的选择六根轴保证一个方程求解一个未知量,避免求解联立方程。
2-31力偶矩解:取棒料为研究对象,受力如图所示。列平衡方程:补充方程:五个方程,五个未知量,可得方程:解得。当时有:即棒料左侧脱离V型槽,与提议不符,故摩擦系数。2-33解:当时,取杆AB为研究对象,受力如图所示。列平衡方程:
附加方程:四个方程,四个未知量,可求得。2-35解:选棱柱体为研究对象,受力如图所示。假设棱柱边长为a,重为P,列平衡方程:如果棱柱不滑动,则满足补充方程时处于极限平衡状态。解以上五个方程,可求解五个未知量,其中:(1)当物体不翻倒时,则:(2)即斜面倾角必须同时满足(1)式和(2)式,棱柱才能保持平衡。
FCxFCyFBxFBy3-10解:假设杆AB,DE长为2a。取整体为研究对象,受力如右图所示,列平衡方程:取杆DE为研究对象,受力如图所示,列平衡方程:取杆AB为研究对象,受力如图所示,列平衡方程:(与假设方向相反)(与假设方向相反)(与假设方向相反)3-12FCxFCyFD解:取整体为研究对象,受力如图所示,列平衡方程:
取杆AB为研究对象,受力如图所示,列平衡方程:杆AB为二力杆,假设其受压。取杆AB和AD构成的组合体为研究对象,受力如图所示,列平衡方程:解得,命题得证。注意:销钉A和C联接三个物体。FAFB3-14解:取整体为研究对象,由于平衡条件可知该力系对任一点之矩为零,因此有:即必过A点,同理可得必过B点。也就是和是大小相等,方向相反且共线的一对力,如图所示。取板AC为研究对象,受力如图所示,列平衡方程:
解得:(方向如图所示)3-20解:支撑杆1,2,3为二力杆,假设各杆均受压。选梁BC为研究对象,受力如图所示。其中均布载荷可以向梁的中点简化为一个集中力,大小为2qa,作用在BC杆中点。列平衡方程:(受压)DF3F2F1xy选支撑杆销钉D为研究对象,受力如右图所示。列平衡方程:(受压)(受拉)选梁AB和BC为研究对象,受力如图所示。列平衡方程:(与假设方向相反)(逆时针)
FAxFAyFBxFBy3-21解:选整体为研究对象,受力如右图所示。列平衡方程:(1)由题可知杆DG为二力杆,选GE为研究对象,作用于其上的力汇交于点G,受力如图所示,画出力的三角形,由几何关系可得:。取CEB为研究对象,受力如图所示。列平衡方程:代入公式(1)可得:3-24解:取杆AB为研究对象,设杆重为P,受力如图所示。列平衡方程:
取圆柱C为研究对象,受力如图所示。列平衡方程:注意:由于绳子也拴在销钉上,因此以整体为研究对象求得的A处的约束力不是杆AB对销钉的作用力。3-27解:取整体为研究对象,设杆长为L,重为P,受力如图所示。列平衡方程:(1)取杆BC为研究对象,受力如图所示。列平衡方程:(2)FAxFAyFNFsPP补充方程:,将(1)式和(2)式代入有:,即。3-29(…………………………)证明:(1)不计圆柱重量法1:取圆柱为研究对象,圆柱在C点和D点分别受到法向约束力和摩擦力的作用,分别以全约束力来表示,如图所示。如圆柱不被挤出而处于平衡状态,则等值,反向,共线。由几何关系可知,
与接触点C,D处法线方向的夹角都是,因此只要接触面的摩擦角大于,不论F多大,圆柱不会挤出,而处于自锁状态。FNDFSDoFAxFAy法2(解析法):首先取整体为研究对象,受力如图所示。列平衡方程:再取杆AB为研究对象,受力如图所示。列平衡方程:取圆柱为研究对象,受力如图所示。假设圆柱半径为R,列平衡方程:
由补充方程:,可得如果:则不论F多大,圆柱都不被挤出,而处于自锁状态。证明:(2)圆柱重量P时取圆柱为研究对象,此时作用在圆柱上的力有重力P,C点和D点处的全约束力。如果圆柱保持平衡,则三力必汇交于D点(如图所示)。全约束力与C点处法线方向的夹角仍为,因此如果圆柱自锁在C点必须满足:(1)该结果与不计圆柱重量时相同。只满足(1)式时C点无相对滑动,但在D点有可能滑动(圆柱作纯滚动)。再选杆AB为研究对象,对A点取矩可得,由几何关系可得:(2)法1(几何法):PφFRDFRC圆柱保持平衡,则作用在其上的三个力构成封闭得力三角形,如图所示。由几何关系可知:
将(2)式代入可得:因此如果圆柱自锁在D点必须满足:(3)即当同时满足(1)式和(3)式时,圆柱自锁,命题得证。法2(解析法):取圆柱为研究对象,受力如图所示,列平衡方程:解得:,代入补充方程:,可得如果圆柱自锁在D点必须满足:(3)即当同时满足(1)式和(3)式时,圆柱自锁,命题得证。3-30解:取整体为研究对象,受力如图所示,列平衡方程:由题可知,杆AC为二力杆。作用在杆BC上的力有主动力,以及B和C处的约束力和,由三力平衡汇交,可确定约束力和
的方向如图所示,其中:,杆AC受压。取轮A为研究对象,受力如图所示,设的作用线与水平面交于F点,列平衡方程:取轮B为研究对象,受力如图所示,设的作用线与水平面交于G点,列平衡方程:解以上六个方程,可得:,,,若结构保持平衡,则必须同时满足:,,,
即:,因此平衡时的最大值,此时:,3-35解:由图可见杆桁架结构中杆CF,FG,EH为零力杆。用剖面SS将该结构分为两部分,取上面部分为研究对象,受力如图所示,列平衡方程:(受拉)(受拉)(受压)3-38解:假设各杆均受压。取三角形BCG为研究对象,受力如图所示。列平衡方程:(受压)
取节点C为研究对象,受力如图所示。列平衡方程:其中:,解以上两个方程可得:(受压)3-40解:取整体为研究对象,受力如图所示。列平衡方程:ABC345FAyFAxFBCSS用截面S-S将桁架结构分为两部分,假设各杆件受拉,取右边部分为研究对象,受力如图所示。列平衡方程:(受拉)(受拉)
4-1解:1.选定由杆OA,O1C,DE组成的系统为研究对象,该系统具有理想约束。作用在系统上的主动力为。2.该系统的位置可通过杆OA与水平方向的夹角θ完全确定,有一个自由度。选参数θ为广义坐标。3.在图示位置,不破坏约束的前提下,假定杆OA有一个微小的转角δθ,相应的各点的虚位移如下:,,,,代入可得:4.由虚位移原理有:对任意有:,物体所受的挤压力的方向竖直向下。4-4解:4a1.选杆AB为研究对象,该系统具有理想约束。设杆重为P,作用在杆上的主动力为重力。2.该系统的位置可通过杆AB与z轴的夹角θ完全确定,有一个自由度。选参数θ为广义坐标。由几何关系可知:杆的质心坐标可表示为:
3.在平衡位置,不破坏约束的前提下,假定杆AB逆时针旋转一个微小的角度δθ,则质心C的虚位移:4.由虚位移原理有:对任意有:即杆AB平衡时:。解:4b1.选杆AB为研究对象,该系统具有理想约束。设杆重为P,作用在杆上的主动力为重力。2.该系统的位置可通过杆AB与z轴的夹角θ完全确定,有一个自由度。选参数θ为广义坐标。由几何关系可知:杆的质心坐标可表示为:
3.在平衡位置,不破坏约束的前提下,假定杆AB顺时针旋转一个微小的角度δθ,则质心C的虚位移:4.由虚位移原理有:对任意有:即平衡时角满足:。4-5解:1.选整个系统为研究对象,此系统包含弹簧。设弹簧力,且,将弹簧力视为主动力。此时作用在系统上的主动力有,以及重力。2.该系统只有一个自由度,选定为广义坐标。由几何关系可知:3.在平衡位置,不破坏约束的前提下,假定有一个微小的虚位移δθ,则质心的虚位移为:弹簧的长度,在微小虚位移δθ下:
4.由虚位移原理有:其中,代入上式整理可得:由于,对任意可得平衡时弹簧刚度系数为:4-6解:解除A端的约束,代之以,并将其视为主动力,此外系统还受到主动力的作用。系统有三个自由度,选定A点的位移和梁AC的转角为广义坐标。1.在不破坏约束的前提下给定一组虚位移,如图所示。由虚位移原理有:对任意可得:2.在不破坏约束的前提下给定一组虚位移,如下图所示。由虚位移原理有:(1)
由几何关系可得各点的虚位移如下:代入(1)式:对任意可得:,方向如图所示。3.在不破坏约束的前提下给定一组虚位移,如上图所示。由虚位移原理有:(2)有几何关系可得各点的虚位移如下:代入(2)式:对任意可得:,逆时针方向。4-7
解:将均布载荷简化为作用在CD中点的集中载荷,大小为。1.求支座B处的约束力解除B点处的约束,代之以力,并将其视为主动力,系统还受到主动力的作用,如图所示。在不破坏约束的前提下,杆AC不动,梁CDB只能绕C点转动。系统有一个自由度,选转角为广义坐标。给定虚位移,由虚位移原理有:(1)各点的虚位移如下:代入(1)式整理可得:对任意可得:,方向如图所示。2.求固定端A处的约束力解除A端的约束,代之以,并将其视为主动力,系统还受到主动力的作用。系统有三个自由度,选定A点的位移和梁AC的转角为广义坐标。
2a.求在不破坏约束的前提下给定一组虚位移,此时整个结构平移,如上图所示。由虚位移原理有:(2)各点的虚位移如下:代入(2)式整理可得:对任意可得:,方向如图所示。2b.求在不破坏约束的前提下给定一组虚位移
,此时梁AC向上平移,梁CDB绕D点转动,如上图所示。由虚位移原理有:(3)各点的虚位移如下:代入(3)式整理可得:对任意可得:,方向如图所示。2c.求在不破坏约束的前提下给定一组虚位移,此时梁AC绕A点转动,梁CDB平移,如上图所示。由虚位移原理有:(4)各点的虚位移如下:代入(4)式整理可得:对任意可得:,顺时针方向。
4-8解:假设各杆受拉,杆长均为a。1.求杆1受力去掉杆1,代之以力,系统有一个自由度,选AK与水平方向的夹角为广义坐标,如上图所示。在不破坏约束的条件下给定一组虚位移,此时三角形ADK形状不变,绕A点转动,因此有,且:滑动支座B处只允许水平方向的位移,而杆BK上K点虚位移沿铅垂方向,故B点不动。三角形BEK绕B点旋转,且:对刚性杆CD和杆CE,由于,因此。由虚位移原理有:代入各点的虚位移整理可得:对任意可得:(受压)。2.求杆2受力去掉杆2,代之以力,系统有一个自由度,选BK与水平方向的夹角
为广义坐标,如上图所示。在不破坏约束的条件下给定一组虚位移,杆AK绕A点转动,因此有,且:同理可知B点不动,三角形BEK绕B点旋转,且:杆AD绕A点转动,由刚性杆DE上点E的虚位移可确定D点位移方向如图所示,且:同理可知。由虚位移原理有:代入各点的虚位移整理可得:对任意可得:(受压)。3.求杆3受力去掉杆3,代之以力,系统有一个自由度,选AK与水平方向的夹角为广义坐标,如上图所示。在不破坏约束的条件下给定一组虚位移,三角形ADK绕A点转动,,且:同理可知B点不动,,且:由虚位移原理有:
代入各点的虚位移整理可得:对任意可得:(受拉)。θ4-12铅垂力F为常力解:F大小和方向不变,常力也是有势力。取杆和弹簧构成的系统为研究对象。该系统为保守系统,有一个自由度,选为广义坐标,如图所示。取为零势能位置,则系统在任意位置的势能为:由平衡条件可得:有:和即:和也就是:和两个平衡位置。为判断平衡的稳定性,取势能V的二阶导数:当时,,即时是不稳定平衡。
当时,由上式可知:1.当且时,即是稳定平衡位置;2.当且时,即是不稳定平衡位置。OxyhCθθβ4-15解:取半径为r的半圆柱为研究对象,圆心为C。半圆柱作纯滚动,有一个自由度,取两个半圆心连线与y轴夹角为广义坐标。作用在半圆柱上的主动力为重力,系统为保守系统,如图所示,其中。由于半圆柱作纯滚动,有:(1)取坐标原点为零势能位置,则半圆柱在任意位置的势能为:
代入(1)式有:由平衡条件可得为平衡位置。势能V的二阶导数:由上式可得当,是稳定的。'
您可能关注的文档
- 《现代汉语》黄伯荣课后答案.doc
- 《现代汉语通论》(邵敬敏版)所有课后答案大全.doc
- 《现代汽车与驾驶技术》复习题一(附答案).doc
- 《现代西班牙语第一册》讲解及答案.doc
- 《现代通信技术》课后答案.pdf
- 《班主任家庭教育专业化课程》结业考试试题和答案.docx
- 《理论力学》动力学典型习题+答案.doc
- 《理论力学》课后习题解答(赫桐生,高教版).doc
- 《理论力学》课后习题解答(赫桐生_高教版).doc
- 《理论力学习题答案》【上】.pdf
- 《理论力学习题答案》【中】.pdf
- 《生产计划与控制》习题集答案.doc
- 《生物化学》王镜岩(第三版)课后习题解答.doc
- 《生物化学》第三版课后习题答案详解上册.doc
- 《生物化学》第三版课后习题答案详解上册[1].doc
- 《生物化学》课后习题详细解答.pdf
- 《生物化学学习指南习题与解答改》.doc
- 《生物化学笔记》习题答案 魏保生 第1版.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明