

- 1.19 MB
- 2022-04-22 11:18:37 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'课后答案网www.hackshp.cnREFERENCEANSWERforEXERCISEBOOKof《MechanismsandMachineTheory》khdaw.comTRGofMachineryTheoryandDesignCollegeofMechanicalEngineeringFuzhouUniversity2003khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
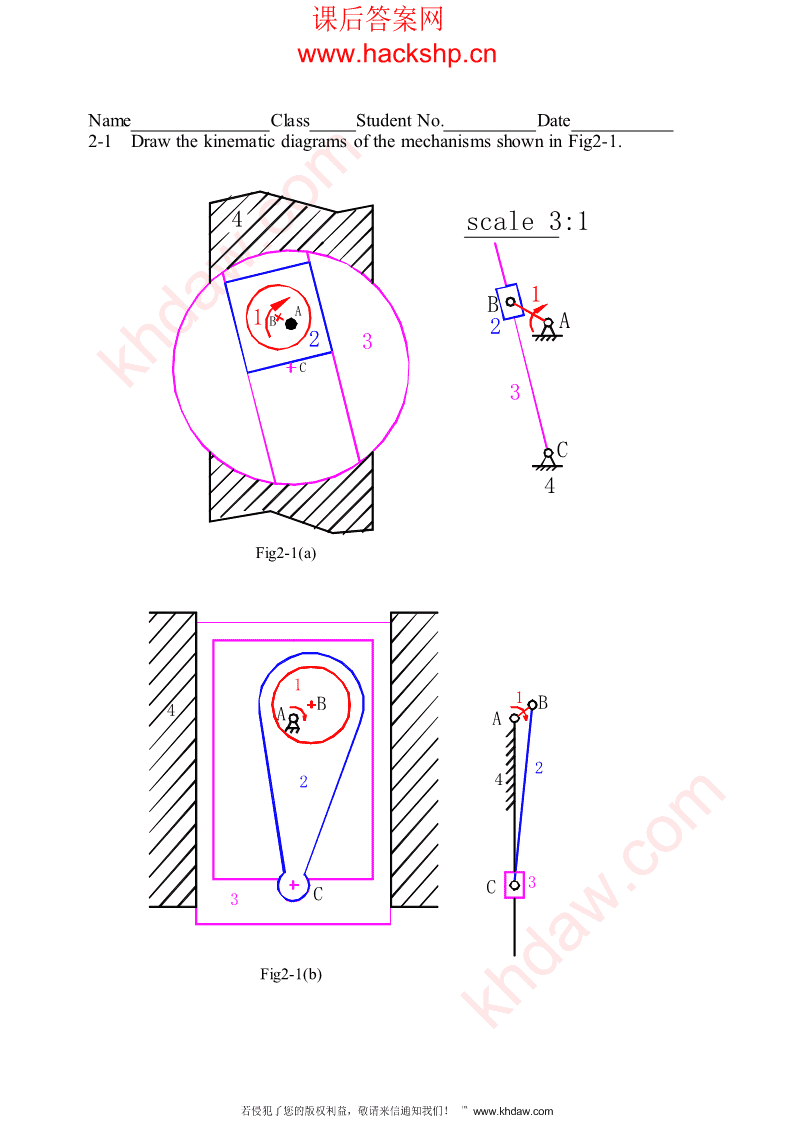
课后答案网www.hackshp.cnNameClassStudentNo.Date2-1DrawthekinematicdiagramsofthemechanismsshowninFig2-1.4scale3:11AB1B2A23khdaw.comC3C4Fig2-1(a)1B1B4AA224C33CFig2-1(b)khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
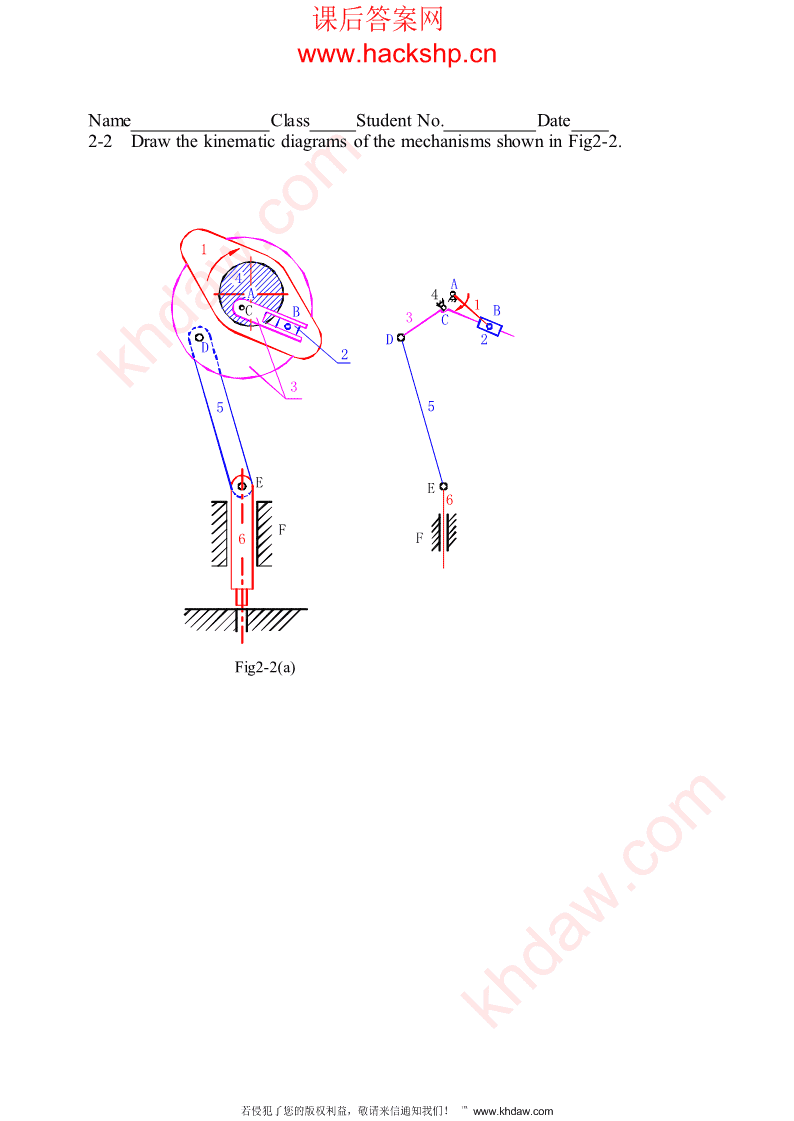
课后答案网www.hackshp.cnNameClassStudentNo.Date2-2DrawthekinematicdiagramsofthemechanismsshowninFig2-2.14AA41CBB3CD2Dkhdaw.com2355EE6F6FFig2-2(a)khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date2-3DrawthekinematicdiagramofthemechanismshowninFig2-3.FHG654AE7D8khdaw.com3I1CB2GFH56AE148ID37CB2Fig2-3khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date2-4CalculatethedegreeoffreedomofthemechanismsshowninFig2-4,andpointoutwhatshouldbepaidattentiontoduringthecalculation.解:(a)左右为对称结构,设左侧为虚约AB束。2(b)E为杆4、5、6的复合铰链。(c)滑C块7与机架8间为移动副。3IFF=3n-2PL-Ph=3×7-2×10=1Redundntkhdaw.comconstraint45HDE6JG78Fig2-4(a)IHDRedundantconstraint32BJ1AGC4KFE56Fig2-4(b)解:(1)红线内的构件为重复结构,构成虚约束。(2)去掉以上构件后,C仍为构件2、3、4的复合铰链。(3)滑块5与机架6之间为移动副。F=3n-2PL-Ph=3×5–2×7=1khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date2-5CalculatethedegreeoffreedomofthemechanismsshowninFig2-5,andpointoutwhatshouldbepaidattentiontoduringthecalculation.M2N解:L(a)两个滚子有局部自由度。C16(b)滚子D与凸轮1之间只能算一3O个高副。B7F=3n-2PL-Ph=3×7–2×9-2=1DAF4E58khdaw.comGFig2-5(a)234AD1B5Fig2-5(b)解:(1)杆件BC与齿轮2焊接在一起。(2)A为齿轮4、杆件1和机架5的复合铰链。F=3n-2PL-Ph=3×4–2×5-1=1常见错误:认为B是复合铰链,而不认为A是复合铰链。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date2-6CalculatethedegreeoffreedomofthemechanismsshowninFig2-6,andpointoutwhatshouldbepaidattentiontoduringthecalculation.解:(a)C为构件2、3、4的复合铰链。2B1C(b)C处有两个转动副和两个移动8A副。E处有一个转动副和两个移43D动副。F=3n-2PL-Ph=3×7–2×10=1E6注意:E不是复合铰链!khdaw.com7Fig2-6(a)55AB=CDBC=AD44CCB262B1313ADADFig2-6(b)解:当构件尺寸任意时,构件2作平面复杂运动,而杆4与机架间组成移动副,所以杆4仅作平动。因此,构件2和构件4之间有相对转动。因此,应该有构件6,并且构件4和6之间有转动副,如右图所示。当AB=CD且BC=AD时,杆2仅作平动。杆4与机架间组成移动副,所以杆4也仅作平动。这样,构件2和构件4之间就没有相对转动,只有相对移动。即:构件4和构件6之间就没有相对转动了,因此,可将构件6与构件4焊接起来(去掉构件6),如左图所示。然而,在计算机构自由度时,应该按一般尺寸情况下进行分析,即:应该按照右图情况来分析机构的自由度。F=3n-2PL-Ph=3×5–2×7=1khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date2-7ThekinematicdiagramofanenginemechanismisgiveninFig2-7.(1)Calculatethedegreeoffreedomofthemechanism,andpointoutwhatshouldbepaidattentiontoduringthecalculation.(2)Makethestructuralanalysisforthemechanism.(3)MakethestructuralanalysisforthemechanismwhenlinkEFGisregardedasthedriver.Note:Duringstructuralanalysis,listtheassemblyorderofAssurgroups,thetypeofgroup,thegradeofgroup,thegradeofthemechanism,thelinkserialnumbers,theinnerpairandtheouterpairsofeachgroupineachmechanism.解:(1)F=3n-2PL-Ph=3×7–2×10=1(2)当khdaw.comAB为原动件时,BD2C1类型杆号内副外副AE435第一杆组RRP2,3转C2-3B,移C3-88F7第二杆组RRR4,5EF,DG6H第三杆组RRP6,7转H6-7G,移H7-8(3)当EFG为原动件时,BD2C14AE358F7GH6类型杆号内副外副III级杆组1,2,3,4B,D,转CA,E,移C3-8RRP6,7转HG,移H7-8khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date2-8MakethestructuralanalysisforthemechanismshowninFig2-8.(a)Whenlink1isregardedasthedriver.(b)Whenlink5isregardedasthedriver.Note:Duringstructuralanalysis,listtheassemblyorderofAssurgroups,thetypeofgroup,thegradeofgroup,thegradeofthemechanism,thelinkserialnumbers,theinnerpairandtheouterpairsofeachgroupineachmechanism.解:D5(a)当1为原动件时4EBEB2AD5D5khdaw.com1CB4EE4ABEFBB3CA22C116AAADCD3CC3Fig2-8F66gradeIIgradeIIIgradeIV杆件2,3,4和5组成一个三级Assurgroup.(b)当5为原动件时杆件3和4组成第一个RPRAssurgroup.杆件1和2组成第二个RPRAssurgroupD54EB21A3C6D5DD54E4EBB2B1A3CA3CAC66khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date2-9TheschematicdiagramofapunchmachinedesignedbysomeoneisshowninFig2-9.Thismachineshouldbeabletotransformacontinuousrotationofgear1intoatranslationofthepunch4.Canthemachineworkproperly?Ifitcan’t,pleaserectifyit.32khdaw.com451Fig2-9解:不能正常工作。改正如图(或者改成题目2-3构件5、6、7的连接)khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date2-10TheschematicdiagramofamechanismdesignedbysomeoneisshowninFig2-10.Thismechanismshouldbeabletotransformacontinuousrotationoflink1intoanoscillationoflink4.Canthemechanismworkproperly?Ifitcan’t,pleaserectifyit.ECkhdaw.com23B41AD5Fig2-10解:不能正常工作。改正后EC2B41ADkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnECCBBAkhdaw.comADkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date3-1LocateallinstantcentresofmechanismsinthepositionshowninFig3-1.P12P24P23∞P24∞)22P23P1213341P34P13P13P14P34P144Fig3-1(a)khdaw.comFig3-1(b)n321OP13∞PP2312nFig3-1(c)nC(P23)43D(P34)154F(P24)A(P15)nH2E(P45)PPP1JP14151445(P25)5B124(P12)P12P14P24GFig3-1(d)khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date∞P14EP(13)G(P23)2V1BD31AF(P)12khdaw.comCP()Fig3-1(e)CP(23)P132142343P12P24P14P23P24P342D(P34)P12121343A4P24∞(P14)PPPPPP1B121323141343Fig3-1(f)khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date3-2InthepositionshowninFig3-2,determinetheratioω3/ω1oftheangularvelocityofgear3tothatofgear1,usingthemethodofinstantcentres.2123163CE4(P12)P12P13P23P16P13P63(P)BF2351D(P36)(P)16A6E(P)313khdaw.comFig3-2解:P13是构件1和3的瞬心,等速重合点,所以ω1LAE=ω3LDEω3/ω1=LAE/LDE3-3InthepositionshowninFig3-3,determinetheratioω2/ω1oftheangularvelocityoffollower2tothatofcam1,usingthemethodofinstantcentres.A(P23)解:3E(P12)是构件1和2的瞬心,等速重合点,2所以ω1LOE=ω2LAEω2/ω1=LOE/LAEE(P)T121O(P13)Fig3-3khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date3-4Inthepivotfour-barlinkageshowninFig3-4,ω1=10rad/sec.Usingthemethodofinstantcentres,(a)FindthevelocityofpointCinthepositionshowninthefigure.(b)Inthepositionshowninthefigure,locatethepointEonthelineBC(oritsextension)whichhastheminimumvelocityamongallpointsoflineBCanditsextension,andthencalculateitsvelocity.(c)drawtwopositionsofthecrankABwhenVC=0.E(P23)Ckhdaw.com2(P12)3Bω11P(34)4DA(P)14ω2P24FFig3-4解:(a)VB1=ω1LAB=VB2=ω2LFB,所以VC=VC2=ω2LFC=ω1LABLFC/LFB(b)VE=ω2LFE。C2(P23)C2C1(P12)3BBω1214D(P34)A(P)14B1(c)VC=0所对应的曲柄AB的两个位置:NameClassStudentNo.Datekhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cn3-5Inthesix-barmechanismshowninFig3-5,XA=0,YA=0,XD=450mm,YD=0,LAB=150mm,LBC=400mm,LDC=350mm,∠CDE=30°,LDE=150mm,LEF=400mm.ThecrankABrotatesataconstantspeed10rad/sec.WriteamainprogramtoanalyzetheoutputmotionofthepointFwhenthedriverABrotatesfrom0°to360°withastepsizeof5°..C2B3Ekhdaw.com5ω1θ1FAD46Fig3-5解:FORI=0TO360STEP5CALLLINK(0,0,0,0,0,0,I*PI/180,10,0,150,XB,YB,VBX,VBY,ABX,ABY)CALLRRR(450,0,0,0,0,0,XB,YB,VBX,VBY,ABX,ABY,350,400,Q3,W3,E3,Q2,W2,E2)CALLLINK(450,0,0,0,0,0,Q3-PI/6,W3,E3,150,XE,YE,VEX,VEY,AEX,AEY)CALLRRP(1,0,400,XE,YE,VEX,VEY,AEX,AEY,Q5,W5,E5)CALLLINK(XE,YE,VEX,VEY,AEX,AEY,Q5,W5,E5,400,XF,YF,VFX,VFY,AFX,AFY)PRINTI,XF,YF,VFX,VFY,AFX,AFYNEXTIkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date3-6InthemechanismshowninFig3-6,XA=0,YA=0,XD=200mm,YD=0,LAB=80mm,LCD=60mmandLBE=380mm.ThecrankABrotatesataconstantspeedof10rad/sec.WriteamainprogramtoanalyzetheoutputmotionofthepointEwhenthedriverABrotatesfrom0°to360°withastepsizeof5°.ECθ13C43AD(380)(0,0)A3ω124(80)2Dkhdaw.comω1=10(200,0)φ2B2Fig3-6φ(60)2FORI=0TO360STEP5CALLLINK(0,0,0,0,0,0,I*PI/180,10,0,80,XB,YB,VBX,VBY,ABX,ABY)CALLRPR(1,XB,YB,VBX,VBY,ABX,ABY,200,0,0,0,0,0,60,Q2,W2,E2)CALLLINK(XB,YB,VBX,VBY,ABX,ABY,Q2,W2,E2,380,XE,YE,VEX,VEY,AEX,AEY)PRINTI,XE,YE,VEX,VEY,AEX,AEYNEXTIkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date3-7.InthemechanismshowninFig3-7,XG=YG=0,XB=-42,YB=39,XD=70,YD=75,LBA=34mm,LGF=24mm,LFE=95mm,LEC=69mm,LDC=48mm,∠EFG=90°.ThecrankBArotatesataconstantspeedof10rad/sec.WriteamainprogramtoanalyzetheoutputmotionofthepointCwhenthedriverBArotatesfrom0°to360°withastepsizeof5°.E6D452khdaw.com1ACB63FG6Fig3-7FORI=0TO360STEP5CALLLINK(-42,39,0,0,0,0,I*PI/180,10,0,34,XA,YA,VAX,VAY,AAX,AAY)CALLRPR(-1,0,0,0,0,0,0,XA,YA,VAX,VAY,AAX,AAY,24,QFE,W3,E3)CALLLINK(0,0,0,0,0,0,QFE+PI/2,W3,E3,24,XF,YF,VFX,VFY,AFX,AFY)CALLLINK(XF,YF,VFX,VFY,AFX,AFY,QFE,W3,E3,95,XE,YE,VEX,VEY,AEX,AEY)CALLRRR(XE,YE,VEX,VEY,AEX,AEY,70,75,0,0,0,0,69,48,QEC,W4,E4,QDC,W5,E5)CALLLINK(70,75,0,0,0,0,QDC,W5,E5,48,XC,YC,VCX,VCY,ACX,ACY)PRINTI,XC,YC,VCX,VCY,ACX,ACYNEXTIkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date3-8Inthesix-barmechanismshowninFig3-8,XB=0,YB=0,XF=37.2,YF=17.5,YC=28.8,LFE=16.8mm,LEC=39.2mm,LCD=20.633mm,LDE=36.4mm,∠BGA=90°,LBG=9mm,LGA=58mm.ThecrankFErotatesclockwiseataconstantspeedof10rad/sec.WriteamainprogramtoanalyzetheoutputmotionofthepointA.whenthedriverFErotatesfrom360°to0°withastepsizeof-5°.AD6khdaw.com5C3F42ω1BEFig3-8ForI=360To0Step-5CallLINK(37.2,17.5,0,0,0,0,16.8,I*PI/180,10,0,XE,YE,VEX,VEY,AEX,AEY)CallRRP(-1,28.8,XE,YE,VEX,VEY,AEX,AEY,39.2,QEC,W4,E4,XC)CallLINK(XE,YE,VEX,VEY,AEX,AEY,QEC-QCED,W4,E4,XD,YD,VDX,VDY,ADX,ADY)CallRPR(1,0,0,0,0,0,0,XD,YD,VDX,VDY,ADX,ADY,LBG,QGA,W2,E2)CallLINK(0,0,0,0,0,0,LBG,3*PI/2+QGA,W2,E2,XG,YG,VGX,VGY,AGX,AGY)CallLINK(XG,YG,VGX,VGY,AGX,AGY,LGA,QGA,W2,E2,XA,YA,VAX,VAY,AAX,AAY)PrintI,XA,YA,VAX,VAY,AAX,AAYNextIkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-1Determinethetypeofthepivotfour-barlinkageswhosedimensionsareshowninFig4-1.901007011045khdaw.com7012040Fig4-1(a)Fig4-1(b)双曲柄机构曲柄摇杆机构505010070901006070Fig4-1(c)Fig4-1(d)双摇杆机构双摇杆机构khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-2Intherevolutefour-barmechanismshowninFig4-2(1)Findthepressureangleαandthetransmissionangleγofthemechanisminthepositionshowninthefigure.(2)FindtheangularstrokeψmaxofthelinkDC.(3)Findthecrankacuteangleθbetweenthetwolimitingpositions.(4)Findthemaximumpressureangleαmaxandtheminimumtransmissionangleγmin.(5)Istheredead-pointduringthewholecycleofthemotionwhenthelinkDCisregardedasthedriver?Ifthereis,when?Anddrawthedead-pointpositionsofthemechanism.khdaw.comααmaxCC1C2C1C23θγγminB22ψmaxADB11B24BB1Fig4-2(5)当DC为原动件时,此机构有死点位置。死点位置为图中AB1C1D和AB2C2D。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-3Designanoffsetslider-crankmechanismABCinwhichthecrankABisthedriver.Themaximumpressureangleαmax=30°.FindthestrokeHofthesliderandthecrankacuteangleθbetweenthetwolimitingpositions.B3B30°B1AθB2khdaw.comeC2C1C3HFig4-34-4DeterminetheangularstrokesoftherockersABandCDshowninFig4-4,respectively,usinggraphicalmethod.BCADφφCDABkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-5InFig4-5therearetwopositions,B1C1andB2C2,ofthecouplerBCofarevolutefour-barlinkageABCD.ThelinkABisadriver.Thepressureangleαatthefirstpositionis0o.Thesecondpositionofthemechanismisatoggleposition.Designthelinkageandwriteoutthedrawingstepsbriefly.DB1khdaw.comC1AB2C2解:a)链点A必在B1B2的垂直平分线上。b)类似的,铰链点D必在C1C2的垂直平分线上。c)AB为原动件时,机构在第一位置的压力角为0o得到B1C1⊥C1D。d)机构的第二位置为一死点位置得到A,B2,C2三点共线。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-6Inacrank-slidermechanism,twosetsofcorrespondingpositionsofthesliderandalinesegmentAEonthecrankABEareshowninFig4-6.ThepositionC1ofthesliderisitsleftlimitingposition.FindthefirstpositionB1oftherevoluteBandwriteoutthedrawingstepsbriefly.E1khdaw.comAE2B1C2C1C2"Fig4-6解:作∆AC2’E1≅∆AC2E2,且字母旋向相同,得C2’。因C1为滑块的极限位置之一,所以B1点在AC1连线上。作C1C2’的中垂线与AC1交于待定活动铰链点B的第一个位置点B1。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-7Inarevolutefour-barlinkageABCD,sidelinkABisthedriver.TwosetsofcorrespondingpositionsofthesidelinkCDandalinesegmentCEonthecouplerCBEareshowninFig4-7.Thefirstpositionofthelinkageisalsoadeadpoint.FindthesecondpositionB2oftherevoluteBandwriteoutthedrawingstepsbriefly.E2B1E1khdaw.comC1C2DA"2AFig4-7解:作∆A2’C1E1≅∆AC2E2,得A2’点。因AB为原动件且机构第一位置为死点,所以B1点在DC1的延长线上。作AA2’的中垂线与DC1的延长线交于待定活动铰链点B的第一个位置点B1。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-8Inacrank-rockerlinkageABCD,sidelinkABisthedriver.TwopositionsoftherockerCDareshowninFig4-8.Atthefirstposition,thepressureangleofthelinkageiszero.PositionDC2isoneofthelimitpositionsoftherocker.FindthefirstpositionB1oftherevoluteBandwriteoutthedrawingstepsbriefly.C1C2B1B2khdaw.comADA"2Fig4-8解:因A点在C2B2延长线上,故在C1B1延长线上截取C1A2’=C2A,得A2’点。作AA2’的中垂线与C1B1交于待定活动铰链点B的第一个位置点B1。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-9Inanoffsetslider-crankmechanismABC,twosetsofcorrespondingpositionsofthecrankABandapointFonthesliderareshowninFig4-9.WhenthecrankABislocatedatpositionAB1,thesliderreachesitsleftlimitposition.FindthefirstpositionC1oftherevoluteConthesliderandwriteoutthedrawingstepsbriefly.B"2B2C1khdaw.comF1F2AB1E1E2Fig4-9解:作B2B2’//=F1F2,得B2’点因为第一位置是滑块的左极限位置,故C1在B1A的延长线上.作B1B2’的中垂线,交B1A的延长线于待定活动铰链点C的第一个位置点C1。作C1C2=F1F2,得C2点。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-10Inacrank-rockermechanismABCD,thecoefficientoftravelspeedvariation(k)is1.25,whencrankABrotateconstantly.TheangularstrokeofrockerDCψ=60o.ThelengthoftherockerDCis40mm.ThelengthoftheframeADis50mm.Designthemechanismandwriteoutthedrawingstepsbriefly.C1C290°Eψ70°Fkhdaw.comAB2AB1D50H解:(取比例尺μl=0.001m/mm)0k−101.251−0θ=180×=180×=20k+11.251+取DC1=DC22=40mm=40mm,作直角三角形C1C2H,其中∠C1C2H=90º-θ=70º作三角形C1C2H的外接圆,以D点为圆心,以50mm为半径作圆,两圆的交点为铰链点A。连接AC1、AC2,以A点为圆心,以(AC2-AC1)/2为半径作圆得铰链点B,AB=17.98mmBC=53.72mmkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date4-11Inanoffsetslider-crankmechanism,theoffseteis20mm.Thecoefficientoftravelspeedvariationkis1.3.TheworkingstrokeHoftheslideris50mm.Designtheoffsetslider-crankmechanismkhdaw.comOB1AB286.5°86.5°C1C2解:(取比例尺μl=0.001m/mm)0k−101.31−0θ=180×=180×=23.5k+11.31+作C1C2=50mm,作等腰三角形OC1C2其中∠OC1C2=∠OC2C1=90º-θ=86.5º,以O为圆心,以OC1为半径作圆作一与C1C2平行且距离为20mm的直线,此直线与圆O的交点为铰链点A以A为圆心,以(AC2-AC1)/2为半径作圆A得到铰链点B。BC=55.06mm,AB=22.83mm.khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-1Aplatecamwithpositive-offsettranslatingrollerfollowerhasthefollowingmotion:arisethroughlifth=40mmwithasineaccelerationmotioncurveduringδ0=150°,δS=30°,areturnwitha3-4-5polynomialmotioncurveduringδ0"=120°,andδS"=60°.Thecamrotatesclockwise.AndrP=40mm.rR=12mm,e=12mmandrC=25mm.Constructthepitchcurveandthecamcontourgraphicallywithascaleof1:1.Labelinredthecenterlineofthefollower,S,therollerandαwhenδ=60°andδ=0°.δ0°30°60°90°120°150°180°210°240°270°300°330°360°S(mm)07.8615.7223.5831.44404035.86204.14000khdaw.comαS=0B11B0B1"αB10B1B2SB9B9B2B3OB8ωB3B8B7B4B6B5B4B7B5B6khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-2Aplatecamwithtranslatingoffsetrollerfollowerhasthesamemotioncurveanddimensionsasexercise5-1has.Writeaprogramtocalculatetheco-ordinatesofthepitchcurve,thecamcontourandthelocusofthecenterofthemillingcutter,αandρB.SETWINDOW-100,120,-100,60LETM=-1LETN=+1LETRP=40LETE=12LETRR=12khdaw.comLETRC=25LETH=40LETDELTA0=150*PI/180LETDELTAS=30*PI/180LETDELTA01=120*PI/180LETDELTAS1=60*PI/180LETS0=SQR(RP^2-E^2)BOXCIRCLE-RP,RP,-RP,RPBOXCIRCLE-E,E,-E,EFORI=0TO360STEP.005LETDELTA=I*PI/180IFDELTA<=DELTA0THENLETDD=DELTA/DELTA0LETS=H*(DD-1/2/PI*SIN(2*PI*DD))LETS1=H/DELTA0*(1-COS(2*PI*DD))LETS11=2*PI*H/DELTA0^2*SIN(2*PI*DD)ELSEIFDELTA<=(DELTA0+DELTAS)THENLETS=HLETS1=0LETS11=0ELSEIFDELTA<=(DELTA0+DELTAS+DELTA01)THENLETD4=(DELTA-DELTA0-DELTAS)/DELTA01LETS=H*(1-10*D4^3+15*D4^4-6*D4^5)LETS1=-H/DELTA01*(30*D4^2-60*D4^3+30*D4^4)khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnLETS11=-H/DELTA01^2*(60*D4-180*D4^2+120*D4^3)ELSELETS=0LETS1=0LETS11=0ENDIFLETXB=M*((S0+S)*SIN(DELTA)+N*E*COS(DELTA))LETYB=(S0+S)*COS(DELTA)-N*E*SIN(DELTA)LETXB1=M*(S1*SIN(DELTA)+(S0+S)*COS(DELTA)-N*E*SIN(DELTA))LETYB1=S1*COS(DELTA)-(S0+S)*SIN(DELTA)-N*E*COS(DELTA)LETKB=SQR(XB1^2+YB1^2)khdaw.comLETXT=XB+M*RR*YB1/KBLETYT=YB-M*RR*XB1/KBLETXC=XT-M*RC*YB1/KBLETYC=YT+M*RC*XB1/KBLETALAFA=ARCTAN(ABS(S1-N*E)/(S0+S))LETLOUB=((S0+S)^2+(S1-N*E)^2)^1.5/(-(S0+S)*(S11-S0-S)+(S1-N*E)*(2*S1-N*E))PLOTXB,YBPLOTXT,YTPLOTXC,YCNEXTIENDkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-3IntheplatecamwithtranslatingoffsetrollerfollowerasshowninFig5-1,GHandIJaretwoarcswithcenteratO.IndicateradiusofprimecirclerP,offsete,camangleforriseδ0,camangleforouterdwellδS,camangleforreturnδ0",camangleforinnerdwellδS"andlifth.InthepositionshowninFig5-1,indicatepressureangleα,displacementSandthecorrespondingcamangleδ.αkhdaw.comsBIHδsδδ0erpOωhδ0GJδsFig5-1khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-4IntheplatecamwithtranslatingoffsetrollerfollowerasshowninFig5-2,EA,ABandBCDarethreearcswithcenteratO,NandP,respectively.IndicateradiusofprimecirclerP,offsete,camangleforriseδ0,camangleforouterdwellδS,camangleforreturnδ0",camangleforinnerdwellδS"andindicatelifth,pressureangleα,displacementSandthecorrespondingcamangleδinthepositionshowninFig5-2,.αkhdaw.comsABrpeδδsOδ0PCωNhδ0EDδs0Fig5-2khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-5AplatecamwithanoscillatingrollerfollowersimilartothatinFig.5-36oftextbookistohavethefollowingmotion:anangularliftφMAX=20°withasineaccelerationmotioncurveduringδ0=150°,δS=30°,areturnwitha3-4-5polynomialmotioncurveduringδ0"=120°andδS"=60°.Thegivendimensionsare:rP=40mm,LOA=80mm,LAB=76mm,rR=12mmandrC=16mm.Constructthepitchcurveandthecamcontourgraphicallywithascaleof1:1.LabelinredinktheframeOA,φ,centrelineABofthefollower,therollerandαcorrespondingtoδ=60°andδ=0°.δ0°30°60°90°120°150°180°210°240°270°300°330°360°ϕ0°3.93°7.86°11.79°15.72°20°20°17.93°10°2.07°0°0°0°khdaw.comф=0°A0фA11A1A10B9B10A2B8B11B0ωA9B7Oα=0°A3B1B6A8B2A4B5B3B4A7αA5A6khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-6Aplatecamwithanoscillatingrollerfollowerhasthesamemotioncurveanddimensionsasexercise5-5has.Writeaprogramtocalculatetheco-ordinatesofthepitchcurve,thecamcontourandthelocusofthecenterofthemillingcutter,thepressureangleαandtheradiusofcurvatureρBofthepitchcurve.SETWINDOW-100,120,-100,60LETM=+1LETN=+1LETRP=40LETRR=12LETRC=16khdaw.comLETH=20LETLOA=80LETLAB=76LETDELTA0=150*PI/180LETDELTAS=30*PI/180LETDELTA01=120*PI/180LETDELTAS1=60*PI/180LETS0=ARCTAN(SQR((2*LOA*LAB)^2-(LOA^2+LAB^2-RP^2)^2)/(LOA^2+LAB^2-RP^2))BOXCIRCLE-RP,RP,-RP,RPFORI=0TO360STEP.005LETDELTA=I*PI/180IFDELTA<=DELTA0THENLETDD=DELTA/DELTA0LETS=H*(DD-1/2/PI*SIN(2*PI*DD))LETS1=H/DELTA0*(1-COS(2*PI*DD))LETS11=2*PI*H/DELTA0^2*SIN(2*PI*DD)ELSEIFDELTA<=(DELTA0+DELTAS)THENLETS=HLETS1=0LETS11=0ELSEIFDELTA<=(DELTA0+DELTAS+DELTA01)THENLETD4=(DELTA-DELTA0-DELTAS)/DELTA01LETS=H*(1-10*D4^3+15*D4^4-6*D4^5)LETS1=-H/DELTA01*(30*D4^2-60*D4^3+30*D4^4)khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnLETS11=-H/DELTA01^2*(60*D4-180*D4^2+120*D4^3)ELSELETS=0LETS1=0LETS11=0ENDIFLETXB=M*(LOA*SIN(DELTA)+N*LAB*SIN(S0+S-N*DELTA))LETYB=LOA*COS(DELTA)-LAB*COS(S0+S-N*DELTA)LETXB1=M*(LOA*COS(DELTA)+N*LAB*COS(S0+S-N*DELTA)*(S1-N))LETYB1=-LOA*SIN(DELTA)+LAB*SIN(S0+S-N*DELTA)*(S1-N)LETKB=SQR(XB1^2+YB1^2)khdaw.comLETXT=XB+M*RR*YB1/KBLETYT=YB-M*RR*XB1/KBLETXC=XT-M*RC*YB1/KBLETYC=YT+M*RC*XB1/KBLETALAFA=ARCTAN(ABS(LAB*(1-N*S)-LOA*COS(S0+S))/(LOA*SIN(S0+S)))LETK=(1-N*S)*(2-N*S)*COS(S0+S)+S11*SIN(S0+S)LETLOUB=(LOA^2+LAB^2*(1-N*S1)^2-2*LOA*LAB*(1-N*S1)*COS(S0+S))^1.5/(LOA^2+LAB^2*(1-N*S1)^3-LOA*LAB*K)PLOTXB,YBPLOTXT,YTPLOTXC,YCNEXTIENDkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-7Intheplatecammechanismwithoscillatingrollerfollower,thecamisacirclewithcenteratC.IndicateradiusofprimecirclerP,camangleforriseδ0,camangleforouterdwellδS,camangleforreturnδ0",camangleforinnerdwellδS"andangularliftφmax.InthepositionshowninFig5-4,indicatepressureangleα,angulardisplacementoffollowerφandthecorrespondingcamangleδ.αkhdaw.comA2δs0Bфmaxδrpωфδ0COAB2B1δ0B1"δs=0A1Fig5-4khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-8Aplatecamwithatranslatingflat-facedfollowerhasthefollowingmotion:arisethroughlifth=40mmwithasineaccelerationmotioncurveduringδ0=150°,δS=30°,areturnwitha3-4-5polynomialmotioncurveduringδ0"=120°andδS"=60°.Thecamrotatesclockwise.AndrP=40mm.rC=20mm.Constructthepitchcurveandthecamcontourgraphicallywithascaleof1:1.Labelinredthefollowercenterline,S,theflatface,thetangentpointTbetweenthecamcontourandαwhenδ=60°andδ=0°.δ0°30°60°90°120°150°180°210°240°270°300°330°360°S(mm)07.8615.7223.5831.44404035.86204.14000khdaw.coms=0α=0°1"α=0°2"01T11s10T23"O99"3ω847568"4"7"5"6"khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date5-9Aplatecamwithatranslatingflat-facedfollowerhasthesamemotioncurveanddimensionsasexercise5-8has.Writeaprogramtocalculatetheco-ordinatesofthepitchcurve??,thecamcontourandthelocusofthecenterofthemillingcutterandρT.LETM=-1LETRP=40LETH=40LETRC=20LETDELTA0=150*PI/180LETDELTAS=30*PI/180khdaw.comLETDELTA01=120*PI/180SETWINDOW-90,90,-90,40BOXCIRCLE-RP,RP,-RP,RPFORI=0TO360STEP0.5LETDELTA=I*PI/180IFDELTA<=DELTA0THENLETD2=DELTA/DELTA0LETS=H*(D2-1/2/PI*SIN(2*PI*D2))LETS1=H/DELTA0*(1-COS(2*PI*D2))LETS11=2*PI*H/DELTA0^2*SIN(2*PI*D2)ELSEIFDELTA<=(DELTA0+DELTAS)THENLETS=HLETS1=0LETS11=0ELSEIFDELTA<=(DELTA0+DELTAS+DELTA01)THENLETD4=(DELTA-DELTA0-DELTAS)/DELTA01LETS=H*(1-10*D4^3+15*D4^4-6*D4^5)LETS1=-H/DELTA01*(30*D4^2-60*D4^3+30*D4^4)LETS11=-H/DELTA01^2*(60*D4-180*D4^2+120*D4^3)ELSELETS=0LETS1=0LETS11=0ENDIFkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnLETXB=M*(RP+S)*SIN(DELTA)LETYB=(RP+S)*COS(DELTA)LETXT=M*((RP+S)*SIN(DELTA)+S1*COS(DELTA))LETYT=(RP+S)*COS(DELTA)-S1*SIN(DELTA)LETXB11=+LOA*SIN(DELTA)+LAB*SIN(Q0+Q-DELTA)*(Q1-1)^2-LAB*COS(Q0+Q-DELTA)*Q11LETYB11=-LOA*COS(DELTA)+LAB*COS(Q0+Q-DELTA)*(Q1-1)^2+LAB*SIN(Q0+Q-DELTA)*Q11LETXT1=M*(S1*SIN(DELTA)+(RP+S)*COS(DELTA)+S11*COS(DELTA)-S1*SIN(DELTA))LETYT1=S1*COS(DELTA)-(RP+S)*SIN(DELTA)-(S11*SIN(DELTA)+S1*COS(DELTA))LETXC=XT-M*RC*YT1/SQR(YT1^2+XT1^2)khdaw.comLETYC=YT+M*RC*XT1/SQR(YT1^2+XT1^2)LETLOUT=RP+S+S11PLOTXB,YBPLOTXT,YTNEXTIENDkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-1Apairofstandardinvolutespurgearshaveamoduleof5mm,pressureangleα=20°,centerdistancea=350mm,transmissionratioi12=9/5.Calculatethenumbersofteeth(Z1andZ2),referencediameters(d1andd2),addendumdiameters(da1andda2),basediameters(db1anddb2),tooththicknesss,spacewidthe,pressureanglesontheaddendumcircles(αa1andαa2),theradiiofcurvaturesoftoothprofileonthereferencecircles(ρ1andρ2),andtheradiiofcurvaturesoftoothprofileontheaddendumcircles(ρa1andρa2)..解:"""a=d1+d2=350mmd1=250mmkhdaw.com2"d=450mm"2d29i==12"d51"d=d=250mm11"d=d=450mm22d250z=1==50mm1m5d450z=2==90mm2m5*da1=d1+2ha=d1+2hma=2502*1*5+=260mm*da2=d2+2ha=d2+2hma=4502*1*5+=460mmodb1=d1cosα=250*cos20=234.92mmodb2=d2cosα=450*cos20=422.86mmpπmπ∗5s==e===7.854mm222khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-2Howmanyteethwouldanexternalstandardinvolutespurgearhaswhenitsdedendumcircleanditsbasecirclecoincide?Whichoneisbiggerasthenumberofteethincreases?解:d=dabd−2h=dcosαa*zh−=zcosαa*zh−=zcosαakhdaw.com2h*a1−=cosαz*2h2*1az===33.16o1cos−α1cos20−z≥34IfZincreases,thendaisbigger.khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-3InFig6-1thereareapairofinvoluteprofilesC1andC2withthecommonnormaln-npassingthroughthecontactpointK.1)Drawthetwobasecirclesandtwopitchcircles.LabelthetheoreticallineofactionN1N2andactuallineofactionB1B2.Labeltheworkingpressureangleα’andpressureangleαKatthepointK.LabeltheactualworkingsectionDGoftheprofileC2.2)FindoutpointM2ontheprofileC2thatwillengagewithpointM1ontheprofile1.O1nkhdaw.comO1rnb1r1"N1M1M1GM2B2α"MC2C2PC1C1KKαKDB1N2r2"rb2nnO2O2Fig6-1khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-4InFig6-2thereareapairofinvolutepinionandrackwiththeirpitchcircleandpitchline.DeterminegraphicallytheactuallineofactionB1B2,theactualworkingsectionEFonthetoothprofileofthepinionandtheactualworkingsectionGHonthetoothprofileoftherack.O1khdaw.comB2HEB1PGFFig6-2khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-5InapairofexternalspurgearsZ1=10,Z2=27,m=10mm,α=20°,ha*=1,c*=0.25,workingcenterdistancea’=185mm.Neithergearhascutterinterference.(1)Whattypeofcorrectedgearpairdoesitbelongto?Why?(2)Calculatetherangesofmodificationcoefficientsx1andx2,respectively.(3)Whenx1=0.5,calculatera2,rb2,S2,αa2,andρa2forgear2.解:(1)mz(1+z2)10×(1027+)a===185mm22acosα=a′cosα′0khdaw.comα′=202(x1+x2tan)αinvα′=+invαz+z12x+x=0为等变位齿轮12(2)220*z1sinα10sin20×x≥h−=−1=0.421a22x≤−0.422(3)x=0.51x=−0.52**mz1**rf1=r1−(ha+cm+)xm1=−(ha+cm+)xm121010×=−(10.25)*100.5*10++=42.5mm2*r=a′−r−cm=18542.50.2510140−−×=mma2f1mz201027×0r=rcosα=cos20=cos20=126.86mmb2222⎛π⎞⎛π0⎞s2=⎜+2x2tanα⎟m=⎜+×−2(0.5tan20)⎟×1012.07=mm⎝2⎠⎝2⎠=rb2=126.86=0=0′′′αarccosarccos25.02250120a2r140a22222ρ=r−r=140−126.86=59.22mma2a2b2khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-6Inapairofexternalspurgears,Z1=20,Z2=40,m=2mm,(ha*=1,c*=0.25,)α=20°,df1=37.0mm,S2=2.413652185mm.(1)Calculatethemodificationcoefficientsx1andx2(2)Whattypeofcorrectedgearpairdoesitbelongto?Why?(3)Calculaterb1,ra1,αa1,ρa1,S1,andρ1ofgear1.解:(1)**mz1**37.0rf1=r1−(ha+cm+)xm1=−(ha+cm+)xm1==18.522x=0.51⎛π⎞s=⎜+2xtanα⎟m=2.413652185mm22khdaw.com⎝2⎠x=−0.52(2)∵x+x=∴0为等变位齿轮12(3)mz1r==20mm120r=rcosα=20cos20×=18.79mmb11**mz2**rf2=r2−(ha+cm+)xm2=−(ha+cm+)xm22240×=−(10.25)20.52+×−×=36.5mm2∵这一对齿轮为等变位齿轮m∴a′=a=(z1+z2=)60mm2*r=a′−r−cm=6036.50.252−−×=23mma1f2rb118.790=0′′′α=arccos=arccos=35.22351307a1r23a12222ρ=r−r=23−18.79=13.26mma1a1b1⎛π⎞⎛π0⎞S=⎜+2tanxα⎟m=⎜+×20.5tan20⎟×=23.87mm11⎝2⎠⎝2⎠2222ρ=r−r=20−18.79=6.85mm11b1khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-7ThereareapairofexternalstandardspurgearsinashapingmachinewithZ1=17,Z2=118,m=5mm,α=20°,ha*=1,c*=0.25.Thepinioniswornoutandthegearisworntosuchanextentthatthetooththicknessisdecreasedby0.75mm.Thegearistoberepairedbyaddendummodificationandanewpinionistobemanufacturedtomeshwiththerepairedgear.(1)Whatistheminimummodificationcoefficientofthenewpinioniftheoriginalframeisstillused?(2)Whenx1=0.3,calculatera1,rf1,S1,αa1,ρa1,andεα.解:(1)⎛π⎞πs=⎜+2xtanα⎟m=m−0.7522khdaw.com⎝2⎠2x=−0.21⇒x=−0.2122max∵a=a′∴此对齿轮为等变位齿轮x+x=⇒0x=0.21121min(2)x=0.3⇒x=−0.312mzr=1=42.5mm12mz2r==295mm220r=rcosα=42.5cos20×=39.94mmb110r=rcosα=295cos20×=277.21mmb22**rf1=r1−(ha+cm+)xm1=42.5(10.25)50.3537.75−+×+×=mm**mz2**rf2=r2−(ha+cm+)xm2=−(ha+cm+)xm225118×=−(10.25)+×−50.35×=287.25mm2m∵这一对齿轮为等变位齿轮∴a′=a=(z1+z2=)337.5mm2*r=a′−r−cm=337.5287.250.255−−×=49mma1f2*r=a′−r−cm=337.537.750.255−−×=298.5mma2f1khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date=rb1=39.94=0=0′′′αarccosarccos35.40352409a1r49a1=rb2=277.21=0=0′′′αarccosarccos21.77214614a2r298.5a22222ρ=r−r=49−39.94=28.39mma1a1b1⎛π⎞⎛π0⎞S=⎜+2tanxα⎟m=⎜+×20.3tan20⎟×=58.95mm11⎝2⎠⎝2⎠1ε=⎡z(tanα−tanα′)+ztan(α−tanα′)⎤α⎣1a12a2⎦khdaw.com2π=1⎡×0−0+×0−0⎤⎣17(tan35.40tan20)118tan21.77(tan20)⎦2π=1.60khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-8InthegeartrainshowninFig6-3,bothgearpairsmusthavethesameworkingcenterdistance.Z1=27,Z2=60,Z2’=63,Z3=25,(ha*=1,c*=0.25,)m=5mm.Thegearpair2’and3isacorrectedgearpairwithreferencecenterdistance.Themodificationcoefficientx2ofthegear2iszero.(1)Whattypeofcorrectedgearpairshouldthegearpair1and2be?Givethebriefreason.(2)Isthegear2astandardgear?Why?(3)Calculatex1,S1,rb1,rf1,αa1,andρa1.解:(1)13khdaw.commz(2′+z3)5×(6325+)a23′′=a23′===220mm220α23′′=2022"mz(1+z2)a12′=a23′′=220mma,12==217.5mm2a12cosα00α′=arccos=21.72=214312′′′12a′12(invα12′−invα)(⋅z1+z2)Fig6-3x+x=122tanα(0.0192580.014904−)(⋅z1+z2)==0.522tanα齿轮1和齿轮2为一对正传动齿轮。(2)齿轮2不是标准齿轮。mz(1+z2)∵a′=220mm>a==217.5mm12122齿轮2的齿全高与标准齿轮不同。(3)x=0.52−x=0.5212⎛π⎞⎛π0⎞S=⎜+2tanxα⎟m=⎜+×20.52tan20×⎟×=59.75mm11⎝2⎠⎝2⎠mz1r==67.5mm12khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cn0r=rcosα=67.5cos20×=63.43mmb11**rf1=r1−(ha+cm+)xm1=67.5(10.25)50.52563.85−+×+×=mmmz2r==150mm220r=rcosα=150cos20×=140.95mmb22**rf2=r2−(ha+cm+)xm2=150(10.25)505143.75−+×+×=mm*r=a′−r−cm=220143.750.25−−×=575mma112f2=rb1=0=0′′′khdaw.comαa1arccos32.25321458ra12222ρ=r−r=75−63.43=40.02mma1a1b1khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-9Theparametersofapairofexternalspurgearsuchasm,Z1,i12,α,ha*,c*,S1,andrf2.sareknown:Writeallformulaetocalculateεαaccordingtocalculationstep.解:z=iz2121mzmz12r=,r=1222r=rcos,αr=rcosαb11b22**khdaw.comrf2=r2−(ha+cm+)xm2⇒x2⎛π⎞S=⎜+2tanxα⎟m⇒x111⎝2⎠**rf1=r1−(ha+cm+)xm12(x1+x2tan)αinvα′=+invα⇒α′z+z12macosαa=(z1+z2,a)′=2cosα′**r=a′−r−cmr,=a′−r−cma1f2a2f1rrb1b2α=arccos,α=arccosa1a2rra1a21εα=⎡⎣z1(tanαa1−tanα′)+z2tan(αa2−tanα′)⎤⎦2πkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-10InapairofstandardexternalhelicalgearsZ1=20,Z2=40,mn=8mm,αn=20°,han*=1,??c*=0.25,B=30mm,a=250mm.Findthehelixangleβ,totalcontactratioεγandthevirtualnumbersofteethZv1,Zv2.解:mn(z1+z2)8×(2040+)00β=arccos=arccos=16.26=161537′′′2a2250×′=tanαn=0=0′′′αarctg20.76204549tcosβmzmzn1n2khdaw.comr1==83.333mmr,2==166.667mm2cosβ2cosβr=rcosα=78.31mmr,=rcosα=156.62mmb11b22∗∗r=r+hm=91.333mmr,=r+hm=174.667ma11anna22annrb10rb20α=arccos=30.97,α=arccos=26.27at1at2rra1a21εα=⎡⎣z1(tanαat1−tanαt′)+z2tan(αat2−tanαt′)⎤⎦2π=1.433Bsinβε==0.334βπmnε=ε+ε=1.77γαβz1z==22.61v13cosβz2z==45.21v23cosβkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-11Apairofstandardexternalhelicalgearswithtransmissionratioi≈3.5istobedesigned.Accordingtothestrengthcalculation,mn=2.5mm,amin=111.5mm.FindaintegralcenterdistanceaandcorrespondingZ1,Z2,thehelixangleβ.解:取a=115mm0初选β=1502cosaβ2115cos15××z===19.741mn(1+i)2.54.5×取z=20khdaw.com1z=702mn(z1+z2)2.5×(2070+)00β=arccos=arccos=11.97=115807′′′2a2115×khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-12ThenumberoftheteethofastandardwormwheelZ2is40,referencediameterd2=320mm.Itmesheswithasingle-threadedworm.(1)Determinemoduleofthewormgearonthemid-planemt2andmx1;(2)Determineaxialpitchpx1andleadloftheworm;(3)Choosereferencediameterofworm;(4)Calculateleadangleλ1oftheworm;(5)Calculatecenterdistanceawithoutmodification.解:(1)d2m==8mmt2zkhdaw.com2m=m=8mmx1t2(2)p=πm=15.13mmx1x1l=p=15.13mmx1(3)d=80mm1(4)mzx11800λ=arctg=arctg=5.71=54238′′′1d801(5)dd12a=+=40160+=200mm22khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date6-13InapairofstraightbevelgearsZ1=15,Z2=30,m=5mm,ha*=1,c*=0.2,∑=90°.Calculated1,d2,da1,da2,df1,df2,δ1,δ2,δa1,δa2,δf1,δf2,R,Zv1andZv2whenbottomclearanceisconstant.解:z200δ=arctg()=arctg2=63.43=632620′′′2z1o00δ=90−δ=26.57=263340′′′12d=mz=5*1575=mm11d=mz=5*30150=mmkhdaw.com22*d=d+2hmcosδ=83.944mma11a1*d=d+2hmcosδ=154.316mma22a2**d=d−2(h+cm)cosδ=64.267mmf11a1**d=d−2(h+cm)cosδ=144.633mmf22a2122R=d+d=83.85mm122hh*cm*f(a+)00θ=θ=arctg()=arctg()=4.09=4534′′′afRR00δ=δ+θ=30.66=303914′′′a11a00δ=δ+θ=68.52=673154′′′a22a00δ=δ−θ=22.48=22286′′′f11f00δ=δ−θ=59.34=592046′′′f22fz1z==16.77v1cosδ1z2z==67.07v2cosδ2khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-1AhoistisshowninFig7-1.Theteethnumbersofallthegearsislistedasfollows,Z1=20,Z2=50,Z2’=15,Z3=30,Z3’=1,Z4=40,Z4’=18,Z5=52.Findthetrainratioi15andpointouttherotatingdirectionofthehandletoraisetheweight.54"3"khdaw.com2312"解:ZZZZ50*30*30*521300i=2345===433.315ZZZZ20*15*1*1831"2"3"4khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-2ThegeartraininaclockisshowninFig7-2.S,MandHdenotethepointersofsecond,minuteandhour,respectively.?AllgearsinFig7-2arestandardspurgears.InthisgeartrainZ1=Z2’=8,Z2=64,Z3’=12,Z4’=15.Ifthemodulesofgear4andgear5areequal,findthenumbersofteethZ3,Z4,andZ5.解:zzin23S∵i===6013"zzin12M4"4"60zzi60*8*8∴z=12==603z2643khdaw.comMzzini=45=M=123"35"""zzin34HH∵m4=m55∴m3"=m4=m4"=m52"2∵a"=a"S3445∴z3"+z4=z4"+z51Fig7-2z=484z=455khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-3ShowninFig7-3isageartraininwhichgear3engageswithgears2and4simultaneously.Whatkindofgeartrainisit?IfZ1=34,Z2=Z3=20,Z4=74,findthetrainratioi1H.解:1,4,2——3,H组成一差动轮系,得:Hn1−nHzzz2ii3437i==−=−14n−nzzzii174H123∵n=042n3754∴i=1=+1=1HHkhdaw.comnH171714Fig7-3khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-4InadifferentialgeartrainshowninFig7-4,Z1=15,Z2=25,Z2’=20,Z3=60,n1=200r/min,n=50r/min.FindboththemagnitudeandthedirectionofnHwhen3(1)nandn3areinthesamedirection;1(2)nandn3areintheoppositedirections.1解:此轮系为一差动轮系22"Hn1−nHzz2i325*60i==−=−=−513"n−nzzi15*20H3H121()1khdaw.comn=200/minr,n=50/minr313n+5n2005*50+13n===75/minrHFig7-466∴H的转速为75r/min,方向与轮转向相同。1(2)n=200/minr,n=−50/minr13n+5n2005*50−n=13==−8.33/minrH66∴H的转速为8.33r/min,方向与轮转向相反。1khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-5InthecombinedgeartrainshowninFig7-5,Z1=36,Z2=60,Z2’=23,Z3=49,Z3’=69,Z4=31,Z5=131,Z6=94,Z7=36,Z=167,n1=3549r/min.Findboththe8magnitudeandthedirectionofnH.解:1,2,2’,3组成一定轴轮系,得H743nzzi60*49i=1=23=14nzzi36*23312′6*507*2363"∴nkhdaw.com3=2"70"85n=nn1333’,4,5,6组成一行星轮系,得:126n3"−n6z5i"==−35n−nz563′131Fig7-5=−6969"∵n=∴0n=n5632006,7,8,H组成一行星轮系,得:Hn6−nHz8167i==−=−68n−nz948H6∵n=0894∴n=nH626194696*507*23∴n=**=1.77/minrH26120070转向如图所示。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-6InthecombinedgeartrainshowninFig7-6,Z1=20,Z2=25,Z3=15,Z1’=30,Z4=70,Z4’=60,nH=110r/min.Findboththemagnitudeandthedirectionofn1.解:21,4,3,′′H组成一差动轮系3n−nz6011"H1′H4′i14′′==−=−=−2Hn−nz304′H1′nHn1′=−2n4′+3nH=−2n4′+330nkhdaw.com1=n1′44"n4=n4′Fig7-61,2,4组成定轴轮系nz⋅zz71424i====14nz⋅zz24211∴n=210/minr1n=60/minr4n=−2n+3n=−×260330+1′4′H=210/minr1轮转向与的转向相同。nHkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-7InthecombinedgeartrainshowninFig7-7,Z1=Z5=Z6=17,Z2=27,Z2’=18,Z3=34,Z4=51.n1=110r/min.Findboththemagnitudeandthedirectionofn6.解:1,3,2—2´,6组成一差动轮系,得2"6n1−n6zz2i3i13==−"nn−nzzi36121227*346=−=−3khdaw.com17*186,4,5,3组成一行星轮系,得:51n−nz33436i==−46n−nz4634171=−=−Fig7-7513∵n=04n∴n=634n131∴i===3.2516n46n110n=1==33.85/minr63.253.25转向1轮转向相同。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-8InageartrainshowninFig7-8,Z1=6,Z2=Z2’=25,Z3=57,Z4=56.Findthetrainratioi14.解:1,3,2,H组成一行星轮系,得:2Hn1−nHzz2i357192"i==−=−=−13Hn−nzzi623H12∵n=0312∴n=nkhdaw.comH134211,4,2—2´,H组成一差动轮系,得:Fig7-8Hn1−nHzz2i4i==−14"n−nzzi4H12"∵z=z22H5628∴i=−=−1463n1i==−58814n4khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-9InthegeartrainshowninFig7-9,Z2=15,nMH=12rpm,nH=-2rpm.CalculateZ1.MH21khdaw.comFig7-9解:给整个机构以-nH得一定轴轮系:Hn1−nHz215i===12n−nzz2H11n−n21H==Hn12M∴z=901khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date7-10InthegeartrainshowninFig.7-10,Z1=20andi1H=4.5.Allthegearsare*standardspurgearswithha=1.(1)DeterminethenumbersofteethZ2andZ3andthenumberofplanetgearsk.??(2)Ifthemechanicalefficiencyofeverypairofgearsisη=0.9,findthemechanicalefficiencyofthegeartrainη1H.解:(1)1,3,2,H组成一行星轮系,得:2Hn1−nHz3i==−13n−nzkhdaw.com3H1H∵n=0,i=4.531Hn1z31∴=+1=4.5nzH13z=703Fig7-10a=r−r1232由于所有齿轮皆为标准齿轮且1、2,2、3之间相互啮合mz(1+z2)mz(3−z2)∴=22z−zz=31=2522z+z90k=13=NN0180*∵(z+zsin)>z+2h122ak∴011H111H111N−N1fHηkhdaw.com1H==−−11iH1(1−η13)N1Hη=13khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date9-1Inthecam-linkageshowninFig9-1,thedrivingrotaryblock1rotatescontinuously.Bydesigningthecontourofthefixedcamcorrectly,theslidingblock4canbegivenapredeterminedmotion.(1)Analyzethemotiontransmissionrouteanddrawitsstructuralblockdiagram.(2)Identifythecombinationpatternofthecombinedmechanism.B23AC14khdaw.com55Fig9-1解:(1)12BCLinkABCamRRPMechanism(2)此机构为串联机构。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date9-2InthecombinedgeartrainshowninFig9-2,thegear1isthedriver,thelink6isanoutput.(1)Analyzethemotiontransmissionrouteanddrawitsstructuralblockdiagram.(2)Identifythecombinationpatternofthecombinedmechanism.2"n126khdaw.com5134Fig9-2解:(1)12=2"663530=4(2)所以此组合机构为反馈式的。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date9-3Inthegear-linkageshowninFig9-3,thecrankABisadriver.Theoutputpinion4islocatedontheshaftA.(1)Analyzethemotiontransmissionrouteanddrawitsstructuralblockdiagram.(2)Identifythecombinationpatternofthecombinedmechanism.5DA341khdaw.comB2CFig9-3解:(1)DifferentialB24LinkAB1RRRGear_train(2)所以此组合机构为并联的。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date9-4InthekinematicchainshowninFig.9-4,ifthedriveristhelink3insteadofthegear1,whilethegear5isstillanoutputgear.(1)Analyzethemotiontransmissionrouteanddrawitsstructuralblockdiagram.(2)Identifythecombinationpatternofthecombinedmechanism.Z6CZ1Z523khdaw.comB2311A4DFig9-4解:(1)1Crank-rockerDifferential6Mechanism2Gear-TrainDifferential31-2-65Gear-Train33-5-6(2)所以此组合机构为并联的。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date10-1Therearefourimbalancesinadisk-likerotorshowninFig10-1.Themasses,rotatingradiiandangularorientationsarelistedasfollows,m1=8kg,m2=10kg,m3=8kgandm4=7kg,r1=10mm,r2=10mm,r3=15mmandr4=20mm.TherotoristobebalancedbyremovingamassmCatarotatingradiusof25mm.FindthemagnitudemCanditslocationangleθC.m2r2=100m1r1=80khdaw.comm1m2r2r1r4r345°m4mcrc=402rcmcm3r3=120135°m3m4r4=140Fig10-1解:如图所示得mr=402Kgmm⋅cc∵r=25mmc∴m=402/25=2.26Kgckhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date10-2AmongthefollowingrotorsshowninFig10-1,rotorsa,b,c,darestaticallybalanced,rotorsb,c,aredynamicallybalanced.mrrrrrrrrmmmmLLLLLLkhdaw.com(a)(b)2mm3mrrrrr3m2rmLLLm1.5L1.5LFig10-2khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date10-3OnacircularrotatingdiskshowninFig10-3,therearetwocircularholes.d1=40mm,d2=50mm.Therotatingradiisoftheholecentersr1r2are100mmand140mm,respectively.ThelocationofthetwoholesareshowninFig10-3.Thediskistobebalancedbydrillingthethirdhole.Therotatingradiusofthethirdholecenteristober3=150mm.Findthediameterd3anditslocationangleθ3.d2r2rkhdaw.comm2230°r1m3r3d1mrr11m33Fig10-3解:如图所示,在1、2两位置挖孔相当于在圆盘对应位置有两个配重。π2π2πmr=ρdl=ρld=1600ρl=1600c1111444π2π2πmr=ρdl=ρld=2500ρl=1600c2222444c为一常数。22mr33=(∑miricosθi)+∑(msiniriθi)oo2oo2=(1600cos30c+2500cos270)c+(1600sin30c+2500sin270)c=2193ckhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnd=2193=46.83mm3⎛−msinrθ⎞17−1∑iii−10θ3=tg⎜⎟=tg()=−50.82⎜−mrcosθ⎟−83⎝∑iii⎠∵−msinrθ>0,−mrcosθ<0∑iii∑iii=0=0′′′θ129.1812910583khdaw.comkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date10-4Fourunbalancedmassesm1,m2,m3andm4isonfourtransverseplanesspacedequallyandparallel.Theirmass-radiusproductsarelistedasfollows:m1r1=3kgmm,m2r2=2kgmm,m3r3=5kgmm,andm4r4=4kgmm.TheirlocationsareshowninFig10-4.Supposethesystemistobebalancedfullybytwobalancingmass-radiusproducts,Pb1andPb3,ontheplanesIandIII,respectively.Determinetheamountsandangularlocationsofthetwobalancingmass-radiusproducts.Im2r2=2IIIym2m3r2rkhdaw.com3r1rm41m4xLLLm4r4=4Fig10-4IIII(mr)=244Iy(m2r2)I=1y(m2r2)III=1Pb3=52m1xmr=5m3r45ox333225or1m1r1=3P=32(mr)=6b144III解:将各质径积分别用I和III面上的两个质径积来平衡得到结果如图所示。得到Pb1=32Kgmm⋅0位于x轴成225位置处。P=52Kgmm⋅b30位于x轴成45位置处。khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date10-5Onthenon-diskrigidrotorshowninFig10-5,therearefourunbalancedmasses.Theirmasses,rotatingradiiandangularlocationsarelistedasfollows:m1=10kg,m2=15kg,m3=20kgandm4=10kg,r1=40mm,r2=30mm,r3=20mmandr4=30mmandθ1=120°,θ2=240°,θ3=300°andθ4=30°.L12=L23=L34.ThesystemistobebalanceddynamicallybyaddingamassmAonthebalancingplaneAatarotatingradiusrAof50mmandremovingamassmBonthebalancingplaneBatarotatingradiusrBof60mm.Determinethemagnitudes(mAandmB)andangularlocations(θAandθB)oftherequiredmasses.ABm1mYkhdaw.com11m4m4r1r44r3Xm23m3r3m22m2L12L23L34Fig10-5解:将各质径积分别用A和B面上的两个质径积来平衡得到结果如图所示。ABmr1=400yy1θ(m4r4)B=3001θ1rθAθxmAA4θ4xθθ23θ2θ3θBP=32b1(m3r3)A=400/3(m3r3)B=800/3(m2r2)A=300(m2r2)B=150khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cn22mrAA=(∑(miriA)cosθi)+(∑(miriA)sinθi)oo400o2(400cos120+300cos240+cos300)3=oo400o2+(400sin120+300sin240+sin300)322=(−283.33+−)28.86(=284.80)Kgmm⋅m=5.70Kgkhdaw.comA−1⎛∑(miriA)sinθi⎞−1−28.860θ=tg⎜⎟=tg()=5.82A⎜∑(mr)cosθ⎟−283.33⎝iiAi⎠∵∑(miriA)sinθi<0,∑(miriA)cosθi<000θ=185.82=1854858′′′A−1⎛∑(miriB)sinθi⎞−1−210.840θ=tg⎜⎟=tg()=−33.53B⎜∑(mr)cosθ⎟318.14⎝iiBi⎠∵∑(miriB)sinθi<0,∑(miriB)cosθi>000θ=326.47=3262759′′′′A22mrBB=(∑(miriB)cosθi)+(∑(miriB)sinθi)o800oo2(150cos240+cos300+300cos30)3=o800oo2+(150sin240+sin300+300sin30)322=(318.14+−)210.84(=381.67)Kgmm⋅m=6.36KgBkhdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date11-1Aslider-crankmechanismdrivenbyapairofgearsisshowninFig11-1.Z1=20,Z2=60.Themomentofinertiaofthepinion1aboutitscenterofmassAisJ21=0.15kgm.Themomentofinertiaofthegear2aboutitscenterofmassBisJ22=1.8kgm.ThelengthofthecrankBCis100mm.ThemassofcouplerCDism3=10kg.ItscenterofmassislocatedatthemiddleofCD.ItsmomentofinertiaaboutitscenterofmassisJ23=1kgm.Themassofslider4ism4=5kg.TheresistantforceF4actsonslider4.F4=25kN.Takethepinion1astheequivalentlink.FindtheequivalentresistantmomentofforceMrofF4andtheequivalentmomentofinertiaJofthewholemechanisminthepositionshowninthefollowingdiagram.解:khdaw.comϖ1z260i===12ϖz20212ϖ1ϖ=243F4ABDϖ=0135vC4=lBC⋅ϖ23l⋅ϖ=BC1C3l⋅ϖBC1v=C3Fig11-13⎛v⎞l1004BCM=F⎜⎟=F⋅=25*=833.33Nm⋅r44ω33⎝1⎠22n⎡⎛v⎞⎛ω⎞⎤CiJ=∑⎢m⎜i⎟+J⎜⎟⎥iCii=1⎢⎝ω1⎠⎝ω1⎠⎥⎣⎦2222⎛ϖ⎞⎛ϖ⎞⎛v⎞⎛v⎞23C3C4=J+J⎜⎟+J⎜⎟+m⎜⎟+m⎜⎟12334ϖϖϖϖ⎝1⎠⎝1⎠⎝1⎠⎝1⎠222⎛⎞1⎛lBC⎞⎛lBC⎞=0.151.8+×⎜⎟++010×⎜⎟+×5⎜⎟⎝⎠3⎝3⎠⎝3⎠222⎛⎞1⎛0.1⎞⎛0.1⎞2=0.151.8+×⎜⎟+10×⎜⎟+×5⎜⎟=0.367Kgm⋅⎝⎠3⎝3⎠⎝3⎠khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date11-2AplanetarygeartrainwithtwoplanetsisshowninFig11-2.Themoduleofallthegearsism.ThenumbersofteethareZ1,Z2,andZ3,respectively.Themomentsofinertiaofthelinks(abouttheircentersofmass)areJ1,J2,andJH.Themassofaplanetism2.(Allgearsarestandardgears.)TheresistantmomentofforceMHactsontheplanetcarrierH.Takegear1astheequivalentlink.FindtheequivalentresistantmomentofforceMrofMHandtheequivalentmomentofinertiaJofthewholegeartrain.解:1,2,3,H组成一行星轮系,得:mz(3−z2)mz(1+z2)MHH2∵=khdaw.com22OHO11∴z=2z+z321Hn1−nHz3i==−13n−nz3H1∵n=0Fig11-23nzϖ∴H=1=Hnz+zϖ1131z=12(z1+z2)mz(+z)12v=⋅ϖC2H2vmz(+z)zmzC21211=⋅=ϖ2z+z4113vϖ=C22mz/22ϖ2mz(1+z2)z12=⋅⋅ϖ2z+zmz1132zz+zz=1⋅12=1z+zz2z1322khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cn⎛ω⎞zM=M⎜H⎟=M⋅1rHH⎝ω⎠z+z113z=M⋅1H2(z+z)1222n⎡⎛v⎞⎛ω⎞⎤CiiJ=∑⎢mi⎜⎟+JC⎜⎟⎥ωiωi=1⎢⎣⎝1⎠⎝1⎠⎥⎦222khdaw.com⎛ϖ⎞⎛ϖ⎞⎛v⎞=J+J⎜2⎟+J⎜H⎟+2m⎜C2⎟12H2ϖϖϖ⎝1⎠⎝1⎠⎝1⎠222⎛z⎞⎛z⎞⎛mz⎞111=J+J⎜⎟+J⎜⎟+2m⎜⎟122zH⎜2(z+z⎟)24⎝2⎠⎝12⎠⎝⎠khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date11-3TheresistantmomentMrofamachineontheequivalentlinkisagivenfunctionoftherotatingangleφasshowninFig11-3.TheangularperiodofmomentφTis2π.TheinputmomentMdisconstant.(1)CalculatetheinputmomentMd.(2)Calculatethemaximumincrementofwork∆Wmax.(3)Theaveragespeedisnm=620r/min.Theallowablecoefficientofspeedfluctuation[δ]is0.01.Massesandmomentsofinertiaofallthelinksareneglected.FindtheminimummomentofinertiaoftheflywheelJFontheequivalentlink.khdaw.comMr100NmMdφ25NmTφ03ππ6π7π2π444Fig11-3解:(1)2πππ2πM=Mdϕ=⋅M=×100Nm⋅d∫rr022M=25(Nm⋅)d(3)动量变化图如下图所示:由图可见3π75ϕ=⇒W=W=πmax447π25ϕ=⇒W=W=−πmax44khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.DateEE75πmax=Eo+450Eo+4πφφTEminEoφEoEoφEmaxEmin=-25πkhdaw.comEo475⎛25⎞∴∆W=W−W=π−−⎜π⎟=25π=78.54Nm⋅maxmaxmin4⎝4⎠(3)2πnπnmmϖ==m6030∆Wmax∆Wmax78.54900×2J====1.86Kgm⋅F2222ϖm[]δ⎛πnm⎞π×620×0.01⎜⎟[]δ⎝30⎠khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.DateEx.11-4Inamechanicalsystemrunningataperiodicandstablespeed,arotatinglinkisselectedasanequivalentlink.TheequivalentinputmomentMdandtheequivalentresistantmomentMrontheequivalentlinkaregivenfunctionsoftherotatingangleφasshowninFig11-4.Theworksofthesomephasesare:F2=1000Nm,F3=800Nm,F4=700Nm,F5=1000Nm,F6=900Nm,F7=400Nm,respectively.Therefore,F1=400Nm.Themaximumincrementofwork∆Wmax=1100Nm.IftheequivalentmomentofinertiaJeisconstant,thenthemaximumspeedoftheequivalentlinkwilltakeplaceatg,theminimumspeedoftheequivalentlinkwilltakeplaceatc.khdaw.comMr-1000-700Md-900+400+800+1000+400abcdeghi0TFig11-4E0+500E0+400E0+200cehE0E0abdgiE0-400E0-500E0-600khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date12-1Listanddrawtheschematicdiagramsoffourmechanismswhichhavelessthan4linksandcantransformacontinuousrotationintoanoscillation.Givenameofeachmechanism.E3CCB2khdaw.com2B34114ADA曲柄摇杆机构摆动导杆机构AAEHIBωJGOTrPIOJωGH滚子摆动从动件盘形凸轮机构平底摆动从动件盘形凸轮机构khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.hackshp.cnNameClassStudentNo.Date12-2Listanddrawtheschematicdiagramsoffourmechanismswhichhavelessthan4linksandcantransformacontinuousrotationintoatranslationbackandforth.Givenameofeachmechanism.XBB2φ12C1Rkhdaw.comAEωC4A343曲柄滑块机构正弦机构A32BBωooω1对心平底直动从动件盘形凸轮机构偏置滚子直动从动件盘形凸轮机构khdaw.com若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com'
您可能关注的文档
- 机械原理 第七版 (吴克坚 著) 高等教学出版社 二到八章 课后答案
- C程序设计 第四版 (谭浩强 著) 清华大学出版社 课后答案
- 大学物理简明教程 第三章 (吕金钟 著) 清华大学出版社 习题参考答案
- c程序设计 李玲玲 课后答案[1-8章].khda
- 工程热力学 (吴家正 著) 中国建筑工业出版社 课后答案
- C程序设计(第四版)谭浩强_课后习题答案_共11章
- 新视野大学英语读写教程 第四册 (郑树棠 著) 外语教学与研究出版社 课后答案
- 大学物理教程 第三版 上册 (贾瑞皋 著) 科学出版社 课后答案
- C语言程序设计 (曹计昌 卢萍 李开 著) 科学出版社 课后答案
- 大学物理实验 (杜旭日 著) 厦门大学出版社 课后答案
- 工程热力学 第四版 (康廉明 著) 中国建筑工程学院 课后答案 复习提纲(A08建环)
- 大学物理实验 (王宏波 著) 东北林业大学出版社 课后答案
- 新视野大学英语读写教程 第一版 第三册 (郑树棠 著) 外语教学与研究出版社 课后答案
- C语言程序设计 (陈明晰 著) 中国铁道出版社 课后答案
- 工程热力学 第四版 (康廉明 著) 中国建筑工程学院 课后答案
- 大学物理实验 (王小平 著) 机械工业出版社 课后答案
- C语言程序设计 (顾志华 陈天煌 著) 机械工业出版社
- 机械原理课后练习答案
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明