

- 207.85 KB
- 2022-04-22 11:23:02 发布


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'课后答案网:www.hackshp.cn课后答案网您最真诚的朋友www.hackshp.cn网团队竭诚为学生服务,免费提供各门课后答案,不用积分,甚至不用注册,旨在为广大学生提供自主学习的平台!课后答案网:www.hackshp.cn视频教程网:www.efanjy.comPPT课件网:www.ppthouse.com课后答案网www.hackshp.cn若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn第二章作业及答案⎡06⎤At2.1用三种方法计算下列矩阵A的矩阵指数函数e。1)A=⎢⎥;⎣−1−5⎦解:At(1)用定义计算eAt122133e=+IAt+At+At+⋯2!3!⎡10⎤⎡06⎤1⎡-6-30⎤21⎡30114⎤3=⎢⎥+⎢⎥t+⎢⎥t+⎢⎥t+⋯⎣01⎦⎣−1−5⎦2⎣519⎦3!⎣-19-65⎦2323⎡13−t+5t+⋯6t−15t+19t+⋯⎤⎢⎥=⎢−+52−193+−+192+653+⎥ttt⋯15ttt⋯⎢⎣2626⎥⎦At(2)拉氏变换法计算e(注意求逆伴随矩阵计算能力)At−1−1e=L[(sI−A)]−1⎡s−6⎤−1=L⎢⎥⎣1s+5⎦⎡s+56⎤⎢⎥1⎡s+56⎤(s3)(+s+2)(s3)(+s+2)=−1=−1⎢⎥L⎢⎥Lss(+5)6+⎣−1s⎦⎢−1s⎥⎢⎥课后答案网⎣(s3)(+s+2)(s3)(+s+2)⎦⎡3266⎤−−⎢⎥=L−1⎢s+2s+3s+2s+3⎥⎢1132⎥−−⎣⎢s+3s+www.hackshp.cn2s+3s+2⎥⎦−2t−3t−2t−3t⎡3e−2e6e−6e⎤=⎢⎥−3t−2t−3t−2t⎣e−e3e−2e⎦At(3)待定系数法(凯莱-哈密尔顿Cayley-Hamilton法)计算e∵2λI−A=λ+5λ+6∴λ1=−3,λ2=−2At2n−1e=α()tI+α(t)A+α(t)A+⋯+α(t)A,根据凯莱-哈密尔顿定理,有012n−1eλit=α()t+α(t)λ+α(t)λ2+⋯+α(t)λn−1(注意:书上p42-43错!α后不01i2in−10应乘以I)1若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
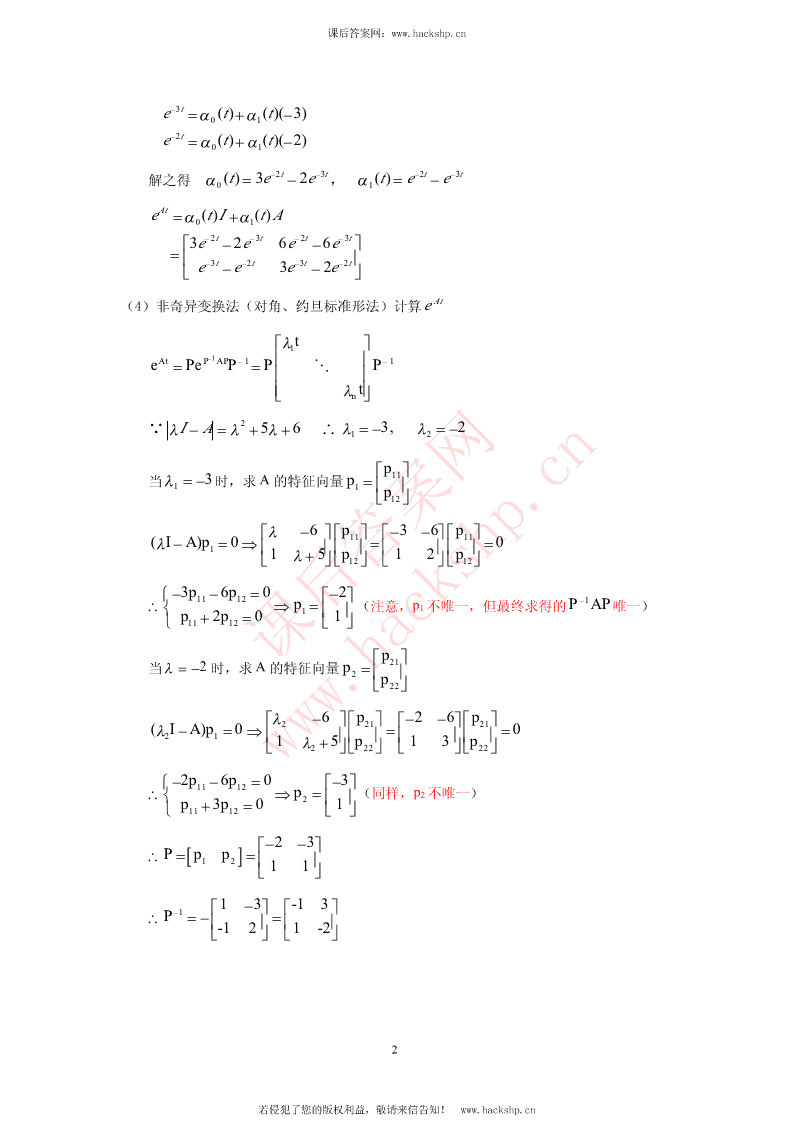
课后答案网:www.hackshp.cn−3te=α()t+α()(3)t−01−2te=α()t+α()(2)t−01−2t−3t−2t−3t解之得α()t=3e−2e,α()t=e−e01Ate=α()tI+α()tA01−2t−3t−2t−3t⎡3e−2e6e−6e⎤=⎢⎥−3t−2t−3t−2t⎣e−e3e−2e⎦At(4)非奇异变换法(对角、约旦标准形法)计算e⎡λ1t⎤AtPAP−1−1⎢⎥−1e=PeP=P⋱P⎢⎥⎢⎣λt⎥⎦n∵2λI−A=λ+5λ+6∴λ1=−3,λ2=−2⎡p11⎤当λ1=−3时,求A的特征向量p1=⎢⎥p⎣12⎦⎡λ−6⎤⎡p⎤⎡−3−6⎤⎡p⎤1111(IA)pλ−=⇒0⎢⎥⎢⎥=⎢⎥⎢⎥=01⎣1λ+5⎦⎣p⎦⎣12⎦⎣p⎦1212⎧−3p−6p=0⎡−2⎤1112−1∴⎨⇒p=⎢⎥(注意,p1不唯一,但最终求得的PAP唯一)1⎩p+2p=0⎣1⎦1112课后答案网⎡p21⎤当λ=−2时,求A的特征向量p=⎢⎥2p⎣22⎦⎡λ−6⎤⎡p⎤⎡−2−6⎤⎡p⎤22121(IA)pλ−=⇒0⎢⎥⎢⎥=⎢⎥⎢⎥=021⎣1λ+5⎦⎣p⎦⎣13⎦⎣p⎦www.hackshp.cn22222⎧−2p−6p=0⎡−3⎤1112∴⎨⇒p=⎢⎥(同样,p2不唯一)2⎩p+3p=0⎣1⎦1112⎡−2−3⎤∴=P[p1p2=]⎢⎥⎣11⎦⎡1−3⎤⎡-13⎤−1∴P=−⎢⎥=⎢⎥⎣-12⎦⎣1-2⎦2若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cnAtPAP−1−1⎡λ1t0⎤−1e=PeP=P⎢⎥P0λt⎣2⎦−2t−3t−2t−3t⎡−2−3⎤⎡−3t0⎤⎡-13⎤⎡3e−2e6e−6e⎤=⎢⎥⎢⎥⎢⎥=⎢⎥−3t−2t−3t−2t⎣11⎦⎣0−2t⎦⎣1-2⎦⎣e−e3e−2e⎦⎡λ1t⎤⎢⎥(注意:P中一列对应的特征向量应与⋱相对应)⎢⎥⎢⎣λt⎥⎦n⎡01⎤⎡1⎤ẋ=⎢⎥x+⎢⎥u2.3已知系统方程如下,⎣−6−5⎦⎣0⎦,求输入和初值为以下值时的状态响应和y=[1−1x]⎡1⎤输出响应。3)u(t)=1(t),x(0)=⎢⎥⎣1⎦At解:首先求状态转移矩阵,采用拉氏变换法求取e,则At−1−1e=L[(sI−A)]−2t−3t−2t−3t(注意:该题eAt与上题不一致)⎡3e−2ee−e⎤=⎢⎥−2t−3t−3t−2t⎣−6e+6e3e−2e⎦t本题中,t=0,因此,根据公式xt()=eA(tt)−0x+eAt(−τ)bu()ττd得(注意:书上p470t∫0t0错!积分项e的次幂应该没有负号课后答案网)tAt−At(−τ)xt()=ex+ebu()ττd0∫0⎡1⎤当u(t)=1(t),x(0)=⎢⎥时www.hackshp.cn⎣1⎦tAtAt(−τ)xt()=ex+ebu()ττd0∫0−2t−3t−2t−3t−2(t−τ)−3(t−τ)−2(t−τ)−3(t−τ)⎡3e−2ee−e⎤⎡⎤1t⎡3e−2ee−e⎤⎡⎤1=⎢⎥⎢⎥+⎢⎥⎢⎥××1dτ−2t−3t−2t−2t∫0−2(t−τ)−3(t−τ)−3(t−τ)−2(t−τ)⎣−6e+6e−2e+3e⎦⎣⎦1⎣−6e+6e3e−2e⎦⎣⎦0−2t−3tt−2(t−τ)−3(t−τ)⎡4e−3e⎤⎡3e−2e⎤=⎢−2t−3t⎥+∫⎢−2(t−τ)−3(t−τ)⎥dτ⎣−8e+9e⎦⎣−6e+6e⎦0t⎡⎤−2(t−τ)−3(t−τ)⎢∫(3e−2e)dτ⎥−2t−3t⎡4e−3e⎤⎢0⎥=⎢⎥+−8e−2t+9e−3t⎢t⎥⎣⎦−2(t−τ)−3(t−τ)⎢∫(6−e+6e)dτ⎥⎣⎢0⎥⎦3若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cnt⎡⎤−2t2τ−3t3τ⎢∫(3e⋅e−2e⋅e)dτ⎥−2t−3t⎡4e−3e⎤⎢0⎥=⎢⎥+−8e−2t+9e−3t⎢t⎥⎣⎦−2t2τ−3t3τ⎢∫(-6e⋅e+6e⋅e)dτ⎥⎢⎣0⎥⎦⎡⎤−2t12τ−3t13τ⎢(3e⋅e−2e⋅e)⎥t⎡4e−2t−3e−3t⎤⎢23τ=0⎥=⎢⎥+⎢⎥−2t−3t⎣−8e+9e⎦⎢11⎥−2t2τ−3t3τ⎢(-6e⋅e+6e⋅e)t⎥⎢⎣23τ=⎦⎥0⎡−2t12t−3t13t−2t1−3t1⎤⎡4e−2t−3e−3t⎤⎢(3e⋅2e−2e⋅3e)(3−e⋅−22e⋅3)⎥=⎢⎥+⎢⎥−2t−3t⎣−8e+9e⎦⎢−2t12t−3t13t−2t1−3t1⎥(-6e⋅e+6e⋅e)(-6−e⋅+6e⋅)⎣⎢2323⎥⎦−2t−3t⎡323−2t2−3t⎤⎡4e−3e⎤(−)(−e−e)=⎢⎥+⎢2323⎥−2t−3t⎢⎥⎣−8e+9e⎦−2t−3t⎣(-32)+−(-3e+2e)⎦−2t−3t⎡53−2t2−3t⎤⎡4e−3e⎤−e+e=+⎢⎥⎢−−2t+−3t⎥⎢623⎥⎣8e9e⎦−1+3e−2t-2e−3t⎣⎦⎡55−2t7−3t⎤+e−e=⎢⎥623⎢−2t课后答案网−3t⎥⎣−1-5e+7e⎦1115−2t28−3tyt()=[1−1()xt]=+e−e(注意计算能力)623www.hackshp.cn−2t⎡1⎤⎡e⎤x()0=⎢⎥时x()t=⎢−2t⎥⎣−1⎦⎣−e⎦2.5对线性定常系统ẋ=Ax()t,已知−t⎡2⎤⎡2e⎤x()0=⎢⎥时x()t=⎢−t⎥⎣−1⎦⎣−e⎦求系统矩阵A。t解:本题中,t=0,b=0,根据公式xt()=eA(tt)−0x+eAt(−τ)bu()ττd0t∫0t0At得xt()=ex(0)因此,根据已知条件,可以写出下列方程4若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn−2t−t⎡e2e⎤⎡12⎤At⎢⎥=e⎢⎥−2t−t⎣−e-e⎦⎣−1−1⎦⎡e−2t2e−t⎤⎡12⎤−1⎡2e−t−e−2t2e−t−2e−2t⎤At∴e=⎢⎥⎢⎥=⎢⎥−2t−t−t−2t−t−2t⎣−e-e⎦⎣−1−1⎦⎣-e+e-e+2e⎦dAtAt∵线性定常系统有Φ−̇(tt)=A(tΦ−t),Φ(t−t)=I(可由(e)=Ae证出)0000dtdAt⎡02⎤∴A=e=⎢⎥t=0dt0⎣−1−3⎦T2.7给定系统ẋ=At)(x和其伴随方程ż=−A(t)z,其状态转移矩阵分别用Φ(,tt)和0TΦ(,tt)表示,证明:Φ(,tt)Φ(,tt)=I。z00z0证明:−1Φ(tt,0Φ)tt,(0=)I由⇒Φ(tt,Φ)tt(,=I)−100Φ(tt,0)=Φtt0(,)对t求导:Φ̇(tt,Φ)tt(,+Φ)tt,(Φ̇tt,)=(0)0000根据定义2.2(书上p48):线性时变系统Φ满足Φ̇(t,t)=A(t)(t,t)Φ、Φ(t,t)=I0000⇒At()Φtt(,Φ)tt,(+Φ)tt,Φ̇(tt,=)0()0课后答案网000⇒At()+Φtt,(Φ̇)tt,(=0)00−1⇒Φ̇(tt,=−Φ)tt,(At=−Φ)()ttAt,()()000TTwww.hackshp.cnT⇒Φ̇(tt,)=−AtΦ()tt,()00TT又因为Φ(tt,=)I,根据Ż=−A()tZ可得00TTΦ̇(tt0,是)ż=−A(t)z的状态转移矩阵TT即:Φ(t,t)=Φt,t(得:)Φ(t,t=Φ)t,t()Z00Z00T所以Φ(tt,Φ)tt,(=Φ)tt,Φ(tt,)=I()0Z000注意:该题证明利用的是线性时变系统Φ满足Φ̇(t,t)=A(t)(t,t)Φ、Φ(t,t)=I以0000及状态转移矩阵的性质,传递性、反逆性。5若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn2.10已知如下离散时间系统,试求u(k),使系统能在第二个采样时刻转移到原点。⎡15.0⎤⎡3.0⎤⎡⎤1x(k+1)=⎢⎥x(k)+⎢⎥u(k),x(0)=⎢⎥(注意:书上没给x(0),应给出)⎣01.0⎦⎣4.0⎦⎣⎦1解:⎡10.5⎤⎡0.3⎤⎡1.5⎤⎡0.3⎤x(1)=⎢⎥x(0)+⎢⎥u(0)=⎢⎥⎢+⎥u(0)⎣00.1⎦⎣0.4⎦⎣0.1⎦⎣0.4⎦⎡10.5⎤⎡0.3⎤⎡⎤0⎡10.5⎤⎡⎛1.5⎤⎡0.3⎤⎞⎡0.3⎤x(2)=⎢⎥x(1)+⎢⎥u(1)=⎢⎥=⎢⎥⎢⎜⎥⎢+⎥u(0)⎟+⎢⎥u(1)⎣00.1⎦⎣0.4⎦⎣⎦0⎣00.1⎦⎣⎝0.1⎦⎣0.4⎦⎠⎣0.4⎦⎡1.550.5u(0)++0.3u(1)⎤⎡⎤0=⎢⎥=⎢⎥⎣0.010.04u(0)0.4u(1)++⎦⎣⎦0解上述方程,得:u(0)=−3.28;u(1)=0.303(注意:x(0)不同,求得的u也不同。⎡⎤1若已知条件设为x(0)=⎢⎥⎣⎦241737则u(0)=−4.436;u(1)=0.393,或者u(0)=−;u(1)=)9494课后答案网www.hackshp.cn6若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn'
您可能关注的文档
- 大学英语创意阅读 第三册 ((英)格林 著) 上海外语教育出版社 全文翻译
- Java程序设计 第二版 (朱喜福 徐剑魁 著) 清华大学出版社 课后答案1
- 基于运算放大器和模拟集成电路设计 (赛尔吉欧.佛朗歌[美] 著) 西安交通大学出版社 课后答案 [基于运算放大器与模拟集成电路设计[1].答案].chapter03_142
- 基于运算放大器和模拟集成电路设计 (赛尔吉欧.佛朗歌[美] 著) 西安交通大学出版社 课后答案 [基于运算放大器与模拟集成电路设计[1].答案].chapter04_532
- 信号与系统重点综述与习题详解 (刘泉 江雪梅 著) 高等教育出版社 课后答案
- 大学英语创意阅读 第一册 (薛金星 著) 东北师范大学出版社 课后答案
- 基于运算放大器和模拟集成电路设计 (赛尔吉欧.佛朗歌[美] 著) 西安交通大学出版社 课后答案 [基于运算放大器与模拟集成电路设计[1].答案].chapter05_109
- 信号与线性系统 第二版 (阎鸿森 著) 西安交通大学出版社 课后答案
- JAVA程序设计基础 (张晓龙 著) 清华大学出版社 课后答案
- JAVA程序设计基础 吴小东 著 清华大学出版社 (吴小东 著) 清华大学出版社 课后答案
- 基于运算放大器和模拟集成电路设计 (赛尔吉欧.佛朗歌[美] 著) 西安交通大学出版社 课后答案 [基于运算放大器与模拟集成电路设计[1].答案].chapter06_117
- 大学英语创意阅读2 (Ian Smallwood 著) 上海外语教育出版社 翻译译文
- Java程序设计课后练习答案
- 大学英语泛读 第三版 第二册 (张砚秋 著) 外研社 课后答案 泛读1答案Unit1-2
- Java程序设计实用教程 (胡伏湘 著) 清华大学出版 课后答案
- 基于运算放大器和模拟集成电路设计 (赛尔吉欧.佛朗歌[美] 著) 西安交通大学出版社 课后答案 [基于运算放大器与模拟集成电路设计[1].答案].chapter07_503
- 大学英语泛读 第三版 第二册 (张砚秋 著) 外研社 课后答案 泛读1答案Unit1-6
- 基于运算放大器和模拟集成电路设计 (赛尔吉欧.佛朗歌[美] 著) 西安交通大学出版社 课后答案 [基于运算放大器与模拟集成电路设计[1].答案].chapter08_266
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明