

- 109.46 KB
- 2022-04-22 11:32:01 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
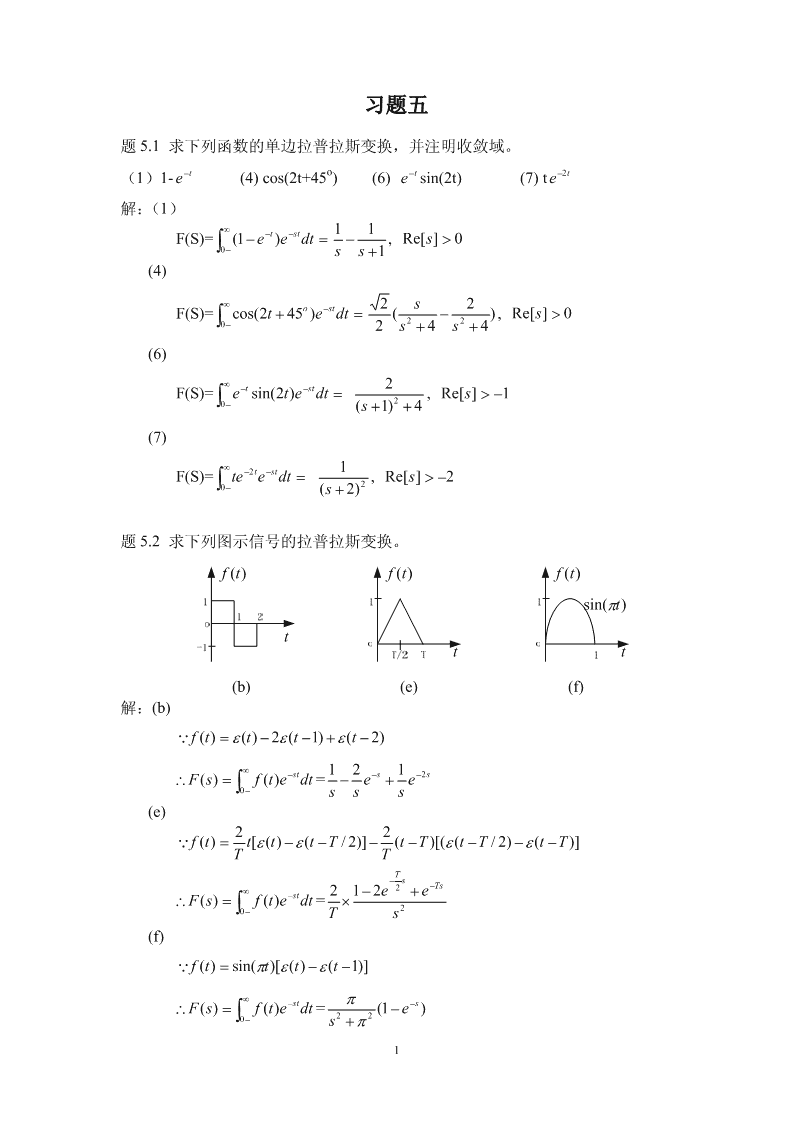
'习题五题5.1求下列函数的单边拉普拉斯变换,并注明收敛域。−to−t−2t(1)1-e(4)cos(2t+45)(6)esin(2t)(7)te解:(1)∞−t−st11F(S)=∫(1−e)edt=−,Re[s]>00−ss+1(4)∞o−st2s2F(S)=cos(2t+45)edt=(−),Re[s]>0∫0−2s2+4s2+4(6)∞2−t−stF(S)=esin(2t)edt=,Re[s]>−1∫0−(s+1)2+4(7)∞1−2t−stF(S)=teedt=,Re[s]>−2∫0−(s+2)2题5.2求下列图示信号的拉普拉斯变换。f(t)f(t)f(t)sin(πt)ttt(b)(e)(f)解:(b)Qf(t)=ε(t)−2ε(t−1)+ε(t−2)∞−st12−s1−2s∴F(s)=∫f(t)edt=−e+e0−sss(e)22Qf(t)=t[ε(t)−ε(t−T/2)]−(t−T)[(ε(t−T/2)−ε(t−T)]TTT−s2−Ts∞−st21−2e+e∴F(s)=f(t)edt=×∫0−Ts2(f)Qf(t)=sin(πt)[ε(t)−ε(t−1)]∞π−st−s∴F(s)=f(t)edt=(1−e)∫0−s2+π21
题5.3利用常用函数的象函数及拉普拉斯变换的性质,求下列信号的拉普拉斯变换。t−t(2)e[ε(t)−ε(t−2)](7)sin(2t−π/4)ε(t)(9)∫sin(πx)dx02d−(t−3)−αt(11)[sin(πt)ε(t)](15)teε(t−1)(16)tecos(βt)ε(t)2dt解:(2)11−2sQLT[ε(t)]=,∴LT[ε(t−2)]=ess−t1−2(s+1)∴LT{e[ε(t)−ε(t−2)]}=(1−e)s+1(7)1Qsin(2t−π/4)ε(t)=[sin(2t)−cos(2t)]ε(t)212s∴LT[sin(2t−π/4)ε(t)]=(−)222s+4s+4(9)πttQLT[sin(πt)ε(t)]=,sin(πx)dx=sin(πx)ε(x)dxs2+π2∫0∫−∞t1π∴LT[sin(πx)dx]=×∫0ss2+π2(11)πQLT[sin(πt)ε(t)]=22s+π22dsπ∴LT{[sin(πt)ε(t)]}=222dts+π(15)11−s−t1−(s+1)QLT[ε(t)]=,∴LT[ε(t−1)]=e,∴LT[eε(t−1)]=esss+1−(t−3)3d1−(s+1)s+2−(s−2)∴LT[teε(t−1)]=−e[e]=e2dss+1(s+1)(16)s−αts+αQLT[cos(βt)ε(t)]=∴LT[ecos(βt)ε(t)]=,2222s+β(s+α)+β22−αtds+α(s+α)−β∴LT[tecos(βt)ε(t)]=−[]=22222ds(s+α)+β[(s+α)+β]2
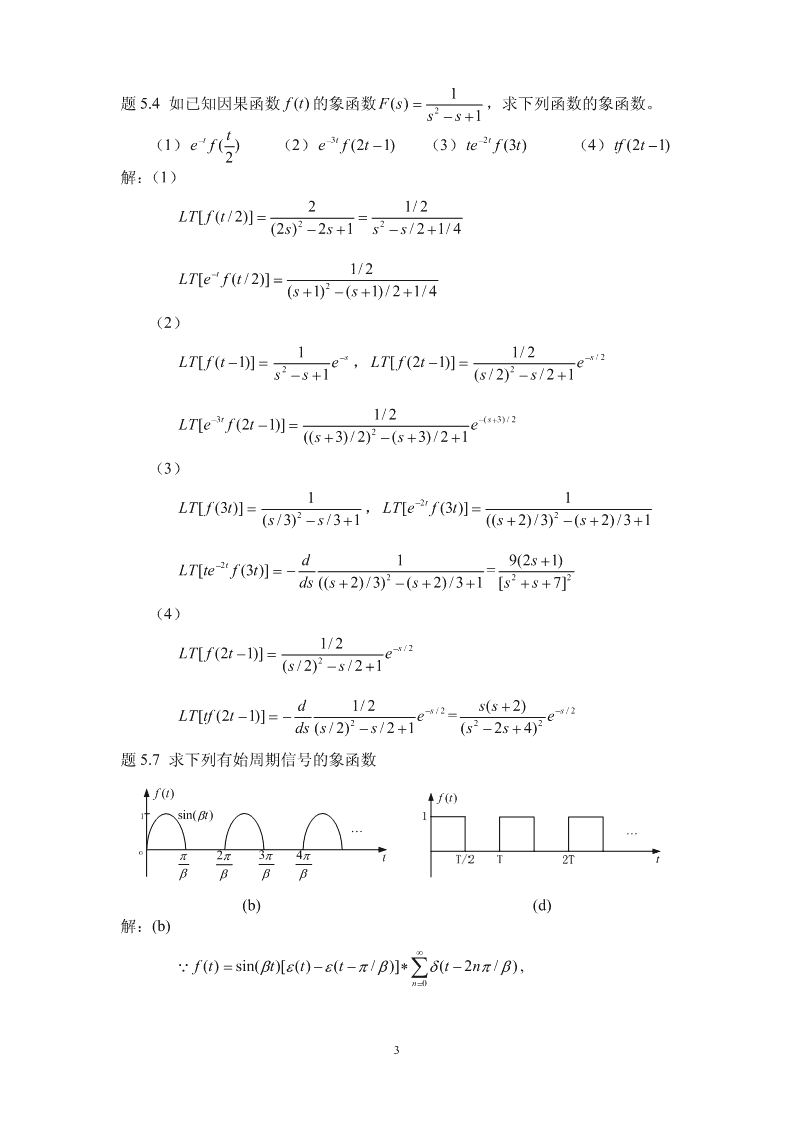
1题5.4如已知因果函数f(t)的象函数F(s)=,求下列函数的象函数。2s−s+1−tt−3t−2t(1)ef()(2)ef(2t−1)(3)tef(3t)(4)tf(2t−1)2解:(1)21/2LT[f(t/2)]==22(2s)−2s+1s−s/2+1/4−t1/2LT[ef(t/2)]=2(s+1)−(s+1)/2+1/4(2)1−s1/2−s/2LT[f(t−1)]=e,LT[f(2t−1)]=e22s−s+1(s/2)−s/2+1−3t1/2−(s+3)/2LT[ef(2t−1)]=e2((s+3)/2)−(s+3)/2+1(3)1−2t1LT[f(3t)]=,LT[ef(3t)]=22(s/3)−s/3+1((s+2)/3)−(s+2)/3+1−2td19(2s+1)LT[tef(3t)]=−=222ds((s+2)/3)−(s+2)/3+1[s+s+7](4)1/2−s/2LT[f(2t−1)]=e2(s/2)−s/2+1d1/2−s/2s(s+2)−s/2LT[tf(2t−1)]=−e=e222ds(s/2)−s/2+1(s−2s+4)题5.7求下列有始周期信号的象函数f(t)f(t)sin(βt)LLπ2π3π4πttββββ(b)(d)解:(b)∞Qf(t)=sin(βt)[ε(t)−ε(t−π/β)]∗∑δ(t−2nπ/β),n=03
π−sββ(1+e)LT{sin(βt)[ε(t)−ε(t−π/β)]}=,22s+β∞1LT[∑δ(t−2nπ/β)]=2π,−sn=0β1−e∞∴LT[f(t)]=LT{sin(βt)[ε(t)−ε(t−π/β)]}×LT[∑δ(t−2nπ/β)]n=0β1=22πs+β−sβ(1−e)(d)∞Qf(t)=[ε(t)−ε(t−T/2)]∗∑δ(t−nT)n=0T−1−e2s∞1LT[ε(t)−ε(t−T/2)]=,LT[∑δ(t−nT]=−Tssn=01−e∞1∴LT[f(t)]=LT[ε(t)−ε(t−T/2)]×LT[∑δ(t−nT)]=T−sn=0s(1+e2)题5.8求下列信号的拉普拉斯逆变换。21s+4s+52s+4(1)(3)(5)22(s+2)(s+4)s+3s+2s(s+4)解:(1)11/21/2Q=−,(s+2)(s+4)s+2s+4−11−11/21/21−2t−4t∴LT[]=LT[−]=(e−e)ε(t)(s+2)(s+4)s+2s+42(2)2s+4s+5s+321Q=1+=1+−22s+3s+2s+3s+2s+1s+22−1s+4s+5−t−2t∴LT[]=δ(t)+(2e−e)ε(t)2s+3s+2(3)2s+41s2−12s+4Q=−+,∴LT[]=(1−cos2t+sin2t)ε(t)2222s(s+4)ss+4s+4s(s+4)4
题5.9求下列象函数的拉普拉斯逆变换,粗略画出他们的波形图。−Ts−2(s+3)−s1−eeπ(1+e)(1)(3)(5)22s+1s+3s+π解:(1)−t1QLT[eε(t)]=,s+1−Ts−11−e−t−(t−T)∴f(t)=LT[]=eε(t)−eε(t−T)],画出波形图如下图(1)s+1(3)−2s−2(s+3)e−3teQLT[ε(t−2)]=,LT[eε(t−2)]=,ss+3−2(s+3)−1e−3t∴f(t)=LT[]=eε(t−2),画出波形图如下图(3)s+3(5)πQLT[sin(πt)ε(t)]=,22s+π−s−1π(1+e)∴f(t)=LT[]=sin(πt)ε(t)+sin(π(t−1))ε(t−1)22s+π=sin(πt)[ε(t)−ε(t−1)],画出波形图如下图(5)f(t)f(t)f(t)−6esin(πt)ttt(1)(3)(5)题5.15描述某LTI系统的微分方程为y′′(t)+3y′(t)+2y(t)=f′(t)+4f(t),求在下列条件下的系统的零输入响应和零状态响应。(1)f(t)=ε(t),y(0−)=0,y′(0−)=1解:(1)对原微分方程等式两边同时求单边拉普拉斯变换,令Y(s)=LT[y(t)],F(s)=LT[f(t)],结合单边拉普拉斯变换的时域微分性质有5
sy(0−)+y′(0−)+3y(0−)s+4Y(s)=+F(s),22s+3s+2s+3s+2sy(0−)+y′(0−)+3y(0−)111Y(s)===−,x22s+3s+2s+3s+2s+1s+2s+4s+41231Y(s)=F(s)=×=−+,f22s+3s+2s+3s+2sss+1s+2−1−t−2t∴y(t)=LT[Y(s)]=)[e−e]ε(t;xx−1−t−2t∴y(t)=LT[Y(s)]=)[2−3e+e]ε(tff题5.16描述某LTI系统的微分方程为y′′(t)+3y′(t)+2y(t)=f′(t)+4f(t),求在下列条件下的系统的零输入响应和零状态响应。−2t(2)f(t)=eε(t),y(0+)=1,y′(0+)=2解:(2)""−2t因为,零状态响应满足微分方程:y(t)+3y(t)+2y(t)=δ(t)+2eε(t),fff"所以,y(0+)=0,y(0+)=1;y(0−)=1,y′(0−)=1;ff对原微分方程等式两边同时求单边拉普拉斯变换,令Y(s)=LT[y(t)],F(s)=LT[f(t)],结合单边拉普拉斯变换的时域微分性质有sy(0−)+y′(0−)+3y(0−)s+4Y(s)=2+2F(s)s+3s+2s+3s+2sy(0−)+y′(0−)+3y(0−)s+432Y(s)===−,x22s+3s+2s+3s+2s+1s+2s+4s+41323Y(s)=F(s)=×=−−,f222s+3s+2s+3s+2s+2s+1(s+2)s+2−1−t−2t∴y(t)=LT[Y(s)]=)[3e−2e]ε(t;xx−1−t−2t∴y(t)=LT[Y(s)]=)[e−(2t+3)e]ε(tff题5.17求下列方程所描述系统的冲激响应h(t)和阶跃响应g(t)(1)y′′(t)+4y′(t)+3y(t)=f′(t)−3f(t)解:(1)对原微分方程等式两边同时求初始状态为零的单边拉普拉斯变换,令Y(s)=LT[y(t)],F(s)=LT[f(t)],ff6
Yf(s)s−3H(s)==,2F(s)s+4s+3s−31G(s)=LT[g(t)]=H(s)×LT[ε(t)]=×,2s+4s+3s−1−t−3th(t)=LT[H(s)]=[−2e+3e]ε(t),−1−t−3tg(t)=LT[G(s)]=[−1+2e−3e]ε(t)题5.18已知系统函数和初始状态如下,求系统的零输入响应y(t)xs+6(1)H(s)=,y(0−)=y′(0−)=12s+5s+6解:(1)Yf(s)s+6QH(s)==,2F(s)s+5s+62∴(s+5s+6)Y(s)=(s+6)F(s),等式两边求拉普拉斯逆变换得系统方程f为y′′(t)+5y′(t)+6y(t)=f′(t)+6f(t),则有y(t)满足微分方程:y′′(t)+5y′(t)+6y(t)=0,该式两边求拉普拉xxxx斯变换sy(0−)+y′(0−)+5y(0−)s+643得:Y(s)===−x22s+5s+6s+5s+6s+2s+3−1−2t−3t∴y(t)=LT[Y(s)]=)[4e−3e]ε(txx−2t题5.19已知LTI系统的阶跃响应g(t)=[1−e]ε(t),欲使系统的零状态响应为−2t−2ty(t)=[1−e+te]ε(t),求系统的输入信号f(t)。f−2t1121解:QG(s)=LT[g(t)]=LT[(1−e)ε(t)]=−==H(s)ss+2s(s+2)s2∴H(s)=,又s+2−2t−2tQY(s)=LT[y(t)]=LT[(1−e+te)ε(t)]ff111=−+=H(s)F(s)2ss+2(s+2)7
11/2−1−2t∴F(s)=+,∴f(t)=LT[F(s)]=(1+0.5e)ε(t)ss+2题5.22如图所示的复合系统,由4个子系统连接而成,各子系统的系统函数或11−2t冲激响应分别为:H(s)=,H(s)=,h(t)=ε(t),h(t)=eε(t),求1234s+1s+2复合系统的冲激响应h(t)。H(s)h(t)23f(t)y(t)H1(s)h4(t)∑解:QH(s)=LT[h(t)]=H(s)×[H(s)H(s)−H(s)]123411H(s)=LT[h(t)]=,H(s)=LT[h(t)]=3344ss+211111−s1/223/2∴H(s)=×(×−)==−+,s+1s+2ss+2s(s+1)(s+2)ss+1s+2−11−t3−2t∴h(t)=LT[H(s)]=(−2e+e)ε(t)22题5.28某LTI系统,在以下各种情况下初始状态相同。已知:当激励f(t)=δ(t)1−t−t时,其全响应y(t)=δ(t)+eε(t);当激励f(t)=ε(t)时,其全响应y(t)=3eε(t)。122−2t(1)如f(t)=eε(t),求系统的全响应y(t);33(2)如f(t)=t[ε(t)−ε(t−1)],求系统的全响应y(t)。44解:设系统的系统函数为H(s),系统零输入响应的象函数为Y(s),x1则:Y(s)=Y(s)+H(s)F(s)=Y(s)+H(s)=1+,1x1xs+113Y(s)=Y(s)+H(s)F(s)=Y(s)+H(s)=,2x2xss+112解得:H(s)=1−,Y(s)=;xs+1s+1(1)1QF(s)=LT[f(t)]=33s+212∴Y(s)=LT[y(t)]=Y(s)+H(s)F(s)=+,33x3s+1s+28
−1−t−2t∴y(t)=LT[Y(s)]=(e+2e)ε(t)33(2)−s−sse+e−1QF(s)=LT[f(t)]=−442s−s−s−s2sse+e−111e∴Y(s)=LT[y(t)]=Y(s)+H(s)F(s)=−=+−,44x42s+1s+1sss+11−1−t∴y(t)=LT[Y(s)]=(1+e)ε(t)−ε(t−1)449'
您可能关注的文档
- 会计基础实务(第二版)课后练习题答案.doc
- 会计基础课后习题答案及解析.doc
- 会计学习题及答案.doc
- 会计学答案.doc
- 会计理论章后习题参考答案(修订)_.doc
- 传播学教程第二版_课后习题答案.docx
- 体育概论复习题及答案.doc
- 保护生物学期末复习题及答案.doc
- 保险学习题(无答案)全部.doc
- 信息安全数学基础习题答案.pdf
- 信息安全概论习题答案.doc
- 信息安全课后习题2答案(段云所版).doc
- 信息检索习题以及答案.doc
- 信息检索习题及答案.doc
- 信息检索课后答案.doc
- 信托与租赁习题及答案.doc
- 修改附录 审计基础与实务 练习题参考答案.doc
- 先秦秦汉史题库答案(西南大学08级历史).doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明