

- 5.27 MB
- 2022-04-22 11:35:00 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
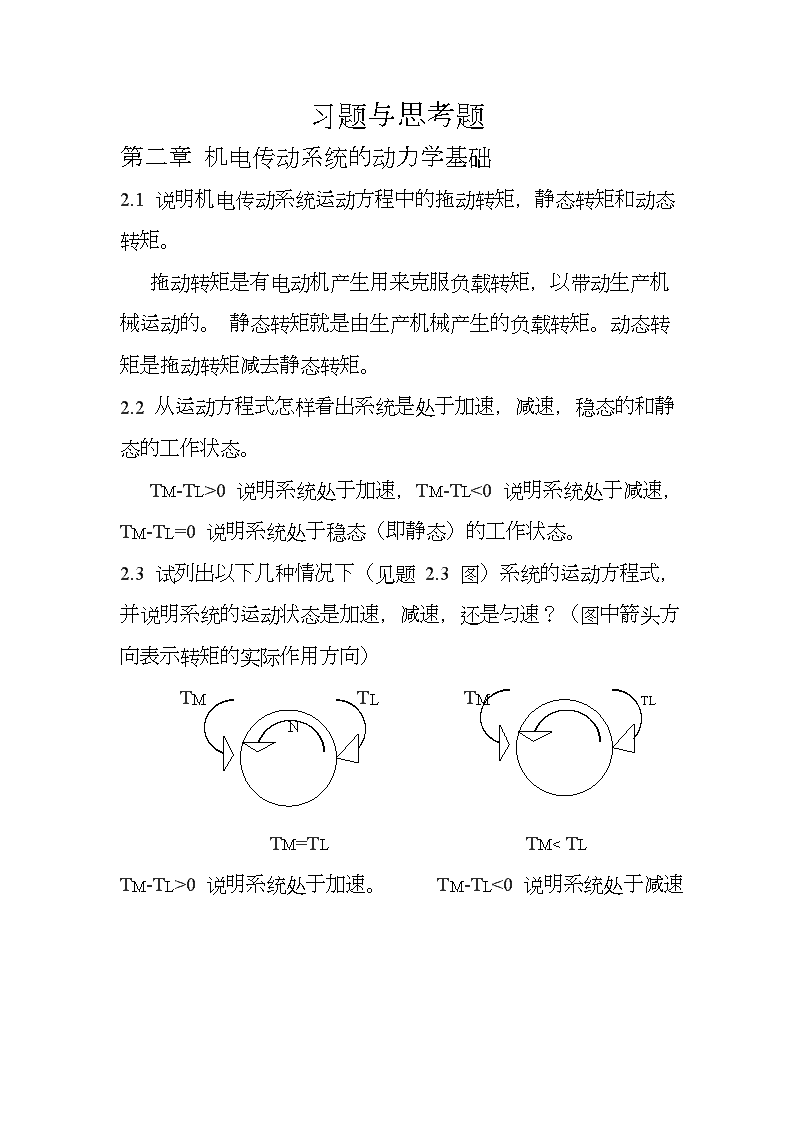
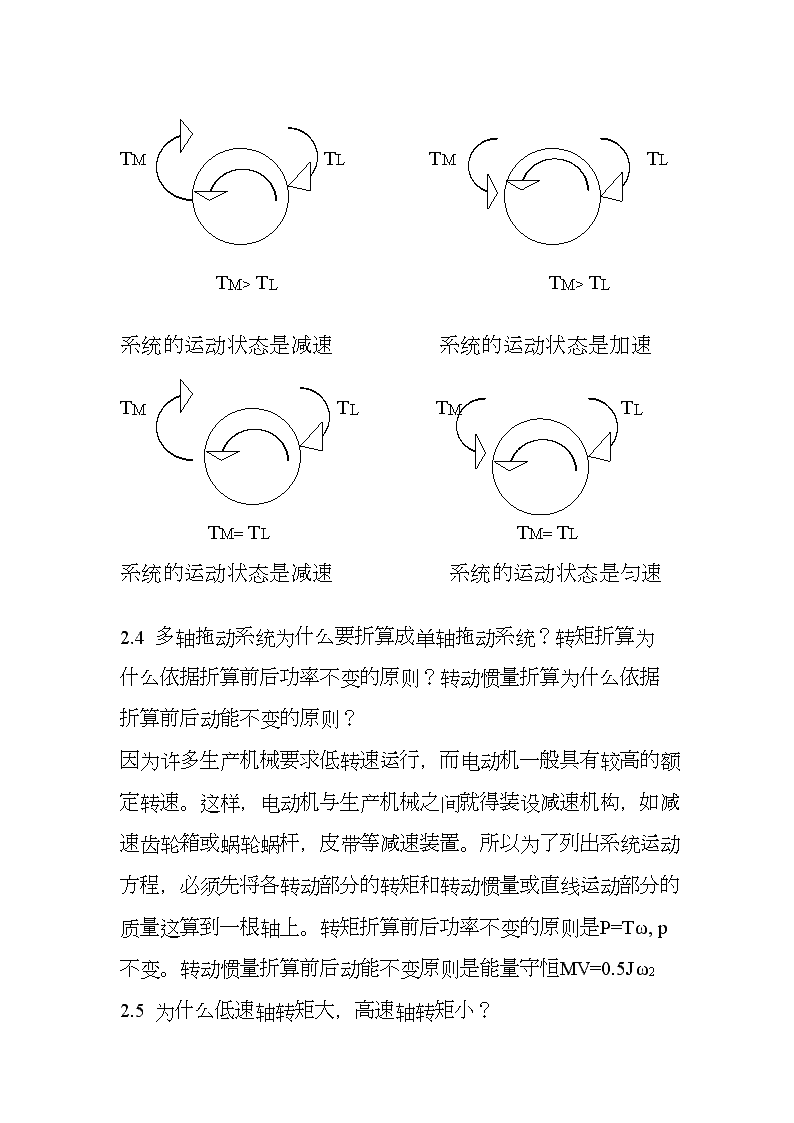
'习题与思考题第二章机电传动系统的动力学基础2.1说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。静态转矩就是由生产机械产生的负载转矩。动态转矩是拖动转矩减去静态转矩。2.2从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。TM-TL>0说明系统处于加速,TM-TL<0说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。2.3试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TMTLTMTLNTM=TLTM-TL>0说明系统处于加速。TMTL系统的运动状态是减速TM>TL系统的运动状态是加速TMTLTMTLTM=TL系统的运动状态是减速TM=TL系统的运动状态是匀速2.4多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。转矩折算前后功率不变的原则是P=Tω,p不变。转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩大,高速轴转矩小?
因为P=Tω,P不变ω越小T越大,ω越大T越小。2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375.P=ωG∂D2/375.,P不变转速越小GD2越大,转速越大GD2越小。2.7如图2.3(a)所示,电动机轴上的转动惯量JM=2.5kgm2,转速nM=900r/min;中间传动轴的转动惯量JL=16kgm2,转速nL=60r/min。试求折算到电动机轴上的等效专惯量。折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+JL/j12=2.5+2/9+16/225=2.79kgm2.2.8如图2.3(b)所示,电动机转速nM=950r/min,齿轮减速箱的传动比J1=J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力F=100N,电动机的费轮转距GD2M=1.05Nm2,齿轮,滑轮和卷筒总的传动效率为0.83。试球体胜速度v和折算到电动机轴上的静态转矩TL以及折算到电动机轴上整个拖动系统的飞轮惯量GD2z.。ωM=3.14*2n/60=99.43rad/s.提升重物的轴上的角速度ω=ωM/j1j2j3=99.43/4*4*2=3.11rad/sv=ωD/2=0.24/2*3.11=0.373m/sTL=9.55FV/ηCnM=9.55*100*0.373/0.83*950=0.45NMGD2Z=δGDM2+GDL2/jL2
=1.25*1.05+100*0.242/322=1.318NM22.9一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载?可分为1恒转矩型机械特性2离心式通风机型机械特性3直线型机械特性4恒功率型机械特性,4种类型的负载.2.10反抗静态转矩与位能静态转矩有何区别,各有什么特点?反抗转矩的方向与运动方向相反,,方向发生改变时,负载转矩的方向也会随着改变,因而他总是阻碍运动的.位能转矩的作用方向恒定,与运动方向无关,它在某方向阻碍运动,而在相反方向便促使运动。2.11在题2.11图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点?哪些不是?交点是系统的稳定平衡点.交点是系统的平衡点
交点是系统的平衡交点是系统的平衡点交点不是系统的平衡点
第三章3.1为什么直流电记得转子要用表面有绝缘层的硅钢片叠压而成?直流电机的转子要用表面有绝缘层的硅钢片叠加而成是因为要防止电涡流对电能的损耗..3.2并励直流发电机正传时可以自励,反转时能否自励?不能,因为反转起始励磁电流所产生的磁场的方向与剩余磁场方向相反,这样磁场被消除,所以不能自励.3.3一台他励直流电动机所拖动的负载转矩TL=常数,当电枢电压附加电阻改变时,能否改变其稳定运行状态下电枢电流的大小?为什么?这是拖动系统中那些要发生变化?T=KtφIau=E+IaRa当电枢电压或电枢附加电阻改变时,电枢电流大小不变.转速n与电动机的电动势都发生改变.3.4一台他励直流电动机在稳态下运行时,电枢反电势E=E1,如负载转矩TL=常数,外加电压和电枢电路中的电阻均不变,问减弱励磁使转速上升到新的稳态值后,电枢反电势将如何变化?是大于,小于还是等于E1?T=IaKtφ,φ减弱,T是常数,Ia增大.根据EN=UN-IaRa,所以EN减小.,小于E1.
3.5一台直流发电机,其部分铭牌数据如下:PN=180kW,UN=230V,nN=1450r/min,ηN=89.5%,试求:①该发电机的额定电流;②电流保持为额定值而电压下降为100V时,原动机的输出功率(设此时η=ηN)PN=UNIN180KW=230*ININ=782.6A该发电机的额定电流为782.6AP=IN100/ηNP=87.4KW3.6已知某他励直流电动机的铭牌数据如下:PN=7.5KW,UN=220V,nN=1500r/min,ηN=88.5%,试求该电机的额定电流和转矩。PN=UNINηN7500W=220V*IN*0.885IN=38.5ATN=9.55PN/nN=47.75Nm3.7一台他励直流电动机:PN=15KW,UN=220V,IN=63.5A,nN=2850r/min,Ra=0.25Ω,其空载特性为:
U0/V115184230253265If/A0.4420.8021.21.6862.10今需在额定电流下得到150V和220V的端电压,问其励磁电流分别应为多少?由空载特性其空载特性曲线.E2652532302201841501150.4420.710.8021.081.21.6862.10If当U=150V时If=0.71A当U=220V时If=1.08A3.8一台他励直流电动机的铭牌数据为:PN=5.5KW,UN=110V,IN=62A,nN=1000r/min,试绘出它的固有机械特性曲线。Ra=(0.50~0.75)(1-PN/UNIN)UN/IN=0.6(1-5500/110*62)*110/62
=0.206Ωn0=nNUN/(UN-INRa)=1131r/minTN=9.55*5500/1000=52.525Nm113152.5253.9一台并励直流电动机的技术数据如下:PN=5.5KW,UN=110V,IN=61A,额定励磁电流Ifn=2A,nN=1500r/min,电枢电阻Ra=0.2Ω,若忽略机械磨损和转子的铜耗,铁损,认为额定运行状态下的电磁转矩近似等于额定输出转矩,试绘出它近似的固有机械特性曲线。
n0=UNnN/(UN-INRa)=110*1500/(110-61*0.2)=1687r/minTN=9.55PN/nN=9.55*5500/1500=35Nm16873.10一台他励直流电动机的技术数据如下:PN=6.5KW,UN=220V,IN=34.4A,nN=1500r/min,Ra=0.242Ω,试计算出此电动机的如下特性:①固有机械特性;②电枢服加电阻分别为3Ω和5Ω时的人为机械特性;③电枢电压为UN/2时的人为机械特性;④磁通φ=0.8φN时的人为机械特性;并绘出上述特性的图形。①n0=UNnN/(UN-INRa)=220*1500/220-34.4*0.242=1559r/minTN=9.55PN/nN=9.55*6500/1500=41.38Nm
155941.38②n=U/Keφ-(Ra+Rad)T/KeKtφ2=U/Keφ-(Ra+Rad)T/9.55Ke2φ2当3Ωn=854r/min当5Ωn=311r/min③n=U/Keφ-RaT/9.55Ke2φ2
当UN=0.5UN时n=732r/minn0=UNnN/2(UN-INRa)=780r/min④n=U/0.8Keφ-RaT/9.55Ke2φ20.82当φ=0.8φ时n=1517r/minn0=UNnN/0.8Keφ=1964r/minn0
3.11为什么直流电动机直接启动时启动电流很大?电动机在未启动前n=0,E=0,而Ra很小,所以将电动机直接接入电网并施加额定电压时,启动电流将很大.Ist=UN/Ra3.12他励直流电动机直接启动过程中有哪些要求?如何实现?他励直流电动机直接启动过程中的要求是1启动电流不要过大,2不要有过大的转矩.可以通过两种方法来实现电动机的启动一是降压启动.二是在电枢回路内串接外加电阻启动.3.13直流他励电动机启动时,为什么一定要先把励磁电流加上?若忘了先合励磁绕阻的电源开关就把电枢电源接通,这是会产生什么现象(试从TL=0和TL=TN两种情况加以分析)?当电动机运行在额定转速下,若突然将励磁绕阻断开,此时又将出现什么情况?直流他励电动机启动时,一定要先把励磁电流加上使因为主磁极靠外电源产生磁场.如果忘了先合励磁绕阻的电源开关就把电枢电源接通,TL=0时理论上电动机转速将趋近于无限大,引起飞车,TL=TN时将使电动机电流大大增加而严重过载.
3.14直流串励电动机能否空载运行?为什么?串励电动机决不能空载运行,因为这时电动机转速极高,所产生的离心力足以将绕组元件甩到槽外,还可能串励电动机也可能反转运行.但不能用改变电源极性的方法,因这时电枢电流Ia与磁通φ同时反响,使电瓷转矩T依然保持原来方向,则电动机不可能反转.3.15一台直流他励电动机,其额定数据如下:PN=2.2KW,UN=Uf=110V,nN=1500r/min,ηN=0.8,Ra=0.4Ω,Rf=82.7Ω。试求:①额定电枢电流IAn;②额定励磁电流IfN;③励磁功率Pf;④额定转矩TN;⑤额定电流时的反电势;⑥直接启动时的启动电流;⑦如果要是启动电流不超过额定电流的2倍,求启动电阻为多少欧?此时启动转矩又为多少?①PN=UNIaNηN2200=110*IaN*0.8IaN=25A②Uf=RfIfNIfN=110/82.7
=1.33A③Pf=UfIfN=146.3W④额定转矩TN=9.55PN/nN=14Nm⑤额定电流时的反电势EN=UN-INRa=110V-0.4*25=100V⑥直接启动时的启动电流Ist=UN/Ra=110/0.4=275A⑦启动电阻2IN>UN/(Ra+Rst)Rst>1.68Ω启动转矩Ia=UN/(Ra+Rst)=52.9AKeφ=(UN-INRa)/nN=0.066T=KtIaφ=9.55*0.066*52.9=33.34Nm3.16直流电动机用电枢电路串电阻的办法启动时,为什么要逐渐切除启动电阻?如切出太快,会带来什么后果?如果启动电阻一下全部切除,,在切除瞬间,由于机械惯性的作用使电动机的转速不能突变,在此瞬间转速维持
不变,机械特性会转到其他特性曲线上,此时冲击电流会很大,所以采用逐渐切除启动电阻的方法.如切除太快,会有可能烧毁电机.3.17转速调节(调速)与固有的速度变化在概念上有什么区别?速度变化是在某机械特性下,由于负载改变而引起的,二速度调节则是某一特定的负载下,靠人为改变机械特性而得到的.3.18他励直流电动机有哪些方法进行调速?它们的特点是什么?他励电动机的调速方法:第一改变电枢电路外串接电阻Rad特点在一定负载转矩下,串接不同的电阻可以得到不同的转速,机械特性较软,电阻越大则特性与如软,稳定型越低,载空或轻载时,调速范围不大,实现无级调速困难,在调速电阻上消耗大量电量。第二改变电动机电枢供电电压特点当电压连续变化时转速可以平滑无级调速,一般只能自在额定转速以下调节,调速特性与固有特性相互平行,机械特性硬度不变,调速的稳定度较高,调速范围较大,调速时因电枢电流与电压无关,属于恒转矩调速,适应于对恒转矩型负载。可以靠调节电枢电压来启动电
机,不用其它启动设备,第三改变电动机主磁通特点可以平滑无级调速,但只能弱词调速,即在额定转速以上调节,调速特性较软,且受电动机换向条件等的限制,调速范围不大,调速时维持电枢电压和电流步变,属恒功率调速。3.19直流电动机的电动与制动两种运转状态的根本区别何在?电动机的电动状态特点是电动机所发出的转矩T的方向与转速n的方向相同.制动状态特点使电动机所发的转矩T的方向与转速n的方向相反3.20他励直流电动机有哪几种制动方法?它们的机械特性如何?试比较各种制动方法的优缺点。1反馈制动机械特性表达式:n=U/Keφ-(Ra+Rad)T/keKtφ2T为负值,电动机正转时,反馈制动状态下的机械特性是第一象限电动状态下的机械特性第二象限内的延伸.反馈制动状态下附加电阻越大电动机转速越高.为使重物降速度不至于过高,串接的附加电阻不宜过大.但即使不串任何电阻,重物下放过程中电机的转速仍过高.如果放下的件较重.则采用这种制动方式运行不太安全.2反接制动
电源反接制动电源反接制动一般应用在生产机械要求迅速减速停车和向的场合以及要求经常正反转的机械上.倒拉反接制动倒拉反接制动状态下的机械特性曲线实际上是第一象限电动状态下的机械特性区现在第四象限中的延伸,若电动反向转在电动状态,则倒拉反接制动状态下的机械特性曲就是第三象限中电动状态下的机械特性曲线在第二象限延伸..它可以积低的下降速度,保证生产的安全,缺点是若转矩大小估计不准,则本应下降的重物可能向上升,机械特硬度小,速度稳定性差.3能耗制动机械特性曲线是通过原点,且位于第二象限和第四象限的一条直线,优点是不会出现像倒拉制动那样因为对TL的大小估计错误而引起重物上升的事故.运动速度也较反接制动时稳定.3.21一台直流他励电动机拖动一台卷扬机构,在电动机拖动重物匀速上升时讲电枢电源突然反接,试利用机械特性从机电过程上说明:①从反接开始到系统新的稳定平衡状态之间,电动机经历了几种运行状态?最后在什么状态下建立系统新的稳定平衡点?
②各种状态下转速变化的机电过程怎样?①从反接开始到系统到达新的稳定平衡状态之间,电动机经历了电动机正向电动状态,反接制动状态,反向电动状态,稳定平衡状态.②bacf电动机正向电动状态由a到b特性曲线转变;反接制动状态转速逐渐降低,到达c时速度为零,反向电动状态由c到f速度逐渐增加.稳定平衡状态,反向到达f稳定平衡点,转速不再变化.
第四章4.1什么叫过渡过程?什么叫稳定运行过程?试举例说明之。当系统中的转矩或负载转矩发生改变时,系统就要由一个稳定的运转状态变化到另一个稳定运转状态,这个变化过程称为过渡过程.如龙门刨床的工作台,可逆式轧钢机的启动,制动,反转和调速.当系统中德福在转矩和拖动转矩相等时,没有动态转矩,系统恒速运转,这个过程叫稳定运行过程,如不经常启动,制动而长期运行的工作机械.4.2研究过渡过程有什么实际意义?试举例说明之。为了满足启动,制动,反转和调速的要求,必须研究过渡过程的基本规律,研究系统各参数对时间的变化规律,如转速,转矩,电流等对时间的变化规律,才能正确的选择机电传动装置,为电机传动自动控制系统提供控制原则.设计出完善的启动,制动等自动控制线路,以求改善产品质量,提高生产率和减轻劳动强度.这就是研究过渡过程的目的和实际意义.如造纸机要求衡转矩.4.3若不考虑电枢电感时,试将电动机突加电枢电压启动的过渡过程曲线Ia=f(t),n=f(t)和R-C串联电路突加输入电压充电过程的过渡过程曲线ic=f(t)、uc=f(t)加以比较,并从物理意义上说明它们的异、同点。4.4机电时间常数的物理意义是什么?它有那些表示形式?各种表示式各说明了哪些关系?
222224.5直流他励电动机数据如下:PN=21kW,UN=220V,IN=115A,nN=980r/min,Ra=0.1Ω,系统折算到电22①求系统的机电时间常数τm;②若电枢电路串接1Ω的附加电阻,则τm变为多少?③若在上述基础上在将电动机励磁电流减小一半,又变为多少(设磁路没有饱和)?①N0=nNUN/(UN-INRa)=1034r/min经过计算Tst=3926NmTN=9.55PN/nN=9.55*21000/980=205Nm2=64.7*1034/375*3926=0.04系统的机电时间常数τm=0.045②当电枢电路串接1Ω的附加电阻时Δn=(Rad+Ra)TL/KeKtφKeφ=(UN-INRa)/nN=0.212222机电时间常数的物理意义是ns-n=GDn0dn/375Tstdtτm=GDn0/375Tst是反映机电传动系统机械惯性的物理量,表达形式有τm=GDn0/375Tst和τm=ΔnLGD/375TL和τm=GDns/375Td动机轴上的总飞轮转矩GD=64.7N/m。τm=GDn0/375Tstτm=ΔnLGD/375TL=(Rad+Ra)GD/375(Keφ)9.55
=0.438③若在上述基础上在将电动机励磁电流减小一半,222=1.752s4.6加快机电传动系统的过渡过程一般采用哪些方法?2.态转矩Td.4.7为什么大惯量电动机反而比小惯量电动机更为人们所采用?2转矩的5到10倍,快速性能好,且低速时转矩大,电枢短粗,散热性好过载持续时间可以较长.4.8试说明电流充满系数的概念?充满系数是电流曲线与衡坐标所包围的面积除以矩形曲线的面积.4.9具有矩形波电流图的过渡过程为什么称为最优过渡过程?它为什么能加快机电传动系统的过渡过程?充满系数越接近1越好,说明整个动态过程中电流保持在最大值不变,整个过渡过程终电流越大,加快过渡过程.从而可获得最短的过程.τm=ΔnLGD/375TL=(Rad+Ra)GD/375(Keφ/4)9.55加快机电传动系统的过渡过程一般采用1减少系统GD2增加动大惯量电动机电枢作的粗短,GD较大但它的最大转矩约为额定
第五章5.1有一台四极三相异步电动机,电源电压的频率为50HZ,满载时电动机的转差率为0.02求电动机的同步转速、转子转速和转子电流频率。n0=60f/pS=(n0-n)/n0=60*50/20.02=(1500-n)/1500=1500r/minn=1470r/min电动机的同步转速1500r/min.转子转速1470r/min,转子电流频率.f2=Sf1=0.02*50=1HZ5.2将三相异步电动机接三相电源的三根引线中的两根对调,此电动机是否会反转?为什么?如果将定子绕组接至电源的三相导线中的任意两根线对调,例如将B,C两根线对调,即使B相遇C相绕组中电流的相位对调,此时A相绕组内的电流导前于C相绕组的电流2π/3因此旋转方向也将变为A-C-B向逆时针方向旋转,与未对调的旋转方向相反.5.3有一台三相异步电动机,其nN=1470r/min,电源频率为50HZ。设在额定负载下运行,试求:①定子旋转磁场对定子的转速;1500r/min②定子旋转磁场对转子的转速;30r/min③转子旋转磁场对转子的转速;30r/min④转子旋转磁场对定子的转速;1500r/min⑤转子旋转磁场对定子旋转磁场的转速。0r/min5.4当三相异步电动机的负载增加时,为什么定子电流会随转子电流的增加而增加?因为负载增加n减小,转子与旋转磁场间的相对转速(n0-n)增加,转子导体被磁感线切割的速度提高,于是转子的感应电动势增加,转子电流特增加,.定子的感应电动使因为转子的电流增加而变大,所以定子的电流也随之提高.5.5三相异步电动机带动一定的负载运行时,若电源电压降低了,此时电动机的转矩、电流及转速有无变化?如何变化?若电源电压降低,电动机的转矩减小,电流也减小.转速不变.5.6有一台三相异步电动机,其技术数据如下表所示。试求:①线电压为380V时,三相定子绕组应如何接法?②求n0,p,SN,TN,Tst,Tmax和Ist;③额定负载时电动机的输入功率是多少?①线电压为380V时,三相定子绕组应为Y型接法.②TN=9.55PN/nN=9.55*3000/960=29.8NmTst/TN=2Tst=2*29.8=59.6Nm型号PN/kWUN/V满载时Ist/INTst/TNTmax/TN-1nN/r·minIN/AηN×100cosφY132S-63220/38096012.8/7.2830.756.52.02.0
Tmax/TN=2.0Tmax=59.6NmIst/IN=6.5Ist=46.8A一般nN=(0.94-0.98)n0n0=nN/0.96=1000r/minSN=(n0-nN)/n0=(1000-960)/1000=0.04P=60f/n0=60*50/1000=3③η=PN/P输入P输入=3/0.83=3.615.75.85.9三相异步电动机正在运行时,转子突然被卡住,这时电动机的电流会如何变化?对电动机有何影响?电动机的电流会迅速增加,如果时间稍长电机有可能会烧毁.三相异步电动机断了一根电源线后,为什么不能启动?而在运行时断了一线,为什么仍能继续转动?这两种情况对电动机将产生什么影响?三相异步电动机断了一根电源线后,转子的两个旋转磁场分别作用于转子而产生两个方向相反的转矩,而且转矩大小相等。故其作用相互抵消,合转矩为零,因而转子不能自行启动,而在运行时断了一线,仍能继续转动转动方向的转矩大于反向转矩,这两种情况都会使电动机的电流增加。三相异步电动机在相同电源电压下,满载和空载启动时,启动电流是否相同?启动转矩是否相同?三相异步电动机在相同电源电压下,满载和空载启动时,启动电流和启动转矩都相同。Tst=KR2u2/(R22+X220)I=4.44f1N2/R与U,R2,X20有关5.10三相异步电动机为什么不运行在Tmax或接近Tmax的情况下?根据异步电动机的固有机械特性在Tmax或接近Tmax的情况下运行是非常不稳定的,有可能造成电动机的停转。5.11有一台三相异步电动机,其铭牌数据如下:①当负载转矩为250N·m时,试问在U=UN和U`=0.8UN两种情况下电动机能否启动?TN=9.55PN/nN=9.55*40000/1470=260NmTst/TN=1.2Tst=312NmTst=KR2U2/(R22+X202)=312Nm312Nm>250Nm所以U=UN时电动机能启动。PN/kW-1nN/r·minUN/VηN×100cosφNIst/INTst/TNTmax/TN接法401470380900.96.51.22.0△
当U=0.8U时Tst=(0.82)KR2U2/(R22+X202)=0.64*312=199NmTstn0时一部电动机处于发电状态.这时转子导体切割旋转磁场的方向与电动机状态时的方向相反.电流改变了方向,电磁转矩也随之改变方向..反接制动电源反接改变电动机的三相电源的相序,这就改变了旋转磁场的方向,电磁转矩由正变到负,这种方法容易造成反转..倒拉制动出现在位能负载转矩超过电磁转矩时候,例如起重机放下重物时,机械特性曲线如下图,特性曲线由a到b,在降速最后电动机反转当到达d时,T=TL系统到达稳定状态,bad能耗制动首先将三项交流电源断开,接着立即将一个低压直流电圆通入定子绕组.直流通过定子绕组后,在电动机内部建立了一个固定的磁场,由于旋转的转子导体内就产生感应电势和电流,该电流域恒定磁场相互作用产生作用方向与转子实际旋转方向相反的转矩,所以电动机转速迅速下降,此时运动系统储存的机械能被电动机转换成电能消耗在转子电路的电阻中.5.19试说明鼠笼式异步电动机定子极对数突然增加时,电动机的降速过程。
N0=60f/pp增加定子的旋转磁场转速降低,定子的转速特随之降低.5.20试说明异步电动机定子相序突然改变时,电动机的降速过程。ba12c异步电动机定子相序突然改变,就改变了旋转磁场的方向,电动机状态下的机械特性曲线就由第一象限的曲线1变成了第三象限的曲线2但由于机械惯性的原因,转速不能突变,系统运行点a只能平移到曲线2的b点,电磁转矩由正变到负,则转子将在电瓷转矩和服在转矩的共同作用下迅速减速,在从点b到点c的整个第二相限内,电磁转矩和转速方向相反,.5.21如图5.51所示:为什么改变QB的接通方向即可改变单相异步电动机的旋转方向?定子上有两个绕组AX,BY,一个是启动绕组,另一个是运行绕组,BY上串有电容.他们都镶嵌在定子铁心中,两个绕组的轴线在空间上垂直,绕组BY电路中串接有电容C,当选择B变单相异步电动机的旋转方向5.22单相罩极式异步电动机是否可以用调换电源的两根线端来使电动机反转?为什么?不能,因为必须调换电容器C的串联位置来实现,即改变QB的接通位置,就可以改变旋转磁场的方向,从而实现电动机的反转,.5.23同步电动机的工作原理与异步电机的有何不同?异步电动机的转子没有直流电流励磁,它所需要的全部磁动势均由定子电流产生,所以一部电动机必须从三相交流电源吸取滞后电流来建立电动机运行时所需要的旋转磁场,它的功率因数总是小于1的,同步电动机所需要的磁动势由定子和转子共同产生的当外加三相交流电源的电压一定时总的磁通不变,在转子励磁绕组中通以直流电流后,同一空气隙中,又出现一个大小和极性固定,极对数与电枢旋转磁场相同的直流励磁磁场,这两个磁场的相互作用,使转子北电枢旋转磁场拖动着一同步转速一起转动.5.24一般情况下,同步电动机为什么要采用异步启动法?因为转子尚未转动时,加以直流励磁,产生了旋转磁场,并以同步转速转动,两者相吸,定子旋转磁场欲吸转子转动,但由于转子的惯性,它还没有来得及转动时旋转又到了极性相反的方向,两者又相斥,所以平均转矩为零,不能启动.5.25为什么可以利用同步电动机来提高电网的功率因数?当直流励磁电流大于正常励磁电流时,电流励磁过剩,在交流方面不仅无需电源供电,而且还可以向电网发出点感性电流与电感性无功功率,正好补偿了电网附近电感性负载,的需要.使整个电网的功率因数提高.合适的参数使该绕组中的电流iA在相位上超前或滞后iB,从而改变QB的接通方向即可改
第六章6.1有一台交流伺服电动机,若加上额定电压,电源频率为50Hz,极对数P=1,试问它的理想空在转速是多少?n0=60*f/p=60*50/1=3000r/min理想空在转速是3000r/min6.2何谓“自转”现象?交流伺服电动机时怎样克服这一现象,使其当控制信号消失时能迅速停止?自转是伺服电动机转动时控制电压取消,转子利用剩磁电压单相供电,转子继续转动.克服这一现象方法是把伺服电动机的转子电阻设计的很大,使电动机在失去控制信号,即成单相运行时,正转矩或负转矩的最大值均出现在Sm>1的地方.当速度n为正时,电磁转矩T为负,当n为负时,T为正,即去掉控制电压后,单相供电似的电磁转矩的方向总是与转子转向相反,所以是一个制动转矩.可使转子迅速停止不会存在自转现象6.3有一台直流伺服电动机,电枢控制电压和励磁电压均保持不变,当负载增加时,电动机的控制电流、电磁转矩和转速如何变化?当副在增加时,n=Uc/KeΦ-RT/KeKtΦ2电磁转矩增大,转
速变慢,根据n=Uc/KeΦ-RaIa/KeΦ控制电流增大.6.4有一台直流伺服电动机,当电枢控制电压Uc=110V时,电枢电流Ia1=0.05A,转速n1=3000r/min;加负载后,电枢电流Ia2=1A,转速n2=1500r/min。试做出其机械特性n=f(T)。电动机的电磁转矩为T=BIaNLD/2,n300015000.05A1AT6.5若直流伺服电动机的励磁电压一定,当电枢控制电压Uc=100V时,理想空载转速n0=3000r/min;当Uc=50V时,n0等于多少?n0=120Uc/πNBLD电压与转速成正比,当Uc=50V时,n0等于1500r/min6.6为什么直流力矩电动机要做成扁平圆盘状结构?直流力矩电动机的电磁转矩为T=BIaNlD/2在电枢体积相同条件下,电枢绕组的导线粗细不变,式中的BIaNl/2紧思维常数,故转矩T与直径D近似成正比.电动机得直径越大力矩就越大.
6.7为什么多数数控机床的进给系统宜采用大惯量直流电动机?因为在设计.制造商保证了电动机能造低速或阻转下运行,在阻转的情况下,能产生足够大的力矩而不损坏,加上他精度高,反应快,速度快线性好等优点.因此它常用在低俗,需要转矩调节和需要一定张力的随动系统中作为执行元件.6.8永磁式同步电动机为什么要采用异步启动?因为永磁式同步驶电动机刚启动时,器定子长生旋转磁场,但转子具有惯性,跟不上磁场的转动,定子旋转时而吸引转子,时而又排斥转子,因此作用在转子的平均转矩为零,转子也就旋转不起来了.6.9磁阻式电磁减速同步电动机有什么突出的优点?磁阻式电磁减速同步电动机无需加启动绕组,它的结构简单,制造方便.,成本较低,它的转速一般在每分钟几十转到上百专职践踏是一种常用的低速电动机.6.10一台磁组式电磁减速同步电动机,定子齿数为46,极对数为2,电源频率为50Hz,转子齿数为50,试求电机的转速。电动机的旋转角速度为ω=(Zr-Zs)2πf/ZrP=(50-46)*2*3.14*50/50*2=12.56rad
ω=2πn/60n=60*ω/2π=120r/min6.11交流测速发电机在理想情况下为什么转子不动时没有输出电压?转子转动后,为什么输出电压与转子转速成正比?因为测速发电动机的输出电压U=Kn=KK’dθ/dt,所以转子不动时没有输出典雅,转子动时输出电压与转速成正比.6.12何谓剩余电压、线性误差、相位误差?剩余电压是只当测速发电动机的转矩为零时的输出电压.线性误差是指严格的说输出电压和转速不是直线关系,由非线性引起的误差称为线性误差.相位误差;是指在规定的转速范围内,输出电压与励磁电压之间相位的变化量.6.13一台直流测速发电机,已知Ra=180Ω,n=3000r/min,RL=2000Ω,U=50V,求该转速下的输出电流和空载输出电压。Ia=Ua/RL=50/2000=0.025A
Ua=Cen/(1+Ra/RL)50=Cen/(1+180/2000)Cen=Ua0=54.5V输出电流是0.025A,空载输出电压是54.5V6.14某直流测速发电机,在转速3000r/min时,空载输出电压为52V;接上2000Ω的负载电阻后,输出电压为50V。试求当转速为1500r/min,负载电阻为5000Ω时的输出电压。在转速3000r/min时,空载输出电压为52V时52=Ce3000Ce=52/3000当接上2000Ω的负载电阻后,输出电压为50V时Ua=Cen/(1+Ra/RL)50=52/(1+Ra/2000)Ra=80Ω当转速为1500r/min,负载电阻为5000Ω时的输出电压为Ua=Ce*1500/(1+80/5000)=26/1.016=25V6.15直流测速发电机与交流测速发电机各有何优缺点?直流测速发电机的优点是没有相位不波动.没有剩余电压,输出特性的斜率比交流测速发动机的大.缺点是由于有电
刷和换向器,因而结构复杂,维护不便.摩擦转矩大.有换向火花,产生无线电干扰信号,输出特性不稳定,且正反转时,输出部对称.交流测速发电机的优点是不需要电刷和换向器,因而结构简单,维护容易,惯量小,无滑动接触,输出特性稳定,精度高,摩擦转矩小,不产生无线电干扰,工作可靠.正反转转向时输出特性对称,缺点是存在剩余电压和相位误差,切负载的大小和性质会影响输出电压的幅值和相位.6.16试简述控制式自整角机和力矩式自整角机的工作原理。控制式自整角机的工作原理是当发送机得力磁绕组通入励磁电流后,产生交变脉冲磁通,在相绕组中感应出感应,从而绕组中产生电流,这些电流都产生脉冲磁场,并分别在自整角变压器的单相输出绕组中感应出相同的电动势..力矩式自整角机的工作原理是当接收机转子和发送机的转子对定子绕组的位置相同,所以两边的每相绕组中的电动势相等,因此在两边的三相绕组中没有电流.若发送机转子转动一个角度,于是发送机和接收机相应的每相定子绕组中的两个电动势就不能相互抵消,定子绕组中就有电流,这个电流和接受激励此磁通作用而产生转矩.6.17力矩式自整角机与控制自整角机有什么不同?试比较它们的优缺点。各自应用在什么控制系统中较好。自整角机的输出电压需要交流放大器放大后去控制交
流伺服电动机,伺服电动机同时带动控制对象和自整角变压器的转子,它的转动总是要使使调角减小,指导δ=0时为止.它适合于大转矩的情况.力矩式自整角机既可以带动控制对象,也可以带动自整角变压器的转子,由于负载很轻,所以不需要用伺服电动机,而是由自整角机直接来实现转角随动.6.18一台直线异步电动机,已知电源频率为50Hz,极矩τ为10cm,额定运行时的滑差率为0.05,试其额定速度。次级线圈的额定速度是V=(1-S)2fτ=(1-0.05)*2*50*0.1=9.5m/s6.19直线电动机较之旋转电动机有哪些优缺点。直线电动机的优点是1直线电动机无需中间传动机构,因而使整个机构得到简化,提高了精度,减少了振动和噪声.2反应快速.3散热良好,额定值高,电流密度可取大值,对启动的限制小.4装配灵活,往往可将电动机的定子和动子分别于其他机体合成一体.缺点是存在着效率和功率因数低,电源功率大及低速性能差等.
第七章7.17.27.3电动机的温升与哪些因素有关?电动机铭牌上的温升值其含义是什么?电动机的温升、温度以及环境温度三者之间有什么关系?电动机的温升与铜耗,铁耗和机械损耗有关.电动机铭牌上的温升值其含义是电动机绝缘许可的最高温度.电动机的温升、温度以及环境温度三者之间是刚工作时电动机的温度与周围介质的温度之差很小,热量的发散是随温度差递增的,少量被发散法到空气中,大量被空气吸收.,因而温度升高的较快.随着电动机温度逐渐升高,被电动机吸收的减少,而发散到空气中的热量增加..电动机在运行中其电压、电流、功率、温升能否超过额定值?是何原因?电动机在运行中其电压、电流、功率、温升能超过额定值因为保证电动机长期安全运行的必要条件是按发热条件选择电动机功率的,只要保证θmax≤θa电动机的选择包括哪些内容?电动机的选择包括:1电动机容量.2电动机电压等级,3电动额定转速.4电动机结构型式.5电动机的种类7.4选择电动机的容量时主要应考虑哪些因素?选择电动机容量应根据三相基本原则进行:1发热:电动机在运行的实际最高工作温度等于或小于电动机的最高工作温度,2过
载能力:短时间内承受高于额定功率的负载功率时保证θmax≤θa.当决定电动机容量的主要因素不是发热而是电动机的过载能力,即所选电动机的最大转矩Tmax或最大电流Imax必须大于运行过程中可能出现的最大负载电流ILmax和最大负载转矩Tlmax.3启动能力必须使电动机能可靠启动TL<λstTN7.57.67.7电动机有哪几种工作方式?当电动机的实际工作方式与铭牌上标注的工作方式不一致时,应注意哪些问题?电动机有连续工作制,短时工作制,重复短时工作之三种方式.当电动机的实际工作方式与铭牌上标注的工作方式不一致时,应注意最高工作温度是否小于电动机的最高许可工作温度,启动转矩是否大于负载转矩.一台室外工作的电动机,在春、夏、秋、冬四季其实际允许的使用容量是否相同?为什么?实际允许的使用容量不相同,周围空气的温度发生了变化,对电动机的散热快慢有很大影响.3泵的效率η1=0.9,传动装置的效率η2=0.78,水的重度3PL=QγH/102η1η2=10*1000*500/102*0.9*0.78*3600=19.4KW有一抽水站的水泵向高度H=10m处送水,排水量Q=500m/h,水r=1000kg/m,试选择一台电动机拖动水泵。
查手册选择Y200L2-6,额定功率22KW满载转速是970r/min,最大转矩/额定转矩=1.87.8有一生产机械的实际负载转矩曲线如题7.8图所示,生产机械要求的转速nN=1450r/min,试选一台容量合适的交流电动机来拖动次生产机械。用等効转矩法,先求初等効转矩*2222=6.3Nm等效功率是PL=Tdn/9550=6.3*1450/9550=0.96KW查手册选择Y90S-4电动机,额定功率是1.1KW.满载转速1400r/min,最大主转矩/额定转矩=2.2所选电动机的额定转矩为TN=9550PN/nN=9550*1.1/1400=7.5Nm电动机的最大转矩是Tmax=2.2TN=16.5Nm>6.3Nm所选电动机符合要求.7.9一生产机械需要直流电动机拖动,负载曲线如题7.9图所示,试选择电动机的容量。222222T=√(4*20+9*10+4*40+7*40+12*6)/116电动机的等效功率Pd=√(P1t1+P2t2+P3t3)/(t1+t2+t3)=√(5*2+3*3+4*5)/10
=4KW电动机的容量为4KW7.10有台35Kw,工作时间30min的短时工作电动机,欲用一台Th=90min的长期工作制电动机代替。若不考虑其他问题(如过载能力等),试问长期工作制电动机的容量应选多大?等效功率法2222Pp=20.2Kw长期工作制电动机的容量应选20.2Kw7.11暂载率ε表示什么?当ε=15%时,能否让电动机工作15min,休息85min?为什么?试比较ε=15%,30kW和ε=40%,20kW两个重复短时工作制的电动机,哪一台容量大些?暂载率ε表示重复短时工作制的工作情况,即ε=工作时间/(工作时间+停车时间)=tp/(tp+t0)当ε=15%时,不能让电动机工作15min,休息85min,因为规定一个周期的总时间tp+t0不能超过十分钟.把20KW电动机换算成ε=15%的,相对应的等效负载功率为Ps=P√ε/εSn=20*√0.4/0.15=32.7KW所以ε=40%,20Kw的短时工作制电动机容量大些.Psts=Pptp35*30=Pp*90
7.12有一生产机械的功率为10kW,其工作时间tp=0.72min,t0=2.28min,试选择所用电动机的容量。ε=tp/(tp+t0)=0.72/(2.28+0.72)=0.24换算成额定负载暂载率εsN=25%时,其所需要的相对应的等效负载功率为Ps=P√ε/εsN=10*√24%/15%=12.65kw所用电动机的容量为12.65kw
第八章8.1从接触器的结构特征上如何区分交流接触器与直流接触器?为什么?直流接触器与交流接触器相比,直流接触器的铁心比较小,线圈也比较小,交流电磁铁的铁心是用硅钢片叠柳而成的.线圈做成有支架式,形式较扁.因为直流电磁铁不存在电涡流的现象.8.2为什么交流电弧比直流电弧容易熄灭?因为交流是成正旋变化的,当触点断开时总会有某一时刻电流为零,此时电流熄灭.而直流电一直存在,所以与交流电相比电弧不易熄灭.8.3若交流电器的线圈误接入同电压的直流电源,或直流电器的线圈误接入同电压的交流电源,会发生什么问题?若交流电器的线圈误接入同电压的直流电源,会因为交流线圈的电阻太小儿流过很大的电流使线圈损坏.直流电器的线圈误接入同电压的交流电源,触点会频繁的通短,造成设备的不能正常运行.8.4交流接触器动作太频繁时为什么会过热?因为交流接触启动的瞬间,由于铁心气隙大,电抗小,电流可达到15倍的工作电流,所以线圈会过热.8.5在交流接触器铁心上安装短路环为什么会减少振动和噪声?
在线圈中通有交变电流时,再铁心中产生的磁通是与电流同频率变化的,当电流频率为50HZ时磁通每秒有100次通过零,这样所产生的吸力也为零,动铁心有离开趋势,但还未离开,磁通有很快上来,动铁心有被吸会,造成振动.和噪声,因此要安装短路环.8.6两个相同的110V交流接触器线圈能否串联接于220V的交流电源上运行?为什么?若是直流接触器情况又如何?为什么?两个相同的110V交流接触器线圈不能串联接于220V的交流电源上运行,因为在接通电路的瞬间,两各衔铁不能同时工作,先吸合的线圈电感就增大,感抗大线圈的端电压就大,另一个端电压就小,时间长了,有可能把线圈烧毁.若是直流接触器,则可以.8.7电磁继电器与接触器的区别主要是什么?接触器是在外界输入信号下能够自动接通断开负载主回路.继电器主要是传递信号,根据输入的信号到达不同的控制目的.8.8电动机中的短路保护、过电流保护和长期过载(热)保护有何区别?电动机中的短路保护是指电源线的电线发生短路,防止电动机过大的电枢电路而损坏.自动切断电源的保护动作.
过电流保护是指当电动机发生严重过载时,保护电动机不超过最大许可电流.长期过载保护是指电动机的短时过载保护是可以的,但长期过载时电动机就要发热,防止电动机的温升超过电动机的最高绝缘温度.8.9过电流继电器与热继电器有何区别?各有什么用途?过电流继电器是电流过大就断开电源,它用于防止电动机短路或严重过载.热继电器是温度升高到一定值才动作.用于过载时间不常的场合.8.10为什么热继电器不能做短路保护而只能作长期过载保护?而熔断器则相反,为什么?因为热继电器的发热元件达到一定温度时才动作,如果短路热继电器不能马上动作,这样就会造成电动机的损坏.而熔短期,电源一旦短路立即动作,切断电源.8.11自动空气断路器有什么功能和特点?功能和特点是具有熔断器能直接断开主回路的特点,又具有过电流继电器动作准确性高,容易复位,不会造成单相运行等优点.可以做过电流脱扣器,也可以作长期过载保护的热脱扣器.8.12时间继电器的四个延时触点符号各代表什么意思?
得电延时闭合的动合触点得电延时断开的动断触点失电延时闭合的动断触点失电延时断开的动合触点8.13机电传动装置的电器控制线路有哪几种?各有何用途?电器控制线路原理图的绘制原则主要有哪些?电器控制线路有1:启动控制线路及保护装置.2正反转控制线路.3:多电动机的连锁控制线路.4:电动控制线路.5:多点控制线路.6:顺序控制线路.7:多速异步电动机的基本控制线路.8:电磁铁.电磁离合器的基本控制线路.电器控制线路原理图的绘制原则主要有1:应满足生产工艺所提出的要求.2:线路简单,布局合理,电器元件选择正确并得到充分.3操作,维修方便4设有各种保护和防止发生故障的环节.5能长期准确,稳定,可靠的工作.8.14为什么电动机要设有零电压和欠电压保护?
零电压和欠电压保护的作用是防止当电源暂时供电或电压降低时而可能发生的不容许的故障.,8.15在装有电器控制的机床上,电动机由于过载而自动停车后,若立即按钮则不能开车,这可能是什么原因?有可能熔短器烧毁,使电路断电.或者是热继电器的感应部分还未降温,热继电器的触点还处于断开状态.8.16要求三台电动机1M、2M、3M按一定顺序启动:即1M启动后,2M才能启动;2M启动后3M才能启动;停车时则同时停。试设计此控制线路。SB1SB1KM1KMSB22KMSB31KM2KM2KM3KM3KM8.17如题8.17图所示的启停控制线路,试从接线、经济、安全、方便等方面来分析一下,有什么问题?(a)控制不方便.(b)从控制柜到按钮盒多接了线,并且接线复杂,造成了不必要的麻烦.
(c)电路容易造成故障,不安全.(d)停止按钮没有在主会路上,停止控制不安全.8.18试设计一台异步电动机的控制线路。要求:①能实现启停的两地控制;②能实现点动调整;③能实现单方向的行程保护;④要有短路和长期过载保护。FU3SB4SB1KM1KM1SB2SB5SBSTFR1KMFRM8.19为了限制电调整时电动机的冲击电流,试设计它的电气控制线路。要求正常运行时为直接启动,而点动调整时需输入限流电阻。
FU1SB3SB1KM1KM2KM2SB1KM2KM2KMFRM8.20试设计一台电动机的控制线路。要求能正反转并能实现能耗制动。FUSB1SB1KM1KM2KM1KM3KM2SB2KM2KMFR3KM3KMM
8.21冲压机床的冲头,有时用按钮控制,又实用脚踏开关操作,试设计用转换开关选择工作方式的控制线路。2SB1SB3SB1KM1KM8.22容量较大的鼠笼式异步电动机反接制动时电流较大,应在反接制动时在定子回路中串入电阻,试按转速原则设计其控制线路。
FU1KM2KM1SBn>3SB1KM1KM2KM2KM1KMKSFRM8.23平面磨床中的电磁吸盘能否采用交流的?为什么?平面磨床中的电磁吸盘不能采用交流的,因为交流电是成正旋波变化的,某一时刻电流会为零,.此时工件受力会甩出,造成事故.8.24起重机上的电动机为什么不采用熔断器和热继电器作保护?因为如果使用熔断器和热继电器作保护,当它们作用的时候,电动机断电的时候,电动机没有转矩,重物由于重力会迅速下降,就会造成事故.8.25试设计一条自动运输线,有两台电动机,1M拖动运输机,2M拖动写料及。要求:
①1M先启动后,才允许2M启动;②2M先停止,经一段时间后1M蔡自动停止,且2M可以单独停止;③两台电动机均有短路、长期过载保护。FUFU1KM2KM1SB2SB1KT3SB1KM1KM1KT1KMFRFR3SB4SB1KM2KM2KM1M2M8.26题8.26图为机床自动间歇润滑的控制线路图,其中接触器KM为润滑油泵电动机启停用接触器(主电路为画出),控制线路可使润滑有规律地间歇工作。试分析此线路的工作原理,并说明开关S和按钮SB的作用。
SB1KTKSK3KTKM1KTK2KTSB按钮为人工的点动控制.S自动的间歇润滑,按下后KM得电,电动机工作,1KT得电,经过一段时间后,动合触点闭合K得电,同时KM失电,电动机停止工作,2KT得电一段时间后,动断触点断开,K闭合电动机重新工作.8.27试设计1M和2M两台电动机顺序启,停的控制线路。要求:①1M启动后,2M立即自动启动;②1M停止后,延时一段时间,2M才自动停止;③2M能点动调整工作;④两台电动机均有短路,长期过载保护。
FUFU1KM2KM1SB2SB1KMFRFR1KM1KTFU2KT1M2M3SB2KT1KT2KM4SB8.28试设计某机床主轴电动机控制线路图。要求:①可正反转,且可反接制动;②正转可点动,可在两处控制启,停;③有短路和长期过载保护;④有安全工作照明及电源信号灯。
FU4SB1SB2SB3SB1KM2KM5SB1KMFRM6SB3SB2KM8.29试设计一个工作台前进——退回的控制线路。工作台有电动机M拖动,行程开关1ST,2ST分别装在工作台的原位和终点。要求:①能自动实现前进——后退——停止到原位;②工作台前进到达终点后停一下在后退;③工作台在前进中可以人为地立即后退到原位;④有终端保护.
1ST1SB1KM1KM2KM1KTFUK2ST2KT4SB1ST1KMK2KMK2KMSB
第九章9.1PLC由哪几个主要部分组成?各部分的作用是什么?PLC由中央处理器CPU,存储器,输入输出接口,编程器组成.中央处理器CPU是核心,它的作用时接受输入的程序并存储程序.扫描现场的输入状态,执行用户程序,并自诊断.存储器用来存放程序和数据,输入接口采集现场各种开关接点的信号状态,并将其转化成标准的逻辑电平,输出接口用于输出电信号来控制对象.编程器用于用户程序的编制,编辑,调试,检查和监视.还可以显示PLC的各种状态.9.2输入、输出接口电路中的光电耦合器件的作用是什么?作用是1实现现场与plc主机的电器隔离,提高抗干扰性.2避免外电路出故障时,外部强电侵入主机而损坏主机.3电平交换,现场开关信号可能有各种电平,光电耦合起降他们变换成PLC主机要求的标准逻辑电平.9.3何谓扫描周期?试简述的工作过程.。扫描周期是每执行一遍从输入到输出所需的时间.工作过程是1输入现场信号:在系统的控制下,顺序扫描各输入点,读入的输入点的状态.2顺序扫描用户程序中的各条指令,根据输入状态和指令内容进行逻辑运算.3并输出控制信号,根据逻辑运算的结果,输出状态寄存器向
各输出点发出相应的控制信号.实现所要求的逻辑控制功能.9.49.5PLC有哪些主要特点?PLC的主要特点是①应用灵活,扩展性好.②操作方便③标准化的硬件和软件设计,通用性强.④完善的监视和诊断功能.⑤可适应恶劣的工业应用环境.⑥控制功能强写出题9.5图梯形图的指令程序。401400403105402102104100101103430404题9.5图LDORANILDANDORB401400402403105
LDIANILDANIORBLDORBANBOROUT9.6100101102103104404430简化或改正题9.6图所示梯形图,并写出改正后的指令程序。400401402403430400402401431400403404401430431402
LDORANDOROUT403402403401400430402400(a)401430400400401402430431(b)LDANDOUTLDANDOUT400401430400402431
403404401402430400403404431400(C)LDANDORANDANDOUTLDANDOROUT4034044004014024304034044004319.7在程序末了,使用或不使用END指令是否有区别?为什么?使用或不使用END指令是有区别的,END指令用于程序结束,即表示程序终了.当有效程序结束后,协一条END指令,可以缩短扫描周期.PLC扫描到END指令,便自动返回.如果没有END程序将一直执行到PLC的最后一行这样既增加运算周期,也易引起系统出错.9.8试用PLC设计出习题8.16的控制程序。
COMPLCCOMSB1SB2SB3SB44004014024034304314324004031KM2KM3KM4304304014314024324304034314034314329.9试用PLC设计出习题8.25的控制程序。COMPLCCOMSB1SB2SB3SB4SB54004014024034054504304314004304024034301KM2KM430450401430403402431431
9.10试用PLC设计出习题8.26的控制程序。COMPLCCOMSB1SB24004014301KM4004014014504501019.11试用PLC设计出习题8.27的控制程序。101101451450451101430
SB1SB2SB2COM400401402PLC430431COMFU1KM2KM电源FRSB24034014304304024024514304504504514034314009.12试用PLC设计出习题8.29的控制程序。
SB1SB2SB3COM400401402PLC430431COMFU1KM2KM电源FR1ST2ST4034044004014314034301014304504044504034314311014021019.13试用PLC的一个8位移位寄存器设计循环移位输出,具体要求是:(1)(2)(3)实现一个亮灯循环移位;实现两个连续亮灯循环移位;实现一个亮一个灭灯循环移位。
400107401OUT402100102104106101SFT100RST-107430431103105107(C)9.14设计PLC控制汽车拐弯灯的梯形图。具体要求是:汽车驾驶台上有一开关,有三个位置分别控制左闪灯亮、右闪灯亮和关灯。当开关扳到S1位置时,左闪灯亮(要求亮、灭时间各1s);当开关扳到S2位置时,右闪灯亮(要求亮、灭时间各1s);当开关扳到S0位置时,关断左、右闪灯;当司机开灯后忘了关灯,则过1.5min后自动停止闪灯。
COMPLCCOMS1S2S04004014024304311KM2KM404400402101430450K1450451101451K1404401402102431452K1452453102453K1401454K904019.15试用PLC设计按行程原则实现机械手的夹紧-正转-放松-反转-回原位的控制。9.16题9.16图所示为由三断组成的金属板传送带,电动机1、2、3分别用于驱动三断传送带,传感器(采用接近开关)1、2、3
用来检测金属板的位置。当金属板正在传送带上传送时,其位置由一个接近开关检测,接近开关安放在两断传送带相邻接的地方,一旦金属板进入接近开关的检测范围,可编程序控制器便发出一个控制输出,使下一个传送带的电动机投入工作,当金属板迁出检测范围时,定时器开始计时,在达到整定时间时,上一个传送带电动机便停止运行。即只有载有金属板的传送带在运转,而未载有金属板的传送带则停止运行。这样就可节省能源。试用PLC实现上述要求的自动控制。COMPLCCOMFU电源FR启动接近开关1接近开关2SB11ST2ST4004014024304314321KM2KM3KM电动机1电动机2电动机3接近开关33ST403400430401431401402432402450451451431450432451430
9.17设计一条用PLC控制的自动装卸线。自动结构示意图如题9.17图所示。电动机M1驱动装料机加料,电动机M2驱动料车升降,电动机M3驱动卸料机卸料。装卸线操作过程是:①料车在原位,显示原位状态,按启动按钮,自动线开始工作;②加料定时5s,加料结束;③延时1s,料车上升;④上升到位,自动停止移动;⑤延时1s,料车自动卸料;⑥卸料10s,料车复位并下降;⑦下降到原位,料自动停止移动.
101405101103430101400430450103430102430450K=5430451K=1COMPLCCOMFU电源FR451402431单周装载连续装载下行程上行程卸料到位卸料复位SB1SB11ST2ST2ST2ST4004054014024034044304314324334341KM2KM3KM3KM3KM装料料车上升料车下降料车卸料料车复位400451400453434403404401452K=1433453K=10434432401101102
第十章电力电子学10.1晶闸管的导通条件是什么?导通后流过晶闸管的电流决定于什么?晶闸管由导通转变为阻断的条件是什么?阻断后它所承受的电压决定于什么?晶闸管的导通条件是:(1)晶闸管的阳极和阴极之间加正向电压。2)晶闸管的阳极和控制极通时加正相电压市晶闸管才能导通.导通后流过晶闸管的电流决定于(电压不变时)限流电阻(使用时由负载)决定.晶闸管由导通转变为阻断的条件是当减少阳极电压或增加负载电阻时,阳极电流随之减少,当阳极电流小于维持电流时,晶闸管便从导通状态转化维阻断状态.阻断后它所承受的电压决定于阳极和阴极的反向转折电压.10.2晶闸管能否和晶体管一样构成放大器?为什么?晶闸管不能和晶体管一样构成放大器,因为晶闸管只是控制导通的元件,晶闸管的放大效应是在中间的PN节上.整个晶闸管不会有放大作用.10.3试画出题10.3图中负载电阻R上的电压波形和晶闸管上的电压波形。(
U2tUgtUdtUst10.4如题4如题10.4图所示,试问:①在开关S闭合前灯泡亮不亮?为什么?②在开关S闭合后灯泡亮不亮?为什么?③再把开关S断开后灯泡亮不亮?为什么?①在开关S闭合前灯泡不亮,因为晶闸管没有导通.②在开关S闭合后灯泡亮,因为晶闸管得控制极接正电,导通.③再把开关S断开后灯泡亮,因为晶闸管导通后控制极就不起作用了.
10.5如题10.5图所示,若在t1时刻合上开关S,在t2时刻断开S,试画出负载电阻R上的电压波形和晶闸管上的电压波形。U2tUgt2t1tURtUst10.6晶闸管的主要参数有哪些?晶闸管的主要参数有①断态重复峰值电压UDRE:在控制极断路何竟闸管正向阻断的条件下,可以重复加在晶闸管两端的正向峰值电压,其数值规定比正向转折电压小100V.
②反向重复峰值电压URRM:在控制极断路时,可以重复加在晶闸官元件上的反向峰值电压.③额定通态平均电流(额定正向平均电流)IT.④维持电流IH:在规定的环境温度和控制极断路时,维持元件导通的最小电流.10.7如何用万用表粗测晶闸管的好坏?良好的晶闸管,其阳极A与阴极K之间应为高阻态.所以,当万用表测试A-K间的电阻时,无论电表如何接都会为高阻态,而G-K间的逆向电阻比顺向电阻大.表明晶闸管性能良好.10.8晶闸管的控制角和导通角是何含义?晶闸管的控制角是晶闸官元件承受正向电压起始到触发脉冲的作用点之间的点角度.导通角是晶闸管在一周期时间内导通得电角度.10.9有一单相半波可控整流电路,其交流电源电压U2=220V,负载电阻RL=10Ω,试求输出电压平均值Ud的调节范围,当α=π/3,输出电压平均值Ud和电流平均值Id为多少?并选晶闸管.Ud=1/2π∫απ√2sinwtd(wt)=0.45U2(1+cosα)/2=0.45*220(1+1)/2=99V输出电压平均值Ud的调节范围0-99V当α=π/3时Ud=0.45U2(1+cosα)/2
=0.45*220*(1+0.866)/2=92.4V输出电压平均值Ud=92.4V电流平均值Id=Ud/RL=92.4/10=9.24A10.10续流二极管有何作用?为什么?若不注意把它的极性接反了会产生什么后果?续流二极管作用是提高电感负载时的单相半波电路整流输出的平均电压。导通时,晶闸管承受反向电压自行关断,没有电流流回电源去,负载两端电压仅为二极管管压降,接近于零,所以由电感发出的能量消耗在电阻上。若不注意把它的极性接反会造成带电感性负载不会得电。10.11试画出单相半波可控整流电路带不同性质负荷时,晶闸管的电流波形与电压波形。
U2UgUvsivs带电阻性负载的可控整流电路ttttU2UgUvsivs带电感性负载的可控整流电路ttttU2UgUvsivs带电感性负载有续流二极管的可控整流电路tttt10.12有一电阻型负载,需要直流电压Ud=60V,电流Id=30A供电,若采用单相半波可控整流电路,直接接在220V的交流电网上,试计算晶闸管的导通角θ。Ud=0.45U2(1+cosα)/260=0.45*220*(1+cosα)/2α=77.8α+θ=π
θ=102.2晶闸管的导通角θ10.13有一电阻负载需要可调直流电压Ud=0V~60V,电流Id=0A~10A,现选用一单相半控桥式可控制流电路,试求电源变压器副边的电压和晶闸管与二极管的额定电压和电流。Ud=0.9U2(1+cosα)/260=0.9*U2(1+1)/2U2=66.7V电源变压器副边的电压为66.7V10.14三相半波可控整流电路,如在自然换相点之前加入触发脉冲会出现什么现象?画出这时负载侧的电压波形图。三相半波可控整流电路,如在自然换相点之前加入触发脉冲Ua使VS1上电压为正,若t1时刻向VS1控制极加触发脉冲,VS1立即导通,,当A相相电压过零时,VS1自动关断.
U2tUgt10.15三相半波电阻负载的可控整流电路,如果由于控制系统故障,A相的触发脉冲丢失,试画出控制角α=0时的整流电压波形。
U2tU2tUvst10.16三相桥式全控整流电路带电阻性负载,如果有一只晶闸管被击穿,其它晶闸管会受什么影响?如果有一只晶闸管被击穿,其它晶闸管会受影响.造成三相桥式全控整流电路失控.10.17晶闸管对触发电路有哪些要求?触发电路主要有那三个环节?每个环节的功能是什么?晶闸管对触发电路的要求是①触发电路应能够供给足够大的触发电压和触发电流.②由于晶闸管由截止状态到完全导通需要一定的时间因此,触发脉冲的宽度必须在10微秒以上,才能保证晶闸管可靠触发.③不触发时,触发电路的输出电压应该小于0.15-0.20V为了提高抗干扰能力,必要时可在控制
极上加一个1V-2V的负偏压.④触发脉冲的前沿要陡,前沿最好在10微秒以上.⑤在晶闸管整流等移相控制的触发电路中,触发脉冲应该和主回路同步.10.18单结晶体管自震荡电路的震荡频率是由什么决定的?为获得较高的震荡频率,减小充电电阻R与减小电容C效果是否一样?R的大小受哪些因素的限制?为什么?振荡周期T=RCln1/1-η,主要决定于放电时间常数RC.减小充电电阻R与减小电容C效果不一样,R的大小受峰点电流和谷点电流的限制.因为为确保单接晶体管由截止转为导通,实际通过充电电阻流入单接晶体管的电流,必须大于峰点电流.当发射极电压等于谷点电压时,为确保单结晶体管导通后恢复截止,实际流过单接晶体管的电流必须小于谷点电流.10.19为什么晶闸管的触发脉冲必须与主电路的电压同步?因为实际应用的晶闸管触发电路,必须是触发脉冲与主电路电压同步,要求在晶闸管承受正向电压的半周内,控制极获得一个正向的触发脉冲的时刻相同,否则由于每个正半周的控制角不同,输出电压就会忽大忽小的波动,为此,在电源电压正半周经过零点时,触发电路的电容c必须把电全部放掉,在
下一个正半周重新从零开始充电,只有这样才能确保每次正半周第一个触发脉冲出现的时间相同.10.20在单结晶体管触发电路中,改变电阻R为什么能实现移相?移相的目的是什么?移相控制时只要改变R,就可以改变电容电压uc上升到Up的时间,亦即改变电容开始放电产生脉冲使晶闸管触发导通的时刻,从而达到移向的目的.10.21试简述有源逆变器的工作原理,逆变得条件和特点是什么?有源逆变器的工作原理在ωt1时刻触发VS1使之导通,ud=uA,在1-2区间,ud>Ud.id是增加的,感应电势eL的极性是左正右负,电感存储能量,到2点时,ud0,要使电路工作于逆变状态,必须使Ud及E的极性与整流状态相反,并且要求E>=Ud,只有满足这个条件才能将直流侧电能反送到交流电网实现有源逆变.10.22试论述单相晶闸管桥式逆变器的基本工作原理,如何实现电压控制?逆变器的换流过程是怎样进行的?单相晶闸管桥式逆变器,如果VS1导通,UAN=Ud,如果VS3
导通时,B点相对于负极N电位正,即UBN=Ud.当VS1关断而VS2导通时,A点电位为负,当关断VS3而触发导通VS4时,B点电位为负,因此周期性得导通和关断VS1和VS2就会产生一系列正脉冲电压UAN,同样周期性的导通和关断VS3和VS4,会产生同样的正脉冲电压.控制α的导通时间就会实现电压的控制.10.23晶闸管元件串联时,应注意哪些问题?元件的均流,均压方法有那几种?晶闸管元件串联时,应注意均压问题,元件的均压问题可采取在每个串联工作的元件两端并联点组合电容元件,或才采取用变压器次级线圈分组的方法。元件的均流措施有以下三种方法串联电阻均流,串电抗均流,变压器分组均流。10.24晶闸管元件的过电压、过电流保护有哪些方法?晶闸管元件的过电压保护方法有阻容保护装置,可以保护交流,也可以保护支流侧。硒堆和压敏电阻电阻保护。晶闸管元件的过电流保护方法有:设置快速熔断器,装设过流继电器及快速开关,整流触发脉冲移相保护。
第十一章11.1何谓开循环控制系统?何谓闭循环系统?两者各有什么优缺点?系统只有控制量(输出量)的单向控制作用,而不存在被控制量的影响和联系,这称之为开环控制系统.优点是结构简单能满足一般的生产需要.缺点是不能满足高要求的生产机械的需要.负反馈控制系统是按偏差控制原理建立的控制系统,其特点是输入量与输出量之间既有正向的控制作用,又有反向的反馈控制作用,形成一个闭环控制系统或反馈控制系统.缺点是结构复杂,优点可以实现高要求的生产机械的需要.11.2什么叫调速范围、静差度?它们之间有什么关系?怎样才能扩大调速范围。电动机所能达到的调速范围,使电动机在额定负载下所许可的最高转速何在保证生产机械对转速变化率的要求前提下所能达到的最低转速之比(D).转速变化率即调速系统的静差度电动机有理想空载到额定负载时转速降与理想空载转速的比值(S)两者之间的关系时D=nmaxS2/ΔnN(1-S2),在保证一定静差度的前提下,扩大系统调速范围的方法是提高电动机的机械特性的硬度以减小ΔnN11.3生产机械对调速系统提出的静态、动态技术的指标有哪些?为什么要提出这些技术指标?生产机械对调速系统提出的静态技术的指标有静差度,调速范围,调速的平滑性.动态技术指标有最大超调量,过渡过程时间,振荡次数.
因为机电传动控制系统调速方案的选择,主要是根据生产机械对调速系统提出的调速指标来决定的.11.4为什么电动机的调速性质应与生产机械的负载特性想适应?两者如何配合才能算适应。电动机在调速过程中,在不同的转速下运行时,实际输出转矩和输出功率能否达到且不超过其润许长期输出的最大转矩和最大功率,并不决定于电动机本身,而是决定于生产机械在调速过程中负载转矩及负载功率的大小和变化规律,所以,为了使电动机的负载能力得到最充分的利用,在选择调速方案时,必须注意电动机的调速性质与生产机械的负载特性要适合.负载为恒转矩型的生产机械应近可能选择恒转矩性质的调速方法,且电动机的额定转矩应等于或略大于负载转矩,负载为转矩恒功率型的生产机械应尽可能选用恒功率性质的调速方法,且电动机的额定功率应等于或略大于生产机械的负载转矩.11.5有一直流调速系统,其高速时理想的空载转速n01=1480r/min,低速时的理想空载转速n02=157/min,额定负载时的转矩降ΔnN=10r/min,试画出该系统的静特性.求调速范围和静差度。调速范围D=n01/n02=1480/157=9.23静差度S=ΔnN/n01=10/1480
=0.006814801470r/minTN11.6为什么调速系统中加负载后转速会降低,闭环调速系统为什么可以减少转速降?当负载增加时,Ia加大,由于IaR∑的作用,所以电动机转矩下降。闭环调速系统可以减小转速降是因为测速发电机的电压UBR下降,是反馈电压Uf下降到Uf’,但这时给定电压Ug并没有改变,于是偏差信号增加到ΔU‘=Ug-Uf’,使放大器输出电压上升到Uk’,它使晶闸管整流器的控制角α减小整流电压上升到Ud’,电动机转速又回升到近似等于n0。11.7为什么电压负反馈顶多只能补偿可控整流电源的等效内阻所引起的调速降?因为电动机端电压即使由于电压负反馈的作用而维持不变,但负载增加时,电动机电枢内阻Ra所引起的内压降仍然要增大,电动机速度还是要降低。11.8电流正负反馈在调速系统中起什么作用?如果反馈强度调
得不适当会产生什么后果?电流正负反馈,是把反映电动机电枢电流大小的量IaRa取出,与电压负反馈一起加到放大器输入端,由于市政反馈,当反馈电流增加时,放大器输入信号也增加,使晶闸管整流输出电压Ud增加,以次来补偿电动机电枢电阻所产生的压降,由于这种反馈方式的转降落比仅有电压负反载时小了许多,因此扩大了调速范围。如果反馈强度调得不适当会产生不能准确的反馈速度,静特性不理想。。11.9为什么由电压负反馈和电流正反馈一起可以组成转速反馈调速系统?因为由于电压反馈调速系统对电动机电枢电阻压降引起的转速降落不能与以补偿,因而转速降落较大,静特性不够理想,使润许的调速范围减小。为了补偿电枢电阻压降IaRa,就需要在电压反馈的基础上再增加一个电流正负反馈环节。11.10电流截止负反馈的作用是什么?转折点电流如何选?堵转电流如何选?比较电压如何选?电流负反馈会使ΔU随着负载电流的增加而减小,会使电动机的速度迅速降低,可是这种反馈却可以人为地造成阻转,防止电枢电流过大而烧坏电动机。堵转电流IAo=(2—2.5)IAn一般转折电流I0为额定电流IAn的1.35倍.且比较电压越大,则电流截止负载的转折点电流越大,比较电压小,则转折点电流小.一般按照转折电流I0=KIAn选取比较电压.
11.11某一有静差调速系统的速度调节范围为75r/min~1500r/min,要求静差度S=2%,该系统允许的静态速降是多少?如果开环系统的静态速降是100r/min,则闭环系统的开环放大倍数应有多大?S=ΔnN/n00.02=ΔnN/1500ΔnN=30闭环系统的开环放大倍数为K=γKPKS/Ce11.12某一直流调速系统调速范围D=10,最高额定转速nmax=1000r/min,开环系统的静态速降是100r/min。试问该系统的静差度是多少?若把该系统组成闭环系统,保持n02不变的情况下,是新系统的静差度为5%,试问闭环系统的开环放大倍数为多少?D=nmax/nmin10=1000/nminnmin=100r/minD=nmaxS2/ΔnN(1-S2)10=1000S2/100(1-S2)S2=0.5该系统的静差度是0.511.13X2010A型龙门铣床进给拖动系统的移相触发器有哪几个部分组成?试说明各个部分的作用和工作原理。X2010A型龙门铣床进给拖动系统的移相触发器是矩齿波形成器,移相控制,脉冲形成三个环节组成.矩齿波形成器的作用是为了扩大移相范围,U2滞后U160度,增加灵活和增加线性度,U1超前晶闸管阳极电
压uc30度.移相控制环节的主要作用是利用u1c与控制电压Uco相比较,去控制晶体管1VT的通断而实现得.脉冲输出环节主要由晶闸管4VT和脉冲变压器T组成.当u1c刚大于控制电压Uco1时,二极管7V和电阻9R充电,4VT导通,在2C充电为饱合和或脉冲变压器铁心未饱和前,T负边绕阻感应出平顶脉冲电压.在2C充电完毕,T负边绕阻感应平顶脉冲电压消失11.14积分调节器在调速系统中为什么能消除静态系统的静态偏差?在系统稳定运行时,积分调节器输入偏差电压△U=0,其输出电压决定于什么?为什么?因为在积分调节器系统中插入了PI调节器是一个典型的无差元件,它在系统出现偏差时动作以消除偏差.当偏差为零时停止动作.可控整流电压Ud等于原晶态时的数值Ud1加上调节过程进行后的增量(ΔUd1+ΔUd2),在调节过程结束时,可控整流电压Ud稳定在一个大于Ud1的新的数值Ud2上.增加的那一部分电压正好补偿由于负载增加引起的那部分主回路压降.11.15在无静差调速系统中,为什么要引入PI调节器?因为无差系统必须插入无差元件,它在系统出现偏差时动作以消除偏差.当偏差为零时停止工作.PI调节器是一个典型的无差元件.所以要引入.11.16无静差调速系统的稳定精度是否受给定电源和测速发电机精度的影响?为什么?无静差调速系统的稳定精度受给定电源和测速发电机精度的影响,因
为给定电源的信号要与速度反馈信号比较,速度调节信号要经过测速发电机转化为电压信号.11.17由PI调节器组成的单闭环无静差调速系统的调速性能以相当理想,为什么有的场合还要采用转速、电流双闭环调速系统呢?因为采用PI调节器组成速度调节器ASR的但闭环节调速范围,既能得到无静差调节,又能获得较快的动态相应,速度调节系统基本满足要求.但在生产机械经常处于正反转工作状态,为了提高生产率,要求尽量缩短启动,制动和反转过渡过程的时间,当然可用加大过渡中的电流即加大动态转矩来时间,但电流不能超过晶闸管和电动机的许可值,为了解决这个矛盾可以采用电流截止负反馈,这样就要求由一个电流调节器.11.18双闭环调速系统稳态运行时,两个调节器的输入偏差(给定与反馈之差)是多少?它们的输出电压是多少?为什么?来自速度给定电位器的信号Ugn与速度反馈信号Ufn比较后,偏差ΔUn=Ugn-Ufn,送到速度调节器ASR的输入端,速度调节器的输入Ugi与速度反馈信号Ufi比较后,偏差为ΔUi=Ugi-Ufi,送到电流调节器ACR的输入端,电流调节器的输入Uk送到触发器,以控制可控整流器,整流器为电动机提供直流电压Ud.11.19在双闭环调速系统中转速调节器的作用是什么?它的输出限副值按什么来整定?电流调节器的作用是什么?它的限副值按什么来整定?转速调节器的作用是产生电压负反馈(速度反馈信号Ufn),与给定电位
器的信号Ugn.相比较.它的输出限副值按电压整定,电流调节器的作用是把速度调节器的输出作为电流调节器ACR的给定信号,与电流反馈信号Ufi比较.它的限副值按电流整定.11.20欲改变双闭环调速系统的转速,可调节什么参数?改变转速反馈系数γ行不行?为改变最大允许电流(堵转电流),则应调节什么参数?欲改变双闭环调速系统的转速,可调节电压参数和电流参数,改变转速反馈系数γ行,未改变最大许可电流,则应调节Ufi.11.21直流电动机的调速系统可以采取哪些办法组成可逆系统。直流电动机的调速系统可以采取1;利用接触器进行切换的可逆线路,2利用晶闸管切换的可逆线路3采用两套晶闸管变流器的可逆线路.11.22试论述三相半波反并联可逆线路逻辑控制无环流工作的基本工作原理。电动机要正转时,应控制供养机组的α1角由90度逐渐减小,与此同时封锁供养机组的触发脉冲.共阴极组输出直流电压Udα1由零逐渐增加,电动机启动并正转加速.若欲使电动机制动应利用逻辑电路封锁共阴极组触发脉冲使之停止给电动机供电,电动机由于惯性转速瞬间降不下来,其反电动势的极性为上正下负,开放共阳极阻使之投入工作,控制共阳极组的α2角由180度逐渐减小,共阳极组输出直流电压平均值Udβ2的极性为上正下负,且使Udβ2<=E,以产生足够的制动电流,使电动机转速很快制动到零,当电动机转速制动为零时,若使共阳极组电路
的α2角在0-90度范围变化,则输出电压Udβ2逐渐增加,即行为上负下正,电动机启动并反转加速,电动机工作在反转电动状态.11.23试简述直流脉宽调速系统的基本工作原理和主要特点。基本工作原理:三相交流电源经整流滤波变成电压恒定的直流电压,VT1~VT4为四只大功率晶体三极管,工作在开关状态,其中,处于对角线上的一对三极管的基极,因接受同一控制信号而同时导通或截止。若VT1和VT4导通,则电动机电枢上加正向电压;若VT2和VT3导通,则电动机电枢上加反向电压。主要特点:(1)主电路所需的功率元件少。(2)控制电路简单。(3)晶体管脉宽调制(PWM)放大器的开关频率一般为1KHZ~3KHZ,有的甚至可达5KHZ。它的动态响应速度和稳速精度等性能指标比较好。晶体管脉宽调制放大器的开关频率高,电动机电枢电流容易连续,且脉动分量小。因而,电枢电流脉动分量对电动机转速的影响以及由它引起的电动机的附加损耗都小。4)晶体管脉宽调制放大器的电压放大系数不随输出电压的改变而变化,而晶闸管整流器的电压放大系数在输出电压低时变小。11.24双极性双极式脉宽调节放大器是怎样工作的?双极性双极式脉宽调制放大器中四只晶体管分为两组,VT1和VT4为一组,VT2和VT3为另一组。同一组中的两只三极管同时导通,同时关断,且两组三极管之间可以是交替地导通和关断。11.25电动机停止不动,但电枢电压U的瞬时值不等于零,而(
是正、负脉冲电压的宽度相等,即电枢电路中流过一个交变的电流ia。这个电流一方面增大了电动机的空载损耗,但另一方面它使电动机发生高频率微动,可以减小静摩擦,起着动力润滑的作用。11.25在直流脉宽调速系统中,当电动机停止不动时,电枢两端是否还有电压,电枢电路中是否还有电流?为什么?电动机停止不动,但电枢电压U的瞬时值不等于零,而是正、负脉冲电压的宽度相等,即电枢电路中流过一个交变的电流ia。这个电流一方面增大了电动机的空载损耗,但另一方面它使电动机发生高频率微动,可以减小静摩擦,起着动力润滑的作用。11.26试论述脉宽调速系统中控制电路各部分的作用和工作原理。控制电路由(1)速度调节器ASR和电流调节器ACR(2)三角波发生器由运算放大器N1和N2组成,N1在开环状态下工作,它的输出电压不是正饱和值就是负饱和值,电阻R3和稳压管VZ组成一个限幅电路,限制N1输出电压的幅值。N2为一个积分器,当输入电压U1为正时,其输出电压U2向负方向变化;当输入电压U1为负时,其输出电压U2向正方向变化。当输入电压U1正负交替变化时,它的输出电压U2就变成了一个三角波。(3)电压-脉冲变换器当运算放大器N工作在开环状态。当它的输入电压极性改变时,其输出电压总是在正饱和值和负饱和值之间变化,这样,它就可以实现把连续的控制电压UK转换成脉冲电压,再经限幅器(由电阻R4和二极管V组成)削去脉冲电压的负半波,在BU的输
出端形成一串正脉冲电压U4。(4)脉冲分配器及功率放大脉冲分配器其作用是把BU产生的矩形脉冲电压U4(经光电隔离器和功率放大器)分配到主电路被控三极管的基极。当U4为高电平时,门1输出低电平,一方面它使门5的输出UC1,4为高电平,V1截止,光电管B1也截止,则UR1=0,经功率放大电路,其输出Ub1,4为低电平,使三极管VT1、VT4截止;另一方面门2输出高电平,其后使门6的输出UC2,3为低电平,V2导通发光,使光电B平,使三极管VT2、VT3可以导通。反之,当U4为高电平时,UC2,3为高电平,B2截止,Ub2,3为低电平,使VT2、VT3截止;而UC1,4为低电平,B1导通,Ub1,4为高电平,使VT1、VT4可以导通。随着电压U4的周期性变化,电压Ub1,4与Ub2,3正、负交替变化,从而控制三极管VT1、VT4与VT2、VT3的交替导通与截止。功率放大电路的作用是把控制信号放大,使能驱动大功率晶体三极管。5)其他控制电路过流失速保护环节。当电枢电流过大和电动机失速时,该环节输出低电压,封锁门5和门6,其输出UC1,4和UC2,3均为高电平,使Ub1,4和Ub2,3均为低电平,从而关断三极管VT1~VT4,致使电动机停转。*11.27微型计算机控制的直流传动系统有哪些主要特点?微型机算计机控制的直流传动系统这种系统的控制规律主要由软件实现,只需配备少量的接口电路就能形成一个完整的控制系统;其硬件结构简单,可以通过容易更改的软件来实现不同的控管B2导通,则UR2为高电平,经功率放大后,其输出Ub2,3为高电(
制规律或不同的性能要求。此外单片微机除了能实现系统的控制外,还具有系统的保护、诊断和自检等功能。
第十二章12.1试述电磁转差离合器的工作原理,其工作原理与鼠笼式异步电动机的工作原理有何异同?为什么?答:电磁转差离合器的工作原理是基于电磁感应原理通过改变励磁电流进行工作.它由主动和从动两个基本部分组成。鼠笼式异步电动机的工作原理是基于定子旋转磁场和转子电流相互作用,两者都是基于电磁感应原理.12.2试说明JZT1型转差离合器调速系统的调速过程。答:JZT型采用速度负反馈使电动机在负载增加导致转速降低以后控制系统自动使励磁电流增加,从而使转速上升达到稳定转速的目的。0形。12.4为什么说调压调速方法不太适合于长期工作在低速的工作机12.3三相调压电路如题12.3图所示,试画出α=120试负载电流波
械?答:改变定子电压电动机的转速变化范围不大。如果要使电动机能在低速度运行,一方面拖动装置运行不稳定,另外随着电动机转速的降低会引起转子电流相应增大。,可能引起过热而损坏电动机,所以不适合。12.5为什么调压调速必须采用闭环控制才能获得较好的调速特性,其根本原因何在?答:因为即使增加电动机转子绕阻的电阻,调整范围仍不大,且低速时运行性不好,不能满足生产机械的要求。因此为保证低速时的机械性硬度,又能保证一定的负载能力,所以采用转速负反馈构成闭环系统。图中的晶闸管交流调压系统,可根据控制信号u的大小将电源电压u1改变为不同的可变电压u‘x控制信号的大小。由给定信号ug和来自测速发电机的测速反馈信号ufn的茶来调节。当负载稍有增加引起转速下降时,则正比与转速的ufn也将减小。由于u=ug-ufn,故u随ufn的减小儿子动增大。从而使输出电压u‘x增大,电动机将产生较大转矩以与负载转矩平衡。此时的机械特性基本上是一簇平行的特性。这种闭环调速系统中,只要能平滑地改变电子电压,就能平滑调节异步中的转速,同时低速的特性较硬,调速的范围较宽。
u1ug晶闸管调压系统uufnu‘xMnBR给定12.6串级调速的基本原理是什么?串级调速引入转子回路的电势,其频率有何特点?答:串级调速就是在异步电动机转子电路内引入附加电势Ead,以调节异步电动机的转速。引入电势的方向可与转子电动势E2方向相同或相反,其频率则与转子频率相同。原理:如果电动机的转速仍在原来的数值上,即S值未变动,则串入附加电势后,电流I2必然减小,从而使电动机产生的转矩T也随之减小。T小于负载转矩T2时,电动机的转速不得不减小下来,随着电动机转速减小,转子电流I2也将增加。当I2增加到时电动机产生的转矩T又重新等于T2后,电动机又稳速运行,但此时的转速以较原来的为低,这样就达到了调速的目的。12.7船级调速系统电动机的机械与正常接线时电动机的固有机械特性比较,有什么不同之处?答:若引入的附加电势愈大,则n0愈小,即电动机的转速愈低。12.8试述电压型变频调速系统逆变器的换流原理。
‘‘作为LC振荡电路的充放开关,换流时主晶闸管的关断是靠触发辅助换流晶闸管来实现的,即通过辅助晶闸管导通给主晶闸管施以反向电压,而辅助晶闸管本身的关断则是由LC串联谐振申路中的电流反向来实现的。12.9为什么说变斌调压电源对异步电动机供电是比较理想的交流调速方案?答:采用恒磁通φ协调控制的变频器原则,使电动机的断电压和频的比值u/f应保持一定。异步电动机在低速低频运行时,定子电阻压降的影响,使电动机最大转矩Tmax有所降低,因此设置函数发生器单元以补偿其电阻压降的影响。使其在低频时仍保持有足够的电压值形成恒转矩变频调速系统。12.10脉宽调制变频其中,逆变器各开关元件的控制信号如何获取?试画出波形图。单极性正旋波脉宽调制法采用正旋波与三角波相交来获取一系列按正旋规律变化的矩形脉冲,三角波上下宽度线性变化的波形,所以,任何一个光滑的曲线与三角波相交时,都会得到一组等幅的脉冲宽度正比于该函数值得矩形脉冲,用正旋波与三角波相交,得到一组矩形脉冲作为逆变器各开关元件的控制信号.答:Vs1和Vs2为主晶闸管。Vs1和Vs2为辅助换流闸管,
12.11交-直-交变频与交-交变频有何异同?答:交—直—交变频首先将电网中的交流电整成直流电,再通过逆变器将直流电逆变为频率可调的交流电。前者主要采用晶闸管整流器来完成。逆变器的作用与整流器的作用相反,一般包括逆变电路及换流电路两部分。交—交变频是直接将固定频率的交流电能变成所需频率的电能,而不经过中间直流环节,也称直接变频。12.12简述矢量变换控制的基本原理。答:矢量变换控制的基本思路,是以产生同样的旋转磁场为准则,建立三相交流绕阻电流,两组交流绕阻电流和在旋转坐标上的正交扰阻直流之间的等效关系。给固定的对称绕阻通以平衡电流产生旋转磁场φ。如果取磁通φ的位置和M绕阻的平面正交,就和等效的直流电动机绕阻没有差别了。其中M绕阻相当于励磁绕阻,T绕阻相当于电枢绕阻。由此可见,将异步电动机模拟成直
流电动机相似进行控制,就是将A,B,C静止坐标系表示的一部电动机矢量变换到按转子磁通方向为磁场定向并以同步速度旋转的M—T直角坐标系上,即进行适量的坐标变换。可以证明,在M—T直角坐标系上,异步电动机的数学模型和直流电动机的数学模型和直流电动机的数学模型是极为相似的。因此,人们可以像控制直流电动机一样取控制异步电动机,以获得优越的调速性能。12.13什么叫无换向器电动机?它有什么特点?答:无换向器电动机,是由一台同步电动机和一套简单的逆变器组成,构造简单,没有换向器。特点:其工作原理,特性及调速方式与直流电动机相似。根据容量不同,有晶体管电动机和晶闸管电动机。有两种不同的调速方式为直流无换向器电动机调速方式和交流无换向器电动机调速方式。12.14无换向器电动机调速系统和直流电动机调速系统有哪些异同点?无换向器电动机调速系统和直流电动机调速系统基本相同,也是电流环和速度环组成的双闭环调速系统,无换向器电动机本身的控制系统,主要包括一个位置检测器PS和一个γ脉冲分配器.无换向器电动机调速均匀,调速范围宽,不会产生火花,适应恶劣环境和易燃易爆场合,与同步电动机相比,启动方便,运行稳定.
第十三章13.1通过分析步进电动机的工作原理和通电方式,可得出哪几点结论?步进电动机的位移和输入脉冲数严格成正比,这就不会引起误差的积累.其转速与脉冲频率和步矩角有关,控制输入脉冲数量,频率即电动机各组的接通次序,可以得到各种需要的运行特征.13.2步进电动机的运行特性与输入脉冲频率有什么关系?当点流为矩形波频率增加时,由于电动机绕组中感应又阻止电流变化的作用,因此电流波形发生畸变.当脉冲频率很高时,电流还未来得及赶上稳定值就开始下降,与时电流幅值降低,因而产生的转矩减小,致使带负载的能力下降,频率过高会使不仅电动机启动不了,或运行时停下来.13.3列出三相六拍形分配器的反向环形分配表。存储单元地址单元内容对应通电电相K+0K+1K+2K+3K+4K+501H(0001)05H(0101)04H(0100)06H(0110)02H(0010)03H(0011)ACACBCBAB
13.4试修改环形分配器子程序,以实现步进电动机的反向运转。HXFB:DYY:ROUT:LDA,BCPA,03HJRZ,DYYINCAJRROUTLDA,00HLDL,ALDL,00HADDHL,KLDA,(HL)OUT(PIODRA),ARET13.5步进电动机对驱动电路有何要求?常用驱动电路有什么类型?各有什么特点?步进电动机的驱动电路实际上是一个脉冲放大电路,使脉冲具有一定的功率驱动能力,由于功率放大输出直接驱动电动机绕阻,因此,功率放大的性能对步进电动机的运行性能有很大的影响.因此对驱动电路的要求是如何提高不尽电动机的快速性和平稳性.类型由1但电压限流型驱动,电阻R上有功率消耗为了提高快速性需要加大R的组织,由于阻值加大电源的电压也势必提高,功率消耗也进一步加大正因为这样,此电路使用受到限制.
2高低压切换型驱动电压优点:功耗小,启动力矩大,突跳频率和工作频率高.缺点:大功率管的数量要多一倍,增加了驱动电源.13.613.7使用步进电动机需注意哪些主要问题?①驱动电源的优劣对不仅电动机控制系统的运行影响极大,使用时要特别注意,需要根据运行要求,尽量采用先进的驱动电源,以满足不仅电动机的运行性能.②若所带负载转矩较大,则应在低频下启动,然后在上升到工作频率,停车时也应从工作频率下降到适应频率在停车.③在工作过程中,应尽量避免由于负载突变而引起误差.④若在工作过程中发生失步现象,首先应检查负载是否过大.电源是否正常,在检查驱动电源输出波形是否正常.在处理问题时不应随便更换元件.步进电动机的步距角之含义是什么?一台步进电动机可以有两个步距角,例如,3o/1.5o,这是什么意思?什么是单三拍、单双六拍和双六拍?每当输入一个电脉冲时,电动机转过的一个固定的角度,这个角度称之为步矩角.一台步进电动机有两个步矩角,说明它有两种通电方式,3o得意思是单拍时的步矩角.1.5o得意思是单双拍或双拍似的步矩角.单三拍:每次只有一相绕阻通电,而每个循环只有三次通电单双六拍:第一次通电有一相绕阻通电,然后下一次又两相通电,这样交替循环运行,而每次循环只有六次通电.
双三拍:每次又两相绕阻通电,每个循环由六次通电.13.8一台五相反应式步进电动机,采用五相十拍运行方式时,步距角为1.5o,若脉冲电源的频率为3000Hz,试问转速是多少?n=βf*60/2π=1.5*3000*60/2*3.14=42993.6r/min转速是42993.6r/min13.9一台五相反应式步进电动机,其步距角为1.5o/0.75o,试问该电机的转子齿数是多少?1.5=360/ZKM1.5=360/Z*5*1Z=48电机的转子齿数是4813.10步距角小、最大静转距大的步进电动机,为什么启动频率和运行频率高?n=βf*60/2πf=nπ/β*30β越小运行f就越高13.11负载转矩和转动惯量对步进电动机的启动频率和运行频率有什么影响?T
0f/Hz负载转矩和转动惯量越大,步进电动机的启动转矩和运行频率越高'
您可能关注的文档
- 《机械工程控制基础》课后题答案.doc
- 答案_北京理工大学出版社_修改.pdf
- 《机械设计》期末考试试题库含答案详解8套.doc
- 《机械设计基础》典型试题及答案(10套).doc
- 《机械设计基础》杨可桢 习题答案1-18章.docx
- 《机械设计基础》杨晓兰版(机械工业出版社)课后习题答案.doc
- 《机械设计基础》试题库及答案.doc
- 《机械设计基础》试题库及答案.pdf
- 《机械设计基础》试题库及答案_(1).doc
- 《机电工程管理与实务》历年真题及答案解析.pdf
- 学》第五版_刘鸿文_习题答案B.pdf
- 学》第五版_刘鸿文_习题答案C.pdf
- 学》第五版_刘鸿文_习题答案F.pdf
- 学》第五版_刘鸿文_习题答案G.pdf
- 学》第五版_刘鸿文_习题答案I.pdf
- 《材料力学》邱棣华 课后答案.pdf
- 《材料成型测试技术》课后习题及实验指导书.doc
- 《材料成形技术基础》习题集新版答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明