
- 1.14 MB
- 2022-04-22 11:34:44 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
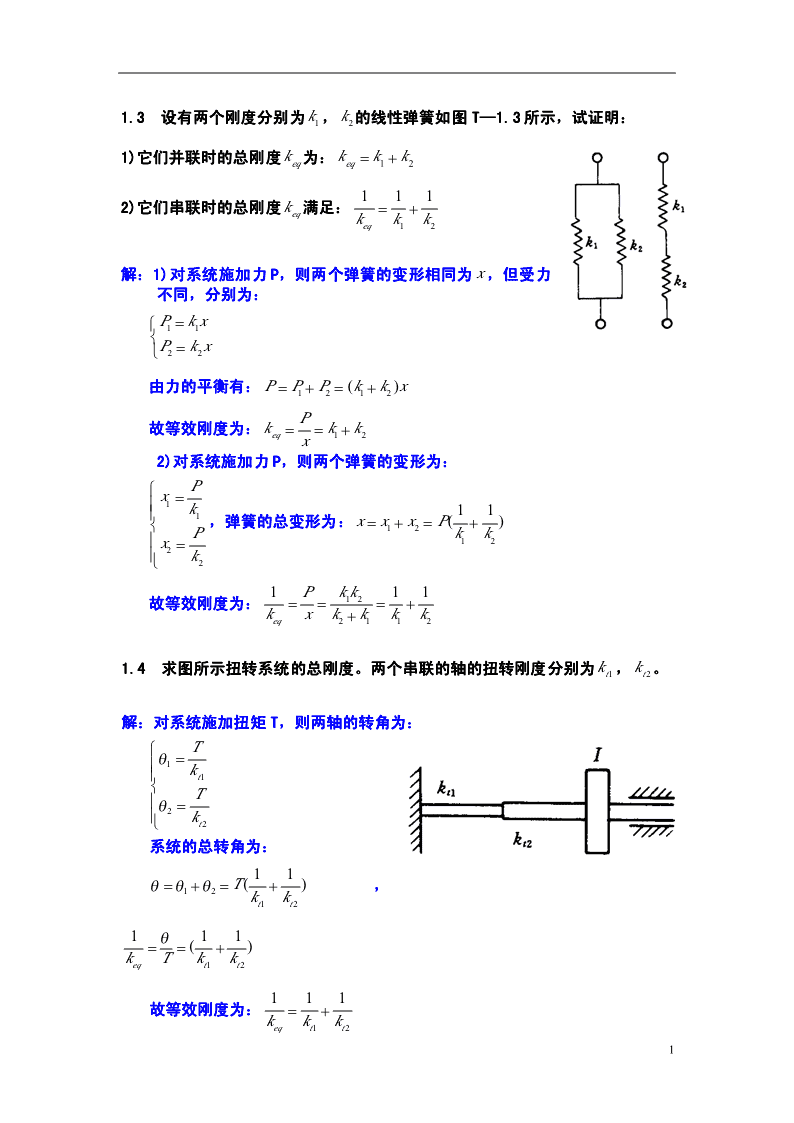
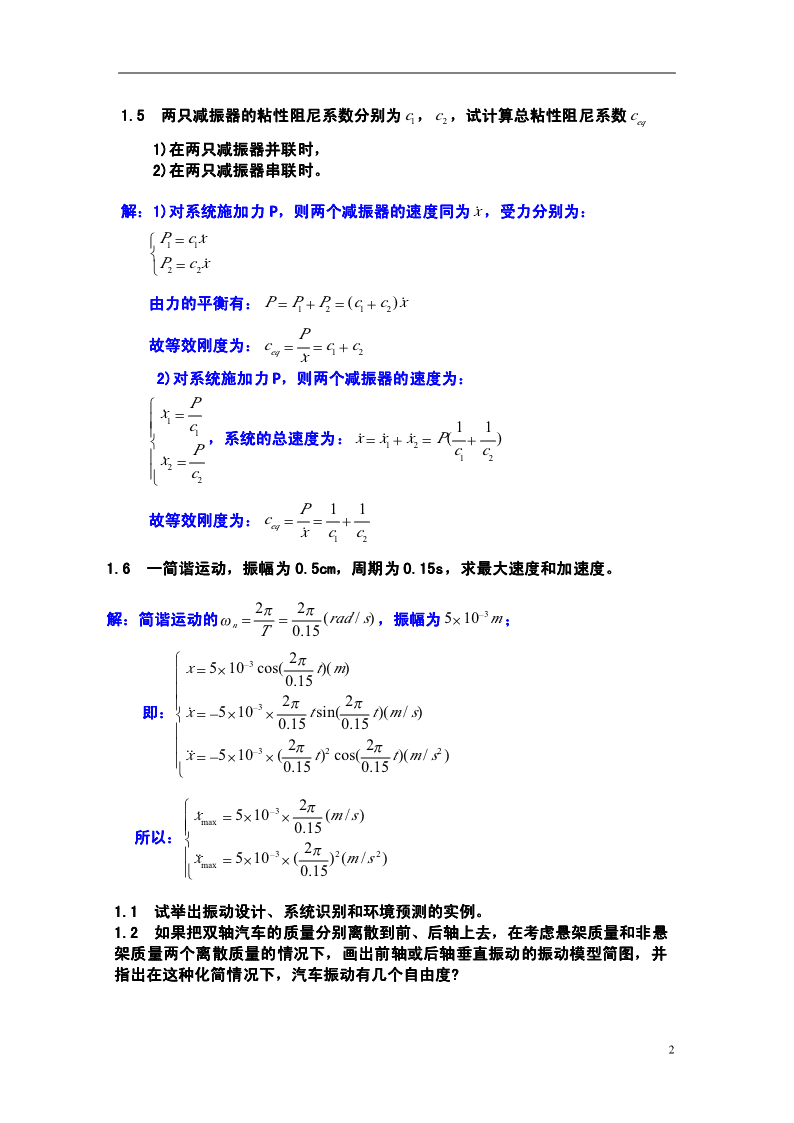
'1.3设有两个刚度分别为k,k的线性弹簧如图T—1.3所示,试证明:121)它们并联时的总刚度k为:k=k+keqeq121112)它们串联时的总刚度k满足:=+eqkkkeq12解:1)对系统施加力P,则两个弹簧的变形相同为x,但受力不同,分别为:⎧P=kx11⎨⎩P=kx22由力的平衡有:P=P+P=(k+kx)1212P故等效刚度为:k==k+keq12x2)对系统施加力P,则两个弹簧的变形为:⎧Px=⎪1⎪k111⎨,弹簧的总变形为:x=x1+x2=P(+)Pkk⎪x=122⎪k⎩21Pkk1112故等效刚度为:===+kxk+kkkeq21121.4求图所示扭转系统的总刚度。两个串联的轴的扭转刚度分别为k,k。t1t2解:对系统施加扭矩T,则两轴的转角为:⎧Tθ=⎪1⎪kt1⎨T⎪θ=2⎪k⎩t2系统的总转角为:11θ=θ+θ=T(+),12kkt1t21θ11==(+)kTkkeqt1t2111故等效刚度为:=+kkkeqt1t21
1.5两只减振器的粘性阻尼系数分别为c1,c2,试计算总粘性阻尼系数ceq1)在两只减振器并联时,2)在两只减振器串联时。解:1)对系统施加力P,则两个减振器的速度同为ẋ,受力分别为:⎧P=cẋ11⎨⎩P=cẋ22由力的平衡有:P=P+P=(c+cx)̇1212P故等效刚度为:c==c+ceq12ẋ2)对系统施加力P,则两个减振器的速度为:⎧Pẋ=⎪1⎪c111⎨,系统的总速度为:ẋ=ẋ1+ẋ2=P(+)Pcc⎪ẋ=122⎪c⎩2P11故等效刚度为:c==+eqẋcc121.6一简谐运动,振幅为0.5cm,周期为0.15s,求最大速度和加速度。2π2π−3解:简谐运动的ω==(rads/),振幅为510×m;nT0.15⎧−32πx=×510cos(tm)()⎪0.15⎪⎪−32π2π即:⎨ẋ=−×510×tsin(tms)(/)0.150.15⎪⎪−32π22π2⎪̇̇x=−×510×(t)cos(tms)(/)⎩0.150.15⎧−32πẋ=×510×(/)ms⎪⎪max0.15所以:⎨⎪ẋ̇=×510−3×(2π)(/2ms2)max⎪⎩0.151.1试举出振动设计、系统识别和环境预测的实例。1.2如果把双轴汽车的质量分别离散到前、后轴上去,在考虑悬架质量和非悬架质量两个离散质量的情况下,画出前轴或后轴垂直振动的振动模型简图,并指出在这种化简情况下,汽车振动有几个自由度?2
1.7一加速度计指示出结构振动频率为82Hz,并具有最大加速度50g,求振动的振幅。2解:由ẋ̇=A×ω可知:maxn2ẋ̇ẋ̇509.8/×ms9.8maxmaxA====m22222ω(2πf)(2π×25)1/s50πn1.8证明:两个同频率但不同相角的简谐运动的合成仍是同频率的简谐运动,即:Acosωt+Bcos(ωt−ϕ)=Ccos(ωt−θ),并讨论ϕ=0,π/2,π三种特例。证明:Acosωt+Bcos(ωt−ϕ)=Acosωt+Bcosωtcosϕ+Bsinωtsinϕ=(AB+cos)cosϕωt+Bsinsinϕωt22=(AB+cos)ϕ+(sin)cos(Bϕωt−θ)22=A+2ABcosϕ+Bcos(ωt−θ)=Ccos(ωt−θ)⎧Bsinϕθ=arctg()⎪其中:⎨AB+cosϕ⎪22⎩C=A+2ABcosϕ+B1)当ϕ=0时:θ=0;C=AB+;2)当ϕ=π时:θ=arctgBAC(/);=A2+B2;23)当ϕ=π时:θ=0;C=AB−;1.9把复数4+5i表示为指数形式。iθ225解:4+5i=Ae,其中:A=4+5,θ=arctg()41.10证明:一个复向量用i相乘,等于把它旋转π/2。ππiiθ+iθiθ22证明:Ae×=iAe×e=Ae3
1.11证明:梯度算子∇是线性微分算子,即∇[af(x,y,z)+bg(x,y,z)]=a∇f(x,y,z)+b∇g(x,y,z)这里,a,b是与x、y、z无关的常数。1.12求函数g(t)=Acospωt+Bcosqωt的均方值。考虑p与q之间的如下三种关系:①q=np,这里n为正整数;②q/p为有理数;③q/p为无理数。1.13汽车悬架减振器机械式常规性能试验台,其结构形式之一如图T—1.13所示。其激振器为曲柄滑块机构,在导轨下面垂向连接被试减振器。试分析减振器试验力学的基本规律(位移、速度、加速度、阻尼力)。图T—1.131.14汽车悬架减振器机械式常规性能试验台的另一种结构形式如图T—1.14所示。其激振器采用曲柄滑块连杆机构,曲柄被驱动后,通过连杆垂向带动与滑块连接的被试减振器。试分析在这种试验台上的减振器试验力学的基本规律,并与前题比较。图T—1.144
2.1弹簧下悬挂一物体,弹簧静伸长为δ。设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。解:设物体质量为m,弹簧刚度为k,则:mg=kδ,即:ω=km/=g/δn取系统静平衡位置为原点x=0,系统运动方程为:⎧mẋ̇+kx=0⎪⎨x=2δ(参考教材P14)0⎪ẋ=0⎩0解得:xt()=2cosδωtn2.2弹簧不受力时长度为65cm,下端挂上1kg物体后弹簧长85cm。设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。解:由题可知:弹簧的静伸长△=0.850.650.2()−=mg9.8所以:ω===7(rads/)n△0.2取系统的平衡位置为原点,得到:2系统的运动微分方程为:ẋ̇+ωx=0n⎧x(0)=−0.2其中,初始条件:⎨(参考教材P14)⎩ẋ(0)=0所以系统的响应为:xt()=−0.2cosωtm()nmg弹簧力为:F=kxt()=xt()=−cosωtN()kn△2π因此:振幅为0.2m、周期为()s、弹簧力最大值为1N。75
2.3重物m悬挂在刚度为k的弹簧上并处于静平衡位置,另一重物m从高度为12h处自由落到m上而无弹跳,如图所示,求其后的运动。1解:取系统的上下运动x为坐标,向上为正,静平衡位置为原点x=0,则当m有x位移时,系统有:12E=(m+mx)̇T12212U=kx2由dE(+U)=0可知:(m+mx)̇̇+kx=0T12即:ω=k/(m+m)n12mg⎧x=2⎪0k系统的初始条件为:⎨ṁ2x=−2gh⎪0⎩m+m1212(能量守恒得:mgh=(m+mx)̇)21202因此系统的响应为:xt()=Acosωt+Asinωt0n1nmg⎧A=x=200⎪k其中:⎨ẋmg2ghk02⎪A==−1⎩ωkm+mn12mg2ghk即:=2ω−ωxt()(costsint)nnkm+m122.4一质量为m、转动惯量为I的圆柱体作自由纯滚动,圆心受到一弹簧k约束,如图所示,求系统的固有频率。解:取圆柱体的转角θ为坐标,逆时针为正,静平衡位置时θ=0,则当m有θ转角时,系统有:1212122E=Iθ̇+m(θ̇r)=(I+mr)θ̇T22212U=kr(θ)222由dE(+U)=0可知:(I+mr)θ̇̇+krθ=0T22即:ω=kr/(I+mr)(rad/s)n6
2.5均质杆长L、重G,用两根长h的铅垂线挂成水平位置,如图所示,试求此杆相对铅垂轴OO微幅振动的周期。2.6求如图所示系统的周期,三个弹簧都成铅垂,且k=2,kk=k。2131解:取m的上下运动x为坐标,向上为正,静平衡位置为原点x=0,则当m有x位移时,系统有:12E=mẋT2121252kk12U=kx+kx=kx(其中:k=)11226k+k125由dE(+U)=0可知:mẋ̇+kx=0T135k3m1即:ω=(rad/s),T=2π(s)n3m5k17
2.7如图所示,半径为r的均质圆柱可在半径为R的圆轨面内无滑动地、以圆轨面最低位置O为平衡位置左右微摆,试导出柱体的摆动方程,求其固有频率。解:设物体重量W,摆角坐标θ如图所示,逆时针为正,当系统有θ摆角时,则:2θU=WR(−r)(1−cos)θ≈WR(−r)2设ϕ̇为圆柱体转角速度,质心的瞬时速度:(Rr−)υ=(Rr−)θ̇=rϕ̇,即:ϕ̇=θ̇cr记圆柱体绕瞬时接触点A的转动惯量为I,则:AW21W2W2I=I+r=r+rACg2gg1213W2R−r23W22E=Iϕ̇=(r)(θ̇)=(R−r)θ̇TA222gr4g121W22(或者理解为:E=Iϕ̇+(R−r)θ̇,转动和平动的动能)Tc22g3W2由dE(T+U)=0可知:(R−r)θ̇̇+WR(−r)θ=02g2g即:ω=(rad/s)n3(R−r)2.8横截面面积为A,质量为m的圆柱形浮子静止在比重为γ的液体中。设从平衡位置压低距离x(见图),然后无初速度地释放,若不计阻尼,求浮子其后的运动。解:建立如图所示坐标系,系统平衡时x=0,由牛顿第二定律得:γAgmẋ̇+γ(Axg)=0,即:ω=nmx=x0有初始条件为:{ẋ=00γAgπ所以浮子的响应为:xt()=xsin(t+)m28
2.9求如图所示系统微幅扭振的周期。图中两个摩擦轮可分别绕水平轴O1,O2转动,它们相互啮合,不能相对滑动,在图示位置(半径O1A与O2B在同一水平线上),弹簧不受力。摩擦轮可以看做等厚均质圆盘,质量分别为m1,m2。解:两轮的质量分别为mm,,因此轮的半径比为:12rm11=rm22由于两轮无相对滑动,因此其转角比为:θrθ̇121==θrθ̇212取系统静平衡时θ=0,则有:111221122122E=(mr)θ̇+(mr)θ̇=(m+mr)θ̇T111222121122224121212U=kr(θ)+kr(θ)=(k+k)(rθ)11122212112221222由dE(+U)=0可知:(m+mr)θ̇̇+(k+kr)θ=0T1211121122(k+k)m+m1212即:ω=(rad/s),T=2π(s)nm+m2(k+k)12122.10如图所示,轮子可绕水平轴转动,对转轴的转动惯量为I,轮缘绕有软绳,下端挂有重量为P的物体,绳与轮缘之间无滑动。在图示位置,由水平弹簧维持平衡。半径R与a均已知,求微振动的周期。解:取轮的转角θ为坐标,顺时针为正,系统平衡时θ=0,则当轮子有θ转角时,系统有:121P21P22E=Iθ̇+(θ̇R)=(I+R)θ̇T22g2g12U=ka(θ)2P222由dE(+U)=0可知:(I+R)θ̇̇+kaθ=0TgP2I+R2ka2πg即:ω=(rad/s),故T==2π(s)nP22ωkaI+Rng9
2.11弹簧悬挂一质量为m的物体,自由振动的周期为T,如果在m上附加一个质量m1,则弹簧的静伸长增加△l,求当地的重力加速度。解:m∵T=2πk24πm∴=kT∵mg=kl△12kl△4πml△∴=g=mTm112.12用能量法求图所示三个摆的微振动的固有频率。摆锤重P,(b)与(c)中每个弹簧的弹性系数为k/2。(1)杆重不计;(2)若杆质量均匀,计入杆重。解:取系统的摆角θ为坐标,静平衡时θ=0(a)若不计杆重,系统作微振动,则有:1P22E=(L)θ̇T2g12U=PgL(1−cos)θ≈PgLθ2P2由dE(+U)=0可知:Lθ̇̇+PLθ=0Tgg即:ω=(rad/s)nL如果考虑杆重,系统作微振动,则有:1P2211221PmL22E=(L)θ̇+(mL)θ̇=(+)Lθ̇TL2g232g32LPmθLU=PgL(1−cos)θ+mg(1−cos)θ≈(+)gLL2g22由dE(+U)=0可知:P+mL2θ̇̇+P+mLθ=T()L()gL0g3g210
PmL(+)gg2即:ω=(rad/s)nPmL(+)Lg3(b)如果考虑杆重,系统作微振动,则有:1P2211221PmL22E=(L)θ̇+(mL)θ̇=(+)Lθ̇TL2g232g32PmLθ1kL2U≈(+)gL+()(θ)×2g22222PmkLL(+)g+g24即:ω=(rad/s)nPmL(+)Lg3(c)如果考虑杆重,系统作微振动,则有:1P2211221PmL22E=(L)θ̇+(mL)θ̇=(+)Lθ̇TL2g232g32PmLθ1kL2U≈−(+)gL+()(θ)×2g22222kLPmL−(+)g4g2即:ω=(rad/s)nPmL(+)Lg32.13求如图所示系统的等效刚度,并把它写成与x的关系式。22a+b答案:系统的运动微分方程mẋ̇+kx=02a11
2.14一台电机重470N,转速为1430r/min,固定在两根5号槽钢组成的简支梁的中点,如图所示。每根槽钢长1.2m,重65.28N,弯曲刚度EI=1.66×105N·m2。(a)不考虑槽钢质量,求系统的固有频率;(b)设槽钢质量均布,考虑分布质量的影响,求系统的固有频率;(c)计算说明如何避开电机和系统的共振区。2.15一质量m固定于长L,弯曲刚度为EI,密度为r的弹性梁的一端,如图所示,试以有效质量的概念计算其固有频率。wL3/(3EI)2.16求等截面U形管内液体振动的周期,阻力不计,假定液柱总长度为L。解:假设U形管内液柱长l,截面积为A,密度为ρ,取系统静平衡时势能为0,左边液面下降x时,有:12E=ρAlẋT2U=ρAx××g×x由dE(+U)=0可知:ρAlẋ̇+2gAxρ=0T2g2l即:ω=(rad/s),T=π(s)nlg12
2.17水箱l与2的水平截面面积分别为A1、A2,底部用截面为A0的细管连接。求液面上下振动的固有频率。解:设液体密度为ρ,取系统静平衡时势能为0,当左边液面下降x时,右边液1面上升x,液体在水箱l与2和细管中的速度分别为xxẋ̇̇,,,则有:2123121212E=[ρAh(−xx)]̇+[ρALx]̇+[ρAh(+xx)]̇T11133222222ρA12A122≈[Ah+AL()+Ah()]ẋ13212AA32(由于:h−x≈h;h+x≈h;Aẋ=Aẋ=Aẋ;Ax=Ax)121122331122x+x12U=ρAxg12AAA111由dE(+U)=0可知:[(1h+)+L()]ẋ̇+g(1+)x=0T11AAA232A1g(1+)A2即:ω=(rad/s)nAA11h(1+)+L()AA232.18如图所示,一个重W、面积为A的薄板悬挂在弹簧上,使之在粘性液体中振动。设T1、T2分别为无阻尼的振动周期和在粘性液体中的阻尼周期。试证明:2πW22µ=T−T22gATT12并指出µ的意义(式中液体阻尼力Fd=m•2Av)。13
1x02.19试证明:对数衰减率也可用下式表示δ=ln,(式中xn是经过n个循nxn环后的振幅)。并给出在阻尼比ζ为0.0l、0.1、0.3时振幅减小到50%以下所需要的循环数。解:设系统阻尼自由振动的响应为xt();t时刻的位移为x;t=t+nT时刻的位移为x;则:00n0n−ζωtxXen0cos(ωt−ϕ)0=d0=eζωnnTd−ζω(t+nT)xXen0dcos[ω(t+nT)−ϕ]nd0dxx1x000所以有:ln=ζωnT=nδ=nln,即:δ=lnndxxnxn1n211−ζ当振幅衰减到50%时,x=0.5x,即:n=ln2=ln2n0δ2πζ1)当ζ=0.01时,n=11;要11个循环;2)当ζ=0.1时,n=1.1;要2个循环;3)当ζ=0.3时,n=0.34;要1个循环;2.20某双轴汽车的前悬架质量为m1=1151kg,前悬架刚度为k1=1.02×105N/m,若假定前、后悬架的振动是独立的,试计算前悬架垂直振动的偏频。如果要求前悬架的阻尼比ζ=0.25,那么应给前悬架设计多大阻尼系数(c)的悬架减振器?14
2.21重量为P的物体,挂在弹簧的下端,产生静伸长δ,在上下运动时所遇到的阻力与速度v成正比。要保证物体不发生振动,求阻尼系数c的最低值。若物体在静平衡位置以初速度v0开始运动,求此后的运动规律。解:设系统上下运动为x坐标系,系统的静平衡位置为原点,得到系统的运动微分方程为:PPẋ̇+cẋ+x=0gδcc系统的阻尼比:ζ==2mkPP2gδ系统不振动条件为:ζ≥1,即:c≥2/Pgδ⎧x=00物体在平衡位置以初速度υ0开始运动,即初始条件为:⎨ẋ=υ⎩00此时系统的响应为:(可参考教材P22)−ζωtωtζ2−1−ωtζ2−11)当ζ>1时:xt()=en(Aen+Aen)12⎧1υ0A=±⎪⎪1,22ωζ2−1其中:⎨ng⎪ω=n⎪⎩δ⎧A=02)当ζ=1时:xt()=Ae−ωnt+Ate−ωnt,其中:112⎨A=υ⎩20即:xt()=υte−ωnt03)当ζ<1时:xt()=e−ζωnt(Ccosωt+Csinωt)1d2d⎧C=0⎪1υ其中:υω,即:xt()=e−ζωnt0sinωt⎨C2=0/ddω⎪2dω=ω1−ζ⎩dn2.22一个重5500N的炮管具有刚度为3.03×105N/m的驻退弹簧。如果发射时炮管后座1.2m,试求:①炮管初始后座速度;②减振器临界阻尼系数(它是在反冲结束时参加工作的);③炮管返回到离初始位置0.05m时所需要的时间。2.23设系统阻尼比ζ=0.1,试按比例画出在ω=0.5、1.0、2.0三种情况下ωn微分方程的向量关系图。15
2.24试指出在简谐激励下系统复频率响应、放大因子和品质因子之间的关系,并计算当ζ=0.2、ω=5rad/s时系统的品质因子和带宽。n2.25已知单自由度系统振动时其阻力为cv(其中c是常数,v是运动速度),激励为F=F0sinωt,当ω=ωn即共振时,测得振动的振幅为X,求激励的幅值F0。若测得共振时加速度的幅值为A,求此时的F0。2.26某单自由度系统在液体中振动,它所受到的激励为F=50cosωt(N),系统在周期T=0.20s时共振,振幅为0.005cm,求阻尼系数。2π解:由T=0.20s时共振可知,系统固有频率为:ω==10πnTF当ω→ω时,已知响应振幅:0,(参教材P30)X=ncω5F100所以:c==(Nsmi/)Xωπ2.27一个具有结构阻尼的单自由度系统,在一周振动内耗散的能量为它的最大势能的1.2%,试计算其结构阻尼系数γ。2.28要使每一循环消耗的能量与频率比无关,需要多大的阻尼系数。2.29若振动物体受到的阻力与其运动速度平方成正比,即2⎧F=aẋẋ≤0d⎨2⎩Fd=−aẋẋ>0求其等效阻尼系数和共振时的振幅。解:实际上,这是一种低粘度流体阻尼。设系统的运动为:xt()=Xcos(ωt−ϕ)2ω=αxdẋc∫π/w2=∫αxdAHẇ(|()|wwt)(−ϕ)0π/w2=∫α[|aHw()|(wwt−ϕ)][|−Hw()|wAsin(wt−ϕ)]dx0π/waX3333=−3wAsin(ωt−ϕ)dt∫0Aπ/w333=∫−awXsin(ωt−ϕ)dt03223=−αXw[2(0)ϕ−(0)ϕ]316
ω=axωd38ax3ω2=CπωX238a3xω2C=e3π2.29x=Xcos(ωt−ϕ)•x=−ωXsin(ωt−ϕ)••πω/2/πω22W=αxdx+−αxdxc∫0∫πω/πω/2222=∫αωXsin(ωt−ϕ)(−ωXcos(ωt−ϕ))dt02/πω2222+∫−αωXsin(ωt−ϕ)(−ωXcos(ωt−ϕ))dtπω/832=αXω32W=W=CπωXPCω=4ax3ω2d38aXωC=3π832F03πF0X==cω8aXω2X=3πF0=13πF08axw22w22ann2.29•2•⎧αxx≤0Fd=⎨•2•⎩−αxx≥0•T/42ω=Fdx=4αxdxe∫d∫0•T/43=4∫αxdx0T/4333=4∫Zωcos(ωt−ϕ)dt0832=αZω32ω=ω=CπωZPCω=8αZωe3πZ=F0Z=3πF0C0ω8αZω217
2.30KGlⅡ电动机重P,装在弹性基础上,静下沉量为d。当转速为nr/min时,由于转子失衡,沿竖向有正弦激励,电机产生振幅为A的强迫振动。试求激励的幅值,不计阻尼。2.31电动机重P,装在弹性梁上,使梁有静挠度d。转子重Q,偏心距为e。试求当转速为w时,电动机上下强迫振动的振幅A,不计梁重。2.32一飞机升降舵的调整片铰接于升降舵的O轴上(图T—2.32),并由一联动装置控制。该装置相当于一刚度为kT的扭转弹簧。调整片转动惯量为I,因而系统固有频率ω=K/I,nT但因kT不能精确计算,必须用试验测定ω。为此固定升降舵,利用弹n簧k2对调整片做简谐激励,并用弹簧k1来抑制。改变激励频率ω直至图T—2.32达到其共振频率ω。试以ω和试TT验装置的参数来表示调整片的固有频率ω。n解:设调整片的转角为θ,系统的微分方程为:2Iθ̇̇+[k+(k+kL)]θ=kLysinωtT12222kT+(k1+kL2)系统的共振频率为:ω=0I22因此:k=Iω−(k+kL)T0122调整片的固有频率为:2kT2(k1+kL2)ω==ω−n0II18
2.33如图所示由悬架支承的车辆沿高低不平的道路行进。试求W的振幅与行进速度的关系,并确定最不利的行进速度。解:由题目2.33T=Lw=2π=2πVVTLy=Ycos2πVtL••wX=−K(x−y)••wX=KYcos2πVtL••wX+Kx=KYcos2πVtL2πVwS2X(s)+KX(s)=KYL(2πV)2+s2LKY2πVX(s)=Lω2=K(s2+(2πV)2)(ws2+K)nwL2ω2Y2aYX=nsina+sinωtω2+a2ω2−a2nnnYYYKL2YX====22222222[1−(a/ω2)]+01−(a/ωn)1−4πVwKL−TπVwn2KLLV=k/w2π2.33ω=2πTω=2πvLTv=L••mX+KX=Ky••22X+ωX=ωynnYω2X=n22ωn−ωYω2Yω2X=n=n2222ωn−ωω2−4πvn2L2RL2V=4π2m19
2.34单摆悬点沿水平方向做简谐运动(图T—2.34),x=asinwt。试求在微幅的强迫振动中偏角q的变化规律。已知摆长为L,摆锤质量为m。2.35一个重90N的飞机无线电要与发动机的频率1600~2200r/min范围的振动隔离,为了隔离85%,隔振器的静变形需要多少?2.36试从式(2.95)证明:1.无论阻尼比ζ取何值,在频率比ω/ωn=2时,恒有X=A。2.在ω/ω<2,X/A随ζ增大而减小,而在ω/ω>2,X/A随ζnn增大而增大。2.37某位移传感器固有频率为4.75Hz,阻尼比z=0.65。试估计所能测量的最低频率,设要求误差≤1%,≤2%。2.38一位移传感器的固有频为率2Hz,无阻尼,用以测量频率为8Hz的简谐振动,测得振幅为0.132cm。问实际振幅是多少?误差为多少?2.39一振动记录仪的固有频率为fn=3.0Hz,阻尼比z=0.50。用其测量某物体的振动,物体的运动方程已知为x=2.05sin4pt+1.0sin8pt(cm)证明:振动记录仪的振动z将为z=1.03sin(4pt-500)+1.15sin(8pt-1200)(cm)20
2.40求单自由度无阻尼系统对图所示激励的响应,设初始条件为零。解:ah(t)=1e−ξωntsinωtmωdd1−ξω(t−τ)h(t−τ)=ensin[ω(t−τ)]mωddh(t)=1sinωtmωddh(t−2)=1sin[ω(t−τ)]mωddtF1X(t)=dcosω(t−τ)=(cosωt)∫nRn0t=F1sinω(t−τ)d(t−τ)1∫0mωnnttFFX(t)=F(t)h(t−τ)dτ+−F(t)h(t−τ)dτ=1[cosω(t−t)]−2[1−cosω(t−t)]∫1∫2Rn1Rn10t1ttt1X(t)=F(t)h(t−τ)dτ+−F(t)h(t−τ)dτ+0*h(τ−t)∫1∫2∫20t1t2FF=1[cosω(t−t)−cosωt]−2[cosω(t−t)−cosω(t−t)]Rn1nRn2n1bFFF(τ)=0tF(t−τ)=0(t−τ)tt11ttFX(t)=F(t)h(t−τ)=−1[0(t−τ)dcosωt∫0ωn∫0t1nFsinωt=0[t−n]Rtωt1n1t1tFsinω(t−t)−sinωtX(t)=F(τ)h(t−τ)dτ+0*h(t−τ)dτ=1[cosω(t−t)]−n1n]∫01∫tRn1ωnt1CF(τ)=F0tF(t−τ)=F0(t−τ)tt11tX(t)=F(t)h(t−τ)dτ=F1[1−cosω(t−t)+1sinωt]∫0Rnt1ωnt1ntt1F1sinωn(t−t1)−sinωntX(t)=F(τ)h(t−τ)dτ+0*h(t−τ)dτ=[−cosωt−]∫01∫tRnωnt121
2.41求图T—2.41所示系统的传递函数,这里激励是x3(t)。2.42一弹簧质量系统从一倾斜角为300的光滑斜面下滑,如图所示。求弹簧与墙壁开始接触到脱离接触的时间。解:弹簧接触墙壁时,m的速度为:υ=2gssin30°=gs0以接触时m的位置为原点,斜下方为正,则m的微分方程为:mẋ̇+kx=mgsin30°⎧x=00考虑到系统的初始条件:⎨ẋ=gs,采用卷积分计算系统的响应为:⎩0ẋmgsin30°k0其中:xt()=sinωt+(1−cosωt)ω=nnnωkmn当m与墙壁脱离时应有xt()=01gsmg故由:xt()=sinωt+(1−cosωt)=01n1n1ω2knk4sk可得到:t=2arctg(−)1mmg也就是弹簧与墙壁开始接触到脱离接触的时间。22
2.43一个高F0、宽t0的矩形脉冲力加到单自由度无阻尼系统上,把这个矩形脉冲力看做两个阶跃脉冲力之和,如图所示。用叠加原理求t>t0后的响应。2.44如图T—2.44所示,系统支承受凸轮作用,运动波形为图中所示的锯齿波,求系统的稳态响应。2.45证明式(2.136),即卷积积分满足交换律h(t)∗F(t)=F(t)∗h(t)3.1如图所示扭转系统。设I=2;Ik=k12t1t21.写出系统的刚度矩阵和质量矩阵;2.写出系统的频率方程并求出固有频率和振型,画出振型图。解:1)以静平衡位置为原点,设II,的转角θθ,为广义坐标,画出II,隔离体,121212根据牛顿第二定律得到运动微分方程:⎧⎪Iθ̇̇+kθ+k(θ−θ)=0⎧⎪Iθ̇̇+(k+k)θ−kθ=011t11t21211t1t21t22⎨,即:⎨⎪⎩Iθ̇̇+k(θ−θ)=0⎪⎩Iθ̇̇−kθ+kθ=022t22122t21t22⎡I0⎤⎡k+k−k⎤1t1t2t2所以:[M]=⎢⎥,[K]=⎢⎥⎣0I⎦⎣−kk⎦2t2t2⎧⎫⎪⎪θ̇̇⎧⎫θ11系统运动微分方程可写为:[M]⎨⎬+[K]⎨⎬=0…………(a)θ̇̇θ⎪⎪⎩⎭2⎩⎭2或者采用能量法:系统的动能和势能分别为1212E=Iθ̇+Iθ̇T11222223
12121212U=kθ+k(θ−θ)=(k+k)θ+kθ−kθθt11t212t1t21t22t1122222求偏导也可以得到[M],[K]⎡20⎤⎡2−1⎤由于I=2;Ik=k,所以[M]=I⎢⎥,[K]=k⎢⎥12t1t22t1⎣01⎦⎣−11⎦⎧⎫θ1⎧⎫u12)设系统固有振动的解为:⎨⎬=⎨⎬cosωt,代入(a)可得:⎩⎭θ2⎩⎭u22⎧⎫u1([K]−ω[M])⎨⎬=0…………(b)u⎩⎭222k−2ωI−k2t12t1得到频率方程:△(ω)==02−kk−ωIt1t1222422即:△(ω)=2Iω−4kIω+k=02t12t12224kI±(4kI)−×42I×k(2±2)k2t12t122t1t1解得:ω==1,224I2I22(2−2)k(2+2)k所以:t1
您可能关注的文档
- 《机械制图》习题集整理(答案和题目已分开).doc
- 《机械制图习题集》(第四版)N2(一)答案.pdf
- 《机械制造工艺学》试题库及答案.doc
- 《机械制造技术基础》习题与解答.doc
- 《机械制造技术基础》复习题(含答案).doc
- 《机械原理》分类练习题(含答案) (复习备用).doc
- 《机械原理》第七版西北工业大学习题答案(特别全答案详解).pdf
- 《机械工程控制基础》课后答案.doc
- 《机械工程控制基础》课后题答案.doc
- 《机械设计》期末考试试题库含答案详解8套.doc
- 《机械设计基础》典型试题及答案(10套).doc
- 《机械设计基础》杨可桢 习题答案1-18章.docx
- 《机械设计基础》杨晓兰版(机械工业出版社)课后习题答案.doc
- 《机械设计基础》试题库及答案.doc
- 《机械设计基础》试题库及答案.pdf
- 《机械设计基础》试题库及答案_(1).doc
- 《机电传动控制》课后答案.doc
- 《机电工程管理与实务》历年真题及答案解析.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看