

- 5.48 MB
- 2022-04-22 11:34:37 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'《机械原理》分类练习题一.填空题(70题)第2章机构结构分析1.构件和零件不同,构件是(运动的单元),而零件是(制造的单元)。2.两构件直接接触并能产生一定相对运动的联接称为(运动副),按照其接触特性,又可将它分为(低副)和(高副)。3.两构件通过面接触组成的运动副称为(低副),在平面机构中又可将其分为(转动副)和(移动副)。两构件通过点或直线接触组成的运动副称为(高副)。4.在平面机构中,若引入一个高副,将引入(一)个约束,而引入一个低副将引入(两)个约束。5.在运动链中,如果将其中某一构件加以固定而成为机架,则该运动链便成为(机构)。6.在机构中与其他约束重复而不起限制运动的约束称为(虚约束)。7.平面机构具有确定运动的条件是(自由度)等于(原动件个数),且(自由度>0)。8.平面机构结构分析中,基本杆组的结构公式是(3n=2PL)。第3章平面机构的运动分析9.机构中的速度瞬心是两构件上(相对速度)为零的重合点,它用于平面机构(速度)分析。10.当两构件组成移动副时,其瞬心在(移动副导路的垂线的无穷远处)。11.当两机构组成转动副时,其瞬心与(转动副中心)重合。12.平面机构运动分析中,“三心定理”是指(作相对运动的三个构件的三个瞬心必定在一条直线上)。第8章平面连杆机构及其设计13.铰链四杆机构中的固定件称为(机架),与其用(转动)《机械原理》第79页共79页
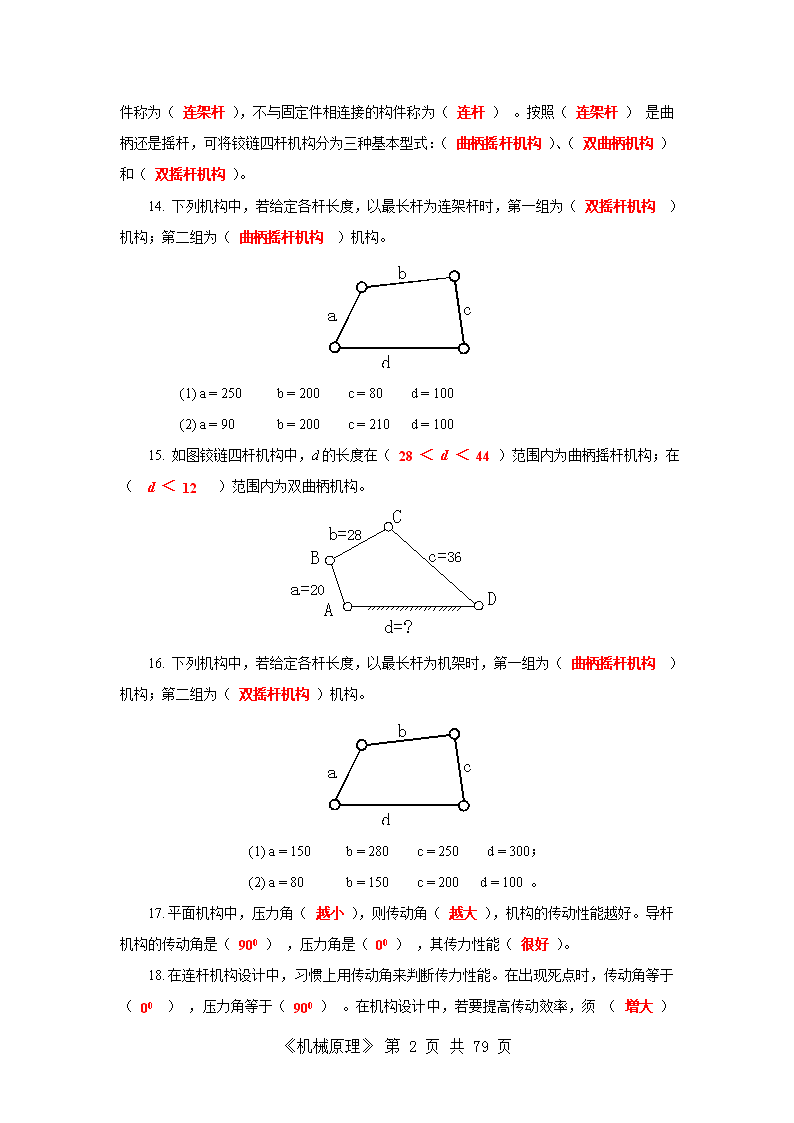
副直接相连接的构件称为(连架杆),不与固定件相连接的构件称为(连杆)。按照(连架杆)是曲柄还是摇杆,可将铰链四杆机构分为三种基本型式:(曲柄摇杆机构)、(双曲柄机构)和(双摇杆机构)。1.下列机构中,若给定各杆长度,以最长杆为连架杆时,第一组为(双摇杆机构)机构;第二组为(曲柄摇杆机构)机构。(1)a=250b=200c=80d=100(2)a=90b=200c=210d=1002.如图铰链四杆机构中,d的长度在(28<d<44)范围内为曲柄摇杆机构;在(d<12)范围内为双曲柄机构。3.下列机构中,若给定各杆长度,以最长杆为机架时,第一组为(曲柄摇杆机构)机构;第二组为(双摇杆机构)机构。(1)a=150b=280c=250d=300;(2)a=80b=150c=200d=100。4.平面机构中,压力角(越小),则传动角(越大),机构的传动性能越好。导杆机构的传动角是(900),压力角是(00),其传力性能(很好)。5.在连杆机构设计中,习惯上用传动角来判断传力性能。在出现死点时,传动角等于(00),压力角等于(900)。在机构设计中,若要提高传动效率,须(增大)《机械原理》第79页共79页
传动角。1.曲柄摇杆机构出现最小传动角的位置是(曲柄与机架两次共线位置)。2.在曲柄摇杆机构中(曲柄)与(机架)两次共线位置时可能出现最小传动角。3.连杆机构的急回特性用(行程速比系数K)表达。4.在平面四杆机构中,极位夹角越大,则行程速比系数就(越大),急回性能也(越明显);若极位夹角为零,则其行程速比系数等于(1),就意味着该机构(没有)急回性能。5.指出两种一定存在有急回特性的机构:(摆动导杆机构)、(偏置滑块机构)。6.曲柄摇杆机构中,当(摇杆)为主动件时,在(曲柄)和(连杆)共线时,会出现死点现象。7.对心曲柄滑块机构的极位夹角为(零),所以(没有)急回特征。第9章凸轮机构及其设计8.凸轮机构按凸轮形状可分为(盘形凸轮机构)、(移动凸轮机构)和(圆柱凸轮机构)。按从动件的型式可分为(滚子从动件)、(尖顶从动件)和(平底从动件)三种。9.凸轮机构中,从动件采用等加速等减速运动规律时,将引起(柔性)冲击,采用等速运动规律时,会引起(刚性)冲击。10.当要求凸轮机构从动件的运动没有冲击时,应选用(摆线运动)规律。11.凸轮的形状是由(从动件运动规律和基圆半径)决定的。12.在图解法设计滚子从动件凸轮中,把滚子中心的轨迹称为凸轮(理论轮廓);为使凸轮型线在任何位置既不变尖,更不相交,就要求滚子半径必须小于(理论轮廓外凸部分)的最小曲率半径。13.选择凸轮基圆半径时,要保证其压力角的要求,其它条件不变的情况下,结构越紧凑,基圆的半径越小,压力角就(越大),机械效率(越低)。凸轮机构的压力角随基圆半径的减小而(增大),为减小推力和避免自锁,压力角应(越小越好)。14.直动从动件盘形凸轮机构的基圆半径减小(其它条件不变)时,压力角会(增大)。最终会导致(机构自锁)。为使机构有良好的受力状况,压力角应越(小)越好。15.凸轮的基圆半径越小,则机构尺寸(越小),《机械原理》第79页共79页
但过小的基圆半径会导致压力角(增大),使凸轮机构发生(自锁)。第10章齿轮机构及其设计1.渐开线齿廓上各点的压力角是变化的,国家标准规定(分度圆)上齿廓的压力角为标准值且等于(200),而齿顶圆上的压力角(大于)分度圆上的压力角(大于200),齿条的齿顶线上的压力角(等于)分度线上的压力角。2.标准渐开线直齿轮齿顶圆上的齿距(大于)分度圆上的齿距。3.在渐开线齿轮啮合过程中,其齿廓间的压力方向(不变);4.一对渐开线齿轮制成后,若安装时两轮的中心距稍有偏差,与标准中心距相比,其传动比(不变),啮合角(变大)。5.一对外啮合的标准直齿圆柱齿轮,它们基圆的内公切线,既是(啮合线),又是(接触齿廓的公法线)。6.渐开线齿廓的形状取决于基圆的大小,基圆半径越大,则齿廓的曲率半径(越大),基圆半径无穷大时,齿廓曲线为(直线),称之为(齿条)。7.与直齿圆柱齿轮相比较,斜齿圆柱齿轮的重合度(大),发生根切的最小齿数(少)。8.对斜齿圆柱齿轮,其当量齿数(大于)实际齿数,端面分度圆上的压力角(大于)200。9.斜齿轮分端面和法向,在分析轮齿强度问题时,应从(法向)来分析;在计算几何尺寸时,须按(端面)参数进行。锥齿轮的标准模数选在(大端)。10.一对渐开线标准直齿圆柱齿轮非标准安装时,节圆和分度圆(不重合(或不相等))。分度圆的大小取决于(模数与齿数),节圆的大小取决于(实际中心距或啮合角)。11.所谓标准齿轮是指(h*a)、(c*)为标准参数,(s和e)相等。12.标准直齿轮的基本参数是(z、m、α、h*a、c*)。13.一对直齿圆柱齿轮正确啮合的条件为(m1=m2=m)和(α1=α2=α),连续传动的条件为(重合度≥1)。14.标准斜齿轮正确啮合的条件为(法向模数相等)、(法向压力角相等)和(螺旋角大小相等,方向相反)(mn1=mn2=m、αn1=αn2=α和β1=-β2);《机械原理》第79页共79页
1.一对锥齿轮的正确啮合条件是(R1=R2),(m1大=m2大=m)和(α1=α2=α)。2.齿轮的加工方法按其切齿原理可分为(仿形法)和(范成法)两种。3.渐开线齿轮传动须满足三个条件为(正确啮合条件)、(连续传动条件)、(无侧隙啮合条件)。4.渐开线直齿圆柱齿轮的连续传动条件是(重合度大于或等于1)。5.斜齿轮的端面压力角(大于)法向压力角,其(法向)参数(法向)模数和压力角)作为标准值;其发生根切的最少齿数(小于)直齿轮。齿条的基圆半径为(+∞)。6.一个正常齿制标准渐开线斜齿轮发生根切现象时的最少齿数至少小于(17);斜齿轮与直齿轮相比,它有许多优点,但其最大的缺点是(产生轴向力)。7.渐开线斜齿圆柱齿轮的当量齿数公式为:(ZV=Z/COS3β),有何用途(加工成型齿轮时便于选取刀具)。8.渐开线斜齿圆柱齿轮的当量齿轮是指(模数和压力角作一虚拟的直齿轮,其与斜齿轮的法面齿形最接近,这个齿轮则称作斜齿轮的当量齿轮)。9.用齿条形刀具范成法加工渐开线齿轮时,为了使标准齿轮不发生根切,刀具的齿顶线应(低于极限啮合点N1),被加工齿轮的最少齿数为(17)。10.用齿条型刀具范成法切制渐开线标准齿轮时,刀具齿顶线超过极限啮合点会发生(根切)现象,对被加工齿轮的齿数应限制为(大于17齿)。11.用范成法加工渐开线齿轮时,为使标准齿轮不发生根切,应满足(刀具齿顶线与啮合(切削)线交点不超出被切齿轮的极限啮合点。(或齿轮齿数不小于不根切的最少齿数)。12.一标准渐开线圆柱齿轮的齿数为14,此时该齿轮已产生(根切)现象,为克服这一现象可采用(正变位)方法加工,刀具可采用(正移距),这样制得的齿轮称为(变位齿轮)。与正常标准齿轮相比较,它的分度圆齿厚(增大),发生根切的最少齿数(变小)。13.斜齿轮的标准参数在(法)面上,圆锥齿轮的标准参数在(大端)面。14.圆锥齿轮用于传递两轴线(相交)的运动,蜗杆传动用于传递两轴线(交错)的运动。15.直齿圆锥齿轮的传动比公式为()。《机械原理》第79页共79页
1.蜗杆的分度圆直径为(d=mq),蜗轮蜗杆传动时的中心距为(m(q+z1)/2)。第11章齿轮系及其设计2.周转轮系由(行星轮)、(行星架)、(中心轮)等基本构件组成。3.轮系中若含有圆锥齿轮、蜗轮蜗杆或齿轮齿条,则各轮转向只能用(画箭头)的方法表示。第12章其它常用机构4.棘轮机构是将(主动棘爪的往复摆动)运动转换成(棘轮的间歇转动)运动。5.槽轮机构是将(主动销的连续转动)转换为(槽轮的单向间歇)运动。6.常用的间歇运动机(棘轮机构、槽轮机构、凸轮机构、不完全齿轮机构等)。(填三种)7.间歇凸轮机构是将(主动轮的连续转动)转化为(从动转盘的间歇)的运动。8.单圆销外啮合六槽轮机构,曲柄转一周,则槽轮转()度。一.选择题(共116题)第2章机构结构分析1.组成机器的运动单元体是什么?( B ) A.机构 B.构件 C.部件 D.零件2.下列哪一点是构件概念的正确表述?( D ) A.构件是机器零件组合而成的B.构件是机器的装配单元 C.构件是机器的制造单元 D.构件是机器的运动单元3.机器与机构的本质区别是什么?(A)A.是否能完成有用的机械功或转换机械能B.是否由许多构件组合而成C.各构件间能否产生相对运动D.两者没有区别4.两构件组成运动副的必要条件是两构件( A )。 A.直接接触且具有相对运动 B.直接接触但无相对运动《机械原理》第79页共79页
C.虽然不接触但具有相对运动 D.既不接触也无相对运动1.平面六杆机构有共有(D )个速度瞬心。 A.6 B.9 C.12D.152.某平面机构共有5个低副、1个高副,机构的自由度为1,该机构具有(C)个活动构件。A. 0 B.3 C.4D.53.机构中只有一个(D)。A.闭式运动链B.原动件C.从动件D.机架4.某机构为Ⅲ级机构,则该机构应满足的必要充分条件是(D)。A.含有一个原动件组B.至少含有一个基本杆组C.至少含有一个Ⅱ级杆组D.至少含有一个Ⅲ级杆组5.若两构件组成低副,则其接触形式为( A )。A.面接触B.点或线接触C.点或面接触D.线或面接触6.机构具有确定运动的条件是(B)。A.机构的自由度大于零B.机构的自由度大于零且自由度数等于原动件数C.机构的自由度大于零且自由度数大于原动件数D.前面的答案都不对7.两个构件在多处接触构成移动副,各接触处两构件相对移动的方向(A)时,将引入虚约束。A.相同、相平行 B.不重叠C.相反 D.交叉8.两构件在多处相配合而构成转动副,在各配合处两构件相对转动的轴线(B)时,将引入虚约束。A.交叉 B.重合 C.相平行D.不重合 E.成直角 F.成锐角9.高副低代的方法是(A)。A.加上一个含有两低副的虚拟构件B.加上一个含有一个低副的构件C.减去一个构件和两个低副10.基本杆组的自由度应为(C)。A.-1B.+1C.011.计算机构自由度时,若计入虚约束,则机构的自由度就会(B)。《机械原理》第79页共79页
A.增多B.减少C.不变1.凸轮机构中的滚子自由度会使整个机构的自由度(A)。A.增加B.减少C.不变第3章平面机构的运动分析2.速度和加速度的影像原理只适用于(D)上。A.整个机构B.主动件C.相邻两个构件D.同一构件3.若两刚体都是运动的,则其速度瞬心称为(C)。A.牵连瞬心 B.绝对瞬心 C.相对瞬心4.速度瞬心是(A)为零的重合点。A.相对速度B.绝对速度C.加速度5.作平面运动的三个构件有彼此相关的三个瞬心,这三个瞬心(C)。A.是重合的B.不在同一条直线上C.在同一条直线上6.作图示凸轮机构的速度分析时,凸轮与推杆的速度瞬心位于(A)。A.A点B.B点C.C点D.D点7.从平衡条件可知,动平衡转子(A)静平衡的,静平衡转子(B)动平衡的。A.一定是B.不一定是 C.一定不是8.机器在安装飞轮后,原动机的功率可以比未安装飞轮时(C)。A.一样 B. 大 C.小第8章平面连杆机构及其设计9.四杆长度不等的双曲柄机构,若主动曲柄作连续匀速转动,则从动曲柄将作(A)。A.周期变速转动B.间歇转动C.匀速转动D.往复摆动10.杆长不等的铰链四杆机构,若以最短杆为机架,则是(D)。A.曲柄摇杆机构B.双曲柄机构C.双摇杆机构 D.双曲柄机构或双摇杆机构11.铰链四杆机构的死点位置发生在(A)。A.从动件与连杆共线位置B.从动件与机架共线位置《机械原理》第79页共79页
C.主动件与连杆共线位置D.主动件与机架共线位置1.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,且以最短杆为机架,则机构有(B)。A.一个曲柄B.两个曲柄C.无曲柄D.可能有一个也可能有两个2.图(a)为(B),图(b)为(D)。(a)(b)A.曲柄滑块机构B.导杆机构C.摇块机构D.定块机构3.铰链四杆机构的压力角是指在不计算摩擦情况下连杆作用于(B)上的力的方向与该力作用点处的速度方向之间所夹的锐角。A.主动件 B.从动件 C.机架 D.连架杆4.平面四杆机构中,是否存在死点,取决于(B)是否与连杆共线。A.主动件 B.从动件 C.机架 D.摇杆5.一个K大于1的铰链四杆机构与K=1的对心曲柄滑块机构串联组合,该串联组合而成的机构的行程变化系数K(A)。A.大于1 B.小于1 C.等于1 D.等于26.在设计铰链四杆机构时,应使最小传动角γmin(B)。A.尽可能小一些 B.尽可能大一些 C.为0° D.45°7.有一四杆机构,其行程速比系数K=1,该机构(A)急回作用。A.没有; B.有; C.不一定有8.曲柄滑块机构通过(B)可演化成偏心轮机构。A.改变构件相对尺寸 B.改变运动副尺寸C.改变构件形状9.在曲柄摇杆机构中,若曲柄为主动件且作等速转动时,其从动件摇杆作(C)。A.往复等速运动 B.往复变速运动C.往复变速摆动 D.往复等速摆动10.曲柄滑块机构有死点存在时,其主动件是(B)。A.曲柄 B.滑块 C.连杆 D.导杆11.曲柄摇杆机构,(B)为主动件是存在死点的条件。A.曲柄 B.摇杆 C.连杆12.四杆机构在死点时,传动角γ是:(B)。A.γ>0° B.等于0° C.0°<γ<90°D.大于90°《机械原理》第79页共79页
1.在“最短杆长度+最长杆长度≤其余两杆长度之和”条件下,以最短杆的相邻杆为机架,得(A)。A.曲柄摇杆机构B.双曲柄机构C.双摇杆机构2.在“最短杆长度+最长杆长度≤其余两杆长度之和”条件下,固定最短杆的对边,得(C)。A.曲柄摇杆机构B.双曲柄机构C.双摇杆机构3.压力角是在不考虑摩擦情况下,作用力与作用点的(B)方向的夹角。A.法线B.速度C.加速度D.切线4.要将一个曲柄摇杆机构转化成为双摇杆机构,可将(C)。A.原机构的曲柄作机架B.原机构的连杆作机架C.原机构的摇杆作机架5.为使机构具有急回运动,要求行程速比系数(B)。A.K=1B.K>1C.K<16.要将一个曲柄摇杆机构转化成双摇杆机构,可以将原机构的机架松开,而将原机构的(C)作为机架。A.曲柄;B.连杆C.摇杆7.要将一个曲柄摇杆机构转化成为双摇杆机构,可将(C)。A.原机构的曲柄作机架B.原机构的连杆作机架C.原机构的摇杆作机架8.图示的四个铰链机构中,图(A)是双曲柄机构。 A.B. C.D.9.当对心曲柄滑块机构的曲柄为原动件时,机构有无急回特性和死点?(C)A.有急回特性、有死点B.有急回特性、无死点C.无急回特性、无死点D.无急回特性、有死点第9章凸轮机构及其设计10.在下列凸轮机构中,从动件与凸轮的运动不在同一平面内的是( D )。A.直动滚子从动件盘形凸轮机构《机械原理》第79页共79页
B.摆动滚子从动件盘形凸轮机构C.直动平底从动件盘形凸轮机构D.摆动从动件圆柱凸轮机构1.右图所示凸轮机构的推程运动角是多少?(AB、CD为以O为圆心的圆弧)(C)A.160°B.130°C.120°D.110°2.凸轮机构从动件运动规律为等速运动规律时,机构受力(B)。A.无冲击B.有刚性冲击C.有柔性冲击D.不确定冲击图33.右图为凸轮机构在推程中从动件的位移线图,其从动件的运动规律为(C)。这种运动规律O、e两点(E)。A.等速运动B.等加速、等减速运动C.简谐运动D.引起刚性冲击E.引起柔性冲击F.能避免冲击4.与连杆机构相比,凸轮机构最大的缺点是(B)。A.惯性力难以平衡 B.点、线接触,易磨损 C.设计较为复杂 D.不能实现间歇运动5.与其他机构相比,凸轮机构最大的优点是(A)。A.可实现各种预期的运动规律 B.便于润滑C.制造方便,易获得较高的精度 D.从动件的行程可较大6.(C)盘形凸轮机构的压力角恒等于常数。A.摆动尖顶推杆 B.直动滚子推杆C.摆动平底推杆 D.摆动滚子推杆7.对于直动推杆盘形凸轮机构来讲,在其他条件相同的情况下,偏置直动推杆与对心直动推杆相比,两者在推程段最大压力角的关系为(D)。A.偏置比对心大 B.对心比偏置大C.一样大 D.不一定8.下述几种运动规律中,(B)既不会产生柔性冲击也不会产生刚性冲击,可用于高速场合。A.等速运动规律 B.摆线运动规律(正弦加速度运动规律)《机械原理》第79页共79页
C.等加速等减速运动规律 D.简谐运动规律(余弦加速度运动规律)1.对心直动尖顶推杆盘形凸轮机构的推程压力角超过许用值时,可采用(A)措施来解决。A.增大基圆半径 B.改用滚子推杆C.改变凸轮转向 D.改为偏置直动尖顶推杆2.凸轮从动件按等速运动规律运动上升时,冲击出现在(D)。A.升程开始点 B.升程结束点C.升程中点D.升程开始点和升程结束点3.图示为凸轮机构从动件升程加速度与时间变化线图,该运动规律是(C)运动规律。A.等速 B.等加速等减速C.正弦加速度 D.余弦加速度4.图示为凸轮机构从动件位移与时间变化线图,该运动规律是(A)运动规律。A.等速; B.等加速等减速; C.正弦加速度;D.余弦加速度; E.正弦加速度—正弦减速度5.在从动件运动规律不变的情况下,对于直动从动件盘形凸轮机构,若缩小凸轮的基圆半径,则压力角(B)。A.保持不变B.增大C.减小6.当凸轮基圆半径不变时,为了改善机构的受力情况,采用适当的偏置式从动件,可以(A)凸轮机构推程的压力角。A.减小B.增加C.保持原来7.直动从动件凸轮机构,推程许用压力角常取为(B),回程许用压力角常取(C)。A.0°; B.30°; C.70°~80°; D.90°8.图示为凸轮机构从动件升程加速度与时间变化线图,该运动规律是(D)《机械原理》第79页共79页
运动规律。A.等速 B.等加速等减速 C.正弦加速度D.余弦加速度1.图示为凸轮机构从动件整个升程加速度与时间变化线图,该运动规律是(B)运动规律。A.等速 B.等加速等减速C.正弦加速度D.余弦加速度2.在凸轮机构中,从动件在下列哪种运动规律下存在刚性冲击?(A)A.等速运动B.等加速等减速C.余弦加速度3.在凸轮机构中,从动件在下列哪种运动规律下存在柔性冲击?(BC)A.等速运动B.等加速等减速C.余弦加速度4.在移动滚子从动件盘形凸轮机构中,若凸轮实际廓线保持不变,而增大或减小滚子半径,从动件运动规律会(B)。A.改变B.不变5.对于转速很高的凸轮机构,为了减小冲击,其推杆的运动规律最好采用(C)。A.等速运动B.等加速等减速运动C.正弦加速度运动6.理论廓线相同而实际廓线不同的两个对心直动滚子从动件盘形凸轮,其推杆的运动规律是(A)。A.相同的B.不相同的C.不一定的第10章齿轮机构及其设计7.渐开线上某点的压力角是指该点所受压力的方向与该点(A)方向线之间所夹的锐角。A.绝对速度 B.相对速度 C.滑动速度 D.牵连速度8.渐开线在基圆上的压力角为(B)。A.20° B.0° C.15° D.25°9.渐开线标准齿轮是指m、α、ha*、c*均为标准值,且分度圆齿厚(C)《机械原理》第79页共79页
齿槽宽的齿轮。A.小于 B.大于 C.等于 D.小于且等于1.一对渐开线标准直齿圆柱齿轮要正确啮合,它们的(D)必须相等。A.直径 B.宽度 C.齿数 D.模数2.渐开线齿轮形状完全取决于(C)。A.压力角B.齿数C.基圆半径3.齿数大于42,压力角为20°的正常齿渐开线标准直齿外齿轮,其齿轮根圆(B)基圆。A.小于 B.大于 C.等于 D.小于且等于4.渐开线直齿圆柱齿轮与齿条啮合时,其啮合角恒等于齿轮(C)上的压力角。A.基圆 B.齿顶圆 C.分度圆 D.齿根圆5.用标准齿条型刀具加工ha*=1、α=20°的渐开线标准直齿轮时,不发生根切的最少齿数为(D)。A.14 B.15 C.16 D.176.斜齿圆柱齿轮的标准模数和标准压力角在(D)上。A.端面 B.轴面 C.主平面 D.法面7.已知一渐开线标准斜齿圆柱齿轮与斜齿条传动,法面模数mn=8mm,法面压力角αn=20°,斜齿轮的齿数z=20,分度圆上的螺旋角β=20°,则斜齿轮上的节圆直径等于(A)mm。A.170.27 B.169.27 C.171.27 D.172.278.在两轴的交错角∑=90°的蜗杆蜗轮传动中,蜗杆与蜗轮的螺旋线旋向必须(C)。A.相反B.相异 C.相同 D.相对9.渐开线直齿锥齿轮的当量齿数zV(D)其实际齿数Z。A .小于 B.小于且等于 C.等于 D.大于10.齿轮传动中(B),重合度越大。A.模数越大 B.齿数越多 C.中心距越小11.若忽略摩擦,一对渐开线齿廓从进入啮合到脱离啮合,齿廓间作用力方向(B),并且要沿着(D)方向。A.不断改变 B.维持不变 C.中心线D.基圆内公切线 E.节圆公切线12.渐开线齿轮传动的重合度随着齿轮(B)增大而增大,而与齿轮(C)无关。A.分度圆压力角 B.齿数 C.模数13.斜齿轮的端面压力角与法面压力角相比较应是(C) 。A. B. C. 《机械原理》第79页共79页
1.渐开线直齿轮发生根切在(B)场合.A.模数较大 B.齿数较少 C.模数较小2.一对渐开线圆柱齿轮标准安装时,其分度圆压力角(B) 。A.大于啮合角 B.等于啮合角 C.小于啮合角。3.变位齿轮与标准齿轮基圆的大小(A)。A.相等B.不相等C.不确定4.变位齿轮与标准齿轮在分度圆上的压力角(A)。A.相等B.不相等C.不确定5.渐开线齿轮齿条啮合时,若齿条相对齿轮作远离圆心的平移,其啮合角(B)。A.增大B.不变C.减少6.为保证一对渐开线齿轮可靠地连续传动,应使实际啮合线长度(C)基圆齿距。A.等于B.小于C.大于7.渐开线标准齿轮在标准安装情况下,两齿轮分度圆的相对位置应该是(C)。A.相交的B.分离的C.相切的8.齿轮根切现象发生在(D)的场合。A.模数较大B.模数较小C.齿数较多D.齿数较少9.重合度表示一对轮齿啮合的时间在齿轮转过一个基圆齿距的时间内占(A)。A.40%;B.60%;C.25%10.齿轮渐开线在(B)上的压力角和曲率半径最小。A.齿根圆B.基圆C.分度圆D.齿顶圆11.渐开线齿轮采用齿条型刀具加工时,刀具向轮坯中心靠近,是采用(B)。A.正变位;B.负变位;C.零变位。12.齿轮的渐开线形状取决于它的(C)直径。A.齿顶圆B.分度圆C.基圆13.为保证一对渐开线齿轮可靠地连续传动,重合度应(C)。A.等于0B.小于1C.大于114.用滚刀加工的斜齿圆柱齿轮的标准参数,以(A)为标准值。A.法面B.轴面C.端面15.为保证一对渐开线齿轮可靠地连续传动,应使实际啮合线长度(C)基圆齿距。A.等于B.小于C.大于《机械原理》第79页共79页
1.正变位齿轮与标准齿轮相比,其分度圆半径(C);其齿顶圆半径(A)。A.增大B.减小C.相等2.满足正确啮合传动的一对直齿圆柱齿轮,当传动比不等于1时,它们的渐开线齿形是(B)。A.相同的B.不相同的3.重合度εα=1.6表示在实际啮合线上有(C)长度属于双齿啮合区。A.60%B.40%C.75%4.直齿圆锥齿轮的标准模数是( B)。A.小端模数B.大端模数C.齿宽中点法向模数D.齿宽中点的平均模数5.与齿轮传动相比较,(B)不能作为蜗杆传动的优点。A.传动平稳,噪声小 B.传动效率高 C.可产生自锁 D.传动比大第11章齿轮系及其设计6.轮系运转时至少有一个齿轮的几何轴线相对于机架的位置是不固定的,而是绕另一个齿轮的几何轴线转动的轮系是()。 A.定轴轮系 B.周转轮系 C.混合轮系7.周转轮系是由( )构成。 A.行星轮和中心轮 B.行星轮、惰轮和中心轮C.行星轮、行星架和中心轮 D.行星轮、惰轮和行星架8.周转轮系中自由度为2,轮系是(B)。A.行星轮系B.差动轮系C.混合轮系9. 周转轮系的传动比计算应用了转化机构的概念。对应周转轮系的转化机构是()。A.定轴轮系 B.行星轮系 C.混合轮系 D.差动轮系第12章其它常用机构10.要将连续单向转动变换成具有停歇功能的单向转动,可采用的机构是()。A.曲柄摇杆机构B.摆动从动件盘形凸轮机构C.棘轮机构D.槽轮机构11.下列选项中每一个机构均可单独实现间歇运动的选项是()。A.棘轮机构、齿轮机构、槽轮机构《机械原理》第79页共79页
B.齿轮机构、四杆机构、槽轮机构C.棘轮机构、凸轮机构、槽轮机构1.在单向间歇运动机构中,()可以获得不同转向的间歇运动。A.不完全齿轮机构 B.圆柱凸轮间歇运动机构 C.棘轮机构D.槽轮机构2.在下列机构中,如曲柄滑块机构、铰链四杆机构、凸轮机构、不完全齿轮机构、棘轮机构、槽轮机构、螺旋机构,有()个能实现间歇运动。 A.2 B.3 C.4 D. 53.棘轮机构中采用止回棘爪的主要目的是()。A.防止棘轮反转B.对棘轮进行双向定位C.保证棘轮每次转过相同的角度4.用于微动装置的差动螺纹应由()两端螺纹组成。A.螺纹旋向相同,导程相差很大B.螺纹旋向相反,导程相差很大C.螺纹旋向相同,导程相差很小D.螺纹旋向相反,导程相差很小一.简答题(23题)1..什么是虚约束?答:在特定的几何条件下,有些约束所起的限制作用是重复的,这种不起独立限制作用的约束称为虚约束。2.机构可动的条件和机构具有确定的运动条件是什么?答:F>0时,原动件数大于机构自由度,机构遭到破坏;原动件数小于机构自由度,机构运动不确定;只有当原动件数等于机构自由度时,机构才具有确定的运动。3.作出三种含单个移动副的基本平面四杆机构的运动简图,并说明各种机构的名称。4.在曲柄等速转动的曲柄曲柄摇杆机构中,已知:曲柄的极位夹角θ=30°,摇杆工作时间为7秒,试问:(1)摇杆空回行程所需时间为若干秒?(2)曲柄每分钟转速是多少?答:(1)5s(2)5r/min5.在图示导杆机构中,已知:lAB=40mm,试问:(1)若机构成为摆动导杆时,lAC的最小值为多少?(2)AB为原动件时,机构的传动角为多大?(3)若lAC=50mm,且此机构成为转动导杆时,lAB的最小值为多少?《机械原理》第79页共79页
题2图 答:(1)(LAC)min>40mm;(2)γ恒为90°(3)(LAB)min=LAC=50mm1.在铰链四杆机构ABCD中,已知:lAD=400mm,lAB=150mm,lBC=350mm,lCD=300mm,且杆AB为原动件,杆AD为机架,试问构件AB能否作整周回转,为什么?答:构件AB能作整周回转。因为lAB+lAD=550mm<lBC+lCD=650mm,且AD为机架,构件AB为曲柄。2.平面铰链四杆机构存在曲柄的条件是什么?答:平面铰链四杆机构存在曲柄的条件是:1)最短杆和最长杆的长度之和小于等于其余两杆的长度之和;2)连架杆和机架中必有一最短杆。3.何谓行程速比系数?对心曲柄滑块机构行程速比系数等于多少?答:行程速比系数:从动件回程平均角速度和工作行程平均角速度之比。对于曲柄作匀速回转的对心曲柄滑块机构,其行程速比系数等于1。4.何谓机构的压力角?其值对机构的效率有何影响?答:在不计摩擦的情况下,从动件所受力的方向与该点的速度方向之间所夹的锐角称为机构在该位置的压力角。其值越大,机构的效率越低,所以要限制机构的压力角,使。5.试简述凸轮机构的优缺点。6.试作出凸轮机构中从动件的加速度线图,并比较几种常用运动规律的特点。7.在直动推杆盘形凸轮机构中,试问对于同一凸轮用不同端部形状的推杆,其推杆的运动规律是否相同?答:在直动推杆盘形凸轮机构中,对于同一凸轮用不同端部形状的推杆,其推杆的运动规律不全相同,尖顶和滚子的推杆,其运动规律相同,对平底推杆,其运动规律不同。8.如果滚子从动件盘形凸轮机构的实际轮廓线变尖或相交,可以采取哪些办法来解决?答:减小滚子半径,或增大基圆半径。9.何谓节圆?单个齿轮有没有节圆?什么情况下节圆与分度圆重合?《机械原理》第79页共79页
答:节点所在的圆;单个齿轮没有节圆;在标准安装情况下节圆与分度圆重合。1.何谓啮合角?啮合角和分度圆压力角及节圆压力角有什么关系?答:节点所在的压力角为啮合角;啮合角=节圆压力角;在标准安装情况下,分度圆压力角=节圆压力角,在非标准安装情况下,分度圆压力角不等于节圆压力角。2.何谓渐开线齿轮传动的可分性?如令一对标准齿轮的中心距稍大于标准中心距,能不能传动?有什么不良影响?答:渐开线齿轮传动的传动比等于两齿轮的基圆半径之比,与中心距无关,所以具有可分性。如令一对标准齿轮的中心距稍大于标准中心距,这对齿轮能传动,只是中心距增大后,重合度下降,影响齿轮的传动平稳性。3.当齿轮传动中的时,其安装中心距与标准中心距相比哪个中心距大?答:安装中心距大4.渐开线的形状取决于什么?若两个齿轮的模数和压力角分别相等,但齿数不同,它们的齿廓形状是否相同?答:渐开线的形状取决于基圆的大小。齿廓形状不同。5.渐开线直齿圆柱齿轮正确啮合条件是什么?满足正确啮合条件的一对齿轮是否一定能连续传动。答:1)渐开线直齿圆柱齿轮正确啮合条件是:两轮的法向齿距相等;对于标准齿轮,正确啮合条件是两轮的模数和压力角分别相等。2)满足正确啮合条件的一对齿轮,不一定能连续传动,这只是一个必要条件。6.何谓齿廓的根切现象?产生根切的原因是什么?如何避免根切?答:范成法加工外齿轮时,被加工齿轮的根部被刀具的刀刃切去一部分,这种现象称为根切现象。产生根切的原因是刀具的齿顶线(圆)超过了极限啮合点。要避免根切,通常有两种方法,一增加被加工齿轮的齿数,二改变刀具与齿轮的相对位置。7.螺旋角为45°的斜齿轮不发生根切的最少齿数是17吗?为什么?答:不是17。因为:8.已知用标准齿条型刀具加工标准直齿圆柱齿轮不发生根切的最少齿数,试推导出标准斜齿圆柱齿轮和直齿锥齿轮不发生根切的最少齿数。答:标准斜齿圆柱齿轮不发生根切的最少齿数直齿锥齿轮不发生根切的最少齿数9.为什么一对平行轴斜齿轮传动的重合度往往比一对直齿轮传动的重合度更大?答:平行轴斜齿轮的总的重合度为,而就是直齿轮的重合度,《机械原理》第79页共79页
一.判断题(105题)第2章机构结构分析1.当机构的自由度数大于零,且等于原动件数,则该机构具有确定的相对运动。(T)2.高副两元素之间相对运动有滚动和滑动时,其瞬心就在两元素的接触点。(F)3.在平面机构中,一个高副引入二个约束。(F)4.任何机构的从动件系统的自由度都等于零。(T)5.两构件之间以点、线接触所组成的平面运动副称为高副,它产生两个约束,而保留一个自由度。(F)第3章平面机构的运动分析6.在图4-1所示机构中,已知ω1及机构尺寸,为求解C2点的加速度,只要列出一个矢量方程就可以用图解法将求出。(F) 图 4-1 图4-27.在用相对运动图解法讨论图4-2中杆2和杆3上的瞬时重合点的速度和加速度关系时,可以选择任意点作为瞬时重合点。(F)8.平面连杆机构的活动件数为n,则可构成的机构瞬心数是n(n+1)/2。(F)9.在平面机构中,不与机架直接相连的构件上任一点的绝对速度均不为零。(F)10.两构件组成一般情况的高副即非纯滚动高副时,其瞬心就在高副接触点处。(F)11.在同一构件上,任意两点的绝对加速度间的关系式中不包含哥氏加速度。(T)12.当牵连运动为转动,相对运动是移动时,一定会产生哥氏加速度。(F)13.在考虑摩擦的转动副中,当匀速转动时,总反力作用线永远切于摩擦圆。(T)14.在单缸内燃机中若不计运动副的摩擦,则活塞在任何位置均可驱动曲柄。(F)15.非周期性速度波动可用飞轮调节速度波动(F)第8章平面连杆机构及其设计16.任何一种曲柄滑块机构,当曲柄为原动件时,它的行程速比系数K=1。(F)17.在摆动导杆机构中,若取曲柄为原动件时,机构无死点位置;《机械原理》第79页共79页
而取导杆为原动件时,则机构有两个死点位置。(T )1.在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。(T)2.在铰链四杆机构中,凡是双曲柄机构,其杆长关系必须满足:最短杆与最长杆杆长之和大于其它两杆杆长之和。(F)3.铰链四杆机构是由平面低副组成的四杆机构。(T)4.任何平面四杆机构出现死点时,都是不利的,因此应设法避免。(F)5.平面四杆机构有无急回特性取决于极位夹角是否大于零。(T)6.平面四杆机构的传动角在机构运动过程中是时刻变化的,为保证机构的动力性能,应限制其最小值γ不小于某一许用值[γ]。(T)7.在曲柄摇杆机构中,若以曲柄为原动件时,最小传动角γmin可能出现在曲柄与机架两个共线位置之一处。(T)8.在偏置曲柄滑块机构中,若以曲柄为原动件时,最小传动角γmin可能出现在曲柄与机架(即滑块的导路)相平行的位置。(F)9.摆动导杆机构不存在急回特性。(F)10.增大构件的惯性,是机构通过死点位置的唯一办法。(F)11.平面连杆机构中,从动件同连杆两次共线的位置,出现最小传动角。(F)12.双摇杆机构不会出现死点位置。(F)13.凡曲柄摇杆机构,极位夹角θ必不等于0,故它总具有急回特征。(F)14.图4-3所示铰链四杆机构ABCD中,可变长度的a杆在某种合适的长度下,它能获得曲柄摇杆机构。(F)图4-315.在铰链四杆机构中,若存在曲柄,则曲柄一定为最短杆。(F)16.当曲柄摇杆机构把往复摆动运动转变成旋转运动时,曲柄与连杆共线的位置,就是曲柄的“死点”位置。(T)17.杆长不等的双曲柄机构无死点位置。(T)18.在转动导杆机构中,不论取曲柄或导杆为原动件,机构均无死点位置。(T)19.摆动导杆机构,曲柄作主动件,其压力角永远为零。(T)20.在曲柄摇杆机构中,摇杆达到极限位置时,曲柄与机架共线。(F)《机械原理》第79页共79页
1.在曲柄摇杆机构中,曲柄为主动件时,最小传动角γmin出现在曲柄与连杆共线的位置。(F)2.对心的曲柄滑块机构,其行程速比系数K一定等于1。(T)3.在铰链四杆机构中,只要满足杆长和条件,则该机构一定有曲柄存在。(F)4.在铰链四杆机构中,若以曲柄为原动件时,机构会出现死点位置。(F)5.在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。(T)6.平面四杆机构有无急回特性取决于极位夹角是否大于零。(T)第9章凸轮机构及其设计7.当凸轮机构的压力角的最大值超过许用值时,就必然出现自锁现象。(F)8.凸轮机构中,滚子从动件使用最多,因为它是三种从动件中的最基本形式。(F)9.直动平底从动件盘形凸轮机构工作中,其压力角始终不变。(T)10.滚子从动件盘形凸轮机构中,基圆半径和压力角应在凸轮的实际廓线上来度量。(F)11.从动件按等加速等减速运动规律运动是指从动件在推程中按等加速运动,而在回程中则按等减速运动,且它们的绝对值相等。(F)12.在直动从动件盘形凸轮机构中,无论选取何种运动规律,从动件回程加速度均为负值。(F)13.凸轮的理论廓线与实际廓线几何尺寸不同,但其形状总是相似的。(F)14.设计对心直动平底从动件盘形凸轮机构时,若要求平底与导路中心线垂直,则平底左右两侧的宽度必须分别大于导路中心线到左右两侧最远切点的距离,以保证在所有位置平底都能与凸轮廓线相切。(T)15.在盘形凸轮机构中,其对心直动尖顶从动件的位移变化与相应实际廓线极径增量的变化相等。(T)16.在盘形凸轮机构中,对心直动滚子从动件的位移变化与相应理论廓线极径增量变化相等。(T)17.平底直动从动件盘形凸轮机构的压力角永远为零。(T)18.在直动从动件盘形凸轮机构中,若从动件运动规律不变,增大基圆半径,则压力角将减小。(T)19.滚子从动件盘形凸轮的实际轮廓曲线是理论轮廓曲线的等距曲线。(T)20.滚子从动件盘形凸轮的基圆半径和压力角应在凸轮的理论轮廓上度量。(T)《机械原理》第79页共79页
第10章齿轮机构及其设计1.一对外啮合的直齿圆柱标准齿轮,小轮的齿根厚度比大轮的齿根厚度大。(F)2.一对渐开线直齿圆柱齿轮的正确啮合条件是pb1=pb2。(T)3.一对能正确啮合传动的渐开线直齿圆柱齿轮,其啮合角一定为20°。(F)4.一对直齿圆柱齿轮啮合传动,模数越大,重合度也越大。(F)5.一对相互啮合的直齿圆柱齿轮的安装中心距加大时,其分度圆压力角也随之加大。(F)6.标准直齿圆柱齿轮传动的实际中心距恒等于标准中心距。(F)7.渐开线标准齿轮的齿根圆恒大于基圆。(F)8.渐开线直齿圆柱齿轮同一基圆的两同向渐开线为等距线。(T)9.一个渐开线圆柱外齿轮,当基圆大于齿根圆时,基圆以内部分的齿廓曲线,都不是渐开线。(T)10.根据渐开线性质,基圆内无渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大。(F)11.对于单个齿轮来说,分度圆半径就等于节圆半径。(F)12.根据渐开线性质,基圆之内没有渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大些。(F)13.所谓直齿圆柱标准齿轮就是分度圆上的压力角和模数均为标准值的齿轮。(F)14.共轭齿廓就是一对能满足齿廓啮合基本定律的齿廓。(T)15.齿廓啮合基本定律就是使齿廓能保持连续传动的定律。(F)16.渐开线齿廓上各点的曲率半径处处不等,基圆处的曲率半径为rb。(F)17.渐开线齿廓上某点的曲率半径就是该点的回转半径。(F)18.在渐开线齿轮传动中,齿轮与齿条传动的啮合角始终与分度圆上的压力角相等。(T)19.用范成法切制渐开线直齿圆柱齿轮发生根切的原因是齿轮太小了,大的齿轮就不会根切。(F)20.范成法切削渐开线齿轮时,模数为m、压力角为α的刀具可以切削相同模数和压力角的任何齿数的齿轮。(T)21.影响渐开线齿廓形状的参数有z、α等,但同模数无关。(F)22.在直齿圆柱齿轮传动中,齿厚和齿槽宽相等的圆一定是分度圆。(F)23.满足正确啮合条件的大小两直齿圆柱齿轮齿形相同(F)24.渐开线标准直齿圆柱齿轮A,分别同时与齿轮B、C啮合传动,则齿轮A上的分度圆只有一个,但节圆可以有两个。(T)《机械原理》第79页共79页
1.标准齿轮就是模数、压力角及齿顶高系数均为标准值的齿轮。(F)2.两对标准安装的渐开线标准直齿圆柱齿轮,各轮齿数和压力角均对应相等,第一对齿轮的模数m=4mm,第二对齿轮的模数m=5mm,则第二对齿轮传动的重合度必定大于第一对齿轮的重合度。(F)3.因为渐开线齿轮传动具有轮心可分性,所以实际中心距稍大于两轮分度圆半径之和,仍可满足一对标准齿轮的无侧隙啮合传动。(F)4.一对渐开线直齿圆柱齿轮在节点处啮合时的相对滑动速度大于在其他点啮合时的相对滑动速度。(F)5.重合度ε=1.35表示在转过一个基圆周节pb的时间T内,35%的时间为一对齿啮合,其余65%的时间为两对齿啮合。(F)6.在所有渐开线直齿圆柱外齿轮中,在齿顶圆与齿根圆间的齿廓上任一点K均满足关系式rK=rb/cosαK。(F)7.α=20°、ha*=1的一对渐开线标准圆柱直齿轮传动,不可能有三对齿同时啮合。(T)8.用齿轮滚刀加工一个渐开线直齿圆柱标准齿轮,如不发生根切则改用齿轮插刀加工该标准齿轮时,也必定不会发生根切。(T)9.两个渐开线直齿圆柱齿轮的齿数不同,但基圆直径相同,则它们一定可以用同一把齿轮铣刀加工。(F)10.一个渐开线标准直齿圆柱齿轮和一个变位直齿圆柱齿轮,它们的模数和压力角分别相等,它们能够正确啮合,而且它们的顶隙也是标准的。(F)11.一个渐开线直齿圆柱齿轮同一个渐开线斜齿圆柱齿轮是无法配对啮合的。(T)12.齿数、模数分别对应相同的一对渐开线直齿圆柱齿轮传动和一对斜齿圆柱齿轮传动, 后者的重合度比前者要大。(T)13.蜗轮蜗杆传动在蜗轮的轴剖面的啮合相当于齿轮与齿条的啮合。(F)14.平行轴斜齿圆柱齿轮外啮合传动时的正确啮合条件为:m1t=m2t=m,α1t=αt2=α,β1=β2,且螺线方向相反。(T)15.两直齿圆柱齿轮啮合传动时的正确啮合条件为:m1=m2=m,α1=α2=α。(T)16.一对直齿轮啮合传动,模数越大,重合度也越大。(F)17.一对相啮合的标准齿轮,小齿轮齿根厚度比大齿轮的齿根厚度小。(T)18.根据渐开线性质,基圆内无渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大。(F)19.一对相啮合的标准齿轮,小轮的齿根厚度比大轮的齿根厚度大。(F)20.一对直齿轮啮合传动,模数越大,重合度也越大。(F)《机械原理》第79页共79页
1.对于单个标准齿轮来说,节圆半径就等于分度圆半径。(F)第11章齿轮系及其设计2.定轴轮系的传动比等于各对齿轮传动比的连乘积。(T)3.周转轮系的传动比等于各对齿轮传动比的连乘积。(F)4.周转轮系的转化机构是一定轴轮系。(T)五分析计算题(共103题)第2章机构结构分析1.试计算图示机构的自由度(若有复合铰链、局部自由度或虚约束,必须明确指出)。并判断该机构的运动是否确定(标有箭头的机构为原动件)。若其运动是确定的,要进行杆组分析,并显示出拆组过程,指出各级杆组的级别、数目以及机构的级别。 图a) 图b)题1图1、解: (a)图:n=9,p4=13,p5=0;F=3×9-2×13=1;∵原动件数目=机构自由度数,∴机构具有确定的运动。G处为复合铰链;机构级别为Ⅱ级。拆组图如下(略)(b)图:n=7,p4=10,p5=0;F=3×7-2×10=1;原动件数目=机构自由度数,机构具有确定的运动。机构级别为Ⅲ级。2.计算图示机构自由度,并判定该机构是否具有确定的运动(标有箭头的构件为原动件)。《机械原理》第79页共79页
图a) 图b)题2图解:(a)F=3n×2pl-ph=3×5-2×7=1;机构具有确定的运动。(b)F处为复合铰链。机构没有确定的运动。1.计算图示机构自由度,并确定应给原动件的数目。 图a 图b题3图解:a)F=3n×2pl-ph=3×7-2×10=1;原动件数=1 b)n=8,pl=11,ph=1;F=3n×2pl-ph=1;原动件数=1。2.在图示机构中试分析计算该机构的自由度数,若有复合铰链、局部自由度或虚约束,则在图上明确指出。 《机械原理》第79页共79页
图a 图b题4图解:a)E处为局部自由度。 b)n=7,pl=10;F、D处为复合铰链。1.计算下列机构的自由度(有复合铰链、虚约束和局部自由度请指出) 图 a) 图 b)题5图解:(a)n=4,pl=4,Ph=2;A处为复合铰链。(b)n=5,pl=7,Ph=1;F处为虚约束,D处为局部自由度。2.计算图示机构的自由度(如有复合铰链、局部自由度和虚约束,应指出)。题6图解:n=6,pl=8,Ph=1;B处为局部自由度。3.在题7图所示所有机构中,原动件数目均为1时,判断图示机构是否有确定的运动。如有局部自由度、复合铰链和虚约束请予以指出。《机械原理》第79页共79页
题7图解:(a)、,机构有确定的运动。其中:F、D、B、C四处均为复合铰链,没有局部自由度、虚约束;(b)、,机构没有确定的运动。其中:A处为复合铰链,K处为局部自由度,没有虚约束;(C)、,机构有确定的运动。其中:A、B、C、D四处均为复合铰链,AB、BC、CD、AD四杆中有一杆为虚约束,没有局部自由度;(d)、,机构有确定的运动。没有局部自由度、复合铰链、虚约束;(e)、,机构没有确定的运动。没有局部自由度、复合铰链、虚约束。1.计算题8图所示齿轮-连杆机构的自由度。题8图《机械原理》第79页共79页
解:(a)、(b)、题9图1.计算题9图所示机构的自由度。解:(a)、(b)、(注:滑块D的运动轨迹与C的运动轨迹相重合,所以滑块D及其上的转动副和移动副均应视为虚约束。)2.构思出自由度分别为1、2和3的Ⅲ级机构的设计方案。解:自由度分别为1、2和3的Ⅲ级机构分别如下图(a)、(b)和(c)所示。3.确定题11图所示机构当构件8为原动件时机构的级别。题11图解:当构件8为原动件时,图示机构去掉原动件和机架后可以拆分为3个Ⅱ级杆组,如下图示,所以该机构为Ⅱ级机构。4.题12图为一个对心直动滚子从动件盘形凸轮机构,凸轮为原动件,图示位置时凸轮在与滚子接触点B的曲率中心在点《机械原理》第79页共79页
。试对机构进行高副低代,并确定机构的级别,验证替代前后机构的自由度、凸轮1与从动件2之间的速度瞬心都没有发生变化。解:增加一个新的构件与原构件1和从动件2分别在高副接触点的曲率中心和原滚子中心以转动副相联接,如图(b)所示,就完成了原高副机构的高副低代。该机构去掉原动件和机架后为一个Ⅱ级杆组,所以原机构为Ⅱ级机构。替代前机构的自由度为;替代后机构的自由度为;高副低代替代前凸轮1与从动件2之间的速度瞬心在过高副接触点B的公法线n-n和瞬心、的连线的交点处,如图(a)所示;替代后凸轮1与从动件2之间的速度瞬心在瞬心和的连线与瞬心和的连线的交点处,如图(b)所示。即替代前后机构的自由度、凸轮1与从动件2之间的速度瞬心都没有发生变化。第3章平面机构的运动分析1.在图示的凸轮机构中,已知凸轮1以等角速度ω1=10rad/s转动。凸轮为一偏心圆,其半径R1=25mm,LAB=15mm,LAD=50mm,φ1=90°,试用瞬心法求机构2的角速度ω2。《机械原理》第79页共79页
题13图 解:1)作出瞬心(略);2)1.在图示机构中,已知长度LAB=LBC=20mm,LCD=40mm,α=β=90°,ω1=100rad/s,请用速度瞬心法求C点的速度的大小和方向。题14图题15图2.在题15图所示的铰链四杆机构中,已知该机构的结构参数以及构件1的转速为,机构运动简图的比例尺为。利用速度瞬心法,求在图示位置时,构件2和构件3的转速和的大小和方向。解:首先找出相关的速度瞬心:速度瞬心P10、P12、P23、P03可根据相应的构件构成转动副直接确定出来;而P02和P13需应用三心定理来确定:速度瞬心P02应在三个构件0、1、2的两个已知速度瞬心P10和P12的连线上,同时又应在三个构件0、3、2的两个已知速度瞬心P03、P23的连线上,则这两条连线的交点即为P02。速度瞬心P13的确定方法类似,它应是P12P23连线和P10P03连线的交点。《机械原理》第79页共79页
由速度瞬心的概念,在速度瞬心点两构件的绝对速度相同,便可求解未知转速。在速度瞬心点P12有
式中和可直接从所作的图中量取。由上式可解出由绝对速度方向,得出ω2方向为顺时针方向。同理,在速度瞬心点P13有由绝对速度的方向,可知其为逆时针方向。1.题16图所示的凸轮机构,已知该机构的结构尺寸和凸轮1的角速度。利用瞬心法,求机构在图示位置时从动件2的线速度。机构运动简图的比例尺为。题16图解:构件1与机架0的速度瞬心P01以及从动件与机架的速度瞬心P02可根据相应的构件分别构成转动副和移动副而直接确定出来。凸轮1和从动件之间的瞬心P12的确定方法是:一方面,P12应在构件1、2高副接触点K的公法线n-n上,另一方面,利用三心定理,它又应在瞬心P01和P02的连线上,即又应在过点P01而垂直于从动件2与机架移动副导路的直线上。因而,n-n与该直线的交点即为P12。再根据速度瞬心的概念,可得:其中,可以直接从图中量出。从动件的速度v2方向如图中所示。题17图2.在题17图所示的平面组合机构中,已知机构作图的比例尺μl,及构件1的角速度,求图示位置构件4的线速度。《机械原理》第79页共79页
解:已知构件1的角速度,求构件4的线速度,因而需求出速度瞬心,一方面,应在瞬心和的连线上,另一方面,它也应在瞬心和的连线上。其中:瞬心一方面应在构件1、2高副接触点的公法线n-n上,另一方面,它也应在瞬心和的连线上。瞬心一方面应在瞬心和的连线上,另一方面,它也应在瞬心和的连线上。根据速度瞬心的概念,可得,其中,可以直接从图中量出。构件4的速度方向如图中所示。题18图1.确定题18图所示机构所有的速度瞬心。如果已知构件1的角速度,设图示比例为,求图示位置时,题18图(a)齿轮4的角速度的大小、方向和题82图(b)构件3的速度的大小和方向。解:(a)、图示机构共有6个构件,所以速度瞬心的数目为《机械原理》第79页共79页
。其中:、和在转动副处;、和在转动副处;在转动副处;在转动副处;在齿轮2和齿轮3的基圆切点处;在齿轮2和齿轮4的基圆切点处;在瞬心和的连线与瞬心和的连线的交点处;在瞬心和的连线与瞬心和的连线的交点处;在瞬心和的连线与瞬心和的连线的交点处;在瞬心和的连线与瞬心和的连线的交点处;在瞬心和的连线与瞬心和的连线的交点处。根据速度瞬心的概念,可得,从而可先求出构件3的角速度,其中,和可以直接从图中量出,构件3的速度方向如图中所示;再根据速度瞬心的概念,可得,从而可求出构件4的角速度,其中,和可以直接从图中量出,构件4的速度方向如图中所示。(b)、图示机构共有4个构件,所以速度瞬心的数目为。其中:《机械原理》第79页共79页
和分别在构件1和构件4、构件2和构件4形成的转动副处;在垂直于移动副导路的无穷远处;在过高副接触点B的公法线n-n和瞬心、的连线的交点处;在过高副接触点C的公法线和瞬心、的连线的交点处;在瞬心和的连线与瞬心和的连线的交点处。根据速度瞬心的概念,可得,其中,可以直接从图中量出。构件3的速度方向如图中所示。1.试标出下列图示机构的全部速度瞬心。 (a) (b) ( c)题19图第8章平面连杆机构及其设计2.如图所示偏置曲柄滑块机构。若已知a=20mm,b=40mm,e=10mm,试用作图法求出此机构的极位夹角θ、行程速比系数K、行程S,并标出图示位置的传动角。 题20图3.判断下列图示机构为何种铰链四杆机构?并简要说明理由(图中数字代表杆件长度)《机械原理》第79页共79页
题21图1. 在图示铰链四杆机构中,已知:lBC=50mm,lCD=35mm,lAD=30mm,AD为机架。试问:(1)若此机构为曲柄摇杆机构,且AB为曲柄,求lAB的最大值;(2)若此机构为双曲柄机构,求lAB的最小值;(3)若此机构为双摇杆机构,求lAB的取值范围。题22图 解: (1)因AD为机架,AB为曲柄,故AB为最短杆,有lAB+lBC≤lCD+lAD则:lAB≤lCD+lAD-lBC=(35+30-50)mm=15mm;所以lAB的最大值为15mm。(2)因AD为机架,AB及CD均为曲柄,故AD为最短杆,有下列两种情况:若BC为最长杆,则:lAB<lBC=50mm,且lAD+lBC≤lCD+lAB,故lAB≥lAD+lBC-lCD=(30+50-35)mm=45mm,所以:45mm≤lAB<50mm。若AB为最长杆,则:lAB>lBC=50mm,且lAD+lAB≤lBC+lCD,故lAB≤lBC+lCD-lAD=(50+35-30)mm=55mm,所以:50mm<lAB≤55mm。综上所述:lAB的最小值为45mm。(3)如果机构尺寸不满足杆长条件,则机构必为双摇杆机构。若AB为最短杆,则:lBC+lAB>lCD+lAD,故《机械原理》第79页共79页
lAB>lCD+lAD-lBC=(35+30-50)mm=15mm,若AB为最长杆,则:lAD+lAB>lBC+lCD,故lAB>lCD+lBC-lAD=(50+35-30)mm=55mm,若AB既不为最长杆也不为最短杆,则:lAD+lBC>lCD+lAB,故lAB<lAD+lBC-lCD=(30+50-35)mm=45mm,综上所述:若要保证机构成立,则应有:lAB<lCD+lBC+lAD=(30+50+35)mm=115mm,故当该机构为双摇杆机构时,lAB的取值范围为:15mm<lAB<45mm,和55mm<lAB<115mm,1.试设计如图所示的六杆机构。当原动件OAA自OAy轴沿顺时针转过φ12=60°到达L2时,构件OBB1顺时针转过ψ12=45°,恰与OAx轴重合。此时,滑块6在OAx轴上自C1移动到C2,其位移S12=20mm,滑块C1距OB的距离为OBC1=60mm,试用几何法确定A1和B1点的位置。题23图2.已知曲柄摇杆机构ABCD各杆杆长分别为AB=50mm,BC=220mm,CD=100mm,最小允许传动角[γmin]=60°,试确定机架长度AD的尺寸范围。解:240.79mm≤LAD≤270mm3.在铰链四杆机构ABCD中,已知LAB=30mm,LBC=75mm,LCD=50mm,且AB为原动件,AD为机架。试求该机构为曲柄摇杆机构时LAD的长度范围。解:55mm≤LAD≤75mm4.在如题26图所示曲柄摇杆机构中,已知AD=600mm,CD=500mm,摇杆摆角φ=60°,摇杆左极限与AD夹角φ1=60°,试确定曲柄和连杆长度。题26图 《机械原理》第79页共79页
解:LAB=198.5mm,LBC=755.5mm,1.设计一脚踏轧棉机曲柄摇杆机构,要求踏板CD极限位置在水平线上下各15°,并且CD=500mm,AD=1000mm(AD垂直地面),求AB和BC长度。题27图解:设AB=a,BC=b2.一偏置曲柄滑块机构,偏距e=10mm,曲柄长度AB=20mm,连杆长度BC=70mm。试用图解法:①求出滑块的行程H;②画出曲柄为原动件时的最大压力角αmax;③画出滑块为原动件时机构的死点位置。3.设计一偏置曲柄滑块机构。要求滑块行程为40mm,行程速比系数K=1.5,滑块在行程端点的最大压力角为45°。求曲柄、连杆的长度和偏距。4.四杆机构。已知LAB=62mm,LBC=40mm,LCD=40mm,LAD=19mm。试问:(1)该机构为何种机构,有无曲柄存在?如有,指出哪个构件为曲柄。(2)当以LAB为主动件时,标出从动件的压力角。《机械原理》第79页共79页
题72图1.在一偏置曲柄滑块机构中,滑块导路方向线在曲柄转动中心之上。已知曲柄a=70mm,连杆b=200mm,偏距e=30mm,曲柄转速n1=500r/min。(1)求滑块行程长度;(2)分别求滑块正、反行程的平均速度;(3)画出当滑块为主动时的机构死点位置。2.一曲柄摇杆机构,已知机架AD=100mm,摇杆CD=75mm,摇杆的一个极限位置与机架的夹角为45°,行程速比系数K=1.5,试确定曲柄长AB和连杆长BC。解: 3.设计一曲柄滑块机构。已知滑块的行程s=50mm,偏距e=16mm,行程速度变化系数K=1.4,求曲柄和连杆的长度。4.在图所示的铰链四杆机构中,各杆的长度为,,,,当取杆4为机架时,求机构的极位夹角θ,杆3的最大摆角,机构的最小传动角(结果可以作图量取)。《机械原理》第79页共79页
题34图1.如图所示曲柄滑块机构,曲柄AB等速整周回转。1.设曲柄为主动件,滑块朝右为工作行程,确定曲柄的合理转向,简要说明理由;2.设曲柄为主动件,画出极位夹角,最小传动角出现的位置;3.此机构在什么情况下,出现死点位置,指出死点位置。题35图解:1.曲柄为主动件,曲柄AB由运动到位置,滑块由左极限位置运动到右极限位置,滑块朝右为工作行程,对应曲柄的转角为,所需时间;曲柄AB由运动到位置,滑块由右极限位置运动到左极限位置,滑块朝左为空行程,对应曲柄的转角为,所需时间。为了保证滑块在空行程具有急回特性,即。则曲柄的合理转向必为逆时针方向。如图所示。2.以曲柄为主动件,极位夹角,最小传动角的位置如图所示;3.此机构在以滑块为主动件的情况下,出现死点位置,其死点位置为和两个位置。2.设计一曲柄摇杆机构。已知LAD=75mm,LCD=60mm,当曲柄转角φ=150°时摇杆处于右极限位置,要求机构行程速比系数K=1.18182。《机械原理》第79页共79页
解:选取绘图比例尺μL=0.002m/mm。其中:θ=180°×(K-1)/(K+1)=15°按已知条件作出固定铰链点A和D;按φ=150°过A点作射线交由D点为圆心,以LCD为半径的C点所在圆(有两个交点,即两组解),图中为C2点;作AC1,使∠C2AC1为θ(=15°),得到C1点。因为:LAC2=(LAB+LBC)/2LAC1=(LBC-LAB)/2所以有:LAB=97mm,LBC=15mm。1.设计一个偏心曲柄滑块机构。已知滑块两极限位置之间的距离,导路的偏距e=20㎜,机构的行程速比系数K=1.5。试确定曲柄和连杆的长度,。解:行程速比系数K=1.5,则机构的极位夹角为选定作图比例,先画出滑块的两个极限位置C1和C2,再分别过点C1、C2作与直线成的射线,两射线将于点O。以点O为圆心,OC2为半径作圆,最后再作一条与直线C1C2相距为的直线,该直线与先前所作的圆的交点就是固定铰链点A。作图过程如图所示。直接由图中量取,,所以曲柄AB的长度为《机械原理》第79页共79页
连杆BC的长度为题38图1.在题38图的四杆闭运动链中,已知,,,。欲设计一个铰链四杆机构,机构的输入运动为单向连续转动,确定在下列情况下,应取哪一个构件为机架?①输出运动为往复摆动;②输出运动也为单向连续转动。解:①当输出运动为往复摆动时,机构应为曲柄摇杆机构,此时应取四杆中最短杆的相邻杆,即b或d作为机架。②当输出运动也为单向连续转动时,机构应为双曲柄机构,此时应取四杆中的最短杆,即a作为机架。题39图2.在题39图(a)、(b)中(1)说明如何从一个曲柄摇杆机构演化为题39图a的曲柄滑块机构、再演化为题39图b的摆动导杆机构;(2)确定构件AB为曲柄的条件;(3)当题39图a为偏置曲柄滑块机构,而题39《机械原理》第79页共79页
图b为摆动导杆机构时,画出构件3的极限位置,并标出极位夹角。解:(1)当曲柄摇杆机构的摇杆为无穷长时,则原来摇杆与机架之间的转动副就变为移动副,原机构就演化为了题39图a的曲柄滑块机构。如果取原来的连杆作为机架,则曲柄滑块机构就演化为了题39图b的摆动导杆机构。(2)对于图(a),构件AB为曲柄的条件是;对于图(b),只要导杆BC足够长,满足装配要求,则构件AB始终为曲柄。(3)对于图(a),构件3的极限位置在曲柄1和连杆2的两次共线处,其极限位置、和极位夹角如图(a)所示;对于图(b),构件3的极限位置在曲柄1与滑块2形成的转动副B的轨迹圆与导杆3的切线处,其极限位置、和极位夹角如图(b)所示。1.题40图为开槽机上用的急回机构。原动件BC匀速转动,已知,,,。(1)确定滑块F的上、下极限位置;(2)确定机构的极位夹角;(3)欲使极位夹角增大,杆长BC应当如何调整?《机械原理》第79页共79页
解:(1)滑块F的上、下极限位置如图中F2、F1的位置。(1)由图中几何关系,得极位夹角。题40图(3)欲使极位夹角增大,应使角减小,所以杆长BC就当减小。1.设计一个铰链四杆机构,如题41图所示。已知摇杆CD的长度,机架AD的长度,摇杆的一个极限位置与机架之间的夹角,构件AB单向匀速转动。试按下列情况确定构件AB和BC的杆长,以及摇杆的摆角。(1)行程速比系数K=1;(2)行程速比系数K=1.5。解:(1)、当行程速比系数K=1时,机构的极位夹角为题41图《机械原理》第79页共79页
即机构没有急回特性,固定铰链点A应在活动铰链点C的两个极限位置C1、C2的连线上,从而可确定活动铰链点C的另一个极限位置。选定比例尺,作图,如下图(a)所示。直接由图中量取,,所以构件AB的长为构件BC的长为摇杆的摆角(2)、当行程速比系数K=1.5时,机构的极位夹角为即机构具有急回特性,过固定铰链点A作一条与已知直线成的直线再与活动铰链点C的轨迹圆相交,交点就是活动铰链点C的另一个极限位置。选定比例尺,作图,如下图(b)所示。由图(b)可知,有两个交点,即有两组解。直接由图中量取,,。故有解一:构件AB的长为构件BC的长为摇杆的摆角解二:《机械原理》第79页共79页
构件AB的长为构件BC的长为摇杆的摆角1.试求出题42图中机构的最小传动角和最大压力角。题42图解:(a)、所以最大压力角最小传动角(b)、最大压力角最小传动角《机械原理》第79页共79页
1.标出题43图所示机构在图示位置的传动角。题43图解:图示机构在图示位置的传动角分别如图中所示。题44图2.在题44图所示的机构中,以构件1为主动件机构是否会出现死点位置?以构件3为主动件,机构是否会出现死点位置?画出机构的死点位置,并标明机构的主动件是哪一个构件。解:在图示机构中,当以构件1为主动件时,机构不会出现死点位置;当以构件3为主动件时,机构会出现死点位置,其死点位置分别如下图示。《机械原理》第79页共79页
第9章凸轮机构及其设计1.如图为偏置直动尖顶推杆盘形凸轮机构,凸轮廓线为渐开线,渐开线的基圆半径r0=40mm,凸轮以ω=20rad/s逆时针旋转。试求:(1)在B点接触时推杆的速度VB;(2)推杆的运动规律(推程);(3)凸轮机构在B点接触时的压力角;(4)试分析该凸轮机构在推程开始时有无冲击?是哪种冲击?解:1)方向朝上2)假设推杆与凸轮在A点接触时凸轮的转角为零,则推杆的运动规律为:3)因导路方向与接触点的公法线重合,所以压力角α=0°4)有冲击,是刚性冲击。2.题46图所示对心直动尖顶推杆盘形凸轮机构中,凸轮为一偏心圆,O为凸轮的几何中心,O1为凸轮的回转中心。直线AC与BD垂直,且,试计算: (1)该凸轮机构中B、D两点的压力角; (2)该凸轮机构推杆的行程h。解:(1)由图可知,B、D两点的压力角为:题46图《机械原理》第79页共79页
1.如题47图所示,已知一偏心圆盘R=40mm,滚子半径rT=10mm,LOA=90mm,LAB=70mm,转轴O到圆盘中心C的距离LOC=20mm,圆盘逆时针方向回转。(1)标出凸轮机构在图示位置时的压力角α,画出基圆,求基圆半径r0;(2)作出推杆由最下位置摆到图示位置时,推杆摆过的角度φ及相应的凸轮转角δ。题47图解:取尺寸比例尺作图,得1)图示位置凸轮机构的压力角为α=27.5°,基圆半径r0=30mm;2)推杆由最下位置摆到图示位置时所转过的角度为φ=17°,相应的凸轮转角δ=90°。2.如题48图所示为偏置直动推杆盘形凸轮机构,AFB、CD为圆弧,AD、BC为直线,A、B为直线与圆弧AFB的切点。已知e=8mm,r0=15mm,,∠COD=30°,试求:(1)推杆的升程h,凸轮推程运动角为δ0,回程运动角和远休止角δ02;(2)推杆推程最大压力角的数值及出现的位置;(3)推杆回程最大压力角的数值及出现的位置。《机械原理》第79页共79页
题48图解:取尺寸比例尺作图,得:1)推杆的升程h=27mm,凸轮推程运动角δ0=79°,回程运动角=44°,远休止角δ02=208°2)推程段最大压力角出现在D点,其值为αmax=44°3)回程段最大压力角出现在C点,其值为=71°1.已知偏置式滚子推杆盘形凸轮机构(如图所示),试用图解法求出推杆的运动规律s-δ曲线(要求清楚标明坐标(s-δ)与凸轮上详细对应点号位置,可不必写步骤)。 题49图解:作图过程略《机械原理》第79页共79页
1.在如图所示的凸轮机构中,弧形表面的摆动推杆与凸轮在B点接触。当凸轮从图示位置逆时针转过90°后,试用图解法求出或标出:(1)推杆与凸轮的接触点;(2)推杆摆动的角度大小;(3)该位置处凸轮机构的压力角。题50图解:用反转法求出该位置处,凸轮机构的压力角2.题51图示为偏置滚子从动件盘形凸轮机构。试确定:题51图《机械原理》第79页共79页
(1)基圆半径rb;(2)图示位置升程h1,α1;(3)凸轮转过90º时的升程h2,α2,该机构存在什么问题?应怎么办解:(1)基圆半径ro(4分);(2)图示位置升程h1,α1;(3)凸轮转过90º时的升程h2,α2,压力角过大,采取措施:增大基圆半径或减小滚子半径1.请按以下要求并按1∶1的比例,画出推杆的位移线图和凸轮轮廓曲线。已知基圆半径20mm,尖顶式从动杆在工作中受力方向通过凸轮的旋转中心,当凸轮逆时针转180º时,从动杆按余弦运动规律上升25mm,紧接着突然下降到原高度,而后就静止不动。解:2.图示凸轮机构中,其凸轮廓线的AB段是以C为圆心的一段圆弧。试求:(1)写出基圆半径的表达式;(2)在图中标出图示位置时的凸轮转角、推杆位移S、机构的压力角。《机械原理》第79页共79页
题87图 解:1)基圆半径的表达式2)图示位置时的凸轮转角、推杆位移S、机构的压力角如图所示。1.图示凸轮机构。在图中画出凸轮的基圆、偏距圆及理论廓线。《机械原理》第79页共79页
1.设凸轮机构中从动件的行程为h,凸轮推程运动角为。试推导当推程从动件的运动规律为余弦加速度运动规律时,从动件位移s与凸轮转角之间的关系应为:。解:设余弦加速度方程为对上式积分得再对上式积分得再由边界条件时,,;时,,;确定出待定常数和积分常数为;;;将上式代入位移表达式得《机械原理》第79页共79页
题56图1.补全题56图不完整的从动件位移、速度和加速度线图,并判断哪些位置有刚性冲击,哪些位置有柔性冲击?解:补全后的从动件位移、速度和加速度线图如上右图所示。在运动的开始时点O,以及、、处加速度有限突变,所以在这些位置有柔性冲击;在和处速度有限突变,加速度无限突变,在理论上将会产生无穷大的惯性力,所以在这些位置有刚性冲击。2.标出题57图中各个凸轮机构在图示位置时的压力角。凸轮为主动件。题57图解:图中各个凸轮机构在图示位置时的压力角如图所示。3.在题58图中,凸轮为主动件,画出凸轮逆时针转过30º时机构的压力角。《机械原理》第79页共79页
题58图解:凸轮逆时针转过30º时机构的压力角如图所示。1.在题59图中凸轮为半径为R的圆盘,凸轮为主动件。(1)写出机构的压力角与凸轮转角之间的关系;(2)讨论如果,应采用什么改进设计的措施?解:(1)、当凸轮转动任意角时,其压力角如图所示。由图中几何关系有所以机构的压力角与凸轮转角之间的关系为题59图(2)、如果,则应减小偏距e,增大圆盘半径R和滚子半径rr。《机械原理》第79页共79页
第10章齿轮机构及其设计1.一对标准安装的渐开线标准直齿圆柱齿轮外啮合传动,已知:a=100mm,z1=20,z2=30,α=20°,da1=88mm。(1)试计算下列几何尺寸:①齿轮的模数m;②两轮的分度圆直径d1,d2;③两轮的齿根圆直径df1,df2;④两轮的基圆直径db1,db2;⑤顶隙C。(2)若安装中心距增至,试问:①上述各值有无变化,如有应为多少?②两轮的节圆半径,和啮合角为多少? 解:(1)几何尺寸计算①模数m:m=2a/(Z1+Z2)=2╳100/(20+30)mm=4mm②齿根圆直径d1,d2:d1=mZ1=4╳20mm=80mmd2=mZ2=4╳30mm=120mm齿根圆直径df1,df2:df1=d1-2hf=[80-2╳4╳(1+0.25)]mm=70mmdf2=d2-2hf=[120-2╳4╳(1+0.25)]mm=110mm(其中:h*a=(da1-d1)/(2m)=1,c*=0.25)基圆直径db1,db2:db1=d1cosα=80╳cos200mm=75.175mmdb2=d2=d2cosα=120╳cos200mm=112.763mm顶隙c:c=c*m=0.25╳4mm=1mm(2)安装中心距增至a=102mm时,则有:上述各值中,只顶隙一项有变化:c=(1+2)mm=3mm《机械原理》第79页共79页
节圆半径,和啮合角=arcos(acosα/a’)=arcos(100×cos200/102)=22.8880=rb1/cos=40.8mm=rb2/cos=61.2mm1.已知一对外啮合渐开线标准直齿圆柱齿轮的参数为:z1=40,z2=60,m=5mm,α=20°,=1,c*=0.25。(1)求这对齿轮标准安装时的重合度,并绘出单齿及双齿啮合区。(2)若将这对齿轮安装得刚好能够连接传动,求这时的啮合角;节圆半径和;两轮齿廓在节圆处的曲率半径和。解:(1)重合度和双齿啮合区αa1=arcos(db1/da1)=arccos(z1cosa/(z1+2ha*))=arcos(40cos200/(40+2*1))=26.490αa2=arcos(db2/da2)=arccos(z2cosa/(z2+2ha*))=arcos(60cos200/(60+2*1))=24.580εa=1/2π[z1(tgaa1-tga)+z2(tgaa2-tga)]=1/2π[40(tg26.490-tg200)+60(tg24.580-tg200)]=1.75(2)能够连续传动时a、 啮合角α/:刚好能够连续传动时,εa=1,则εa=1/2π[z1(tgaa1-tga)+z2(tgaa2-tga)]=1tgα/=(z1tgaa1+z2tga-2π)/(z1+z2)=(40tg26.49+60-tg200-2π)/(40+60)=0.411α/=22.350b、 节圆半径r/1、r/2:r/1=rb1/cosa/=r1cosa/cosa/=mz1cosa/2/cosa/=101.6mmr/2=rb2/cosa/=r1cosa/cosa/=mz2cosa/2/cosa/=152.4mmc、 节圆半径处的曲率半径ρˊ1ρˊ2:ρˊ1=r/1sina/=101.6*sin22.350mm=38.63mmρˊ2=r/2sina/=152.4*sin22.350mm=57.95mm2.某机器上有一对标准安装的外啮合渐开线标准直齿圆柱齿轮机构,已知:z1=20,z2=40,m=4mm,=1。为了提高传动的平稳性,用一对标准斜齿圆柱齿轮来替代,并保持原中心距、模数(法面)、传动比不变,要求螺旋角β<20°。试设计这对斜齿圆柱齿轮的齿数z1,z2和螺旋角β,并计算小齿轮的齿顶圆直径da1和当量齿数zv1。解:1)确定z1、z2、β《机械原理》第79页共79页
得:,(且必须为整数)当,时,,时,,时,由于β<20°,则这对斜齿圆柱齿轮的Z1=19,Z2、=38,β=18.195°2)计算da1和当量齿数Zv11.已知产生渐开线的基圆半径rb=50mm,试求:(1)渐开线在向径rk=65mm处的曲率半径ρk、压力角αk和展角θk;(2)渐开线上展角θk=20°处的压力角αk、向径rk和曲率半径ρk。解:(1)ρk=41.533mm,αk=39.715°,θk=0.1375(弧度);(2)αk≈51°,rk=79.738mmρk=62.113mm2.一对渐开线标准直齿圆柱齿轮,已知:z1=21,z2=61,m=2.5mm,α=200。试求:(1)两轮的齿p1和p2;(2)两轮的基圆齿距pb1和pb2(3)两轮分度圆上渐开线齿廓的曲率半径ρ1和ρ2。 解:(1)p1=p2=7.85mm;(2)pb1=pb2=7.38mm;(3)ρ1=8.98mmρ2=26.08mm3.用范成法滚刀切制参数为z=16、αn=20°、han*=1的斜齿轮,当其β=15°时,是否会产生根切?仍用此滚刀切制齿数z=15的斜齿轮,螺旋角至少应为多少时才能避免根切?解:1)不会根切2)β=16.44°4.已知一对外啮合斜齿圆柱齿轮的参数为:mn=6mm,z1=30,z2=100,试问螺旋角为多少时才能满足标准中心距为400mm?解:β=12.84°《机械原理》第79页共79页
1.一对斜齿圆柱齿轮传动中,已知:z1=20,z2=40,法面模数mn=8mm,αn=20°,螺旋角β=30°,试求:(1)中心距;(2)两轮当量齿数;(3)两轮齿顶圆直径。解:1)2)3)2.已知一对外啮合正常齿制标准直齿圆柱齿轮传动,齿轮1丢失,测出其中心距a=150mm,齿轮2的齿数z2=42和齿顶圆直径da1=140mm,现需配制齿轮1,试确定齿轮1的主要尺寸。3.一对标准斜齿轮传动,已知z1=28,z2=58,法面模数mn=4mm,螺旋角β=10°。试求:(1)两齿轮的齿顶圆直径及中心距;(2)当中心距为180时,如何改变参数来满足这一要求。4.两个压力角均为20°的正常齿制渐开线标准直齿圆柱齿轮,它们的齿数分别为z1=22,z2=77,齿顶圆直径分别为da1=54mm,da2=158mm。问该对齿轮能否正确啮合,为什么?,5.如题71图所示为两对渐开线齿轮的基圆和顶圆,轮1为主动轮。试分别在图上标明:理论啮合线N1N2,实际啮合线B1B2,啮合角,节圆半径、。《机械原理》第79页共79页
题71图 1.已知一对外啮合标准直齿圆柱齿轮传动,其模数m=5mm,α=20º,,z1=19,z2=42。轮1主动,顺时针方向转动,当这对齿轮正确安装时,(1)画出其啮合图,并在图上表明:理论啮合线,开始啮合点,终止啮合点,实际啮合线,啮合角,节点和节圆;(2)两齿轮的分度圆周节和基圆周节(周节=齿距)解:1)2)2.一对渐开线直齿圆柱标准齿轮传动,已知齿数=25,=55,模数=2mm,压力角=200,=1,=0.25。试求:1.齿轮1在分度圆上齿廓的曲率半径;2.齿轮2在齿顶圆上的压力角;3.如果这对齿轮安装后的实际中心距,求啮合角和两齿轮的节圆半径、。《机械原理》第79页共79页
解:1.齿轮1的基圆半径:=23.492mm齿轮1在分度圆上齿廓的曲率半径:=8.55mm2.齿轮2的齿顶圆半径:=27mm齿轮2在齿顶圆上的压力角标准中心距mm啮合角+=81;/=/=55/25=11/5解得:=25.3125mm;=55.6875mm1.在一对标准直齿轮传动中,已知:z1=20,z2=60,m=5mm,α=20°,试求两个齿轮的:①分度圆齿距;②基圆齿距;③基圆半径;④分度圆上齿廓曲率半径。(齿距=周节)2.一对标准渐开线圆柱直齿轮外啮合传动(正常齿),正确安装(齿侧间隙为零)后,中心距为144mm,其齿数为z1=24,z2=120,分度圆上压力角α=200。(1)求齿轮2的模数m2及其在分度圆上的齿厚S2;(2)求轮1的齿顶圆处的压力角αa1;3.已知一对外啮合标准直齿圆柱齿轮,z1=28,,,α=20°,,a=164mm,求:该对齿轮的重合度及实际啮合线长度。解:(1),(2),aa1=arcos(db1/da1)=arccos(z1cosa/(z1+2ha*))=arcos(28cos200/(28+2*1))=28.710aa2=arcos(db2/da2)=arccos(z2cosa/(z2+2ha*))=arcos(54cos200/(54+2*1))=25.020(3)εa=1/2π[z1(tgaa1-tga)+z2(tgaa2-tga)]=1/2π[28(tg28.710-tg200)+54(tg25.020-tg200)]=1.70《机械原理》第79页共79页
(4)1.推证渐开线齿轮法向齿距、基圆齿距和分度圆齿距之间的关系为式为。证明:根据渐开线的性质有,设齿轮的齿数为,模数为,基圆半径为,分度圆半径为,压力角为因为 ,又因为 所以 因为 所以 证毕。2.一个渐开线标准正常直齿圆柱齿轮,齿轮的齿数z=17,压力角,模数m=3mm。试求在齿轮分度圆和齿顶圆上齿廓的曲率半径和压力角。解:如题78图所示,由已知条件得题78图所以在齿轮分度圆上齿廓的压力角和曲率半径分别为在齿轮齿顶圆上齿廓的压力角和曲率半径分别为《机械原理》第79页共79页
1.一对渐开线外啮合标准斜齿圆柱齿轮传动,已知,,,,,,,轮齿宽度。试计算这对齿轮传动的中心距和重合度。解:齿轮传动的中心距为所以最后得重合度为2.一阿基米德蜗杆蜗轮传动,蜗轮的齿数、分度圆直径,蜗杆为单头。确定(1)传动比,其中为蜗杆的转速,为蜗轮的转速;(2)蜗轮端面模数,蜗杆的轴面模数,分度圆直径;(3)蜗杆分度圆升角;《机械原理》第79页共79页
(4)中心距。解:(1)、传动比(2)、蜗轮端面模数根据蜗杆蜗轮传动的正确啮合条件可得蜗杆的轴面模数再根据蜗杆模数与分度圆直径表选取蜗杆的分度圆直径(3)、因为所以蜗杆分度圆升角(4)、中心距第11章齿轮系及其设计1.已知齿轮1的转速n1=120r/min,而z1=40,z2=20,求:(1)z3;(2)行星架的转速nH=0时齿轮3的转速n3(大小及方向)。题81图解:1)求z32)当时,齿轮3的转向与齿轮1的转向相反。《机械原理》第79页共79页
1.已知轮系中z1=60,z2=15,,各轮模数均相同,求z3及i1H。题82图 解:1)由同心条件得:2)齿轮1的转向与行星架H的转向相同。2.求如图所示轮系的传动比i14.,已知,z2=z3=20,zH=100,z4=20。题83图解:1)2)3)齿轮1和齿轮4的转向相反。3.求图示卷扬机减速器的传动比i1H.。若各轮的齿数为z1=24,,z2=48,z3=60,,z4=20,。《机械原理》第79页共79页
题84图解:1)定轴轮系的传动比为:2)差动轮系的转化机构的传动比为:3)由上述两式得:齿轮1与卷扬机筒的转向相同。1.在图示轮系中,已知各齿轮的齿数分别为z1=28,z3=78,z4=24,z6=80,若已知n1=2000r/min。当分别将轮3或轮6刹住时,试求行星架的转速nH。题86图解:1)当轮3被刹住时(a)因得:528.3rpm《机械原理》第79页共79页
2)当轮6被刹住时因得:(b)将(b)式代入(a)式得:867.9prm1.在图示的轮系中,已知各轮齿数为z1=20,z2=25,,z3=20,z4=70,n1=750r/min,顺时针方向,试求nH大小及方向。题87图解:所以的方向与方向相反,为逆时针方向。2.在图示的轮系中,已知各齿轮齿数为,z5=z6=z7=30,z2=z3=40,z4=100,试求传动比i17。《机械原理》第79页共79页
题88图解:1.在图示的轮系中,已知各齿轮齿数为z1=1,z2=40,,z3=72,,z4=114,蜗杆左旋,转向如图示,试求轮系的传动比i1H,并确定输出杆H的转向。题89图解:定轴轮系:周转轮系:复合轮系:的方向如图所示。2.在图示的轮系中,齿轮均是标准齿轮正确安装,轮1顺时针转动,已知各轮齿数为z1=20,z2=25,z4=25,z5=20,试求转动比i1H和Ⅱ轴的转向。《机械原理》第79页共79页
题90图解:先确定齿轮3和6的齿数和:该轮系由1---2---3---4及4---5---6---7两个行星轮系组成:因为正,故7与1转向相同,Ⅱ轴的转向为顺时针方向。1.在图示的轮系中,已知各轮齿数为z1=22,z3=88,z4=z6,试求传动比i16。题91图《机械原理》第79页共79页
解:(a)(b)由式(a)得:(c)(c)式代入式(a),得:1.在图示自行车里程表的机构中,C为车轮轴。已知z1=17,z3=23,z4=19,,z5=24。设轮胎受压变形后使28英寸的车轮有效直径约为0.7m,当车行一公里时,表上的指针P要刚好回转一周,求齿轮2的齿数。题92图解:1)为行星轮系2)1-2为定轴轮系(1)(2)(3)(4)《机械原理》第79页共79页
联立求解得:1.在图示的轮系中,已知各轮齿数为z1=20,z2=34,z3=18,z4=36,z5=78,z6=z7=26,试求转动比i1H题93图解:(a)因为(b)式(b)代入式(a)得:2.在图示的轮系中,已知各轮齿数为z3=z4=25,,各轮的模数相同,n4=1000r/min。试求行星架的转速nH的大小和方向。题94图解:(1)求其余各轮齿数:《机械原理》第79页共79页
所以(2)求(1)(3) 求各转速:由上面三式得:所以:代入上二式得:(4)求:的方向与相反。1.轮系中z1=2,z2=60,z3=25,z4=50,z5=20,z6=30,又已知蜗杆的转速n1=900r/min,nB=6r/min,方向如图。求:n6的大小和方向。题95图《机械原理》第79页共79页
解:1)2)方向与方向相同。1.如图所示轮系中,,,组成轮系的各齿轮模数相同。齿轮和轴线重合,且齿数相同。求轮系传动比。解题要点:区分基本轮系,由齿轮1、2-、3及系杆4组成差动轮系;由齿轮1、2、5及系杆4组成差动轮系;齿轮5、2-、3及系杆4组成差动轮系;由齿轮、6、3组成定轴轮系。其中三个周转轮系并不是独立的,任取两个周转轮系求解,结果是一样的。解:1.求齿数和。因为齿轮1和齿轮5同轴线所以有:由于各齿轮模数相同,则有:题96图因为齿轮3和齿轮5同轴线,所以有:由于各齿轮模数相同,则有2.由齿轮1、2-、3及系杆4组成差动轮系有3.由齿轮1、2、5及系杆4组成差动轮系有4.齿轮、6、3组成定轴轮系,齿轮和轴线重合,且齿数相同有:《机械原理》第79页共79页
(采用画箭头法判别的“+”、“-”号)将式(3)代入式(1):解得将式(4)代入式(2):解得;齿轮5和系杆4转向相反。1.在题97图中,已知蜗杆的转速,,,,,,,,,。(1)写出,,的表达式;方向题97图(2)确定的大小和转向。解:(1)、,方向通过划箭头来确定;;;(2)、因为所以,方向“↑”,如图所示。《机械原理》第79页共79页
题98图1.题98图为一用于自动化照明灯具的轮系,已知,,,,,。(1)轮系属于什么类型的周转轮系;(2)确定箱体的转速和转向。解:(1)、因为所以该周转轮系属于行星轮系。(2)、因为所以最后得箱体的转速为,方向与n1相同。题99图2.计算题99图所示大减速比减速器的传动比。解:因为,所以将代入上式,最后得题100图3.写出题100图中,,之间的关系,设已知各个齿轮的齿数。《机械原理》第79页共79页
解:(a)、(b)、(c)、1.题101图所示为一提升重物装置。蜗杆E为右旋。当卷筒直径为250mm,齿轮A的转速为700r/min时,确定重物上升的速度和齿轮A的正确转向。题101图解:轮系是由定轴轮系(A-B-C-D-E-F-G)和周转轮系(G-K-H-L-M)组成的混合轮系。对定轴轮系(A-B-C-D-E-F-G),有对周转轮系(G-K-H-L-M),有因为,所以所以所以最后得重物上升的速度为齿轮A的正确转向为逆时针方向,如图所示。题102图2.在题102图所示的轮系中,问当齿轮A转动一转时,齿轮L转动几转?两者的转向是否一致?解:《机械原理》第79页共79页
轮系是由定轴轮系(A-B)、(A-D)和周转轮系(E-F-G-H-J-K-L-M)组成的混合轮系。对定轴轮系(A-B),有因为,所以对定轴轮系(A-D),有因为,所以对周转轮系(E-F-G-H-J-K-L-M),有将,代入上式,最后得即,当齿轮A转动一转时,齿轮L转动0.34转,转向与齿轮A相反。题103图1.题103图中,,为轮系的输入运动,C为轮系的运动输出构件。已知确定转速的大小和转向。解:(a)、轮系是由定轴轮系(1-2)和周转轮系(2-3-4-4’-5)组成的混合轮系。对定轴轮系(1-2),有《机械原理》第79页共79页
即对周转轮系(2-3-4-4’-5),有将,,代入上式,最后得,方向“↓”,如图所示。(b)、轮系是由定轴轮系(4-5-6)和周转轮系(1-2-2’-3-4)组成的混合轮系。对定轴轮系(4-5-6),有即对周转轮系(1-2-2’-3-4),有将,,代入上式,最后得,方向“↓”,如图所示。《机械原理》第79页共79页'
您可能关注的文档
- 》第四版[1]._高鸿宾版_课后练习答案(新).doc
- 》第四版[1]._高鸿宾版_课后练习答案.doc
- 》第四版_习题答案_高等教育出版社[1].doc
- 《期货投资分析》习题集附答案.doc
- 《机械制图》习题集整理(答案和题目已分开).doc
- 《机械制图习题集》(第四版)N2(一)答案.pdf
- 《机械制造工艺学》试题库及答案.doc
- 《机械制造技术基础》习题与解答.doc
- 《机械制造技术基础》复习题(含答案).doc
- 《机械原理》第七版西北工业大学习题答案(特别全答案详解).pdf
- 《机械工程控制基础》课后答案.doc
- 《机械工程控制基础》课后题答案.doc
- 答案_北京理工大学出版社_修改.pdf
- 《机械设计》期末考试试题库含答案详解8套.doc
- 《机械设计基础》典型试题及答案(10套).doc
- 《机械设计基础》杨可桢 习题答案1-18章.docx
- 《机械设计基础》杨晓兰版(机械工业出版社)课后习题答案.doc
- 《机械设计基础》试题库及答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明