

- 764.50 KB
- 2022-04-22 11:22:09 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
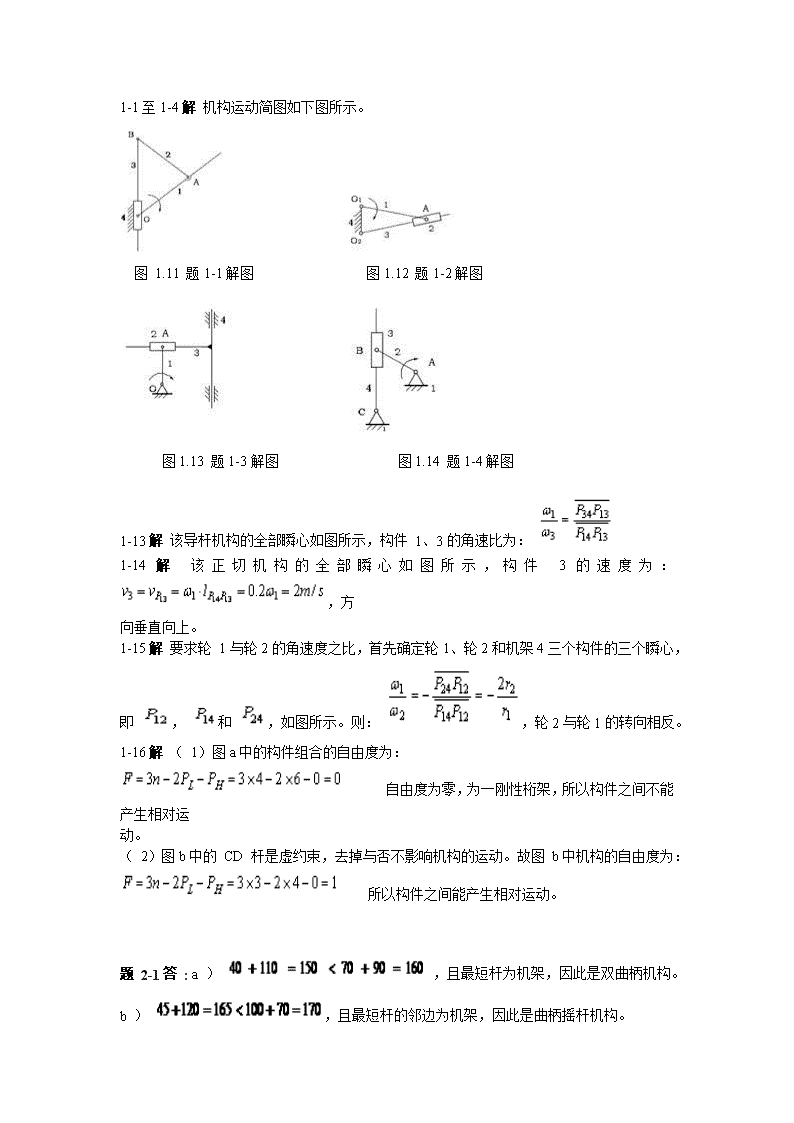
'1-1至1-4解机构运动简图如下图所示。 图1.11题1-1解图 图1.12题1-2解图 图1.13题1-3解图 图1.14题1-4解图 1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。则:,轮2与轮1的转向相反。1-16解(1)图a中的构件组合的自由度为: 自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。(2)图b中的CD杆是虚约束,去掉与否不影响机构的运动。故图b中机构的自由度为: 所以构件之间能产生相对运动。题2-1答:a),且最短杆为机架,因此是双曲柄机构。b),且最短杆的邻边为机架,因此是曲柄摇杆机构。
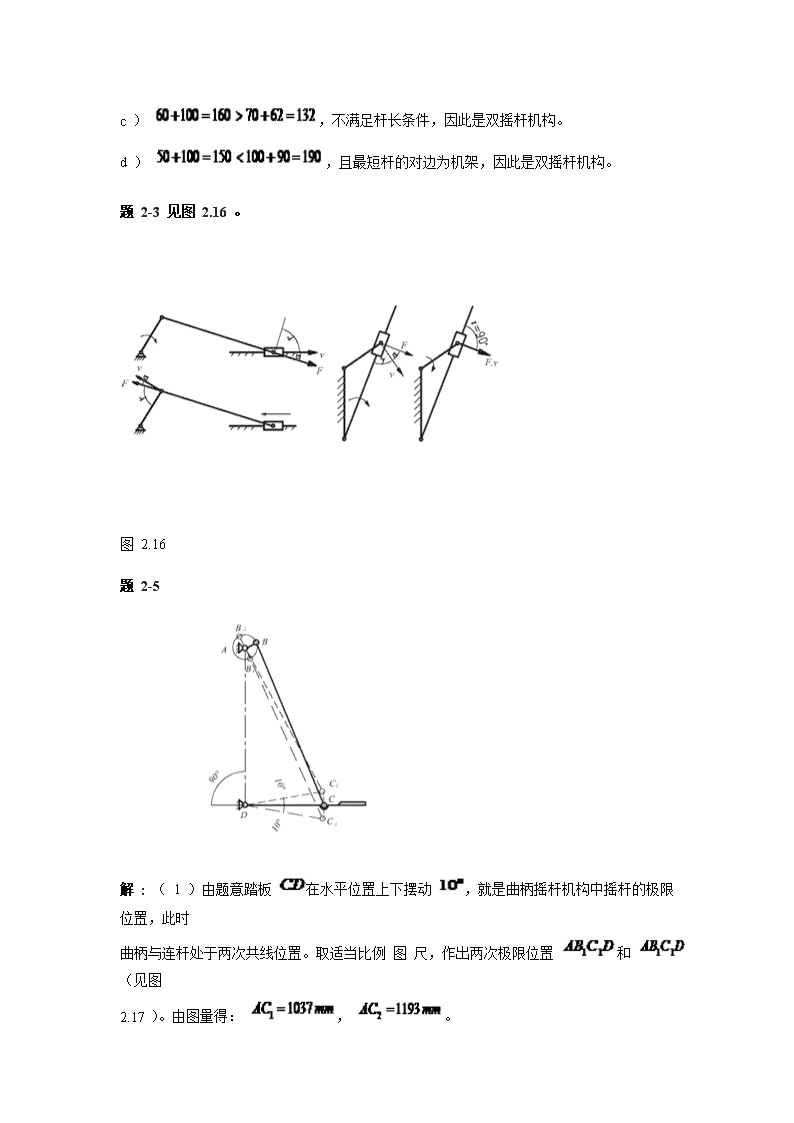
c),不满足杆长条件,因此是双摇杆机构。d),且最短杆的对边为机架,因此是双摇杆机构。题2-3见图2.16。图2.16 题2-5解:(1)由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。取适当比例图尺,作出两次极限位置和(见图2.17)。由图量得:,。
解得:由已知和上步求解可知:,,,(2)因最小传动角位于曲柄与机架两次共线位置,因此取和代入公式(2-3)计算可得:或:代入公式(2-3)′,可知题2-6解:因为本题属于设计题,只要步骤正确,答案不唯一。这里给出基本的作图步骤,不给出具体数值答案。作图步骤如下(见图2.18):(1)求,;并确定比例尺。(2)作,。(即摇杆的两极限位置)(3)以为底作直角三角形,,。(4)作的外接圆,在圆上取点即可。在图上量取,和机架长度。则曲柄长度,摇杆长度
。在得到具体各杆数据之后,代入公式(2—3)和(2-3)′求最小传动角,能满足即可。图2.18题2-8解:见图2.20,作图步骤如下:(1)。(2)取,选定,作和,。(3)定另一机架位置:角平分线,。(4),。杆即是曲柄,由图量得曲柄长度:3-1解
图3.10题3-1解图如图3.10所示,以O为圆心作圆并与导路相切,此即为偏距圆。过B点作偏距圆的下切线,此线为凸轮与从动件在B点接触时,导路的方向线。推程运动角如图所示。3-2解图3.12题3-2解图如图3.12所示,以O为圆心作圆并与导路相切,此即为偏距圆。过D点作偏距圆的下切线,此线为凸轮与从动件在D点接触时,导路的方向线。凸轮与从动件在D点接触时的压力角如图所示。3-4解:图3-14题3-4图根据3-3题解作图如图3-15所示。根据(3.1)式可知,取最大,同时s2
取最小时,凸轮机构的压力角最大。从图3-15可知,这点可能在推程段的开始处或在推程的中点处。由图量得在推程的开始处凸轮机构的压力角最大,此时<[]=30°。 图3-15题3-4解图 3-6解:图3-18题3-6图从动件在推程及回程段运动规律的角位移方程为:1.推程: 0°≤≤150°2.回程: 0°≤≤120°计算各分点的位移值如下:总转角(°)0153045607590105角位移(°)00.3671.4323.0925.1827.59.81811.908
总转角(°)120135150165180195210225角位移(°)13.56814.63315151514.42912.8030.370总转角(°)240255270285300315330345角位移(°)7.54.6302.1970.5710000根据上表作图如下:图3-19题3-6解图4.5课后习题详解4-1解 分度圆直径 齿顶高 齿根高 顶隙
中心距 齿顶圆直径 齿根圆直径 基圆直径 齿距 齿厚、齿槽宽 4-2解由 可得模数 分度圆直径 4-4解 分度圆半径 分度圆上渐开线齿廓的曲率半径 分度圆上渐开线齿廓的压力角 基圆半径 基圆上渐开线齿廓的曲率半径为0; 压力角为。 齿顶圆半径 齿顶圆上渐开线齿廓的曲率半径 齿顶圆上渐开线齿廓的压力角
4-5解 正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径: 基圆直径 假定则解得 故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。4-11解 因 螺旋角 端面模数 端面压力角 当量齿数 分度圆直径 齿顶圆直径 齿根圆直径 4-12解(1)若采用标准直齿圆柱齿轮,则标准中心距应
说明采用标准直齿圆柱齿轮传动时,实际中心距大于标准中心距,齿轮传动有齿侧间隙,传动不连续、传动精度低,产生振动和噪声。(2)采用标准斜齿圆柱齿轮传动时,因 螺旋角 分度圆直径 节圆与分度圆重合 ,4-13解 分度圆锥角 分度圆直径 齿顶圆直径 齿根圆直径 外锥距 齿顶角、齿根角
顶锥角 根锥角 当量齿数 4-14答:一对直齿圆柱齿轮正确啮合的条件是:两齿轮的模数和压力角必须分别相等,即、。 一对斜齿圆柱齿轮正确啮合的条件是:两齿轮的模数和压力角分别相等,螺旋角大小相等、方向相反(外啮合),即、、。 一对直齿圆锥齿轮正确啮合的条件是:两齿轮的大端模数和压力角分别相等,即、。5-1解:蜗轮2和蜗轮3的转向如图粗箭头所示,即和。 图5.5 图5.6
5-2解:这是一个定轴轮系,依题意有: 齿条6的线速度和齿轮5′分度圆上的线速度相等;而齿轮5′的转速和齿轮5的转速相等,因此有:通过箭头法判断得到齿轮5′的转向顺时针,齿条6方向水平向右。5-3解:秒针到分针的传递路线为:6→5→4→3,齿轮3上带着分针,齿轮6上带着秒针,因此有:。分针到时针的传递路线为:9→10→11→12,齿轮9上带着分针,齿轮12上带着时针,因此有:。
图5.7 图5.85-4解:从图上分析这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2为行星轮,构件为行星架。则有:∵∴∴当手柄转过,即时,转盘转过的角度,方向与手柄方向相同。5-5解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,构件为行星架。则有:
∵,∴∴传动比为10,构件与的转向相同。图5.9 图5.10 5-8解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵,∴∴与方向相同5-9解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。∵设齿轮1方向为正,则,∴∴与方向相同
图5.13 图5.145-10解:这是一个混合轮系。其中齿轮1、2、2′3、组成周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。而齿轮4和行星架组成定轴轮系。在周转轮系中:(1)在定轴轮系中:(2)又因为:(3)联立(1)、(2)、(3)式可得:5-14解:这是一个混合轮系。齿轮3、4、4′、5和行星架组成周转轮系,其中齿轮3、5为中心轮,齿轮4、4′为行星轮。齿轮1、2组成定轴轮系。在周转轮系中:(1)
在定轴轮系中:(2)又因为:,,(3)依题意,指针转一圈即(4)此时轮子走了一公里,即(5)联立(1)、(2)、(3)、(4)、(5)可求得图5.18 图5.195-15解:这个起重机系统可以分解为3个轮系:由齿轮3′、4组成的定轴轮系;由蜗轮蜗杆1′和5组成的定轴轮系;以及由齿轮1、2、2′、3和构件组成的周转轮系,其中齿轮1、3是中心轮,齿轮4、2′为行星轮,构件是行星架。一般工作情况时由于蜗杆5不动,因此蜗轮也不动,即(1)
在周转轮系中:(2)在定轴齿轮轮系中:(3)又因为:,,(4)联立式(1)、(2)、(3)、(4)可解得:。当慢速吊重时,电机刹住,即,此时是平面定轴轮系,故有:6-1解 顶圆直径 齿高 齿顶厚 齿槽夹角 棘爪长度
图6.1题6-1解图6-2解 拔盘转每转时间 槽轮机构的运动特性系数 槽轮的运动时间 槽轮的静止时间 6-3解槽轮机构的运动特性系数 因: 所以 7-1解:(1)先求解该图功的比例尺。(2)求最大盈亏功。根据图7.5做能量指示图。将和曲线的交点标注,,,,,,,,。将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.6)如下:首先自向上做,表示区间的盈功;其次作向下表示区间的亏功;依次类推,直到画完最后一个封闭
矢量。由图知该机械系统在区间出现最大盈亏功,其绝对值为:(3)求飞轮的转动惯量曲轴的平均角速度:;系统的运转不均匀系数:;则飞轮的转动惯量:图7.5 图7.67-2
图7.7 图7.8解:(1)驱动力矩。因为给定为常数,因此为一水平直线。在一个运动循环中,驱动力矩所作的功为,它相当于一个运动循环所作的功,即:因此求得:(2)求最大盈亏功。根据图7.7做能量指示图。将和曲线的交点标注,
,,。将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.8)如下:首先自向上做,表示区间的盈功;其次作向下表示区间的亏功;然后作向上表示区间的盈功,至此应形成一个封闭区间。由图知该机械系统在区间出现最大盈亏功。欲求,先求图7.7中的长度。如图将图中线1和线2延长交于点,那么在中,相当于该三角形的中位线,可知。又在中,,因此有:,则根据所求数据作出能量指示图,见图7.8,可知最大盈亏功出现在段,则。(3)求飞轮的转动惯量和质量。
7-7解:图7.10 图7.11由图见一个运动循环的力矩图有四个重复图示,因此,可以以一个周期只有来计算。(1)求驱动力矩。一个周期内驱动力矩功和阻力矩功相等,又依题意驱动力矩为常数,故有,(2)求最大盈亏功。根据图7.10做能量指示图。将和曲线的交点标注,,,。将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.11)如下:首先自向上做,表示区间的盈功,
;其次作向下表示区间的亏功,;然后作向上表示区间的盈功,至此应形成一个封闭区间,。由图知该机械系统在区间出现最大盈亏功。(3)求飞轮的转动惯量。(4)求飞轮的质量。由课本公式7-8: 得: 8-1解:依题意该转子的离心力大小为该转子本身的重量为则,即该转子的离心力是其本身重量的倍。8-5
图8.9解:先求出各不平衡质径积的大小:方向沿着各自的向径指向外面。用作图法求解,取,作图8.9所示。由静平衡条件得:由图8.9量得,方向与水平夹角为。8-8
图8.14解:先把不平衡质量在两平衡基面和上分解。基面: 基面: 则在两个基面上的质径积分别为:基面:
图8.15基面: 用作图法求解,取,作图8.15(a)(b)所示。由动平衡条件得:和由图上量取:,方向如图8.15(a)(b)所示。校核。设坐标轴方向如图8.15所示,用解析法校核。基面:
向有: 向有: 基面:向有: 向有: 两个平面在向和向合力均为零,因此所得结果正确。由于回转半径为,因此所加的平衡质量应为'
您可能关注的文档
- 机械振动基础(李晓雷等)课后习题答案.doc
- 机械振动基础课后习题答案.doc
- 机械控制工程基础第四章习题解答.doc
- 机械设计(第八版)课后习题答案(最新).doc
- 机械设计(第八版)课后习题答案(细心整理最全系列)(3、5~7章).doc
- 机械设计(第八版)课后习题答案— 1-15章.doc
- 机械设计作业集答案 第四版 西北工大版.doc
- 机械设计基础(第五版)课后习题答案(只有专升本要求章节).doc
- 机械设计基础-习题解答.doc
- 基础_第2版_朱龙英主编课后习题部分答案(有些题号是错误的).doc
- 机械设计基础习题及答案.doc
- 机械设计基础习题集(附解答).pdf
- 机械设计基础所有的答案.doc
- 机械设计基础考试试题及答案.doc
- 机械设计基础课后习题答案(第四版)陈立德 罗卫平.doc
- 机械设计基础部分习题及答案.doc
- 机械设计复习题.doc
- 机械设计第九版 濮良贵 课后习题答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明