

- 973.00 KB
- 2022-04-22 11:22:19 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
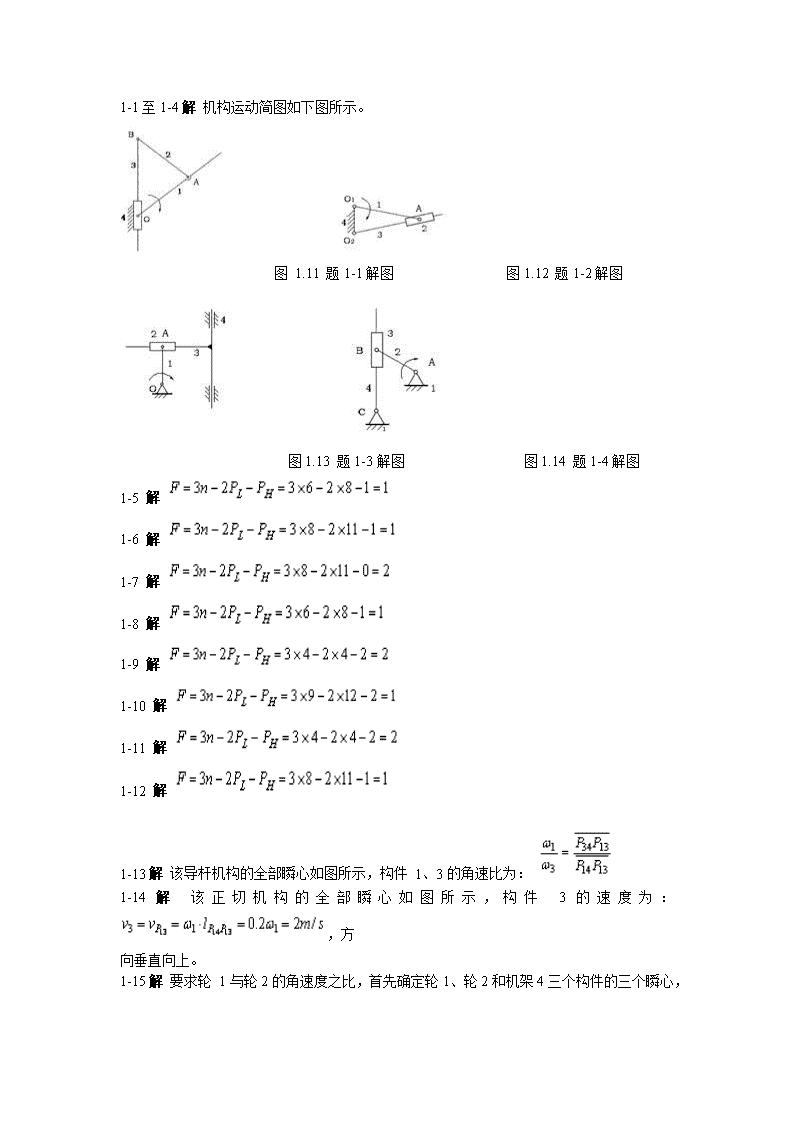
'1-1至1-4解机构运动简图如下图所示。 图1.11题1-1解图 图1.12题1-2解图 图1.13题1-3解图 图1.14题1-4解图1-5解1-6解1-7解1-8解1-9解1-10解1-11解1-12解 1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。1-15解要求轮
1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。则:,轮2与轮1的转向相反。1-16解(1)图a中的构件组合的自由度为: 自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。(2)图b中的CD杆是虚约束,去掉与否不影响机构的运动。故图b中机构的自由度为: 所以构件之间能产生相对运动。题2-1答:a),且最短杆为机架,因此是双曲柄机构。b),且最短杆的邻边为机架,因此是曲柄摇杆机构。c),不满足杆长条件,因此是双摇杆机构。d),且最短杆的对边为机架,因此是双摇杆机构。题2-2解:要想成为转动导杆机构,则要求与均为周转副。(1)当为周转副时,要求能通过两次与机架共线的位置。见图2-15中位置和。在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。综合这二者,要求即可。(2)当为周转副时,要求能通过两次与机架共线的位置。见图2-15中位置和。在位置时,从线段来看,要能绕过点要求:
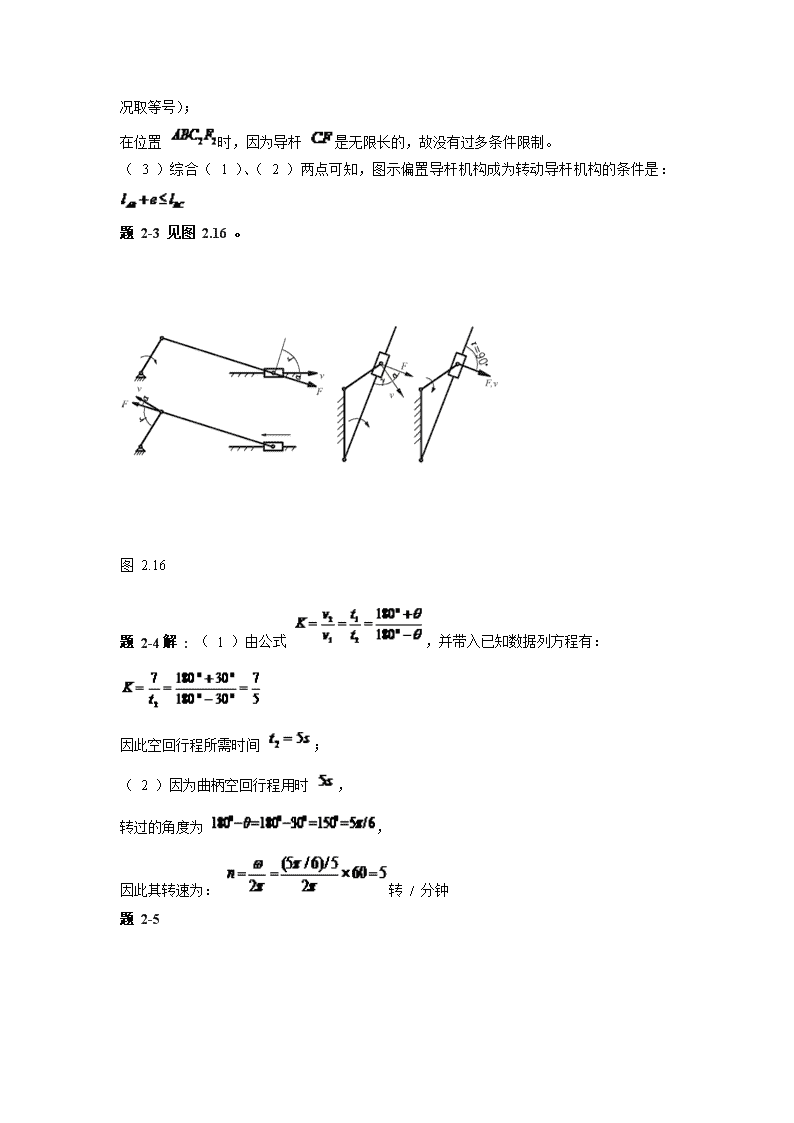
(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。(3)综合(1)、(2)两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3见图2.16。图2.16 题2-4解:(1)由公式,并带入已知数据列方程有:因此空回行程所需时间;(2)因为曲柄空回行程用时,转过的角度为,因此其转速为:转/分钟题2-5
解:(1)由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。取适当比例图尺,作出两次极限位置和(见图2.17)。由图量得:,。解得:由已知和上步求解可知:,,,(2)因最小传动角位于曲柄与机架两次共线位置,因此取和代入公式(2-3)计算可得:或:
代入公式(2-3)′,可知题2-6解:因为本题属于设计题,只要步骤正确,答案不唯一。这里给出基本的作图步骤,不给出具体数值答案。作图步骤如下(见图2.18):(1)求,;并确定比例尺。(2)作,。(即摇杆的两极限位置)(3)以为底作直角三角形,,。(4)作的外接圆,在圆上取点即可。在图上量取,和机架长度。则曲柄长度,摇杆长度。在得到具体各杆数据之后,代入公式(2—3)和(2-3)′求最小传动角,能满足即可。图2.18题2-7
图2.19 解:作图步骤如下(见图2.19):(1)求,;并确定比例尺。(2)作,顶角,。(3)作的外接圆,则圆周上任一点都可能成为曲柄中心。(4)作一水平线,于相距,交圆周于点。(5)由图量得,。解得:曲柄长度:连杆长度:题2-8解:见图2.20,作图步骤如下:(1)。(2)取,选定,作和,。(3)定另一机架位置:角平分线,。
(4),。杆即是曲柄,由图量得曲柄长度:题2-9解:见图2.21,作图步骤如下:(1)求,,由此可知该机构没有急回特性。(2)选定比例尺,作,。(即摇杆的两极限位置)(3)做,与交于点。(4)在图上量取,和机架长度。曲柄长度:连杆长度:题2-10解:见图2.22。这是已知两个活动铰链两对位置设计四杆机构,可以用圆心法。连接,,作图2.22的中垂线与交于点。然后连接,,作的中垂线与交于点。图中画出了一个位置。从图中量取各杆的长度,得到:,,题2-11解:(1)以为中心,设连架杆长度为,根据作出,,。(2)取连杆长度,以,,为圆心,作弧。(3)另作以点为中心,、,的另一连架杆的几个位置,并作出不同半径的许多同心圆弧。(4)进行试凑,最后得到结果如下:,,,。
机构运动简图如图2.23。题2-12解:将已知条件代入公式(2-10)可得到方程组:联立求解得到:,,。将该解代入公式(2-8)求解得到:,,,。又因为实际,因此每个杆件应放大的比例尺为:,故每个杆件的实际长度是:,,,。题2-13证明:见图2.25。在上任取一点,下面求证点的运动轨迹为一椭圆。见图可知点将分为两部分,其中,。
又由图可知,,二式平方相加得可见点的运动轨迹为一椭圆。3-1解 图3.10题3-1解图如图3.10所示,以O为圆心作圆并与导路相切,此即为偏距圆。过B点作偏距圆的下切线,此线为凸轮与从动件在B点接触时,导路的方向线。推程运动角如图所示。3-2解图3.12题3-2解图如图3.12所示,以O为圆心作圆并与导路相切,此即为偏距圆。过D点作偏距圆的下切线,此线为凸轮与从动件在D点接触时,导路的方向线。凸轮与从动件在D点接触时的压力角如图所示。
3-3解:从动件在推程及回程段运动规律的位移、速度以及加速度方程分别为:(1)推程: 0°≤≤150°(2)回程:等加速段 0°≤≤60°等减速段 60°≤≤120°为了计算从动件速度和加速度,设。计算各分点的位移、速度以及加速度值如下:总转角0°15°30°45°60°75°90°105°位移(mm)00.7342.8656.18310.3651519.63523.817速度(mm/s)019.41636.93150.83259.75762.83259.75750.832加速度(mm/s2)65.79762.57753.23138.67520.3330-20.333-38.675总转角120°135°150°165°180°195°210°225°位移(mm)27.13529.26630303029.06626.25021.563速度(mm/s)36.93219.416000-25-50-75加速度(mm/s2)-53.231-62.577-65.7970-83.333-83.333-83.333-83.333总转角240°255°270°285°300°315°330°345°位移(mm)158.4383.750.9380000
速度(mm/s)-100-75-50-250000加速度(mm/s2)-83.333-83.33383.33383.33383.333000根据上表作图如下(注:为了图形大小协调,将位移曲线沿纵轴放大了5倍。): 图3-13题3-3解图3-4解:图3-14题3-4图根据3-3题解作图如图3-15所示。根据(3.1)式可知,取最大,同时s2取最小时,凸轮机构的压力角最大。从图3-15可知,这点可能在推程段的开始处或在推程的中点处。由图量得在推程的开始处凸轮机构的压力角最大,此时<[]=30°。
图3-15题3-4解图 3-5解:(1)计算从动件的位移并对凸轮转角求导 当凸轮转角在0≤≤过程中,从动件按简谐运动规律上升h=30mm。根据教材(3-7)式可得: 0≤≤ 0≤≤ 当凸轮转角在≤≤过程中,从动件远休。S2=50 ≤≤ ≤≤ 当凸轮转角在≤≤过程中,从动件按等加速度运动规律下降到升程的一半。根据教材(3-5)式可得:
≤≤ ≤≤ 当凸轮转角在≤≤过程中,从动件按等减速度运动规律下降到起始位置。根据教材(3-6)式可得: ≤≤ ≤≤ 当凸轮转角在≤≤过程中,从动件近休。S2=50 ≤≤ ≤≤ (2)计算凸轮的理论轮廓和实际轮廓 本题的计算简图及坐标系如图3-16所示,由图可知,凸轮理论轮廓上B点(即滚子中心)的直角坐标为图3-16
式中。 由图3-16可知,凸轮实际轮廓的方程即B′点的坐标方程式为因为所以故 由上述公式可得理论轮廓曲线和实际轮廓的直角坐标,计算结果如下表,凸轮廓线如图3-17所示。x′y′x′y′0°49.3018.333180°-79.223-8.88510°47.42116.843190°-76.070-22.42120°44.66825.185200°-69.858-34.84030°40.94333.381210°-60.965-45.36940°36.08941.370220°-49.964-53.35650°29.93448.985230°-37.588-58.31260°22.34755.943240°-24.684-59.94970°13.28461.868250°-12.409-59.00280°2.82966.326260°-1.394-56.56690°-8.77868.871270°8.392-53.041
100°-21.13969.110280°17.074-48.740110°-33.71466.760290°24.833-43.870120°-45.86261.695300°31.867-38.529130°-56.89553.985310°38.074-32.410140°-66.15143.904320°43.123-25.306150°-73.05231.917330°46.862-17.433160°-77.48418.746340°49.178-9.031170°-79.5625.007350°49.999-0.354180°-79.223-8.885360°49.3018.333 图3-17题3-5解图3-6解:图3-18题3-6图从动件在推程及回程段运动规律的角位移方程为:1.推程: 0°≤≤150°2.回程: 0°≤≤120°计算各分点的位移值如下:总转角(°)0153045607590105
角位移(°)00.3671.4323.0925.1827.59.81811.908总转角(°)120135150165180195210225角位移(°)13.56814.63315151514.42912.8030.370总转角(°)240255270285300315330345角位移(°)7.54.6302.1970.5710000根据上表作图如下:图3-19题3-6解图3-7解:从动件在推程及回程段运动规律的位移方程为:1.推程: 0°≤≤120°2.回程: 0°≤≤120° 计算各分点的位移值如下:总转角(°)0153045607590105位移(mm)00.7612.9296.1731013.82717.07119.239总转角(°)120135150165180195210225位移(mm)20202019.23917.07113.827106.173总转角(°)240255270285300315330345位移(mm)2.9290.761000000
图3-20题3-7解图4.5课后习题详解4-1解 分度圆直径 齿顶高 齿根高 顶隙 中心距 齿顶圆直径
齿根圆直径 基圆直径 齿距 齿厚、齿槽宽 4-2解由 可得模数 分度圆直径 4-3解由 得4-4解 分度圆半径 分度圆上渐开线齿廓的曲率半径 分度圆上渐开线齿廓的压力角 基圆半径 基圆上渐开线齿廓的曲率半径为0; 压力角为。 齿顶圆半径 齿顶圆上渐开线齿廓的曲率半径 齿顶圆上渐开线齿廓的压力角4-5解 正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:
基圆直径 假定则解得 故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。4-6解 中心距 内齿轮分度圆直径 内齿轮齿顶圆直径 内齿轮齿根圆直径 4-7证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。此时有关系:正常齿制标准齿轮 、,代入上式短齿制标准齿轮、,代入上式图4.7题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段
即为渐开线的法线。根据渐开线的特性:渐开线的法线必与基圆相切,切点为。 再根据渐开线的特性:发生线沿基圆滚过的长度,等于基圆上被滚过的弧长,可知:AC 对于任一渐开线齿轮,基圆齿厚与基圆齿距均为定值,卡尺的位置不影响测量结果。 图4.8题4-8图 图4.9题4-8解图4-9解模数相等、压力角相等的两个齿轮,分度圆齿厚相等。但是齿数多的齿轮分度圆直径大,所以基圆直径就大。根据渐开线的性质,渐开线的形状取决于基圆的大小,基圆小,则渐开线曲率大,基圆大,则渐开线越趋于平直。因此,齿数多的齿轮与齿数少的齿轮相比,齿顶圆齿厚和齿根圆齿厚均为大值。4-10解切制变位齿轮与切制标准齿轮用同一把刀具,只是刀具的位置不同。因此,它们的模数、压力角、齿距均分别与刀具相同,从而变位齿轮与标准齿轮的分度圆直径和基圆直径也相同。故参数、、、不变。 变位齿轮分度圆不变,但正变位齿轮的齿顶圆和齿根圆增大,且齿厚增大、齿槽宽变窄。因此、、变大,变小。 啮合角与节圆直径是一对齿轮啮合传动的范畴。4-11解 因 螺旋角 端面模数
端面压力角 当量齿数 分度圆直径 齿顶圆直径 齿根圆直径 4-12解(1)若采用标准直齿圆柱齿轮,则标准中心距应 说明采用标准直齿圆柱齿轮传动时,实际中心距大于标准中心距,齿轮传动有齿侧间隙,传动不连续、传动精度低,产生振动和噪声。(2)采用标准斜齿圆柱齿轮传动时,因 螺旋角 分度圆直径 节圆与分度圆重合 ,
4-13解 4-14解 分度圆锥角 分度圆直径 齿顶圆直径 齿根圆直径 外锥距 齿顶角、齿根角 顶锥角 根锥角 当量齿数 4-15答:一对直齿圆柱齿轮正确啮合的条件是:两齿轮的模数和压力角必须分别相等,即
、。 一对斜齿圆柱齿轮正确啮合的条件是:两齿轮的模数和压力角分别相等,螺旋角大小相等、方向相反(外啮合),即、、。 一对直齿圆锥齿轮正确啮合的条件是:两齿轮的大端模数和压力角分别相等,即、。5-1解:蜗轮2和蜗轮3的转向如图粗箭头所示,即和。 图5.5 图5.65-2解:这是一个定轴轮系,依题意有: 齿条6的线速度和齿轮5′分度圆上的线速度相等;而齿轮5′的转速和齿轮5的转速相等,因此有:
通过箭头法判断得到齿轮5′的转向顺时针,齿条6方向水平向右。5-3解:秒针到分针的传递路线为:6→5→4→3,齿轮3上带着分针,齿轮6上带着秒针,因此有:分针到时针的传递路线为:9→10→11→12,齿轮9上带着分针,齿轮12上带着时针,因此有:。图5.7 图5.85-4解:从图上分析这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2为行星轮,构件为行星架。则有:∵
∴∴当手柄转过,即时,转盘转过的角度,方向与手柄方向相同。5-5解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,构件为行星架。则有:∵,∴∴传动比为10,构件与的转向相同。
图5.9 图5.105-6解:这是一个周转轮系,其中齿轮1为中心轮,齿轮2为行星轮,构件为行星架。则有:∵,,∵∴
∴5-7解:这是由四组完全一样的周转轮系组成的轮系,因此只需要计算一组即可。取其中一组作分析,齿轮4、3为中心轮,齿轮2为行星轮,构件1为行星架。这里行星轮2是惰轮,因此它的齿数与传动比大小无关,可以自由选取。(1)由图知(2)又挖叉固定在齿轮上,要使其始终保持一定的方向应有:(3)联立(1)、(2)、(3)式得: 图5.11 图5.125-8解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵,∴∴与方向相同5-9解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。∵设齿轮1方向为正,则,∴∴与方向相同图5.13 图5.14
5-10解:这是一个混合轮系。其中齿轮1、2、2′3、组成周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。而齿轮4和行星架组成定轴轮系。在周转轮系中:(1)在定轴轮系中:(2)又因为:(3)联立(1)、(2)、(3)式可得:5-11解:这是一个混合轮系。其中齿轮4、5、6、7和由齿轮3引出的杆件组成周转轮系,其中齿轮4、7为中心轮,齿轮5、6为行星轮,齿轮3引出的杆件为行星架。而齿轮1、2、3组成定轴轮系。在周转轮系中:(1)在定轴轮系中:(2)又因为:,联立(1)、(2)、(3)式可得:(1)当,时,
,的转向与齿轮1和4的转向相同。(2)当时,(3)当,时,,的转向与齿轮1和4的转向相反。图5.15 图5.165-12解:这是一个混合轮系。其中齿轮4、5、6和构件组成周转轮系,其中齿轮4、6为中心轮,齿轮5为行星轮,是行星架。齿轮1、2、3组成定轴轮系。在周转轮系中:(1)在定轴轮系中:(2)又因为:,(3)联立(1)、(2)、(3)式可得:即齿轮1和构件的转向相反。
5-13解:这是一个混合轮系。齿轮1、2、3、4组成周转轮系,其中齿轮1、3为中心轮,齿轮2为行星轮,齿轮4是行星架。齿轮4、5组成定轴轮系。在周转轮系中:,∴(1)在图5.17中,当车身绕瞬时回转中心转动时,左右两轮走过的弧长与它们至点的距离成正比,即:(2)联立(1)、(2)两式得到:,(3)在定轴轮系中:则当:时,代入(3)式,可知汽车左右轮子的速度分别为,5-14解:这是一个混合轮系。齿轮3、4、4′、5和行星架组成周转轮系,其中齿轮3、5为中心轮,齿轮4、4′为行星轮。齿轮1、2组成定轴轮系。在周转轮系中:(1)在定轴轮系中:(2)
又因为:,,(3)依题意,指针转一圈即(4)此时轮子走了一公里,即(5)联立(1)、(2)、(3)、(4)、(5)可求得图5.18 图5.195-15解:这个起重机系统可以分解为3个轮系:由齿轮3′、4组成的定轴轮系;由蜗轮蜗杆1′和5组成的定轴轮系;以及由齿轮1、2、2′、3和构件组成的周转轮系,其中齿轮1、3是中心轮,齿轮4、2′为行星轮,构件是行星架。一般工作情况时由于蜗杆5不动,因此蜗轮也不动,即(1)在周转轮系中:(2)
在定轴齿轮轮系中:(3)又因为:,,(4)联立式(1)、(2)、(3)、(4)可解得:。当慢速吊重时,电机刹住,即,此时是平面定轴轮系,故有:5-16解:由几何关系有:又因为相啮合的齿轮模数要相等,因此有上式可以得到:故行星轮的齿数:图5.20 图5.215-17解:欲采用图示的大传动比行星齿轮,则应有下面关系成立:(1)(2)
(3)又因为齿轮1与齿轮3共轴线,设齿轮1、2的模数为,齿轮2′、3的模数为,则有:(4)联立(1)、(2)、(3)、(4)式可得(5)当时,(5)式可取得最大值1.0606;当时,(5)式接近1,但不可能取到1。因此的取值范围是(1,1.06)。而标准直齿圆柱齿轮的模数比是大于1.07的,因此,图示的大传动比行星齿轮不可能两对都采用直齿标准齿轮传动,至少有一对是采用变位齿轮。5-18解:这个轮系由几个部分组成,蜗轮蜗杆1、2组成一个定轴轮系;蜗轮蜗杆5、4′组成一个定轴轮系;齿轮1′、5′组成一个定轴轮系,齿轮4、3、3′、2′组成周转轮系,其中齿轮2′、4是中心轮,齿轮3、3′为行星轮,构件是行星架。在周转轮系中:(1)在蜗轮蜗杆1、2中:(2)
在蜗轮蜗杆5、4′中:(3)在齿轮1′、5′中:(4)又因为:,,,(5)联立式(1)、(2)、(3)、(4)、(5)式可解得:,即。5-19解:这个轮系由几个部分组成,齿轮1、2、5′、组成一个周转轮系,齿轮1、2、2′、3、组成周转轮系,齿轮3′、4、5组成定轴轮系。 在齿轮1、2、5′、组成的周转轮系中: 由几何条件分析得到:,则(1) 在齿轮1、2、2′、3、组成的周转轮系中: 由几何条件分析得到:,则(2) 在齿轮3′、4、5组成的定轴轮系中:(3)
又因为:,(4)联立式(1)、(2)、(3)、(4)式可解得:6-1解 顶圆直径 齿高 齿顶厚 齿槽夹角 棘爪长度 图6.1题6-1解图6-2解 拔盘转每转时间 槽轮机构的运动特性系数 槽轮的运动时间
槽轮的静止时间 6-3解槽轮机构的运动特性系数 因: 所以 6-4解要保证则槽轮机构的运动特性系数应为 因 得 ,则槽数和拔盘的圆销数之间的关系应为: 由此得当取槽数~8时,满足运动时间等于停歇时间的组合只有一种:,。6-5解:机构类型工作特点结构、运动及动力性能适用场合棘轮机构摇杆的往复摆动变成棘轮的单向间歇转动结构简单、加工方便,运动可靠,但冲击、噪音大,运动精度低适用于低速、转角不大场合,如转位、分度以及超越等。槽轮机构拨盘的连续转动变成槽轮的间歇转动结构简单,效率高,传动较平稳,但有柔性冲击用于转速不高的轻工机械中不完全齿轮机构从动轮的运动时间和静止时间的比例可在较大范围内变化需专用设备加工,有较大冲击用于具有特殊要求的专用机械中凸轮式间歇运动机构只要适当设计出凸轮的轮廓,就能获得预期的运动规律。运转平稳、定位精度高,动荷小,但结构较复杂可用于载荷较大的场合
'
您可能关注的文档
- 机械设计(第八版)课后习题答案(细心整理最全系列)(3、5~7章).doc
- 机械设计(第八版)课后习题答案— 1-15章.doc
- 机械设计作业集答案 第四版 西北工大版.doc
- 机械设计基础(第五版)课后习题答案(只有专升本要求章节).doc
- 机械设计基础-习题解答.doc
- 机械设计基础1-8章答案.doc
- 基础_第2版_朱龙英主编课后习题部分答案(有些题号是错误的).doc
- 机械设计基础习题及答案.doc
- 机械设计基础习题集(附解答).pdf
- 机械设计基础考试试题及答案.doc
- 机械设计基础课后习题答案(第四版)陈立德 罗卫平.doc
- 机械设计基础部分习题及答案.doc
- 机械设计复习题.doc
- 机械设计第九版 濮良贵 课后习题答案.doc
- 机械设计第九版课后习题答案.doc
- 机械设计试题及答案.doc
- 机械设计课后答案.doc
- 机电传动控制课后习题答案《第五版》.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明