

- 729.72 KB
- 2022-04-22 11:46:13 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'课后答案网,用心为你服务!大学答案---中学答案---考研答案---考试答案最全最多的课后习题参考答案,尽在课后答案网(www.khdaw.com)!Khdaw团队一直秉承用心为大家服务的宗旨,以关注学生的学习生活为出发点,旨在为广大学生朋友的自主学习提供一个分享和交流的平台。爱校园(www.aixiaoyuan.com)课后答案网(www.khdaw.com)淘答案(www.taodaan.com)
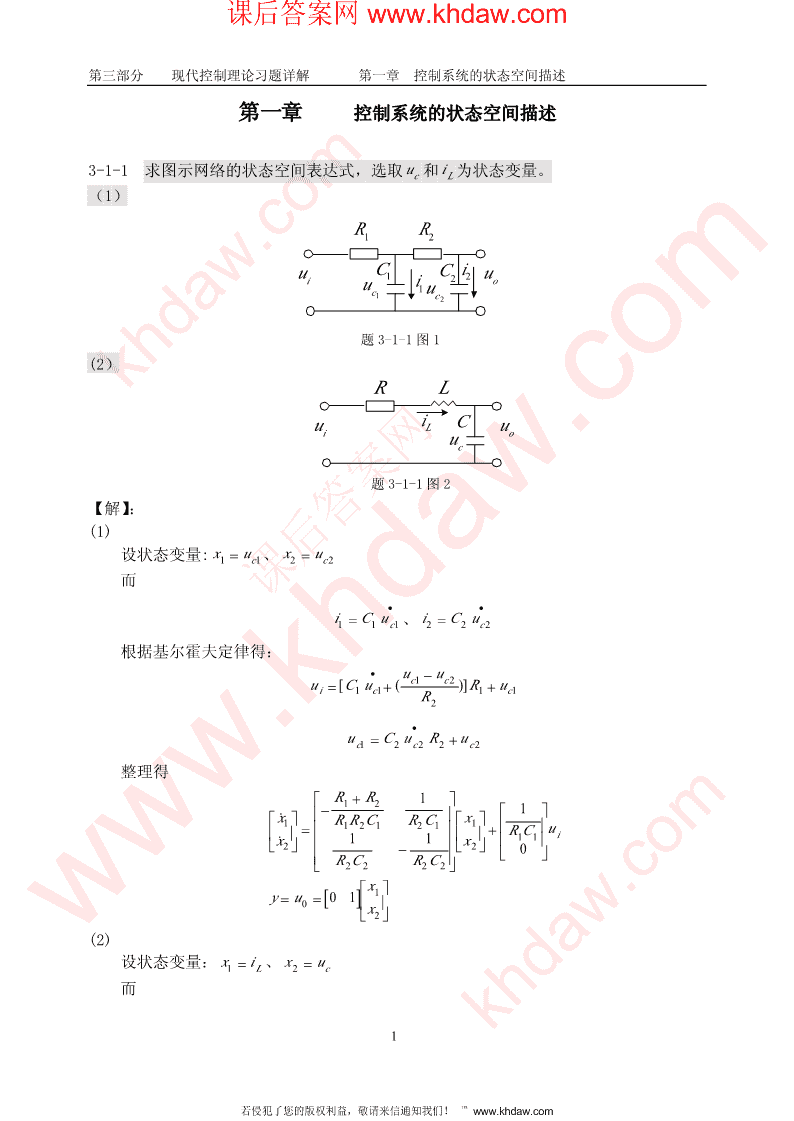
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述第一章控制系统的状态空间描述3-1-1求图示网络的状态空间表达式,选取u和i为状态变量。cL(1)RR12uiC1iC2i2uouc1u1c2题3-1-1图1(2)khdaw.comRLuiLCuiouc题3-1-1图2【解】:(1)设状态变量:x=u、x=u1c12c2而••i=Cu、i=Cu11c122c2根据基尔霍夫定律得:•u−uc1c2ui=[C1uc1+()]R1+uc1R2•u=CuR+uc12c22c2整理得⎡R1+R21⎤̇⎢−⎥⎡1⎤⎡x1⎤⎥=⎢R1R2C1R2C1⎥⎡x1⎤⎥+⎢RC⎥u⎢ẋ⎢11⎥⎢x⎢11⎥i⎣2⎦−⎣2⎦⎣0⎦⎢⎣R2C2R2C2⎥⎦⎡x1⎤y=u=[01]0⎢⎥x⎣2⎦(2)设状态变量:x=i、x=u1L2c而khdaw.com1若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
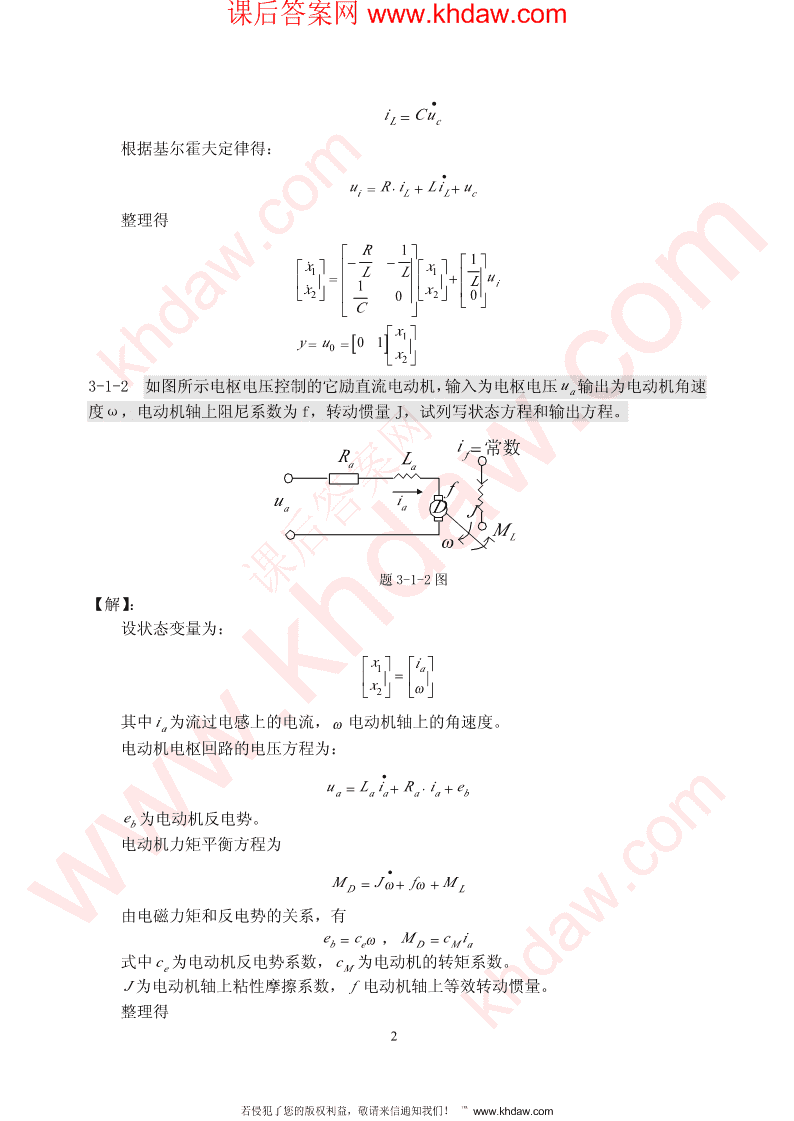
课后答案网www.khdaw.com•i=CuLc根据基尔霍夫定律得:•u=R⋅i+iL+uiLLc整理得⎡R1⎤⎡ẋ⎤⎢−−⎥⎡x⎤⎡1⎤1⎥=LL1⎥+⎢L⎥u⎢̇⎢1⎥⎢i⎣x2⎦⎢0⎥⎣x2⎦⎢⎣0⎥⎦⎣C⎦[⎡]x1⎤y=u0=01⎢⎥⎣x2⎦3-1-2khdaw.com如图所示电枢电压控制的它励直流电动机,输入为电枢电压ua输出为电动机角速度ω,电动机轴上阻尼系数为f,转动惯量J,试列写状态方程和输出方程。i=常数RLfaafuaiaDJMLω题3-1-2图【解】:设状态变量为:⎡x1⎤⎡ia⎤⎢⎥=⎢⎥⎣x2⎦⎣ω⎦其中i为流过电感上的电流,ω电动机轴上的角速度。a电动机电枢回路的电压方程为:•u=Li+R⋅i+eaaaaabe为电动机反电势。b电动机力矩平衡方程为•M=Jω+fω+MDL由电磁力矩和反电势的关系,有e=cω,M=cibeDMa式中c为电动机反电势系数,c为电动机的转矩系数。eMJ为电动机轴上粘性摩擦系数,f电动机轴上等效转动惯量。整理得khdaw.com2若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述⎡Race⎤⎡1⎤⎡ẋ⎤⎢−−⎥⎡x⎤⎢0⎥⎡u⎤1⎥=⎢LaLa⎥1⎥+⎢La⎥a⎢⎢⎢⎥⎣ẋ2⎦⎢cMf⎥⎣x2⎦⎢0−1⎥⎣ML⎦−⎢⎣JJ⎥⎦⎢⎣J⎥⎦[⎡]x1⎤y=ω=01⎢⎥⎣x2⎦(注:解是非唯一的)3-1-3试求图示系统的模拟结构图,并建立状态空间表达式。(1)U(s)K1K2K1Y(s)3khdaw.comT1s+1T2s+1sT4s+11sK5T5s+1题3-1-3图1(2)U1(s)Y(s)c11s+asU2(s)dfY2(s)s+bs+eg题3-1-3图2【解】:(1)如题3-1-3图3设状态变量khdaw.com3若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.comẋxY(s)U(s)Kẋ6xK44ẋ2x21ẋ1x1162K3TT2T41111T1T2xẋT433xẋ55K5T51T5题3-1-3图311khdaw.comẋ1=−x1+x2TT44ẋ=K(x−x)2343ẋ=x321K2K2ẋ4=−x4−x5+x6TTT222K51ẋ5=x2−x5TT551K1ẋ6=−x6+(u−x1)TT11y=x1写成矩阵的形式得:⎡11⎤−0000⎢⎥⎢T4T4⎥⎡0⎤⎢00−K3K300⎥⎢0⎥0⎢10000⎥⎢⎥⎢1KK⎥⎢0⎥⎢000−−22⎥⎢⎥ẋ=x+0u⎢T2T2T2⎥⎢⎥⎢K51⎥⎢0⎥⎢000−0⎥⎢K⎥TT⎢1⎥⎢55⎥⎢K11⎥⎢⎣T1⎥⎦−0000−⎢⎥⎣T1T1⎦y=1[00000]x(2)如图题3-1-3图4设状态变量khdaw.com4若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述u1ẋ2x2x1yc1au2ẋ4x4ẋ3ẋx3df3y2bekhdaw.comg题3-1-3图4ẋ=x12ẋ=−ax+c(u−x)2214ẋ=−ex+fx334ẋ=−bx+dx−dgx+du44232y=x11y=x23y=x1写成矩阵的形式得:0⎡100⎤⎡00⎤⎢⎥⎢⎥0−a0−cc0ẋ=⎢⎥x+⎢⎥u⎢00−ef⎥⎢00⎥⎢⎥⎢⎥⎣0d−dg−b⎦⎣0d⎦1⎡000⎤y=⎢⎥x0⎣010⎦(注:此题解并非唯一的)3-1-4已知系统的微分方程,试将其转变成状态空间表达式。(1)̇̇̇y+2ẏ̇+4ẏ+6y=2u(2)ẏ̇̇+7ẏ̇+3y=u̇+2u(3)ẏ̇̇+5ẏ̇+4ẏ+7y=u̇̇+3u̇+2u)4((4)y+3ẏ̇+2y=−3u̇+u【解】:khdaw.com5若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com在零初始条件下,方程两边拉氏变换,得到传递函数,再根据传递函数求状态空间表达式。此题多解,一般写成能控标准型、能观标准型或对角标准型,以下解法供参考。(1)传递函数为:2G(s)=s3+2s2+4s+6状态空间表达式为:⎡010⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0u⎢⎥⎢⎥⎢⎣−6−4−2⎥⎦⎢⎣1⎥⎦y=2[00x](2)传递函数为:khdaw.coms+2s+2G(s)==3232s+7s+3s+7s+0s+3状态空间表达式为:⎡010⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0u⎢⎥⎢⎥⎢⎣−30−7⎥⎦⎢⎣1⎥⎦y=2[10x](3)传递函数为:2s+3s+2G(s)=32s+5s+4s+7状态空间表达式为:⎡010⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0u⎢⎥⎢⎥⎢⎣−7−4−5⎥⎦⎢⎣1⎥⎦y=2[31x](4)传递函数为:−3s+1−3s+1G(s)==42432s+3s+2s+0s+3s+0s+2状态空间表达式为:⎡0100⎤⎡0⎤⎢⎥⎢⎥00100ẋ=⎢⎥x+⎢⎥u⎢0001⎥⎢0⎥⎢⎥⎢⎥⎣−20−30⎦⎣1⎦y=1[−300]xkhdaw.com6若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述3-1-5已知系统的传递函数,试建立其状态空间表达式,并画出结构图。22s+s+1s+3s+1(1)G(s)=(2)G(s)=322s+6s+11s++6s+5s+624s+2s+3(3)G(s)=(4)G(s)=232(ss+)1(s+)3s+3s+3s+1【解】:此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。(1)⎡010⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0ukhdaw.com⎢⎥⎢⎥⎢⎣−6−11−6⎥⎦⎢⎣1⎥⎦y=1[11x]结构图如图题3-1-5图1所示xuẋ3ẋxẋx32ẋ211y36116题3-1-5图122s+3s+1s+5s+6−2s−52s+5(2)G(s)===1−222s+5s+6s+5s+6s+5s+6⎡01⎤⎡0⎤ẋ=⎢⎥x+⎢⎥u⎣−6−5⎦⎣1⎦y=[−5−]2+u结构图如图题3-1-5图2(a)所示khdaw.com7若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com2uẋxẋxy2ẋ2113556题3-1-5图2(a)或有2s+3s+111G(s)==1−−khdaw.coms2+5s+6s+2s+3⎡−20⎤⎡1⎤ẋ=⎢⎥x+⎢⎥u⎣0−3⎦⎣1⎦y=[−1−1x+]u结构图如图题3-1-5图2(b)所示uẋx112yẋ2x23题3-1-5图2(b)(3)4G(s)=2(ss+)1(s+)341−33−2−1G(s)=+++s(s+)3(s+)12(s+)1khdaw.com8若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述0⎡000⎤⎡1⎤⎢⎥⎢⎥0−3001ẋ=⎢⎥x+⎢⎥u0⎢0−11⎥⎢0⎥⎢⎥⎢⎥0⎣00−1⎦⎣1⎦⎡41⎤y=−−2−1x⎢⎥⎣33⎦结构图如图题3-1-5图3所示uẋx1143khdaw.com−ẋ2x2133y−ẋ−ẋx3x3442题3-1-5图3(4)2s+2s+3G(s)=32s+3s+3s+1⎡010⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0u⎢⎥⎢⎥⎢⎣−1−3−3⎥⎦⎢⎣1⎥⎦y=3[21x]结构图如图题3-1-5图4所示khdaw.com9若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com2xuẋ33ẋ2ẋx2ẋ1x13y333题3-1-5图43-1-6将下列状态方程化成对角标准型。⎡01⎤⎡0⎤(1)khdaw.comẋ=⎢⎥x+⎢⎥u⎣−5−6⎦⎣1⎦⎡010⎤⎡23⎤⎢⎥⎢⎥(2)ẋ=302x+15u⎢⎥⎢⎥⎢⎣−12−7−6⎥⎦⎢⎣71⎥⎦⎡010⎤⎡1⎤⎢⎥⎢⎥(3)ẋ=001x+1u⎢⎥⎢⎥⎢⎣−6−11−6⎥⎦⎢⎣0⎥⎦【解】:(1)特征方程为:2λ(D)λ=6λ+5+=(λ+1)(λ+)5=0。特征值为:λ=−,1λ=−512系统矩阵A为友矩阵,且特征值互异,因此可以化为对角标准型,其变换矩阵P为范德蒙矩阵。变换阵:⎡11⎤⎡11⎤−1⎡−5−1⎤P=⎢⎥=⎢,⎥P=−.025⎢⎥λ⎣1λ2⎦⎣−1−5⎦⎣11⎦线性变换后的状态方程为:ẋ=(P−1AP)x+(P−1b)u=⎡−10⎤⎥x+⎡.025⎤⎥u⎢⎢⎣0−5⎦⎣−.025⎦(2)特征方程为:khdaw.com10若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述λ−1032λI−A=−3λλ−2=λ6+11λ+6+(λ=1+)(λ+2)(λ+)3=0127λ+6特征值为:λ=−,1λ=−,2λ=−3。123⎡P11P12P13⎤⎢⎥设变换阵:P=⎢P21P22P23⎥⎢⎣P31P32P33⎥⎦由(λI−A)P=0得iikhdaw.com⎡−1−10⎤⎡P11⎤⎡P11⎤⎡1⎤⎢⎥⎢⎥⎢⎥⎢⎥当λ1=−1时,⎢−3−1−2⎥⎢P21⎥=0取P1=⎢P21⎥=⎢−1⎥12⎢⎣75⎥⎦⎢⎣P31⎥⎦⎢⎣P31⎥⎦⎢⎣−1⎥⎦⎡−2−10⎤⎡P12⎤⎡P12⎤⎡2⎤⎢⎥⎢⎥⎢⎥⎢⎥当λ2=−2时,⎢−3−2−2⎥⎢P22⎥=0取P2=⎢P22⎥=⎢−4⎥12⎢⎣74⎥⎦⎢⎣P32⎥⎦⎢⎣P32⎥⎦⎢⎣1⎥⎦⎡−3−10⎤⎡P13⎤⎡P13⎤⎡1⎤⎢⎥⎢⎥⎢⎥⎢⎥当λ=−3时,−3−3−2P=0取P=P=−33⎢⎥⎢23⎥3⎢23⎥⎢⎥12⎢⎣73⎥⎦⎢⎣P33⎥⎦⎢⎣P33⎥⎦⎢⎣3⎥⎦变换阵:⎡121⎤⎡5.45.21⎤⎢⎥−1⎢⎥P=−1−4−3,P=−3−2−1⎢⎥⎢⎥⎢⎣−113⎥⎦⎢⎣5.25.11⎥⎦线性变换后的状态方程为:⎡−100⎤18⎡5.27⎤̇⎢⎥⎢⎥x=0−20x+−15−20u⎢⎥⎢⎥⎢⎣00−3⎥⎦13⎢⎣5.16⎥⎦(3)特征方程为:32λ()Dλ=λ6+11λ+6+(λ=1+)(λ+2)(λ+)3=0。特征值为:λ=−,1λ=−,2λ=−3。123khdaw.com11若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com系统矩阵A为友矩阵,且特征值互异,因此可以化为对角标准型,其变换矩阵P为:1⎡11⎤⎡111⎤⎢⎥⎢⎥P=λ⎢1λ2λ3⎥=⎢−1−2−3⎥⎢222⎥⎢⎥λ⎣1λ2λ3⎦⎣149⎦⎡35.25.0⎤−1⎢⎥P=−3−4−1⎢⎥⎢⎣15.15.0⎥⎦线性变换后的状态空间表达式为:⎡−100⎤⎡5.5⎤̇⎢⎥⎢⎥x=0−20x+−7ukhdaw.com⎢⎥⎢⎥⎢⎣00−3⎥⎦⎢⎣5.2⎥⎦3-1-7将下列状态方程化成约旦标准型。⎡−21⎤⎡0⎤(1)ẋ=⎢⎥x+⎢⎥u⎣1−2⎦⎣1⎦4⎡1−2⎤⎡31⎤⎢⎥⎢⎥(2)ẋ=102x+27u⎢⎥⎢⎥1⎢⎣−13⎥⎦⎢⎣53⎥⎦0⎡10⎤⎡0⎤⎢⎥⎢⎥(3)ẋ=001x+0u⎢⎥⎢⎥2⎢⎣−54⎥⎦⎢⎣1⎥⎦【解】:(1)特征方程为:λ+2−12λI−A==λ+4λ+3=(λ+1)(λ+)3=0−1λ+2特征值为:λ=−,1λ=−3。12⎡P11P12⎤设变换阵:P=⎢⎥⎣P21P22⎦由(λI−A)P=0得:iikhdaw.com12若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述⎡1−1⎤⎡P11⎤⎡1⎤当λ1=−1时,⎢⎥⎢⎥=0取P1=⎢⎥⎣−11⎦⎣P21⎦⎣1⎦⎡−1−1⎤⎡P12⎤⎡1⎤当λ2=−3时,⎢⎥⎢⎥=0取P2=⎢⎥⎣−1−1⎦⎣P22⎦⎣−1⎦⎡11⎤−1⎡5.05.0⎤P=⎢⎥,P=⎢⎥⎣1−1⎦⎣5.0−5.0⎦线性变换后的状态空间表达式为:ẋ=(P−1AP)x+(P−1b)u=⎡−10⎤⎥x+⎡5.0⎤⎥u⎢⎢khdaw.com⎣0−3⎦⎣−5.0⎦(2)特征方程为:λ−4−122λI−A=−1λ−2=(λ−1)(λ−)3=0−11λ−3特征值为:λ=λ=,3λ=1。123设变换阵:⎡P11P12P13⎤⎢⎥P=⎢P21P22P23⎥⎢⎣P31P32P33⎥⎦⎡−1−12⎤⎡P11⎤⎡1⎤⎢⎥⎢⎥⎢⎥当λ=3时,由(λI−A)P=0得:−13−2P=0,取P=1111⎢⎥⎢21⎥1⎢⎥⎢⎣−110⎥⎦⎢⎣P31⎥⎦⎢⎣1⎥⎦⎡−1−12⎤⎡P12⎤⎡−1⎤⎡1⎤⎢⎥⎢⎥⎢⎥⎢⎥当λ=3时,由(λI−A)P=−P得:−13−2P=−1,取P=02221⎢⎥⎢22⎥⎢⎥2⎢⎥⎢⎣−110⎥⎦⎢⎣P32⎥⎦⎢⎣−1⎥⎦⎢⎣0⎥⎦⎡−3−12⎤⎡P13⎤⎡0⎤⎢⎥⎢⎥⎢⎥当λ3=1时,由(λ3I−A)P3=0得:⎢−11−2⎥⎢P23⎥=0,取P3=⎢2⎥⎢⎣−11−2⎥⎦⎢⎣P33⎥⎦⎢⎣1⎥⎦变换阵:khdaw.com13若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com1⎡10⎤0⎡−12⎤⎢⎥−1⎢⎥P=102,P=11−2⎢⎥⎢⎥1⎢⎣01⎥⎦0⎢⎣1−1⎥⎦线性变换后的状态空间表达式为:⎡310⎤⎡8−1⎤̇⎢⎥⎢⎥x=030x+−52u⎢⎥⎢⎥⎢⎣001⎥⎦⎢⎣−34⎥⎦(3)特征方程为:322khdaw.comD(λ)=λ−4λ+5λ−2=(λ−)1(λ−)2=0。特征值为:λ=λ=,1λ=2。123系统矩阵A为友矩阵,且特征值有重根,因此可以化为约当标准型,其变换矩阵P为:⎡dP⎤P=[PPP=P]⋮1⋮P123⎢13⎥⎣dλ1⎦⎡1⎤⎡1⎤⎡0⎤⎡0⎤⎡1⎤⎡1⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥P=λ=1,P=1=1,P=λ=21⎢1⎥⎢⎥2⎢⎥⎢⎥3⎢3⎥⎢⎥⎢2⎥⎢⎥⎢⎥⎢⎥⎢2⎥⎢⎥⎣λ1⎦⎣1⎦⎣2λ1⎦⎣2⎦⎣λ3⎦⎣4⎦变换阵:1⎡01⎤⎡02−1⎤⎢⎥−1⎢⎥P=112,P=−23−1⎢⎥⎢⎥1⎢⎣24⎥⎦⎢⎣1−21⎥⎦线性变换后的状态空间表达式为:⎡110⎤⎡−1⎤̇⎢⎥⎢⎥x=010x+−1u⎢⎥⎢⎥⎢⎣002⎥⎦⎢⎣1⎥⎦⎡−210⎤⎡−1−1⎤⎢⎥⎢⎥3-1-8已知状态空间表达式,ẋ=0−30x+14u⎢⎥⎢⎥⎢⎣01−4⎥⎦⎢⎣2−3⎥⎦khdaw.com14若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述⎡100⎤(1)试用~−1−1⎢⎥x=Px进行线性变换,变换矩阵P=020求变换后的状态空间表达式。⎢⎥⎢⎣001⎥⎦(2)试证明变换前后系统的特征值的不变性和传递函数矩阵的不变性。【解】:(1)x~=P−1x⇒x=P~x⎡−25.00⎤~−1⎢⎥A=PAP=0−30⎢⎥khdaw.com⎢⎣05.0−4⎥⎦⎡−1−1⎤~−1⎢⎥B=PB=28⎢⎥⎢⎣2−3⎥⎦⎡−25.00⎤⎡−1−1⎤~̇⎢⎥~⎢⎥x=0−30x+28u⎢⎥⎢⎥⎢⎣05.0−4⎥⎦⎢⎣2−3⎥⎦(2)证明:变换后的系统矩阵为~AP−1AP~−1=,输入矩阵为B=PB特征值的不变性:−1−1−1−1sI−PAP=sPP−PAP=PsI−AP=sI−A传递函数矩阵的不变性:−1−1−1−1−1−1−1G(s)=CP(sI−PAP)PB=CP(sPP−PAP)PB−1−1−1−1−1−1−1=CP[P(sI−A)P]PB=CPP(sI−A)PPB=C(sI−A)B验证:变换前的特征方程为:λ(D)(λ=2+)(λ+3)(λ+)4=01变换后的特征方程为:λ(D)(λ=2+)(λ+3)(λ+)4=02D(λ)=D(λ)12所以变换前后系统的特征值是不变的。3-1-9已知两个子系统的传递函数矩阵分别为khdaw.com15若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com⎡11⎤⎡11⎤⎢⎥⎢⎥G1(s)=⎢s+1s+2⎥,G2(s)=⎢s+3s+1⎥,试求两子系统串联后和并联后的传递函数11⎢0⎥⎢0⎥⎣s⎦⎣s+1⎦矩阵。【解】:(1)串联G(s)在前,G(s)在后时12⎡12s2+6s+6⎤⎡11⎤⎡11⎤⎢⎥Gs=GsGs=⎢s+3s+1⎥⎢s+1s+2⎥(⎢s+1)(s+)3(ss1+)(s+2)(s+)3⎥()2()1()⎢1⎥⎢1⎥=⎢11⎥⎢0⎥⎢0⎥⎣s+1⎦⎣s⎦⎢(s+)12(s+1)(s+)2⎥khdaw.com⎣⎦G(s)在前,G(s)在后时21⎡11⎤⎡11⎤⎡2s+51⎤Gs=GsGs=⎢s+1s+2⎥⎢s+3s+1⎥(⎢s1+)(s+2)(s+)3(s+)12⎥()1()2()⎢1⎥⎢1⎥=⎢⎥⎢⎥⎢⎥⎢1⎥000⎣s⎦⎣s+1⎦⎢⎣s(s+)1⎥⎦(2)并联⎡11⎤⎡11⎤⎡2s+42s+3⎤Gs=Gs+Gs=⎢s+1s+2⎥+⎢s+3s+1⎥(⎢s+1)(s+)3(s+1)(s+)2⎥()1()2()⎢1⎥⎢1⎥=⎢11⎥⎢0⎥⎢0⎥⎢⎥⎣s⎦⎣s+1⎦⎢⎣(s+)1s⎥⎦3-1-10已知离散系统的差分方程为(y)3k+3(+yk)2+5+(yk)1++(y)k=(uk+)1+2u(k),求系统的状态空间表达式,并画出系统结构图。【解】:根据差分方程,在零初始条件下,方程两边Z变换,得到系统的脉冲传递函数为z+2G(z)=32z+3z+5z+1⎡010⎤⎡0⎤⎢⎥⎢⎥x(k+)1=001x(k)+0u(k)⎢⎥⎢⎥⎢⎣−1−5−3⎥⎦⎢⎣1⎥⎦(y)k=2[10x(k])其结构图如图题3-1-10图所示:khdaw.com16若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第一章控制系统的状态空间描述u−1x3(k)x−̇13x2(k)−1x1(k)yzzz235题3-1-10图⎡x1(k+)1⎤⎡01⎤⎡x1(k)⎤⎡0⎤3-1-11已知离散系统的状态空间表达式为⎢⎥=⎢⎥⎢⎥+⎢⎥u(k),khdaw.com⎣x2(k+)1⎦⎣13⎦⎣x2(k)⎦⎣1⎦⎡x1(k)⎤y(k)=[11⎢]⎥,求系统的脉冲传递函数。x(k)⎣2⎦【解】:−1W(z)=C(zI−G)H−1⎡z−1⎤⎡0⎤=[11⎢]⎥⎢⎥⎣−1z−3⎦⎣1⎦1⎡z−31⎤⎡0⎤=[11]2⎢⎥⎢⎥z−3z−1⎣1z⎦⎣1⎦z+1=2z−3z−1也可以直接写出。3-1-12已知系统的脉冲传递函数,试求系统的状态空间表达式。22z+z+2(1)G(z)=32z+6z+11z+61(2)G(z)=32z+4z+5z+2【解】:此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。(1)khdaw.com17若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com⎡010⎤⎡0⎤⎢⎥⎢⎥x(k+)1=001x(k)+0u(k)⎢⎥⎢⎥⎢⎣−6−11−6⎥⎦⎢⎣1⎥⎦(y)k=2[12x(k])(2)⎡010⎤⎡0⎤⎢⎥⎢⎥x(k+)1=001x(k)+0u(k)⎢⎥⎢⎥⎢⎣−2−5−4⎥⎦⎢⎣1⎥⎦(y)k=1[00x(k])khdaw.comkhdaw.com18若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解第二章状态空间表达式的解3-2-1试求下列矩阵A对应的状态转移矩阵φ(t)。⎡01⎤⎡0−1⎤(1)A=⎢⎥(2)A=⎢⎥⎣0−2⎦⎣40⎦⎡010⎤⎡01⎤⎢⎥(3)A=⎢⎥(4)A=⎢001⎥⎣−1−2⎦⎢⎣2−54⎥⎦0⎡100⎤⎡λ000⎤⎢⎥⎢⎥00100λ10(5)A=⎢⎥(6)A=⎢⎥0⎢001⎥0⎢0λ1⎥⎢⎥⎢⎥khdaw.com0⎣000⎦⎣000λ⎦【解】:(1)⎡11⎤−1⎢⎥−1−1−1⎡s−1⎤−1ss(s+)2Φ()t=L[(sI−A)]=L{⎢⎥}=L⎢⎥⎣0s+2⎦⎢01⎥⎢⎣(s+)2⎥⎦1⎡5.05.0⎤⎢−⎥⎡−−2t⎤−1ss(s+)215.05.0e=L⎢⎥=⎢⎥10e−2t⎢0⎥⎢⎣⎥⎦⎢⎣(s+)2⎥⎦(2)⎡s1⎤−1−−1−1−1⎡s1⎤−1⎢22⎥⎡cos2t−5.0sin2t⎤Φ()t=L[(sI−A)]=L{⎢⎥}=L⎢s+4s+4⎥=⎢⎥⎣−4s⎦⎢4s⎥⎣2sin2tcos2t⎦⎢⎣s2+4s2+4⎥⎦(3)⎡s+21⎤⎡s−1⎤−1⎢22⎥Φ()t=L−1[(sI−A)−1]=L−1{⎥}=L−1⎢(s+)1(s+)1⎥⎢1s+2⎢1s⎥⎣⎦−⎢22⎥⎣(s+)1(s+)1⎦⎡te−t+e−tte−t⎤Φ(t)=⎢⎥−t−t−t⎢⎣−tee−te⎥⎦(4)特征值为:λ=λ=,1λ=2。123由习题3-1-7(3)得将A阵化成约当标准型的变换阵khdaw.comP为19若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解1⎡01⎤⎡02−1⎤⎢⎥−1⎢⎥P=112,P=−23−1⎢⎥⎢⎥1⎢⎣24⎥⎦⎢⎣1−21⎥⎦线性变换后的系统矩阵为:⎡110⎤~−1⎢⎥A=PAP=010⎢⎥⎢⎣002⎥⎦⎡ettet0⎤~⎢⎥tAte=⎢0e0⎥⎢00e2t⎥khdaw.com⎣⎦1⎡01⎤⎡e2t00⎤⎡02−1⎤~⎢⎥AtAt−1⎢⎥tt⎢⎥Φ(t)=e=PeP=1⎢12⎥⎢0ete⎥⎢−23−1⎥1⎢24⎥⎢00et⎥⎢1−21⎥⎣⎦⎣⎦⎣⎦⎡e2t−2tet−2e2t+3tet+2ete2t−tet−et⎤⎢2ttt2ttt2ttt⎥Φ(t)2=⎢e2−te2−e4−e+3te+5e2e−te−2e⎥4⎢e2t2−tet4−et8−e2t+3tet+8et4e2t−tet−3et⎥⎣⎦(5)为结构四重根的约旦标准型。λλ==λ=λ=01234⎡1213⎤⎡1213⎤1ttt1ttt⎢⎥⎢⎥!2!326⎢⎥⎢⎥Atλt⎢12⎥⎢12⎥Φ(t)=e=e01tt=01tt⎢!2⎥⎢2⎥0⎢01t⎥0⎢01t⎥⎢⎥⎢⎥0⎣001⎦0⎣001⎦(6)λλ=λ==λ=λ1234虽然特征值相同,但对应着两个约当块。At⎡e10⎤AtΦ(t)=e=⎢At⎥0e2⎢⎣⎥⎦A=[]λ⇒eA1t=[eλt]1khdaw.com20若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡λtλt12λt⎤etete⎡λ10⎤⎢2⎥⎢⎥At⎢λtλt⎥A=0λ1⇒e2=0ete2⎢⎥⎢⎥⎢00λ⎥⎢00eλt⎥⎣⎦⎢⎥⎣⎦⎡eλt000⎤⎢1⎥λtλt2λtAt⎢0etete⎥Φ(t)=e=2⎢⎥λtλt⎢00ete⎥⎢000eλt⎥⎣⎦−1⎡s−λ000⎤⎢⎥khdaw.com−1−1−1⎢0s−λ−10⎥或Φ()t=L[(sI−A)]=L{}⎢00s−λ−1⎥⎢⎥⎣000s−λ⎦⎡−1⎤000⎢⎥−s+λ⎢⎥−11−1⎢0⎥⎢23⎥−1−s+λ(−s+λ)(−s+λ)=L⎢−11⎥⎢00⎥2⎢−s+λ(−s+λ)⎥⎢−1⎥⎢000⎥⎣−s+λ⎦⎡eλt000⎤⎢1⎥λtλt2λt⎢0etete⎥=2⎢⎥λtλt⎢00ete⎥⎢000eλt⎥⎣⎦3-2-2已知系统的状态方程和初始条件⎡100⎤⎡1⎤⎢⎥⎢⎥ẋ=010x,x)0(=0⎢⎥⎢⎥⎢⎣012⎥⎦⎢⎣1⎥⎦(1)用laplace法求状态转移矩阵;(2)用化标准型法求状态转移矩阵;(3)用化有限项法求状态转移矩阵;(4)求齐次状态方程的解。【解】:(1)khdaw.com21若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解−1⎡s−100⎤−1[−1−1⎢]⎥Φ()t=L(sI−A)=L{0s−10}⎢⎥⎢⎣0−1s−2⎥⎦⎡1⎤⎢00⎥⎢(s−)1⎥⎡et00⎤−1⎢1⎥⎢t⎥=L⎢00⎥=⎢0e0⎥(s−)1⎢⎥⎢0−et+e2te2t⎥111⎣⎦⎢0⎥⎢⎣(s−)1(s−)2(s−)2⎥⎦(2)特征方程为:khdaw.comλ−1002λI−A=0λ−10=(λ−)1(λ−)2=00−1λ−2特征值为:λ=λ=,1λ=2。1230⎡00⎤⎢⎥rank(λI−A)=rank000=n=11⎢⎥10⎢⎣−1−1⎥⎦⎡000⎤2⎢⎥rank(λ1I−A)=rank⎢000⎥=n2=1⎢⎣011⎥⎦由于n=n=1,所以λ对应的广义特征向量的阶数为1。211求满足(λI−A)P=0的解P,得:1110⎡00⎤⎡P11⎤⎡1⎤⎢⎥⎢⎥⎢⎥000P=0,P=0⎢⎥⎢21⎥1⎢⎥0⎢⎣−1−1⎥⎦⎢⎣P31⎥⎦⎢⎣0⎥⎦再根据(λI−A)P=0,且保证P、P线性无关,解得:2212TP=0[1−1]2对于当λ=2的特征向量,由(λI−A)P=0容易求得:333TP=0[01]3所以变换阵为:khdaw.com22若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡100⎤⎡100⎤[⎢]⎥−1⎢⎥P=P1P2P3=⎢010⎥,P=⎢010⎥⎢⎣0−11⎥⎦⎢⎣011⎥⎦线性变换后的系统矩阵为:⎡100⎤~−1⎢⎥A=PAP=010⎢⎥⎢⎣002⎥⎦⎡et00⎤~⎢⎥tAte=⎢0e0⎥⎢00e2t⎥khdaw.com⎣⎦⎡et00⎤⎡et00⎤At⎢t⎥−1⎢t⎥Φ(t)=e=P⎢0e0⎥P=⎢0e0⎥⎢00e2t⎥⎢0−et+e2te2t⎥⎣⎦⎣⎦(3)特征值为:λ=λ=,1λ=2。123eλ1t=a+aλ+aλ201121teλ1t=a+2aλ121eλ3t=a+aλ+aλ201323即−12λt⎡a⎤⎡1λλ⎤⎡e1⎤011⎢⎥⎢⎥⎢λt⎥a=⎢012λ⎥⎢te1⎥⎢1⎥1⎢a⎥⎢1λλ2⎥⎢eλ3t⎥⎣2⎦⎣33⎦⎣⎦−1⎡t⎤⎡111⎤e⎢⎥⎢t⎥=⎢012⎥⎢te⎥⎢124⎥⎢e2t⎥⎣⎦⎣⎦⎡0−21⎤⎡et⎤⎢⎥⎢t⎥=⎢23−2⎥⎢te⎥⎢−1−11⎥⎢e2t⎥⎣⎦⎣⎦khdaw.com23若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡−2tet+e2t⎤⎢tt2t⎥=2⎢e+3te−2e⎥⎢−et−tet+e2t⎥⎣⎦At2e=a0I+a1A+a2A⎡et00⎤⎢t⎥=⎢0e0⎥⎢0−et+e2te2t⎥⎣⎦(4)khdaw.com⎡et00⎤⎡1⎤⎡et⎤⎢t⎥⎢⎥⎢⎥(x)t=Φ(t)x)0(=⎢0e0⎥⎢0⎥=⎢0⎥⎢0−et+e2te2t⎥⎢1⎥⎢e2t⎥⎣⎦⎣⎦⎣⎦3-2-3试判断下列矩阵是否满足状态转移矩阵的条件,如果满足,试求对应的矩阵A。1⎡00⎤⎢⎥1⎡1(5.0−e−2t)⎤(1)Φ(t)=0sintcost(2)Φ(t)=⎢⎥⎢⎥−2t⎢⎥⎢⎣0e⎥⎦⎣0−costsint⎦⎡2e−t−e−2t−2e−t+2e−2t⎤5.0⎡e−t+5.0e3t−.025e−t+.025e3t⎤(3)Φ(t)=⎢⎥(4)Φ(t)=⎢⎥−t−2t−t−2t−t3t−t3t⎢⎣e−e−e+2e⎥⎦⎢⎣−e+e5.0e+5.0e⎥⎦【解】:(1)1⎡00⎤1⎡00⎤⎢⎥⎢⎥∵Φ)0(=0sintcost=001≠I⎢⎥⎢⎥⎢⎣0−costsint⎥⎦0⎢⎣−10⎥⎦t=0∴不满足状态转移矩阵的条件。(2)1⎡1(5.0−e−2t)⎤⎡10⎤∵Φ)0(=⎢−2t⎥=⎢⎥=I⎢⎣0e⎥⎦t=0⎣01⎦∴满足状态转移矩阵的条件。由Φ̇(t)=AΦ(t),得Φ̇)0(=AΦ)0(=A。khdaw.com24若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡0e−2t⎤⎡0e−2t⎤⎡01⎤∴Φ̇(t)=⎢−2t⎥,⇒A=Φ̇)0(=⎢−2t⎥=⎢⎥⎢⎣0−2e⎥⎦⎢⎣0−2e⎥⎦t=0⎣0−2⎦(3)⎡2e−t−e−2t−2e−t+2e−2t⎤∵Φ)0(=⎢⎥=I−t−2t−t−2t⎢⎣e−e−e+2e⎥⎦t=0∴满足状态转移矩阵的条件。⎡2−e−t+2e−2t2e−t−4e−2t⎤⎡0−2⎤A=Φ̇)0(=⎢−t−2t−t−2t⎥=⎢⎥⎢⎣−e+2ee−4e⎥⎦t=0⎣1−3⎦(4)khdaw.com5.0⎡e−t+5.0e3t−.025e−t+.025e3t⎤∵Φ)0(=⎢⎥=I−t3t−t3t⎢⎣−e+e5.0e+5.0e⎥⎦t=0∴满足状态转移矩阵的条件。⎡−5.0e−t+5.1e3t.025e−t+.075e3t⎤⎡11⎤A=Φ̇)0(=⎢−t3t−t3t⎥=⎢⎥⎢⎣e+3e−5.0e+5.1e⎥⎦t=0⎣41⎦⎡−2t1⎤3-2-4已知线性时变系统为ẋ=⎢⎥x,试求系统的状态转移矩阵。⎣1−2t⎦【解】:⎡−2t11⎤⎡−2t21⎤取A(t)=⎥,A(t)=,⎥得:A(t)*A(t)=A(t)*A(t)1⎢2⎢12211−2t1−2t⎣1⎦⎣2⎦t2∫A(τ)dτt⎡−2τ1⎤1t⎡−2τ1⎤Φ,(tt)=et0=I+⎥dτ+⎥dτ+⋯0∫⎢∫⎢t0⎣1−2τ⎦!2t0⎣1−2τ⎦⎡22233122⎤1⎢+(t0−t)+(t−t0)+(t−t0)+⋯t−t0+t0−t+⋯⎥32Φ(t,t0)=⎢⎥22222331⎢t−t+t−t+⋯1+(t−t)+(t−t)+(t−t)+⋯⎥00000⎣32⎦⎡01⎤⎡0⎤⎡1⎤3-2-5已知线性定常系统的状态方程为ẋ=⎢⎥x+⎢⎥u,初始条件为x)0(=⎢⎥试⎣−2−3⎦⎣1⎦⎣−1⎦求输入为单位阶跃函数时系统状态方程的解。【解】:khdaw.com25若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解−1−1Φ()t=L[(sI−A)]⎡s+31⎤⎢(s+1)(s+)2(s+1)(s+)2⎥⎡2e−t−e−2te−t−e−2t⎤−1Φ(t)=L⎢⎥=⎢⎥⎢2s⎥⎢−2e−t+2e−2t−e−t+2e−2t⎥−⎣⎦(⎢⎣s1+)(s+)2(s+1)(s+)2⎥⎦⎡5.0+5.0e−2t⎤−1()xt=(Φ)tx)0(−A[I−Φ(t)]B=⎢⎥−2t⎢⎣−e⎥⎦⎡01⎤⎡2⎤3-2-6已知线性定常系统的状态空间表达式为ẋ=⎢⎥x+⎢⎥u,y=[12x],已知⎣−5−6⎦⎣0⎦⎡0⎤−t状态的初始条件为khdaw.comx)0(=⎢⎥,输入量为ut)(=e(t≥)0,试求系统的输出响应。⎣1⎦【解】:⎡5−t1−5t1−t1−5t⎤e−ee−eΦ()t=L−[(1sI−A)−1]=⎢4444⎥⎢⎥5−t5−5t1−t5−5t⎢−e+e−e+e⎥⎣4444⎦t()yt=c(Φ)tx)0(+∫cΦ(tτ−)Bu(τ)dτ0⎡5−t1−5t1−t1−5t⎤e−ee−e[⎢]4444⎥⎡0⎤=12⎢⎥⎢⎥5−t5−5t1−t5−5t⎣1⎦⎢−e+e−e+e⎥⎣4444⎦t⎡5−(t−τ)1−(5t−τ)1−(t−τ)1−(5t−τ)⎤e−ee−e⎢4444⎥⎡2⎤−τ+∫1[2⎢]⎥⎢⎥edτ5−(t−τ)5−(5t−τ)1−(t−τ)5−(5t−τ)⎣0⎦0⎢−e+e−e+e⎥⎣4444⎦t⎡5−(t−τ)1−(5t−τ)⎤e−e=⎛−1e−t+9e−5t⎞⎟+1[2⎢]22⎥e−τdτ⎜∫⎢⎥⎝44⎠5−(t−τ)5−(5t−τ)0⎢−e+e⎥⎣22⎦t⎛1−t9−5t⎞5−t9−5t+4τ5−t7−t9−5t=⎜−e+e⎟+∫(−e+e)dτ=−te+e+e(t≥)0⎝44⎠222880⎡1⎤3-2-7线性定常系统的齐次方程为ẋ=Ax(t),已知当x)0(=⎢⎥时,状态方程的解为khdaw.com⎣−2⎦26若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡e−2t⎤⎡1⎤⎡e−t⎤x(t)=⎢−2t⎥;而当x)0(=⎢⎥时,状态方程的解为x(t)=⎢−t⎥,试求:⎢⎣−2e⎥⎦⎣−1⎦⎢⎣−e⎥⎦(1)系统的状态转移矩阵Φ(t);(2)系统的系数矩阵A。【解】:xt)(=Φt)(x)0(⎡x1(t)⎤φ⎡11φ12⎤⎡x1)0(⎤⇒⎢⎥=⎢⎥⎢⎥⎣x2(t)⎦φ⎣21φ22⎦⎣x2)0(⎦⎡e−2t⎤φ⎡φ⎤⎡1⎤⎡e−t⎤φ⎡φ⎤⎡1⎤11121112⇒⎢−2t⎥=⎢⎥⎢⎥;⎢−t⎥=⎢⎥⎢⎥khdaw.com⎢⎣−2e⎥⎦φ⎣21φ22⎦⎣−2⎦⎢⎣−e⎥⎦φ⎣21φ22⎦⎣−1⎦−2t−2tφ−2φ=e,φ−2φ=−2e11122122−t−tφ11−φ12=e,φ21−φ22=−eφ⎡φ⎤⎡2e−t−e−2te−t−e−2t⎤1112Φ(t)=⎢⎥=⎢−t−2t−t−2t⎥φ⎣21φ22⎦⎢⎣−2e+2e−e+2e⎥⎦⎡01⎤A=Φ̇t)(t=0=⎢⎥⎣−2−3⎦⎡01⎤⎡1⎤3-2-8已知线性时变系统为ẋ=⎢⎥x,x)0(=⎢⎥,试求系统状态方程的解。⎣0t⎦⎣−1⎦【解】:⎡01⎤⎡01⎤对任意时间t1和t2有A(t1)=⎢⎥,A(t2)=⎢⎥⎣0t1⎦⎣0t2⎦得:A(t)*A(t)≠A(t)*A(t)1221所以有ttτ1Φ(t)0,=I+∫τ(A)τd+∫τA(1)∫Aτ(2)dτ2dτ1+⋯000⎡12⎤0t⎡10⎤⎡0t⎤⎢⎥=⎢⎥+⎢⎥+⎢2⎥+⋯0105.0t21⎣⎦⎣⎦⎢0t3⎥⎣6⎦khdaw.com27若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡12⎤0t⎡10⎤⎡0t⎤⎢2⎥⎡1⎤(x)t=Φ(t)0,x)0(=(⎢⎥+⎢2⎥+⎢1⎥+⋯)×⎢⎥⎣01⎦⎣05.0t⎦⎢0t3⎥⎣−1⎦⎣6⎦⎡12⎤⎡12⎤1t+t⋯1−t−t⋯⎢⎥⎡1⎤⎢⎥x(t)=⎢2⎥×⎢⎥=⎢2⎥⎢213⎥⎣−1⎦⎢213⎥01+5.0t+t⋯−1(+5.0t+t⋯)⎣6⎦⎣6⎦3-2-9已知线性定常离散系统的状态空间表达式为⎡11⎤⎡x[(1k+)1T]⎤⎢28⎥⎡x1(kT)⎤⎡10⎤⎡u1(kT)⎤⎢khdaw.com⎥=⎢11⎥⎢⎥+⎢⎥⎢⎥⎣x2[(k+)1T]⎦⎢⎥⎣x2(kT)]⎦⎣01⎦⎣u2(kT)]⎦⎣82⎦⎡x1(kT)⎤⎡x1)0(⎤⎡−1⎤(ykT)=[11⎢]⎥,⎢⎥=⎢⎥⎣x2(kT)]⎦⎣x2)0(⎦⎣3⎦若u(kT)与u(kT)为同步采样时,且u(kT)是来自斜坡函数t的采样,即u(t)=t,u(kT)12112−t是来自指数函数ut)(=e的采样。试求系统的输出响应y(KT)。2【解】:方法一:利用Z变换的方法求解:⎡11⎤⎢28⎥⎡10⎤G=⎢⎥,H=⎢,⎥C=[11]11⎣01⎦⎢⎥⎣82⎦Tz−tzZ[u(t)]=Z(t)=,[Zu()]t=Z(e)=122−T(z−)1(z−e)⎡Tz⎤⎢2⎥(z−)1U(z)=⎢⎥⎢z⎥⎢(z−e−T)⎥⎣⎦−1−1X(z)=(zI−G)zx)0(+(zI−G)HU(z)−1−1⎡z−5.0−.0125⎤⎡−1⎤⎡z−5.0−.0125⎤X(z)=⎢⎥z⎢⎥+⎢⎥HU(z)⎣−.0125z−5.0⎦⎣3⎦⎣−.0125z−5.0⎦khdaw.com28若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡322(z−)18⎤⎡322(z−)18⎤64⎢z2−64z+1564z2−64z+15⎥⎡−1⎤64⎢z2−64z+1564z2−64z+15⎥⎡10⎤X(z)=⎢⎥z⎢⎥+⎢⎥⎢⎥U(z)⎢8322(z−)1⎥⎣3⎦⎢8322(z−)1⎥⎣01⎦64⎢⎣z2−64z+1564z2−64z+15⎥⎦64⎢⎣z2−64z+1564z2−64z+15⎥⎦⎡32z2(z−)18z⎤⎡322(z−)18⎤⎡Tz⎤⎢22⎥⎡−1⎤⎢22⎥⎢(z−)12⎥=64⎢z−64z+1564z−64z+15⎥⎢⎥+64⎢z−64z+1564z−64z+15⎥⎢⎥⎢8z32z2(z−)1⎥⎣3⎦⎢8322(z−)1⎥⎢z⎥64⎢⎣z2−64z+1564z2−64z+15⎥⎦64⎢⎣z2−64z+1564z2−64z+15⎥⎦⎢(z−e−T)⎥⎣⎦⎡1⎤⎡−2zz⎤⎢(z−)5.0Tz8z⎥⎢+⎥⎢2+−T⎥⎢z−3z−5⎥⎢(z−3)(z−5)(z−)1(z−3)(z−5)(z−e)⎥khdaw.com=⎢88⎥+⎢8888⎥⎢2zz⎥⎢1⎥⎢+⎥⎢⎥358Tz(z−)5.0z⎢z−z−⎥⎢+⎥⎣88⎦⎢35(z−)1235(z−e−T)⎥(z−)(z−)(z−)(z−)⎢⎥⎣8888⎦=第一部分+第二部分第二部分为:⎡32Tz32Tz32Tz1088Tz⎤++−⋯⎢2539515(z−)12225z−1⎥⎢z−z−⎥⎢88⎥⎢5.0z5.0zz⎥⎢+++⎥⎢(z−3)(3−e−T)(z−5)(5−e−T)(8z−e−T)(3−e−T)(5−e−T)⎥⎢888888⎥⎢32Tz32Tz8Tz512Tz⎥⎢−++−⋯⎥2539515(z−)12225z−1⎢z−z−⎥⎢88⎥⎢−T⎥5.0z5.0z5.0(−e)z⎢++−⎥⎢33−T55−T−T3−T5−T⎥⎢(z−)(−e)(z−)(−e)(z−e)(−e)(−e)⎥⎣888888⎦(xkT)=Z[X(z)]所以第一部分的Z反变换为:⎡5k3k⎤()−(2)⎢⎥88x(1kT)=⎢⎥5k3k⎢()+(2)⎥⎣88⎦所以第二部分的Z反变换为:khdaw.com29若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡⎡⎤⎡⎤⎤⎢⎢325.0⎥3k⎢325.0⎥5k32⎥⎢⎢T−⎥()+⎢T+⎥()+kT⋯⎥⎢⎢253−T⎥8⎢95−T⎥815⎥−e−e⎢⎢⎣8⎥⎦⎢⎣8⎥⎦⎥⎢⎥−kT⎢1088e⎥−T+⎢2253−T5−T⎥⎢(8−e)(−e)⎥x(2kT)=⎢88⎥⎢⎡⎤⎡⎤⎥⎢⎢325.0⎥3k⎢325.0⎥5k8⎥⎢⎢−T−⎥()+⎢T+⎥()+kT⋯⎥⎢⎢253−e−T⎥8⎢95−e−T⎥815⎥⎢⎢⎣8⎥⎦⎢⎣8⎥⎦⎥⎢⎥−T−kT⎢5125.0(−e)e⎥−T+⎢2253−T5−T⎥⎢(−e)(−e)⎥khdaw.com⎣88⎦(xkT)=x(1kT)+x(2kT)(ykT)=Cx(kT)=1[1x](kT)⎡⎤⎡⎤⎢1⎥3⎢641⎥5401600.0(625−e−T)e−kTkky(kT)=⎢−⎥()+⎢T+⎥()+kT−T+⎢3−T⎥8⎢95−T⎥8152253−T5−T−e−e(−e)(−e)⎢⎣8⎥⎦⎢⎣8⎥⎦88方法二:利用递推算法求解差分方程组:k=0⎡11⎤⎡11⎤⎡1⎤−⎡x1[T]⎤⎢28⎥⎡x1)0(⎤⎡10⎤⎡u1)0(⎤⎢28⎥⎡−1⎤⎡10⎤⎡0⎤⎢8⎥⎢⎥=⎢⎥⎢⎥+⎢⎥⎢⎥=⎢⎥⎢⎥+⎢⎥⎢⎥=⎢⎥⎣x2[T]⎦⎢11⎥⎣x2)0(⎦⎣01⎦⎣u20()]⎦⎢11⎥⎣3⎦⎣01⎦⎣1⎦⎢19⎥⎣82⎦⎣82⎦⎣8⎦⎡1⎤−[⎡]x1)0(⎤⎡[−1⎤][⎡]x1(T)⎤⎢[8⎥]9y)0(=11⎢⎥=11⎢⎥=2;y(T)=11⎢⎥=11⎢⎥=⎣x20()]⎦⎣3⎦⎣x2(T)]⎦⎢19⎥4⎣8⎦特征方程为:zI−A=z(−.0375)(z−.0625)=0特征值为:z=.0375,z=.0625。12⎡−11⎤−1⎡−5.05.0⎤P=⎢⎥,P=⎢⎥⎣11⎦⎣5.05.0⎦khdaw.com30若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡.0375k0⎤−1Φ(k)=P⎢⎥Pk⎢⎣0.0625⎥⎦⎡5.0×.0375k+5.0×.0625k−5.0×.0375k+5.0×.0625k⎤Φ(k)=⎢⎥kkkk5.0⎢⎣−.0375×5.0+.0625×5.0×.0375+5.0×.0625⎥⎦1-k利用x(k)=Φ(k)x(0)+∑Φ(k-j-1)Hu(j)j=0得:⎡-0.1250⎤x(T)=⎢⎥khdaw.com⎣2.3750⎦⎡15/64+T⎤x2(T)=⎢-T⎥⎣75/64+e⎦⎡135/512+5/2*T+1/8*e-T⎤x3(T)=⎢⎥-T-2T⎢⎣315/512+1/8*T+1/2*e+e⎥⎦⎡855/4096+273/64*T+1/8*e-T+1/8*e-2T⎤x4(T)=⎢⎥-T-2T-3T⎢⎣1395/4096+3/8*T+17/64*e+1/2*e+e⎥⎦x5(T)=⋯⎡x1(kT)⎤(ykT)=[11⎢]⎥x(kT)]⎣2⎦y(T)=.225-Ty2(T)=90/64+T+e-T-2Ty3(T)=450/512+2.625T+0.625e+e-T-2T-3Ty4(T)=2250/4096+4.6406T+0.3906e+0.625e+ey5(T)=⋯3-2-10已知连续系统的状态方程为:⎡x1[(k+)1T]⎤⎡100⎤⎡x1(kT)⎤⎡1⎤⎢x[(k+)1T]⎥=⎢02−2⎥⎢x2(kT)⎥+⎢0⎥u(kT)⎢2⎥⎢⎥⎢⎥⎢⎥⎢⎣x3[(k+)1T]⎥⎦⎢⎣−110⎥⎦⎢⎣x3(kT)⎥⎦⎢⎣−1⎥⎦khdaw.com31若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡x1)0(⎤⎡1⎤系统的初始状态为⎢x2)0(⎥=⎢0⎥⎢⎥⎢⎥⎢⎣x3)0(⎥⎦⎣2⎦试求当控制序列为(ukT)=2kT(T=1秒)时离散系统的状态x(kT)。【解】:利用递推算法求解差分方程组:k⎡100⎤k⎢⎥Φ(k)=G=02−2⎢⎥⎢⎣−110⎥⎦khdaw.com⎡100⎤⎡100⎤1⎢⎥2⎢⎥Φ)1(=G=02−2,Φ)2(=G=22−4⎢⎥⎢⎥⎢⎣−110⎥⎦⎢⎣−12−2⎥⎦⎡100⎤⎡100⎤3⎢⎥4⎢⎥Φ)3(=G=60−4,Φ)4(=G=10−40⎢⎥⎢⎥1⎢⎣2−4⎥⎦⎢⎣50−4⎥⎦⎡1⎤⎢⎥)1(x=Φ)1(x)0(+Φ)0(Hu)0(=−4⎢⎥⎢⎣−1⎥⎦⎡3⎤⎢⎥)2(x=Φ)2()0(x+Φ)1(Hu)0(+Φ)0(Hu)1(=−6⎢⎥⎢⎣−7⎥⎦⎡7⎤⎢⎥)3(x=)3(Φ)0(x+Φ)2(Hu)0(+Φ)1(Hu)1(+Φ)0(Hu)2(=2⎢⎥⎢⎣−13⎥⎦⎡13⎤⎢⎥)4(x)4(=Φ)0(x+)3(ΦHu)0(+Φ)2(Hu)1(+Φ)1(Hu)2(+Φ)0(Hu)3(=30⎢⎥⎢⎣−11⎥⎦x)5(=⋯3-2-11已知离散系统的结构图如题3-2-11图所示,khdaw.com32若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解Trt)(1−e−Ts1ct)(s(s+1)(s+2)题3-2-11图(1)求系统离散化的状态空间表达式;(2)当采样周期T=1.0秒时,输入为单位阶跃函数,且初始条件为零时离散系统的输出y(kT)。【解】:方法一:①依据方框图求闭环脉冲传递函数:khdaw.com−1⎡1⎤G开(z)=(1−z)Z⎢⎥⎣s(s+1)(s+2)⎦−1⎡5.015.0⎤G(z)=(1−z)Z−+开⎢ss+1s+2⎥⎣⎦−15.0zz5.0zG(z)=(1−z)(−+)开z−1−T−2Tz−ez−e5.015.0G(z)=(z−1)(−+)开−1−T−2Tzz−ez−eC(z)G(z)1(5.0−e−)T2z+5.0e−T1(−e−T)2开==R(z)1+G开(z)z2+1(5.0−4e−T−e−)2Tz+5.0e−T1(−2e−T+3e−2T)⎡x1[(k+)1T]⎤⎡01⎤⎡x1(kT)⎤⎡0⎤⎢⎥=⎢−T−T−2T−T−2T⎥⎢⎥+⎢⎥r(kT)⎣x2[(k+)1T]⎦⎣5.0−e1(2−e3+e)−1(5.0−4e−e)⎦⎣x2(kT)⎦⎣1⎦−T−T2−T2⎡x1(kT)⎤(y)kT=5.0[e1(−e)1(5.0−e)]⎢⎥x(kT)⎣2⎦当采样周期T=1.0秒时C(z)G开(z).00046z+.00041==R(z)1+G(z)2开z−.17190z+.07448②依据闭环脉冲传递函数写出状态空间表达式:khdaw.com33若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解⎡x1[(k+)1T]⎤⎡01⎤⎡x1(kT)⎤⎡0⎤⎢⎥=⎢⎥⎢⎥+⎢⎥r(kT)⎣x2[(k+)1T]⎦⎣−.07448.17190⎦⎣x2(kT)]⎦⎣1⎦[]⎡x1(kT)⎤(ykT)=.00041.00046⎢⎥,⎣x2(kT)]⎦③求零初始条件下单位阶跃输入的输出y(kT)。kk⎡01⎤Φ(k)=G=⎢⎥⎣−.07448.17190⎦1⎡01⎤Φ)1(=G=⎢⎥⎣−.07448.17190⎦2⎡−.07448.17190⎤khdaw.comΦ)2(=G=⎢⎥⎣−.12803.22102⎦3⎡−.12803.22102⎤Φ)3(=G=⎢⎥⎣−.16461.25190⎦4⎡−.16461.25190⎤Φ)4(=G=⎢⎥⎣−.18761.26840⎦k−1()xk=(Φ)kx)0(+∑Φ(k−j−)1Hu(j)j=0又因为输入为单位阶跃函数,且初始条件为零,所以k−1(x)k=∑Φ(k−j−)1Hj=0⎡0⎤⎡0⎤x)1(=Φ)0(⎢⎥=⎢⎥⎣1⎦⎣1⎦⎡1⎤x)2(=Φ)1(H+Φ)0(H=⎢⎥⎣.27190⎦⎡.27190⎤x)3(=Φ)2(H+Φ)1(H+Φ)0(H=⎢⎥⎣.49292⎦⎡.49292⎤x)4(=Φ)3(H+Φ)2(H+Φ)1(H+Φ)0(H=⎢⎥⎣.74482⎦x)5(=⋯(y)k=Cx(k)+Du(k)()yk=(Cx)k=.0[0041.00046]x(k))1(y=Cx)1(=.00041[.00046]x)1(=.00046)2(y=Cx)2(.0=0041[.00046]x)2(=.00166)3(y=Cx)3(=.00041[.00046]x)3(=.00388)4(y=Cx)4(.0=0041[.00046]x)4(=khdaw.com.0054534若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解方法二:系统中连续时间被控对象的传递函数为:111G(s)==−(s+1)(s+2)(s+1)(s+2)系统中连续时间被控对象的状态空间表达式为:⎡−10⎤⎡1⎤ẋ=⎢⎥x+⎢⎥u⎣0−2⎦⎣1⎦y=[1−1x]状态转移矩阵为:⎡1⎤⎧⎡s+10⎤−1⎫⎢0⎥−1−1−1⎪⎪(s+)1khdaw.comΦ()t=L[(sI−A)]=L⎨⎢⎥⎬=⎢1⎥⎪⎣0s+2⎦⎪⎭⎢0⎥⎩⎢⎣(s+)2⎥⎦⎡e−t0⎤=⎢⎥(对角标准型也可直接写)−2t⎢⎣0e⎥⎦⎡e−T0⎤ATG(T)=e=⎢⎥−2T⎢⎣0e⎥⎦TT⎡e−t0⎤⎡1⎤⎡1−e−T⎤AtH(T)=∫eBdt=∫⎢−2t⎥⎢⎥dt=⎢−2T⎥00⎢⎣0e⎥⎦⎣1⎦⎢⎣5.0−5.0e⎥⎦故被控对象的离散化状态方程为:[(xk)1+]T=(G)T(xkT)+H(T)u(kT)⎡x[(k+)1T]⎤⎡e−T0⎤⎡x(kT)⎤⎡1−e−T⎤11⎢⎥=⎢−2T⎥⎢⎥+⎢−2T⎥u(kT)⎣x2[(k+)1T]⎦⎢⎣0e⎥⎦⎣x2(kT)]⎦⎢⎣5.0−5.0e⎥⎦根据系统结构图,系统输入量为r(t),输出为y(t),而被控对象的输入()ut=()rt−(y)t=(r)t−x(t)+x(t),所以系统的离散化方程为:12⎡x[(k+)1T]⎤⎡e−T0⎤⎡x(kT)⎤⎡1−e−T⎤11[]⎢⎥=⎢−2T⎥⎢⎥+⎢−2T⎥(rkT)−x(1kT)+x2(kT)⎣x2[(k+)1T]⎦⎢⎣0e⎥⎦⎣x2(kT)]⎦⎢⎣5.0−5.0e⎥⎦⎡x[(k+)1T]⎤⎡2e−T−11−e−T⎤⎡x(kT)⎤11⎢⎥=⎢−2T−2T⎥⎢⎥⎣x2[(k+)1T]⎦⎢⎣−5.0+5.0e5.0+5.0e⎥⎦⎣x2(kT)]⎦⎡1−e−T⎤+⎢⎥r(kT)−2T⎢⎣5.0−5.0e⎥⎦系统输出方程为:khdaw.com35若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第二章状态空间表达式的解[⎡]x1(kT)⎤(ykT)=1−1⎢⎥⎣x2(kT)]⎦令T=1.0秒,离散化状态方程为:⎡x[(1k+)1T]⎤⎡.08097.00952⎤⎡x1(kT)⎤⎢⎥=⎢⎥⎢⎥⎣x2[(k+)1T]⎦⎣−.00906.09094⎦⎣x2(kT)]⎦⎡.00952⎤+⎢⎥r(kT)⎣.00906⎦[⎡]x1(kT)⎤(ykT)=1−1⎢⎥⎣x2(kT)]⎦当输入为单位阶跃函数,初始条件为零时离散系统的输出为:khdaw.com−1−1y(k)=CZ[(zI−G)Hu(z)]+Du(k)−1−1(y)k=CZ[(zI−G)Hu(z)]可得。k−1或与方法一一样,利用()xk=(Φ)kx)0(+∑Φ(k−j−)1Hu(j)j=0一步一步地求。0⎡1(5−e−5t)⎤⎡5⎤3-2-12线性时变系统的状态方程为ẋ=⎢−5t⎥x+⎢⎥u,求采样周期T=0.2秒时,⎢⎣05e⎥⎦⎣0⎦系统的离散化方程。【解】:由于采样周期较小,可以采用近似离散化的方法。0⎡1(5−e−k)⎤⎡10⎤⎡11−e−k⎤(GkT)=TA(kT)+I=2.0⎢−k⎥+⎢⎥=⎢−k⎥⎢⎣05e⎥⎦⎣01⎦⎢⎣01+e⎥⎦⎡5⎤⎡1⎤(HkT)=TB(kT)=2.0⎢⎥=⎢⎥⎣0⎦⎣0⎦((x)1k))+T=(2.0(x1))k+=G2.0()kx2.0()k+H2.0(k)u2.0(k)⎡11−e−k⎤⎡1⎤((xk+2.0)1))=⎢−k⎥x2.0(k)+⎢⎥u2.0(k)⎢⎣01+e⎥⎦⎣0⎦khdaw.com36若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性第三章线性控制系统的能控性和能观性3-3-1判断下列系统的状态能控性。⎡010⎤⎡10⎤⎡10⎤⎡1⎤⎢⎥⎢⎥(1)A=⎢⎥,B=⎢⎥(2)A=⎢001⎥,B=⎢01⎥⎣−10⎦⎣0⎦⎢⎣−2−4−3⎥⎦⎢⎣−11⎥⎦⎡λ1100⎤⎡0⎤⎡−310⎤⎡1−1⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢0λ100⎥⎢1⎥(3)A=0−30,B=00(4)A=,B=⎢⎥⎢⎥⎢00λ10⎥⎢1⎥⎢⎣00−1⎥⎦⎢⎣20⎥⎦⎢⎥⎢⎥⎣000λ1⎦⎣1⎦【解】:khdaw.com(1)⎡11⎤Uc=[BAB=]⎢⎥,rankUc=n=2,所以系统完全能控。⎣0−1⎦(2)⎡1001⎤[2]⎢⎥Uc=BABAB=⎢01−11⋯⎥⎢⎣−111−7⎥⎦前三列已经可使rankU=n=3,所以系统完全能控(后续列元素不必计算)。c(3)A为约旦标准型,且第一个约旦块对应的B阵最后一行元素全为零,所以系统不完全能控。(4)A阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。可以求一下能控判别阵。0⎡12λ3λ2⎤11⎢⎥23U=[BABA2BA3B]=⎢1λ1λ1λ1⎥,rankU=2,所以系统不完全能控。c⎢23⎥c1λ1λ1λ1⎢⎥23⎢⎣1λ1λ1λ1⎥⎦3-3-2判断下列系统的输出能控性。khdaw.com44若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性⎧⎡−310⎤⎡1−1⎤⎪⎢⎥⎢⎥⎧⎡010⎤⎡0⎤⎪ẋ=⎢0−30⎥x+⎢00⎥u⎪⎢⎥⎢⎥⎪⎪ẋ=⎢001⎥x+⎢0⎥u(1)⎨⎢⎣00−1⎥⎦⎢⎣20⎥⎦(2)⎨⎪⎪⎢⎣−6−11−6⎥⎦⎢⎣1⎥⎦⎡101⎤⎪y=⎢⎥x⎪⎩y=1[00x]⎪⎩⎣−110⎦【解】:(1)⎡−310⎤⎡1−1⎤⎢⎥⎢⎥⎡101⎤⎡00⎤已知A=⎢0−30⎥,B=⎢00⎥,C=⎢⎥,D=⎢⎥⎣−110⎦⎣00⎦⎢⎣00−1⎥⎦⎢⎣20⎥⎦[Dkhdaw.comCBCABCA2B]=⎡⎢00003−1−11⋯⋯⎤⎥⎣⎦前两列已经使[2]2rankDCBCABCAB=m=,所以系统输出能控。(2)系统为能控标准型,所以状态完全能控。又因输出矩阵C满秩,且输出维数m小于状态维数n,所以状态能控则输出必然能控。2-3-3判断下列系统的能观性。⎧⎡010⎤⎪⎢⎥⎪ẋ=⎢001⎥x⎧⎡11⎤⎪⎢⎥⎪ẋ=⎢⎥x(1)⎨⎣−2−4−3⎦;(2)⎨⎣10⎦;⎪⎪⎪0⎡1−1⎤⎩y=[11x]y=⎢⎥x⎪⎩⎣121⎦⎧⎡210⎤⎧⎡−400⎤⎪⎢⎥⎪⎢⎥⎪ẋ=⎢020⎥x⎪ẋ=⎢0−40⎥x(3)⎨;(4)⎨⎪0⎢⎣0−3⎥⎦⎪⎢⎣001⎥⎦⎪⎩y=0[11x]⎪⎩y=1[14x]【解】:(1)⎡010⎤⎢⎥0⎡1−1⎤已知A=⎢001⎥,C=⎢⎥⎣121⎦⎢⎣−2−4−3⎥⎦khdaw.com45若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性⎡01−1⎤⎢⎥121⎡C⎤⎢⎥⎢⎥⎢244⎥V0=⎢CA⎥=⎢⎥2⎢⋮⎥⎢⎣CA⎥⎦⎢⎥⎢⎥⎢⎣⎥⎦前三行已使rankV=n=3,0所以系统完全能观(后续元素不必计算)。(2)⎡11⎤A=⎢⎥,C=[11]⎣10⎦⎡C⎤⎡11⎤khdaw.comV0=⎢⎥=⎢⎥,rankV0=n=2⎣CA⎦⎣21⎦所以系统完全能观。(3)状态空间表达式为约旦标准型,且C阵对应于第一个约旦块的第一列元素为零,所以系统状态不完全能观。(4)状态空间表达式为约旦标准型的特殊结构形式,所以不能用常规方法判系统的能观性。同一特征值对应着多个约旦块,只要是单输出系统,一定是不完全能观的。也可求⎡C⎤⎡114⎤⎢⎥⎢⎥V0=⎢CA⎥=⎢−4−44⎥,V0=,0rankV0=2⎢2⎥⎢⎥⎣CA⎦⎣16164⎦所以系统不完全能观。3-3-4设系统状态方程为ẋ=Ax+Bu,若x、x是系统的能控状态,试证状态αx+βx1212也是能控的(其中α、β为任意常数)。【解】:设:y=Cx=[αβx]因为,状态x和x能控,所以至少有12[n−1]rankBAB⋯AB=2。而由系统输出能控的判别阵得:[2][n−1]rankCBCABCAB=rank(CBAB⋯AB)=1,(C阵又满秩)。所以y=Cx=[αβx一定是能控的。]khdaw.com46若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性3-3-5设系统∑1和∑2的状态空间表达式为⎧⎡01⎤⎡0⎤⎪ẋ1=⎢⎥x1+⎢⎥u1⎧ẋ2=−2x2+u2∑1:⎨⎣−3−4⎦⎣1⎦∑2:⎨⎪⎩y2=x2⎩y1=[21x]1(1)试分析系统∑1和∑2的能控性和能观性,并写出传递函数;(2)试分析由∑1和∑2组成的串联系统的能控性和能观性,并写出传递函数;(3)试分析由∑1和∑2组成的并联系统的能控性和能观性,并写出传递函数。【解】:(1)⎡01⎤⎡21⎤khdaw.com∑1:Uc=⎢⎥,rankUc=2;Vo=⎢⎥,rankVo=2⎣1−4⎦⎣−3−2⎦⎧ẋ2=−2x2+u2∑2:⎨⎩y2=x2两个子系统既能控又能观。(2)以系统1在前系统2在后构成串联系统为例(串联顺序变化状态空间表达式不同,又都是SISO系统,传递函数相同):系统有下关系成立:u=u,u=y,y=y1212⎡x1⎤x=⎢⎥⎣x2⎦⎡010⎤⎡0⎤⎡A10⎤⎡b1⎤⎢⎥⎢⎥ẋ=⎢⎥x+⎢⎥u=⎢−3−40⎥x+⎢1⎥u⎣b2C1A2⎦⎣0⎦⎢⎣21−2⎥⎦⎢⎣0⎥⎦y=[0C2x]=0[01x]⎡01−4⎤2⎢⎥Uc=[bAbAb=⎢1−4]13⎥,rankUc=2;⎢⎣01−4⎥⎦⎡C⎤⎡001⎤⎢⎥⎢⎥Vo=⎢CA⎥=⎢21−2⎥,rankVo=3⎢CA2⎥⎢⎣−7−44⎥⎦⎣⎦串联后的系统不能控但能观。khdaw.com47若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性传递函数为:−1−1G(s)=G(s)G(s)=C(sI−A)bC(sI−A)b21222111−1−1[⎡]s−1⎤⎡0⎤s+21=1[(×s+)2×]1×21⎢⎥⎢⎥=2=2⎣3s+4⎦⎣1⎦(s+4s+3)(s+)2(s+4s+)3(3)并联后的系统数学模型为:系统有下关系成立:u=u=u,y=y+y1212并联后的状态空间表达式为:⎡010⎤⎡0⎤⎡A10⎤⎡b1⎤⎢⎥⎢⎥khdaw.comẋ=⎢⎥x+⎢⎥u=⎢−3−40⎥x+⎢1⎥u0Ab⎣2⎦⎣2⎦⎢⎥⎢⎥⎣00−2⎦⎣1⎦y=[C1C2x=]21[1x]0⎡1−4⎤[2⎢]⎥Uc=bAbAb=1⎢−413⎥,rankUc=3;1⎢⎣−24⎥⎦⎡C⎤⎡211⎤⎢⎥⎢⎥Vo=⎢CA⎥=⎢−3−2−2⎥,rankVo=3⎢CA2⎥⎢⎣654⎥⎦⎣⎦并联后系统既能控又能观。传递函数为:−1−1(G)s=G(1)s+G(2)s=C1(sI−A1)b1+C2(sI−A2)b2−12[⎡]s−1⎤⎡0⎤−1s+212s+8s+7=21⎢⎥⎢⎥+1[×(s+)2×]1=2+=32⎣3s+4⎦⎣1⎦(s+4s+)3s+2s+6s+11s+6s+a3-3-6已知系统的传递函数为G(s)=32s+10s+27s+18(1)试确定a的取值,使系统成为不能控或为不能观;(2)在上述a的取值下,求使系统为能控的状态空间表达式;(3)在上述a的取值下,求使系统为能观的状态空间表达式。【解】:系统的传递函数可以写成:khdaw.com48若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性s+as+aG(s)==s3+10s2+27s+18s(+3)(s+1)(s+)6(1)当a=1,3,6时,系统传递函数出现零极点对消现象,则系统可能不能控,或不能观或即不能控又不能观。(2)在上述a的取值下,求使系统为能控的状态空间表达式;能控标准型为:⎧⎡010⎤⎡0⎤⎪⎢⎥⎢⎥⎪ẋ=⎢001⎥x+⎢0⎥u⎨⎪⎢⎣18−−27−10⎥⎦⎢⎣1⎥⎦⎪y=[a10x]khdaw.com⎩(3)在上述a的取值下,求使系统为能观的状态空间表达式。能观标准型为:⎧0⎡0−18⎤⎡a⎤⎪⎢⎥⎢⎥⎪ẋ=1⎢0−27⎥x+⎢1⎥u⎨⎪0⎢⎣1−10⎥⎦⎢⎣0⎥⎦⎪y=0[01x]⎩3-3-7已知系统的状态空间表达式为⎧⎡λ10⎤⎡a⎤⎪⎢⎥⎢⎥⎪ẋ=⎢0λ0⎥x+⎢b⎥u⎨⎪⎢⎣00λ⎥⎦⎢⎣c⎥⎦⎪y=[abcx]⎩试问能否选择常数a、b、c使系统具有能控性和能观性。【解】:⎡aλa+bλa2+2bλ⎤⎢⎥2Uc=⎢bbλbλ⎥⎢ccλcλ2⎥⎣⎦在上述行列式中,无论a、b、c如何取值,都有两行元素线性相关,则Uc=0,rankU=2。ckhdaw.com49若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性⎡abc⎤⎢⎥V0=⎢aλa+λbcλ⎥λ⎢a22λa+λb2cλ2⎥⎣⎦在上述行列式中,无论a、b、c如何取值,都有两列元素线性相关,则V0=0,rankV=2。0所以,无论常数a、b、c取何值,系统都不能控和不能观。3-3-8系统的结构如题3-3-8图所示,图中a、b、c、d均为实常数,试建立系统的状态空间表达式,并分别确定当系统状态能控和能观时a、b、c、d应满足的条件。khdaw.comut)(x2t)(x1(t)cy(t)bad题3-3-8图【解】:系统状态空间表达式为:⎧ẋ1=−ax1+cx2+u⎧⎡−ac⎤⎡1⎤⎪⎪ẋ=⎢⎥x+⎢⎥u⎨ẋ2=−dx1−bx2+u⇒⎨⎣−d−b⎦⎣1⎦⎪⎪⎩y=x1⎩y=1[0x]系统能控的条件为:⎡1−a+c⎤Uc=[bAb=]⎢⎥Uc=−d−b+a−c≠0。⎣1−d−b⎦系统能观的条件为:⎡c⎤⎡10⎤V=⎥=⎥,V=c≠0。0⎢⎢o⎣cA⎦⎣−ac⎦3-3-9设系统∑(A,C)的系数矩阵为⎡−a1−a2−a3⎤⎢⎥A=⎢100⎥,C=[c100]⎢⎣010⎥⎦khdaw.com50若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性其中a,a,a,c为实数。试问系统(A,C)能观的充要条件是什么?要求用A、C中的参1231∑数具体表示。【解】:⎡C⎤⎡c100⎤⎡100⎤⎢⎥⎢⎥3⎢⎥V0=⎢CA⎥=⎢−a1c1−a2c1−a3c1⎥=c1⎢−a1−a2−a3⎥⎢2⎥⎢a2c−acaac−acaac⎥⎢a2−aaa−aaa⎥⎣CA⎦⎣112112131131⎦⎣1212313⎦32V=−ca≠0⇒c≠,0a≠.0013133-3-10已知系统的状态空间表达式为⎧⎡01⎤⎡b1⎤⎪ẋ=⎢khdaw.com⎥x+⎢⎥u−2−3b⎨⎣⎦⎣2⎦⎪[]⎩y=c1c2x欲使系统中有一个状态既能控又能观,另一个状态既不能控又不能观,试确定参数b,b,c,c应满足的关系。1212【解】:2fλ()=λI−A=λ3+λ2+=,0λ1=−,1λ2=−2A为友矩阵,且特征值互异,所以⎡11⎤⎡11⎤−1⎡21⎤P=[P1P2=]⎢⎥=⎢⎥,P=⎢⎥λ⎣1λ2⎦⎣−1−2⎦⎣−1−1⎦x=Px⎧̇⎡−10⎤⎡2b1+b2⎤⎪x=⎢⎥x+⎢⎥u⎨⎣0−2⎦⎣−b1−b2⎦⎪⎩y=[c1−c2c1−2c2]x显然,当状态x2既能控又能观,而状态x1既不能控又不能观的条件是:⎧c1−c2=,0c1−2c2≠0⎧c1=c2≠0⎨⇒⎨⎩2b1+b2=,0−b2−b1≠0⎩b2=−2b1≠0当状态x既能控又能观,而状态x既不能控又不能观的条件是:12⎧c1−2c2=,0c1−c2≠0⎧c1=2c2≠0⎨⇒⎨⎩−b2−b1=2,0b1+b2≠0⎩b2=−b1≠0khdaw.com51若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性⎧ẋ=Ax+bu3-3-11设n阶系统的状态空间表达式为⎨,试证:⎩y=Cx2n-1(1)若Cb=0,CAb=0,CAb=0,……CAb=0,则系统不能同时满足能控性和能观性条件。2n-2n-1(2)如果满足Cb=0,CAb=0,CAb=0,……CAb=0,CAb≠0则系统总是又能控又能观的。【解】:(1)以三阶系统为例:⎡C⎤⎡CbCAbCA2b⎤0⎡00⎤⎢⎥[2]⎢23⎥⎢3⎥V0×Uc=⎢CA⎥×bAbAb=⎢CAbCAbCAb⎥=⎢00CAb⎥⎢2⎥⎢CA2bCA3bCA4b⎥⎢0CA3bCA4b⎥⎣CA⎦⎣⎦⎣⎦khdaw.comV0×Uc=,0V0×Uc=0所以该系统不能同时满足能控性和能观性条件。(2)以三阶系统为例:⎡C⎤⎡CbCAbCA2b⎤⎡00k⎤⎢⎥2⎢23⎥⎢3⎥V0×Uc=⎢CA⎥×[bAbAb]=⎢CAbCAbCAb⎥=⎢0kCAb⎥⎢2⎥⎢CA2bCA3bCA4b⎥⎢kCA3bCA4b⎥⎣CA⎦⎣⎦⎣⎦V×U=k3=(CA2b)3≠0⇒V≠,0U≠,00c0c所以该系统既能控又能观。3-3-12已知系统的微分方程为ẏ̇̇+6ẏ̇+11ẏ+6y=6u,试写出对偶系统的状态空间表达式及其传递函数。【解】:TT−1T−1TT因为G对偶(s)=b(sI−A)C=[C(sI−A)b]=G原系统(s)又因为单输入/单输出系统传递函数矩阵为一个元素,所以二者传递函数是相同的。6G(s)=s3+6s2+11s+6系统传递函数无零点,所以不会出现零极点对消现象,系统既能控又能观。能控标准型为:⎧⎡010⎤⎡0⎤⎪⎢⎥⎢⎥⎪ẋ=⎢001⎥x+⎢0⎥u⎨⎪⎢⎣−6−11−6⎥⎦⎢⎣1⎥⎦⎪y=6[00x]⎩khdaw.com52若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第三章线性控制系统的能控性和能观性能观标准型为:⎧0⎡0−6⎤⎡6⎤⎪⎢⎥⎢⎥⎪ẋ=1⎢0−11⎥x+⎢0⎥u⎨⎪0⎢⎣1−6⎥⎦⎢⎣0⎥⎦⎪⎩y=0[01x]⎡−10⎤⎡1⎤3-3-13已知系统的状态方程为ẋ=⎢⎥x+⎢⎥u,试求出它的能控标准型。⎣1−2⎦⎣1⎦【解】:⎡1−1⎤Uc=[bAb=]⎢⎥,rankUc=1,0=3>,014−3=−4<0⎢⎥14⎢⎣−1−31⎥⎦−1−31二次型函数不定。(2)⎡−130⎤−130⎢⎥−13P=3−101,⇒−1<,0=1>,03−101=−3<0⎢⎥3−10⎢⎣01−4⎥⎦01−4二次型函数为负定。(3)⎡101−2⎤101−2⎢⎥101P=14−1,⇒10>,0=39>014−1=17>0⎢⎥14⎢⎣−2−11⎥⎦−2−11二次型函数正定。3-4-2试确定下列二次型为正定时,待定常数的取值范围。222v(x)=ax+bx+cx+2xx−4xx−2xx111213123213【解】:222v(x)=ax+bx+cx+2xx−4xx−2xx111213123213⎡a11−1⎤T⎢⎥=x⎢1b1−2⎥x⎢⎣−1−2c1⎥⎦khdaw.com70若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性a11−1a11a1>,0>,01b1−2>01b1−1−2c1满足正定的条件为:⎧a1>0⎪⎨a1b1>1⎪⎩a1b1c1+4>b1+4a1+c13-4-3试用李亚普诺夫第二法判断下列线性系统的稳定性。⎡01⎤⎡−11⎤)1(ẋkhdaw.com=⎢⎥x;)2(ẋ=⎢⎥x;⎣−1−1⎦⎣2−3⎦⎡−11⎤⎡10⎤)3(ẋ=⎢⎥x;)4(ẋ=⎢⎥x;⎣−1−1⎦⎣0−1⎦【解】:(1)设22(v)x=5.0x+5.0x1222⎧=0(x=)0v̇(x)=x1̇x1+x2ẋ2=x1x2−x1x2−x2=−x2⎨为半负定。⎩≤0(x≠)0又因为v̇(x)≡0时,有x≡0,2则ẋ≡0,代入状态方程得:x≡0.21所以系统在x≠0时,v̇(x)不恒为零。则系统渐近稳定,又因为是线性系统,所以该系统是大范围渐近稳定。(2)设22(v)x=5.0x+5.0x1222v̇(x)=x1̇x1+x2ẋ2(=x1−x1+)x2+x2(2x13−x)2=−x1−3x2+3x1x2T⎡−15.1⎤−15.1=x⎢⎥x⇒−1<,0>0⎣5.1−3⎦5.1−3T=xPxP负定,系统渐近稳定,又因为是线性系统,所以该系统是大范围渐近稳定。(3)khdaw.com71若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性设22(v)x=5.0x+5.0x1222v̇(x)=x1̇x1+x2ẋ2=(x1−x1+x)2+x2(−x1−x2)=−x1−x2T⎡−10⎤=x⎢⎥x⎣0−1⎦T=xPxP负定,系统渐近稳定,又因为是线性系统,所以该系统是大范围渐近稳定。(4)两个状态变量相互独立,所以可以单独分析各变量的稳定性。22⎧≥0(x≠0)khdaw.comẋ1=x1v(x1)=5.0x1⇒̇v(x1)=x1ẋ1=x1⎨()⎩=0x=022⎧≤0(x≠0)ẋ2=−x2v(x2)=5.0x2⇒v̇(x2)=x2ẋ2=−x2⎨()⎩=0x=0所以系统不稳定。3-4-4试确定下列系统平衡状态的稳定性。⎡130⎤⎢⎥x(k+)1=−3−2−3x(k)⎢⎥⎢⎣100⎥⎦【解】:方法一:采用第一方法,确定特征多项式对应的特征值是否在单位圆内。z−1−30f(z)=zI−A=3z+23=0−10zz1=0.1173+2.6974iz=0.1173-2.6974i2z3=−1.2346特征多项式对应的特征值均在单位圆外,所以系统不稳定。方法二:采用第二方法,⎡130⎤⎢⎥G=−3−2−3。⎢⎥⎢⎣100⎥⎦khdaw.com72若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性设⎡15.05.0⎤⎢⎥P=5.010⎢⎥⎢⎣5.001⎥⎦15.05.015.0因为1>0,=.075>0,5.010=5.0>0,所以P正定。5.015.001Tv(x)=xPx正定。TTkhdaw.com∆v(k)=x(k)(GPG−P)x(k)1⎡−31⎤⎡15.05.0⎤⎡130⎤⎡130⎤T⎢⎥⎢⎥⎢⎥⎢⎥GPG−P=3−205.010−3−2−3−−3−2−3⎢⎥⎢⎥⎢⎥⎢⎥0⎢⎣−30⎥⎦⎢⎣5.001⎥⎦⎢⎣100⎥⎦⎢⎣100⎥⎦⎡85.47⎤⎢⎥=5.465.1⎢⎥⎢⎣75.18⎥⎦85.4785.4因为8>0,=27.75>0,5.465.1=5.4>0,所以P正定。5.4675.18∆v(k)为正定,所以系统在原点不稳定。⎡⎤010⎢⎥3-4-5设离散系统状态方程为x(k+)1=⎢001⎥x(k)k>0,求平衡点xe=0渐近稳⎢k⎥⎢00⎥⎣2⎦定时k值范围。【解】:方法一:采用第一方法,确定特征多项式对应的特征值是否在单位圆内。z−10f(z)=zI−A=0z−1=00−k/2zkhdaw.com73若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性z1=0.52kz=-0.52k2z3=00.5±2k<1⇒00⎪⎪2P为正定,则⎨4−k⇒00⎪⎩4−k2khdaw.com74若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性⎡ẋ1⎤⎡01⎤⎡x1⎤3-4-6设系统的状态方程为⎢⎥=⎢⎥⎢⎥,试求这个系统的李亚普诺夫函数,⎣ẋ2⎦⎣−2−5.1⎦⎣x2⎦然后再求从封闭曲线v(x)=100边界上的一点到封闭曲线v(x)=.005内一点的响应时间上限。【解】:令Q=IATP+PA=−I求矩阵P,即⎡0−2⎤⎡P11P12⎤⎡P11P12⎤⎡01⎤⎡−10⎤⎢⎥⎢⎥+⎢⎥⎢⎥=⎢⎥khdaw.com⎣1−5.1⎦⎣P21P22⎦⎣P21P22⎦⎣−2−5.1⎦⎣0−1⎦⇒⎡5.51⎤⎢⎥P=⎢44⎥11⎢⎥⎣42⎦所以李氏函数为:5.522v(x)=x+5.0xx+5.0x1122422(v̇)x=−(x1+x2)−1−1QP−λI=P−λI=0I−λP=0则λ1=.23062,λ2=.069381v(x,t)1.005t−t0=−ln=−ln=10.955ηminv(x0,t0)λ21003-4-7试确定下列非线性系统在原点处的稳定性。⎧ẋ=x−x−x3⎧ẋ=−x+x+x(x2+x2)⎪1121⎪112112)1(⎨)2(⎨̇3̇22⎪⎩x=x+x−x⎪⎩x=−x−x+x(x+x)2122212212【解】:(1)采用非线性系统线性化的方法,在平衡点原点处线性化得:khdaw.com75若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性⎡∂f1∂f1⎤∂f⎢∂x∂x⎥⎡1−3x2−1⎤⎡1−1⎤A==⎢12⎥=⎢1⎥=∂xTx=0⎢∂f2∂f2⎥11−3x2⎢11⎥⎢⎣2⎥⎦x=0⎣⎦⎢⎣∂x∂x⎥⎦12x=0s−112sI−A==s−2s+2=0−1s−1系统的两个特征值均在右半平面,则系统在平衡点附近不稳定。(2)采用非线性系统线性化的方法,在平衡点原点处线性化得:⎡∂f1∂f1⎤∂f⎢∂x∂x⎥⎡−1+3x2+x21+2xx⎤⎡−11⎤A==⎢12⎥=⎢1212⎥=∂xTx=0⎢∂f2∂f2⎥−1+2xx−1+x2+3x2⎢−1−1⎥⎢⎣1212⎥⎦x=0⎣⎦khdaw.com⎢⎣∂x∂x⎥⎦12x=0s+1−12sI−A==s+2s+2=01s+1系统的两个特征值都在左半平面,则系统在平衡点附近渐近稳定。3-4-8试确定下列非线性系统在原点处稳定时的参数a、b的取值范围(其中二者均大于或等于零,但二者不同时为零)。⎧⎪ẋ1=x2⎨3⎪⎩ẋ2=−x1−ax2−bx2【解】:⎡∂f1∂f1⎤∂f⎢∂x∂x⎥⎡01⎤⎡01⎤A==⎢12⎥=⎥=Tx=0⎢2⎢⎥∂x⎢∂f2∂f2⎥⎣−1−a−3bx2⎦x=0⎣−1−a⎦⎢⎣∂x∂x⎥⎦12x=0s−12sI−A==s+as+11s+a结论:系统在原点渐近稳定的充要条件是a大于0,b任意(同时还需满足题目要求)。⎧⎪ẋ1=x23-4-9试证明系统⎨2在a1>,0a2>0时是全局渐近稳定的。⎪⎩ẋ2=−a1x1−a2x1x2【解】:求平衡点:khdaw.com76若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性⎧⎪ẋ1=x2=0⎧x1e=0⎨2⇒⎨⎪⎩ẋ2=−a1x1−a2x1x2=0⎩x2e=0设22(v)x=5.0ax+5.0x1122v̇(x)=a1x1̇x1+x2ẋ2=a1x1x2+x2(−a1x2−a2x1x2)22v̇(x)=−a2x1x2<0结论a1>0,v(x)正定;a2>0,v̇(x)负定,系统渐近稳定。22因为x⇒∞时,(v)x=5.0ax+5.0x⇒∞,所以系统又是大范围渐近稳定。khdaw.com1123-4-10试用克拉索夫斯基法确定非线性系统在原点x=0处为大范围渐近稳定时,参数ea和b的取值范围。⎧⎪ẋ1=ax1+x2⎨3⎪⎩ẋ2=x1−x2+bx2【解】:⎡∂f1∂f1⎤∂f⎢∂x∂x⎥⎡a1⎤J==⎢12⎥=∂xT⎢∂f2∂f2⎥⎢1−1+3bx2⎥⎣2⎦⎢⎣∂x1∂x2⎥⎦令P=ITv(x)=f(x)f(x)TTT⎡a1⎤()v̇x=f()[xJ+]J(f)x=2f(x)f(x)⎢2⎥1−1+3bx⎣2⎦系统在x=0处渐近稳定的条件是v̇(x)负定。而v̇(x)负定的条件为:ea12a<,0=−a+3abx−1>0221−1+3bx2大范围渐近稳定的条件是:x⇒∞时v(x)⇒∞khdaw.com77若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性而x⇒∞时,=+2+−+32⇒∞v(x)(axx)(xxbx)12122a12所以系统大范围渐近稳定的条件是:a<,0=−a+3abx−1>0221−1+3bx23-4-11试用变量-梯度法构成下述非线性系统的李氏函数。⎧⎪ẋ=−x+2x2x1112⎨⎪⎩ẋ2=−x2【解】:求平衡点:khdaw.com⎧⎪ẋ=−x+2x2x=0⎧x=01112⇒1e⎨⎨⎪⎩ẋ2=−x2=0⎩x2e=0设⎡a11x1+a12x2⎤⎡∇V1⎤∇V=⎢⎥=⎢⎥⎣a21x1+a22x2⎦⎣∇V2⎦T23222v(̇x)=(∇V)ẋ=−ax(−a+a)xx+2axx+2axx−ax11112211211121212222若选∂∇V1∂∇V2a11=a22=,1a12=a21=0=a12==a21=0∂x2∂x1满足旋度方程条件22(v̇)x=−x1(−2xx)−x。当xx<5.0时,v̇(x)负定112212x1(x2=)0x2(x1=x1)22而v(x)=∫x1dx1+∫x2dx2=(5.0x1+x2)为正定。00当xx<5.0时,系统在平衡点渐近稳定。123-4-12设非线性系统方程为⎧ẋ1=−f(1x)1+f2(x1,x2)⎨式中f1)0(=f3)0(=,0f2,0(x2)=0⎩ẋ2=f3(x2)试求系统原点x=0稳定的充分条件。e【解】:由第一法,khdaw.com78若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性⎡∂f1∂f2∂f2⎤−+⎢⎥∂f⎢∂x1∂x1∂x2⎥A=Tx=0=∂x⎢∂f3⎥0⎢⎣∂x⎥⎦2x=0稳定条件为:∂f1∂f2∂f3−+<0,<0∂x∂x∂x112由克拉索夫斯基法设()=̇Ṫ为正定。vxxẋ()=̇Ṫkhdaw.comvxxFx⎡∂f1∂f2∂f2⎤⎡∂f1∂f2⎤⎢−+⎥⎢−+0⎥F=(∂f)T+∂f=⎢∂x1∂x1∂x2⎥+⎢∂x1∂x1⎥∂xT∂xT⎢∂f3⎥⎢∂f2∂f3⎥0⎢⎣∂x2⎥⎦⎢⎣∂x2∂x2⎥⎦⎡∂f1∂f2∂f2⎤⎢(2−+)⎥⎢∂x1∂x1∂x2⎥=⎢∂f2∂f3⎥2⎢⎣∂x2∂x2⎥⎦⎧∂f1∂f2⎪−+<0当⎪∂x1∂x1时渐近稳定。⎨⎪∂f1∂f2∂f3∂f22(4−+)>()⎪⎩∂x1∂x1∂x2∂x2⎧∂f1∂f2⎪≥当⎪∂x1∂x1时稳定。⎨⎪∂f1∂f2∂f3∂f22(4−+)≥()⎪⎩∂x1∂x1∂x2∂x23-4-13试用阿依捷尔曼法分析下列非线性系统在原点x=0处的稳定性。结构如题e3-4-13图所示。5F(e)=e+er(t)=0eF(e)1cs(s+)1khdaw.com79若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性题3-4-13图【解】:当输入为零时,非线性系统方程可以写成ė̇+ė+F(e)=0若取状态变量:x=e,x=ė,那么系统的状态方程为:12⎧ẋ1=x2⎨⎩ẋ2=−x2−F(e)(1)在x=0处将非,线性环节输入-输出特性用一直线近似F(e)=ke,取k=1e则线性化状态方程为:⎧ẋ1=x2⎨khdaw.com⎩ẋ2=−x2−x1(2)取二次型函数作为系统的李氏函数,则有TTv(x)=xPx,v̇(x)=−xQx取Q=I⎡5.15.0⎤22得到P=⎢⎥v(x)=5.1x1+x1x2+x2为正定。⎣5.01⎦(3)22T⎡−k1−k⎤̇v(x)=3ẋ1x1+̇x1x2+x1̇x2+2x2ẋ2=−kx1+2(−2k)x1x2−x2=x⎢⎥x1⎣−k−1⎦当−k<0,()120k−k−>时v̇(x)为负定,从而求得.03820,δ>0,β<0,γ<0。12(1)确定系统的平衡点。(2)在平衡点附近线性化,并讨论平衡点的稳定性。【解】:(1)khdaw.com80若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性⎧ẋ1=αx1+βx1x2=0⎨⎩ẋ2=γx2+δx1x2=0得到平衡状态:⎧γ⎪x1e=−⎧x1e=0⎪δ⎨,⎨⎩x2e=0⎪x=−α2e⎪⎩β(2)线性化⎧ẋ1=(α+βx2e)x1+βx1ex2⎨⎩ẋ2=δx2ex1+(γ+δx1e)x2对于平衡点:khdaw.com⎧x1e=0⎧ẋ1=αx1⎨,⎨⎩x2e=0⎩ẋ2=γx2特征值为:⎧λ1=−α⎨⎩λ2=−γ⎧λ1<0因为α>0,γ<0所以⎨,由第一法,系统不稳定。⎩λ2>0对于平衡点:⎧γ⎧βγ⎪x1e=−⎪ẋ1=−x2⎪δ⎪δ⎨,⎨αδα⎪x2e=−⎪ẋ2=−x1⎪⎩β⎪⎩β⎡βγ⎤⎢0−⎥δA=⎢⎥δα⎢−0⎥⎢⎣β⎥⎦特征值为:λ1=λ2=αγ因为α>0,γ<0,λ,λ为纯虚数,由第一法,无法确定系统的稳定性。12dx2(γ+δx1)x2α+βx2(γ+δx1)=,dx2−dx1=0dx(α+βx)xxx12121dlnx−γlnx+βx−δx=const2121或(dlnx+βx)−(γlnx+δx)=const2211khdaw.com81若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性其轨迹图如图题3-4-14图所示x2α−βγ−x1khdaw.comδ题3-4-14图⎧x1e=0可见⎨为不稳定的平衡点。⎩x2e=0⎧γx=−⎪1e⎪δ⎨为稳定的平衡点。α⎪x=−2e⎪⎩β☆3-4-15试求下列非线性微分方程⎧ẋ1=x2⎨的平衡点,然后对各平衡点进行线性化,并判断平衡点是否稳定。⎩ẋ2=−sinx1−x2【解】:求平衡点:⎧ẋ1=x2=0⎧x1e=nπn=,0±,1±2⋯⎨⇒⎨⎩ẋ2=−sinx1−x2=0⎩x2e=0线性化方程⎧ẋ1=x2=0⎨⎩ẋ2=−cos(x1e)x1−x2=0对于平衡点⎧x1e=2nπ⎨⎩x2e=0khdaw.com82若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性⎧ẋ1=x2则⎨⎩ẋ2=−x1−x2⎡01⎤A=⎢⎥⎣−1−1⎦特征方程为λ(λ+)1+1=0,特征根都在左半平面,所以系统为渐近稳定。对于平衡点⎧x1e=2(n+)1π⎨⎩x2e=0⎧ẋ1=x2⎨khdaw.com⎩ẋ2=x1−x2⎡01⎤A=⎢⎥⎣1−1⎦特征方程为λ(λ+)1−1=0,有一个特征根在右半平面,所以系统不稳定。☆3-4-16非线性系统状态方程为⎧⎪ẋ1=x2⎨a>0试确定平衡状态的稳定性。⎪⎩̇2x2=−a1(+x2)x2−x1【解】:求平衡点:⎧⎪ẋ1=x2=0⎧x1e=0⎨⇒⎨⎪⎩̇2x=0x2=−a1(+x2)x2−x1=0⎩2e线性化方程为:⎧ẋ1=x2⎨⎩ẋ2=−ax2−x1⎡01⎤A=⎢⎥⎣−1−a⎦特征方程为λ(λ+a)+1=0a>0时特征根都在左半平面,所以系统为渐近稳定。☆3-4-17非线性系统状态方程为⎧⎪ẋ1=x2⎨试用克拉索夫斯基法确定系统原点的稳定性。̇3⎪⎩x2=−x1−x2khdaw.com83若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性【解】:⎡ẋ1⎤⎡f1(x)⎤⎡x2⎤ẋ=⎢⎥=f(x)=⎢⎥=⎢3⎥⎣ẋ2⎦⎣f2(x)⎦⎣−x1−x2⎦∂f(x)⎡01⎤J(x)==⎢2⎥∂x⎣−3x1−1⎦设T⎡P11P12⎤v(x)=ẋPẋ,P=⎢⎥⎣P12P22⎦̇()=̇Ṫ=̇T[T()+()]̇khdaw.comvxxQxxJxPPJxx令Q=−I,则v̇(x)为负定。⎡0−3x2⎤⎡PP⎤⎡PP⎤⎡01⎤⎡−10⎤111121112Q=⎢⎥⎢⎥+⎢⎥⎢2⎥=⎢⎥⎢⎣1−1⎥⎦⎣P12P22⎦⎣P12P22⎦⎣−3x1−1⎦⎣0−1⎦⎧1321⎪P11=2+x1+1311⎪6x122⎡+x2+⎤⎢22122⎥⎪⎪P=1⇒P=⎢6x16x1⎥⎨122⎢111⎥⎪6x1+⎪11⎢6x26x22⎥P=+⎣11⎦⎪222⎪⎩6x211321因为2+x1+>0,6x22113211111而P=(+x+)(+)−221222226x16x16x16x111321P=++x1+>0,P正定,所以系统在原点处渐近稳定。46x244122x=x1+x2→∞时,13212131132v(x)=(2+x1+)x2+22x2(−x1−x2)+(2+)(x1+x2)6x1226x16x123221214132v(x)=xx+x+x+(x+x)→∞1221122262khdaw.com84若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第四章控制系统的稳定性所以在原点大范围渐近稳定。☆3-4-18试用变量梯度法构造下列系统的李雅普诺夫函数。⎧ẋ1=x2⎨。⎩ẋ2=a(1)tx1+a2(t)x2【解】:设⎡a11x1+a12x2⎤⎡∇V1⎤∇V=⎢⎥=⎢⎥⎣a21x1+a22x2⎦⎣∇V2⎦T222v(̇x)=(∇V)ẋ=axx+ax+a(t)ax+a(t)axx+a(t)axx+a(t)axkhdaw.com11121221211221121221222222[]2=a(t)ax+a+a()ta+a(t)axx+(a+a(t)a)x12111122112212122222若选a=−a(t),a=,1a=a=0111221221∂∇V1∂∇V2则=a12==a21=0∂x2∂x1满足旋度方程条件2v(̇x)=a(t)x。22当a(t)<0时,v̇(x)为半负定。2x1(x2=)0x2(x1=x1)而22。v(x)=∫−a1(t)x1dx1+∫x2xd2=−5.0a(1)tx1+5.0x200则当()022at<时v(x)为正定。且当x→∞时,v(x)=−5.0at)(x+5.0x→∞1112⎧a1(t)<0所以当⎨时,系统在原点大范围渐近稳定。⎩a2(t)<0khdaw.com85若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器第五章状态反馈和状态观测器3-5-1已知系统结构图如图题3-5-1图所示。(1)写出系统状态空间表达式;(2)试设计一个状态反馈矩阵,将闭环极点特征值配置在−3±5j上。u(t)1x1(t)1x2(t)yt)(s+1(s+2)题3-5-1图【解】:方法一:khdaw.com根据系统结构直接设状态变量如题3-5-1图所示,写状态空间表达式:⎡−10⎤⎡1⎤ẋ=⎢⎥x+⎢⎥u⎣1−2⎦⎣−1⎦y=[01x]⎡1−1⎤Uc=⎢⎥rankUc=2⎣−13⎦系统能控,可以设计状态反馈阵。设状态反馈阵为K=[kk]12状态反馈控制规律为:u=r−Kx求希望特征多项式:22f(*s)=(s+)3+25=s+6s+34求加入反馈后的系统特征多项式:2f(s)=sI−A+bK=s+3(+k1−k)2s+2(+2k1)依据极点配置的定义求反馈矩阵:⎧3(−k2+k1)=6⎧k1=16⎨⇒⎨K=[1613]⎩2(+2k1)=34⎩k2=13方法二:−1−1⎡1−1⎤2K=[01U]cf*(A)=[01⎢]⎥(A6+A+34I)=16[13]⎣−13⎦方法三:(若不考虑原受控对象的结构,仅从配置极点位置的角度出发)求系统传递函数写出能控标准型:khdaw.com86若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器Y(s)11−s=(−)1=U(s)s+1s+2s2+3s+2⎡01⎤⎡0⎤ẋ=⎢⎥x+⎢⎥u⎣−2−3⎦⎣1⎦y=[0−1x]求系统希望特征多项式:22f(*s)=(s+)3+25=s+6s+34~求状态反馈矩阵K:~K=[k1k2=34]2−[6−3]=32[3]khdaw.comP=[01b][Ab−1=]01[⎡1−]1⎤⎥−1=[5.05.0]1⎢⎣−13⎦⎡P1⎤⎡5.05.0⎤P=⎢⎥=⎢⎥⎣P1A⎦⎣0−1⎦~K=KP=[1613]Y(s)103-5-2已知系统的传递函数为=试设计一个状态反馈矩阵,使闭环系U(s)(ss+1)(s+)2统的极点在-2,−1±j。【解】:依据系统传递函数写出能控标准型Y(s)1010==U(s)(ss+1)(s+)2s3+3s2+2s⎡010⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0u⎢⎥⎢⎥⎢⎣0−2−3⎥⎦⎢⎣1⎥⎦y=10[00x]求系统希望特征多项式:232(f)*s(=2s)[(+s+)1+]1=s+4s+6s+4求状态反馈矩阵:K=[kkk4=0][−62−4−3][=441。]123khdaw.com87若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器(s−1)(s+)23-5-3已知系统的传递函数为G(s)=,试问是否可以通过状态反馈,s(−2)(s+1)(s+)3(s−)1(s+)2将传递函数变为和,若有可能,分别求出状态反馈阵K,并画出(s+2)(s+)3(s+1)(s+)3结构图。【解】:系统传递函数无零极点对消,所以系统既能控又能观。可以通过状态反馈进行极点的任意配置。另有状态反馈不改变系统的零点。(1)由闭环传递函数得希望极点为-2,-2,-3。受控对象传递函数:2(s−1)(s+)2s+s−2G(s)==khdaw.coms(−2)(s+1)(s+)3s3+2s2−5s−6受控对象状态空间表达式的能控标准型:⎡010⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0u⎢⎥⎢⎥6⎢⎣5−2⎥⎦⎢⎣1⎥⎦y=[−211x]希望特征多项式为:232(f)*s(=s+)2(s+)3=s+7s+16s+12状态反馈矩阵:K=[kkk12=][6+165+7−2][=18215。]123结构图如图题3-5-3图1所示:18215xẋ3ẋ2x2ẋ1x1ru3ẋ3y2256题3-5-3图1khdaw.com88若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器(2)由闭传递函数得希望极点为-1,1,-3。希望特征多项式为:32sf(*)s=(+s1)(−1s)(+)3=s+3s−s−3状态反馈矩阵:K=[kkk=3−][6+1−5+3−2][=341。]123结构图如图题3-5-3图2所示:34khdaw.comxẋ3ẋ2x2ẋ1x1ru3ẋ3y2256题3-5-3图20⎡0−1⎤⎡1⎤⎢⎥⎢⎥ẋ=10−3x+1u3-5-4已知系统状态空间表达式为⎢⎥⎢⎥,试判断系统的能控性和能观0⎢⎣1−3⎥⎦⎢⎣0⎥⎦y=0[1−2x]性,若不完全能控,用结构分解将系统分解为能控和不能控的子系统,并讨论用状态反馈是否可以使闭环系统稳定。【解】:判系统的能控性和能观性:1⎡0−1⎤2⎢⎥Uc=[bAbAb]=1⎢1−3⎥,rankUc=20⎢⎣1−2⎥⎦⎡C⎤⎡01−2⎤⎢⎥⎢⎥V0=⎢CA⎥=⎢1−23⎥,rankV0=2⎢2⎥⎢⎥⎣CA⎦⎣−23−4⎦khdaw.com89若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器系统不能控不能观。按能控性进行结构分解:取⎡100⎤⎡100⎤⎢⎥−1⎢⎥R=110,R=−110c⎢⎥c⎢⎥⎢⎣011⎥⎦⎢⎣1−11⎥⎦分解后的状态空间表达式为:0⎡−1−1⎤⎡1⎤⎡ẋc⎤−1⎡xc⎤−1⎢⎥⎡xc⎤⎢⎥⎢⎥(=RcAR)c⎢⎥+(Rcb)u=1⎢−2−2⎥⎢⎥+⎢0⎥u⎣ẋc⎦⎣xc⎦⎣xc⎦0⎢⎣0−1⎥⎦⎢⎣0⎥⎦khdaw.com⎡xc⎤[⎡xc]⎤y(=CR)c⎢⎥=1−1−2⎢⎥⎣xc⎦⎣xc⎦因为不能控分量对应的特征值为-1,因此对系统的稳定性无影响,所以可以通过状态反馈的方法,对能控子空间进行极点的任意配置(左半平面),从而使系统稳定。(s+)13-5-5已知系统的传递函数为G(s)=,设计一个状态反馈矩阵,将闭环极点配2s(s+)3置在-2,-2,和-1处,并说明所得的闭环系统是否能观。【解】:被控对象状态空间表达式的能控标准型:因为系统的传递函数可写成:(s+)1s+1G(s)==232s(s+)3s+3s所以能控标准型为:⎡010⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0u⎢⎥⎢⎥0⎢⎣0−3⎥⎦⎢⎣1⎥⎦y=1[10x]闭环后的希望特征多项式为:232fs(*)s=(+)2s(+)1=s+5s+8s+4状态反馈系数阵:K=[kkk4=0][−80−5−3][=482。]123闭环传递函数为:khdaw.com90若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器s+1s+11G(s)===b3222s+5s+8s+4(s+)2(s+)1(s+)2系统闭环传递函数出现零极点对消现象,又有原受控对象本身能控,且状态反馈不改变系统的能控性,所以该闭环系统不能观。⎡−100⎤⎡0⎤⎢⎥⎢⎥3-5-6已知系统状态方程为ẋ=001x+0u,试判断系统是否可以通过状态反馈⎢⎥⎢⎥⎢⎣0−31⎥⎦⎢⎣1⎥⎦分别配置以下两组特征值:(1){-2,-2,-1};(2){-2,-2,-3}。若能配置,求出反馈阵。【解】:khdaw.com判系统的能控性:⎡000⎤2⎢⎥U=[bAbAb]=011,rankU=2c⎢⎥c1⎢⎣1−2⎥⎦系统不能控.按能控性分解:取⎡001⎤0⎡−11⎤⎢⎥−1⎢⎥Rc=⎢010⎥,Rc=0⎢10⎥⎢⎣110⎥⎦1⎢⎣00⎥⎦0⎡−30⎤⎡1⎤⎡ẋc⎤−1⎡xc⎤−1⎢⎥⎡xc⎤⎢⎥⎥(=RAR)⎥+(Rb)u=110⎥+0u⎢ẋcc⎢xc⎢⎥⎢x⎢⎥⎣c⎦⎣c⎦⎢⎥⎣c⎦⎢⎥0⎣0−1⎦⎣0⎦不能控子空间的特征值为-1。(1)对能控子空间进行极点配置,极点位置在-2,-2:⎡0−3⎤⎡1⎤ẋ=⎥x+uc⎢c⎢⎥⎣11⎦⎣0⎦22fs(*)=s(+)2=s+4s+4−1K=[kk=[0]1U]f*(A)12c−12⎡10⎤⎡0−3⎤⎡0−3⎤⎡10⎤=[01⎢]⎥(⎢⎥+4⎢⎥+4⎢⎥)=[56]⎣01⎦⎣11⎦⎣11⎦⎣0khdaw.com1⎦91若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器所以K=[560]原系统的状态反馈阵K为:−1K=KRc⎡0−11⎤[⎢]⎥[]K=560×010=015⎢⎥1⎢⎣00⎥⎦(2)因为状态反馈不能改变不能控部分的极点,而不能控部分的极点为-1,所以不能通过状态反馈将极点配置在{-2,-2,-3}。khdaw.com⎡01⎤⎡0⎤ẋ=⎢⎥x+⎢⎥u3-5-7已知系统状态空间表达式为⎣00⎦⎣1⎦,试设计一个状态观测器,使状态y=1[0x]观测器的极点为-r,-2r,(r>0)。【解】:方法一:⎡C⎤⎡10⎤判能观性V=⎥=⎥,rankV=2。系统能观,可以构造状态观测器。0⎢⎢0⎣CA⎦⎣01⎦确定观测器的希望特征多项式:22fs(*)s=(r+s)(+r2)=s+3rs+2rT确定观测矩阵L=[ll],观测器的特征多项式为:12⎡s0⎤⎡01⎤⎡l1⎤[]2(f)s=sI−(A−LC)=⎥−⎥+⎥10=s+ls+l⎢⎢⎢12⎣0s⎦⎣00⎦⎣l2⎦f*(s)=f(s)⎧⎪l1=3r⇒⎨2⎪⎩l2=2r方法二:⎡l1⎤−1⎡0⎤L=⎢⎥=f*(A)V0⎢⎥⎣l2⎦⎣1⎦khdaw.com92若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器⎧2⎫−1⎪⎡01⎤⎡01⎤2⎡01⎤⎪⎡01⎤⎡0⎤⎡3r⎤=⎨⎢⎥+3r⎢⎥+2r⎢⎥⎬⎢⎥⎢⎥=⎢2⎥⎪⎩⎣00⎦⎣00⎦⎣00⎦⎪⎭⎣00⎦⎣1⎦⎣2r⎦方法三:被控对象特征多项式:⎡01⎤2f(s)=sI−A=sI−⎢⎥=s⎣00⎦确定观测器的希望特征多项式:22khdaw.com(f*)s(=s+)(rs+2)r=s+3rs+2r对应于能观标准型的观测器矩阵:⎡l⎤⎡a*−a⎤⎡2r2−0⎤⎡2r2⎤100L=⎢⎥=⎢⎥=⎢⎥=⎢⎥⎣l2⎦⎣a1*−a1⎦⎢⎣3r−0⎥⎦⎢⎣3r⎥⎦对应于原系统的观测器矩阵:−1⎡0⎤⎡0⎤⎡01⎤P1=V0⎢⎥=⎢⎥,Po=[p1Ap1=⎢]⎥⎣1⎦⎣1⎦⎣10⎦⎡01⎤⎡2r2⎤⎡3r⎤L=PoL=⎢⎥⎢⎥=⎢2⎥⎣10⎦⎢⎣3r⎥⎦⎣2r⎦⎡−1−2−3⎤⎡2⎤⎢⎥⎢⎥ẋ=0−1−1x+0u3-5-8已知系统的状态空间表达式为⎢⎥⎢⎥⎢⎣10−1⎥⎦⎢⎣1⎥⎦y=1[10x](1)设计一个全维观测器,将观测器的极点配置在-3,-4,-5处。(2)设计一个降维观测器,将观测器的极点配置在-3,-4处。(3)画出其结构图。【解】:(1)方法一:确定能观性:⎡C⎤⎡110⎤⎢⎥⎢⎥V0=⎢CA⎥=⎢−1−3−4⎥,rankV0=3⎢2⎥⎢⎥⎣CA⎦⎣−3510⎦系统能观,可设计观测器。求希望特征多项式:khdaw.com93若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器32(f)*(s=3s)(+4s+)(s+)5=s+12s+47s+60求观测器特征多项式:f(s)=sI−A+LC计算观测器系数矩阵:⎡−5.6⎤令f*(s)=f(s)得⎢⎥L=155.⎢⎥⎢⎣−135.⎥⎦方法二:⎡l1⎤⎡0⎤⎡−5.6⎤L=⎢l⎥=f(*A)V−1⎢0⎥=⎢155.⎥⎢2⎥0⎢⎥⎢⎥khdaw.com⎢⎣l3⎥⎦⎢⎣1⎥⎦⎢⎣−135.⎥⎦结构图如图题3-5-8图1所示:∑(A,B,C)uy5.6ẋx112155.y2ẋ2x23135.ẋ3x3题3-5-8图1(2)确定降维观测器的维数:m=1,n=3,则n-m=2。khdaw.com94若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器分解输出系数矩阵c,获得线性变换矩阵T,对原状态空间表达式进行线性变换,使各输出变量y变成各状态变量的单值函数:C=[c1c2=]1[1,0c1=],1c2=[10]−1−1⎡110⎤⎡1−10⎤⎡110⎤⎡c1c2⎤⎢⎥⎢⎥−1⎢⎥T=⎢⎥=010=010,T=0100I⎢⎥⎢⎥⎢⎥⎣2×2⎦⎢⎥⎢⎥⎢⎥⎣001⎦⎣001⎦⎣001⎦C=CT=[10,0]y=x1⎡−1−2−4⎤−1⎢⎥⎡A11A12⎤A=TAT=⎢0−1−1⎥=⎢⎥,⎢1−1−1⎥⎣A21A22⎦⎣⎦⎡0⎤⎡−1−1⎤A11=−,1A12=[−2−4,A]21=⎢⎥,A22=⎢⎥khdaw.com⎣1⎦⎣−1−1⎦⎡2⎤−1⎢⎥⎡0⎤B=TB=⎢0⎥,B1=,2B2=⎢⎥⎣1⎦⎢⎣1⎥⎦⎡l⎤计算线性变换后降维观测器的反馈矩阵1L=⎢⎥(一个输出两个状态)⎣l2⎦2×1fs)(*=s(+3)(s+)4=s2+7s+12⎡s0⎤⎡−1−1⎤⎡l1⎤fs)(=sI−(A22−LA12)=⎢⎥−⎢⎥+⎢⎥[−2−4]⎣0s⎦⎣−1−1⎦⎢⎣l2⎥⎦=s2+(−4l−2l+)2s+2(l−2l)2112⎡l1⎤⎡.31667⎤fs)(*=fs)(⇒L=⎢⎥=⎢⎥⎢⎣l2⎥⎦⎣−.28333⎦求降维状态观测器的状态方程(状态变量z)⎡ż1⎤ż=⎢⎥=(A22−LA12)(z+Ly)+(A21−LA11)y+(B2−LB1)u⎣ż2⎦⎡.5333311.6667⎤⎡z1⎤⎡−13⎤⎡−.63333⎤=⎢⎥⎢⎥+⎢⎥y+⎢⎥u⎣−.6666712.3333⎦⎣z2⎦⎣12⎦⎣.66667⎦⎡xˆ⎤1⎢⎥求降维状态观测器的输出方程(系统针对于线性变换后的状态信号xˆ=⎢xˆ2⎥)⎢xˆ⎥khdaw.com⎣3⎦95若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器⎡xˆ1⎤⎡y⎤⎢ˆ⎥⎡y⎤⎢⎥⎢x2⎥=⎢⎥=⎢z1+.31667y⎥⎢⎥⎣z+Ly⎦⎣xˆ3⎦⎢⎣z2−.28333y⎥⎦求对应于原系统的降维状态观测器的状态信号xˆ:⎡xˆ1⎤⎡−z1−.21667y⎤ˆ⎢ˆ⎥ˆ⎢⎥x=⎢x1⎥=Tx=⎢z1+.31667y⎥⎢⎣xˆ3⎥⎦⎢⎣z2−.28333y⎥⎦绘制模拟结构图依据受控对象,降维观测器的状态方程,以及原系统的降维观测器的输出方程:khdaw.com⎡xˆ1⎤⎡−z1−.21667y⎤⎢⎥⎢⎥xˆ=⎢xˆ2⎥=⎢z1+.31667y⎥⎢⎣xˆ3⎥⎦⎢⎣z2−.28333y⎥⎦结构图如图题3-5-8图2所示:yu∑(A,B,C)13.21667.31667−.53333−żz.6333311−xˆ1−xˆ211.6667.28333.66667−−żz.6666722xˆ312.333312题3-5-8图213-5-9已知系统的传递函数为G(s)=,s(s+1)(s+)213(1)确定一个状态反馈矩阵K,使闭环系统的极点为-3和−±j;khdaw.com2296若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器(2)确定一个全维状态观测器,并使观测器的极点全部为-5;(3)确定一个降维状态观测器,并使观测器的极点在-5处;(4)分别画出闭环系统的结构图。(5)求出闭环传递函数。【解】:(1)系统的传递函数可写成:11G(s)==(ss+1)(s+)2s3+3s+2s能控标准型为:0⎡10⎤⎡0⎤⎢⎥⎢⎥ẋ=001x+0ukhdaw.com⎢⎥⎢⎥0⎢⎣−2−3⎥⎦⎢⎣1⎥⎦y=1[00x]希望特征多项式:12332f*()s=(s+3)[(s+)+]=s+4s+4s+324反馈矩阵:K=[kkk3=0][−42−4−3][=321]123(2)确定能观性:⎡C⎤⎡100⎤⎢⎥⎢⎥V0=⎢CA⎥=⎢010⎥,rankV0=3⎢2⎥⎢⎥⎣CA⎦⎣001⎦系统能观。求观测器的希望特征多项式:332fs(*)=s(+)5=s+15s+75s+125求观测器特征多项式:32f(s)=sI−A+LC=s3(+)+l1s3(+l1+l2+)2s+(l3+2l1+3l2)计算观测器系数矩阵:⎡12⎤⎢⎥令f*(s)=f(s)得L=37⎢⎥⎢⎣−10⎥⎦(3)khdaw.com97若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器m=1,n=3,则n-m=2。C=1[00,则输出本身为状态变量的单值函数,无须进行线性变换。]⎡l⎤对受控对象状态空间表达式直接分块求状态观测器的反馈矩阵1L=⎢⎥(一个输出⎣l2⎦2×1两个状态)c=,1c=[00,]12⎡0⎤⎡01⎤A11=0[],A12=10[,A]21=⎢⎥,A22=⎢⎥⎣0⎦⎣−2−3⎦⎡0⎤B1=,0B2=⎢⎥⎣1⎦22khdaw.comfs)(*=s(+)5=s+10s+25f(s)=sI−(A22−LA12)2=s+(l+)3s+3(l+l+)2112⎡l1⎤⎡7⎤fs)(*=fs)(⇒L=⎢⎥=⎢⎥⎣l2⎦⎣2⎦降维观测器的状态方程z⎡ż1⎤ż=⎢⎥=(A22−LA12)(z+Ly)+(A21−LA11)y+(B2−LB1)u⎣ż2⎦⎡−71⎤⎡z1⎤⎡−47⎤⎡0⎤=⎢⎥⎢⎥+⎢⎥y+⎢⎥u⎣−4−3⎦⎣z2⎦⎣−34⎦⎣1⎦降维观测器的输出方程xˆ⎡xˆ1⎤⎡y⎤⎢xˆ⎥⎡y⎤⎢⎥2=⎢⎥=⎢z1+7y⎥⎢⎥⎣z+Ly⎦⎢⎣xˆ3⎥⎦⎢⎣z2+2y⎥⎦(5)闭环传递函数为:11Gb(s)==13s34s24s322+++(s+3)[(s+)+]24(4)题(2)的结构图如图题3-5-9图1所示:题(3)的结构图如图题3-5-9图2所示:khdaw.com98若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器ru∑(A,B,C)y21231037ẋx3ẋẋxykhdaw.comu32ẋ32x1132题3-5-9图1khdaw.com99若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器23ruy∑(A,B,C)xˆ177żz4711xˆkhdaw.com22434xˆżz3223题3-5-9图2⎧ẋ=Ax+Bu3-5-10设系统的状态空间表达式为⎨,现引入状态反馈u=r−xkˆ构成闭环系⎩y=Cx统,xˆ为x的估值。(1)写出该系统状态变量x的全维渐近观测器的状态方程;(2)写出带状态反馈全维观测器的闭环系统的状态方程,并画出包括状态反馈及全维观测器的闭环系统的结构图。【解】:(1)̇xˆ=Ly−LCxˆ+Axˆ+Bu=Ly+(A−LC)xˆ+Bu(2)⎧⎪ẋ=Ax+Bu⎨⎪⎩xˆ̇=LCx−LCxˆ+Axˆ+Bu=LCx+(A−LC)xˆ+Buu=r−Kxˆkhdaw.com100若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器y=Cx⎧⎪ẋ=Ax+B(r−Kxˆ=)Ax−BKxˆ+Br⇒⎨⎪⎩ẋˆ=LCx+(A−LC)xˆ+B(r−Kxˆ=)LCx+(A−LC−BK)xˆ+Bry=Cx⎡ẋ⎤⎡A−BK⎤⎡x⎤⎡B⎤⇒⎢⎥=⎢⎥⎢⎥+⎢⎥r⎣xˆ̇⎦⎣LCA−LC−BK⎦⎣xˆ⎦⎣B⎦⎡x⎤y=[C0⎢]⎥⎣xˆ⎦闭环系统结构图如图题3-5-10图所示:khdaw.com题3-5-10图⎡−5−1⎤⎡0⎤ẋ=⎢⎥x+⎢⎥u3-5-11已知系统的状态空间表达式为⎣60⎦⎣2⎦,y=[01x](1)画出系统结构图;(2)求系统传递函数;(3)判定系统的能控性和能观性(4)求系统的状态转移矩阵Φ(t);khdaw.com101若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器⎡0⎤(5)当x)0(=⎢⎥,ut)(=0时,系统的输出y(t);⎣3⎦(6)设计全维状态观测器,将观测器的极点配置在−10±j10处;(7)在(6)的基础上,设计状态反馈矩阵K,使系统的闭环极点配置在−5±j5处。(8)画出系统总体结构图。【解】:(1)系统结构图如图题3-5-11图1所示:yuẋ2x2ẋ1x12−khdaw.com−56题3-5-11图1(2)−1(2s+)5G()s=C(sI−A)b=(s+2)(s+)3(3)传递函数无零极点对消,则既能控又能观。或:⎡0−2⎤Uc=[bAb=]⎢⎥,rankUc=2⎣20⎦⎡C⎤⎡01⎤V=⎥=⎥,rankV=20⎢⎢0⎣CA⎦⎣60⎦系统既能控又能观。(4)⎡s−1⎤−1⎢⎥At−1−1−1⎡s+51⎤−1(s+2)(s+)3(s+2)(s+)3Φ(t)=e=L[(sI−A)]=L⎢⎥=L⎢⎥⎣−6s⎦⎢6s+5⎥(⎢⎣s+2)(s+)3(s+2)(s+)3⎥⎦⎡−2e−2t+3e−3t−e−2t+e−3t⎤=⎢⎥−2t−3t−2t−3t6⎢⎣e−6e3e−2e⎥⎦(5)⎡−2e−2t+3e−3t−e−2t+e−3t⎤⎡0⎤[]−2t−3ty()t=01⎢−2t−3t−2t−3t⎥⎢⎥9=e−6e(t≥)06⎢⎣e−6e3e−2e⎥⎦⎣3⎦khdaw.com102若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器(6)观测器的希望特征多项式:22f(*s)=(s+10)+100=s+20s+200T观测器矩阵为L=[ll],12观测器的特征多项式:⎡s0⎤⎡−5−1⎤⎡l1⎤[](f)s=sI−(A−Lc)=⎢⎥−⎢⎥+⎢⎥010s60l⎣⎦⎣⎦⎣2⎦2=s+5(+l)2s+5(l2+6l1+)6khdaw.comf(s)=f*(s)⇒⎧5(+l2)=20⇒⎧⎪l2=15⎨⎨119⎩5(l2+6l1+)6=200⎪l1==19.83⎩6(7)22希望特征多项式:f(*s)=(s+)5+25=s+10s+50状态反馈后的特征多项式:⎡s0⎤⎡−5−1⎤⎡0⎤(f)s=sI−(A−bK)=⎥−⎥+⎥[kk]⎢⎢⎢12⎣0s⎦⎣60⎦⎣2⎦2=s+5(+2k)s+(10k−2k+)6221⎧k2=5.2⎧5(+2k2)=10⎪f(s)=f*(s)⇒⎨⇒⎨19(10⎩k2−2k1+)6=50⎪k1=−=−5.9⎩2K=[kk=][−5.95.2]12(8)全维观测器的状态空间表达式为:̇xˆ=(A−LC)xˆ+Bu+Lẏxˆ=Axˆ+Bu+L(y−yˆ)̇⎡−5−1⎤⎡0⎤⎡19.83⎤xˆ=⎢⎥xˆ+⎢⎥u+⎢⎥(y−yˆ)⎣60⎦⎣2⎦⎣15⎦系统总体结构图如图题3-5-11图2所示:khdaw.com103若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
课后答案网www.khdaw.com第三部分现代控制理论习题详解第五章状态反馈和状态观测器ru∑(A,B,C)−y−19.83xˆẋˆ115.9−6−u5yˆ152xˆxˆ̇225.2khdaw.com题3-5-11图2khdaw.com104若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com'
您可能关注的文档
- 传感器与检测技术 (陈杰 著) 高等教育出版社 课后答案
- 化工原理第二版答案 杨祖荣 刘丽英 刘伟
- 感测技术基础 第二版 (孙传友 孙晓斌 著) 电子工业出版社 课后答案 第9章习题解答
- 传感器与检测技术 (陈杰 著) 高等教育出版社 课后答案_
- 感测技术基础 第二版 (孙传友 孙晓斌 著) 电子工业出版社 课后答案 第10章习题解答
- 西方经济学_(臧良运_王锦_胡启亮_季秀杰_著)_科学出版社
- 化学 必修2 (宋心琦 王晶 李文鼎 著) 人民教育出版社 课后答案
- 感测技术基础 第二版 (孙传友 孙晓斌 著) 电子工业出版社 课后答案 第11章习题解答
- 化学 必修二 人民教育出版社 课后答案
- 感测技术基础 第二版 (孙传友 孙晓斌 著) 电子工业出版社 课后答案 第12章习题解答
- 传感器与检测技术 (徐科军 著) 电子工业出版社 课后答案
- 化学反应工程 第二版 (陈甘棠 著) 化学工业出版社 课后答案
- 2016化学与人类文明课后习题答案
- 化学反应工程 第二版 (郭锴 著) 化学工业出版社 课后答案
- 线性代数(居余马 著)第二版 清华大学出版社
- 6000考研俄语高频词汇 课后答案
- 高等数学同济第六版下册课后答案
- 传感器原理及应用 (王化祥 张淑英 著) 天津大学出版社 课后答案
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明