

- 170.16 KB
- 2022-04-22 11:28:35 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中华人民共和国国家标准振动与冲击传感器的校准方法CRPI门3823.14一1995离心机法一次校准Methodsforthecalibrationofvibrationandshockpick-upsPrimarycalibrationbycentrifuge卞标准等效采用1S05347-7:199M振动与冲击传感器校准方法离心机法一次校川1主题内容与适用范围卞标准规定了振动与冲击传感器离心机法一次校准所用仪器设备及校准方法的详细要求本标准适用于应变式、压阻式等具有零频响应的直线运动3V加速度传感器,其中包括标敞和1_作传感器本标准适)11零频加速度:10-1000m/s"本标准适用的误差限:读数的+1Y,2引用标准G13/72298机械振动与冲击术语GB/"I"13823.1振动与冲击传感n的校准方法基木概念3环境条件温度:20十SC;相对湿度:`><75Y4仪器设备4.1离心机4.1门加速度10--100m/s“水一平度不大1=士0.50:加速度大于100-/,":水平度不大于上21.4.1.2转台或转臂旋转频率一周中变化量:应小于名义值的上0.054门.3当加速度传感器用一个对加速度不灵敏的等效阻抗器代替时.离心机以校准转速旋转沉”卜的交流声和噪声应低于读数的一60dB4.2旋转频率测童系统不确定度小千读数的土。.OSV4.3电压表不确定度:改流电压测量小于读数的士0.()1Y,4.4其他要求4.4-飞在水平面内加速度传感器灵敏轴与径向的角度偏J.:不大于0.11"4.4-2离心机旋转朴l.`到加速度传感器质量中心半径测星的不确定度应小f改数的.1">国家技术监督局1995一04一02批准1996一02一01实施
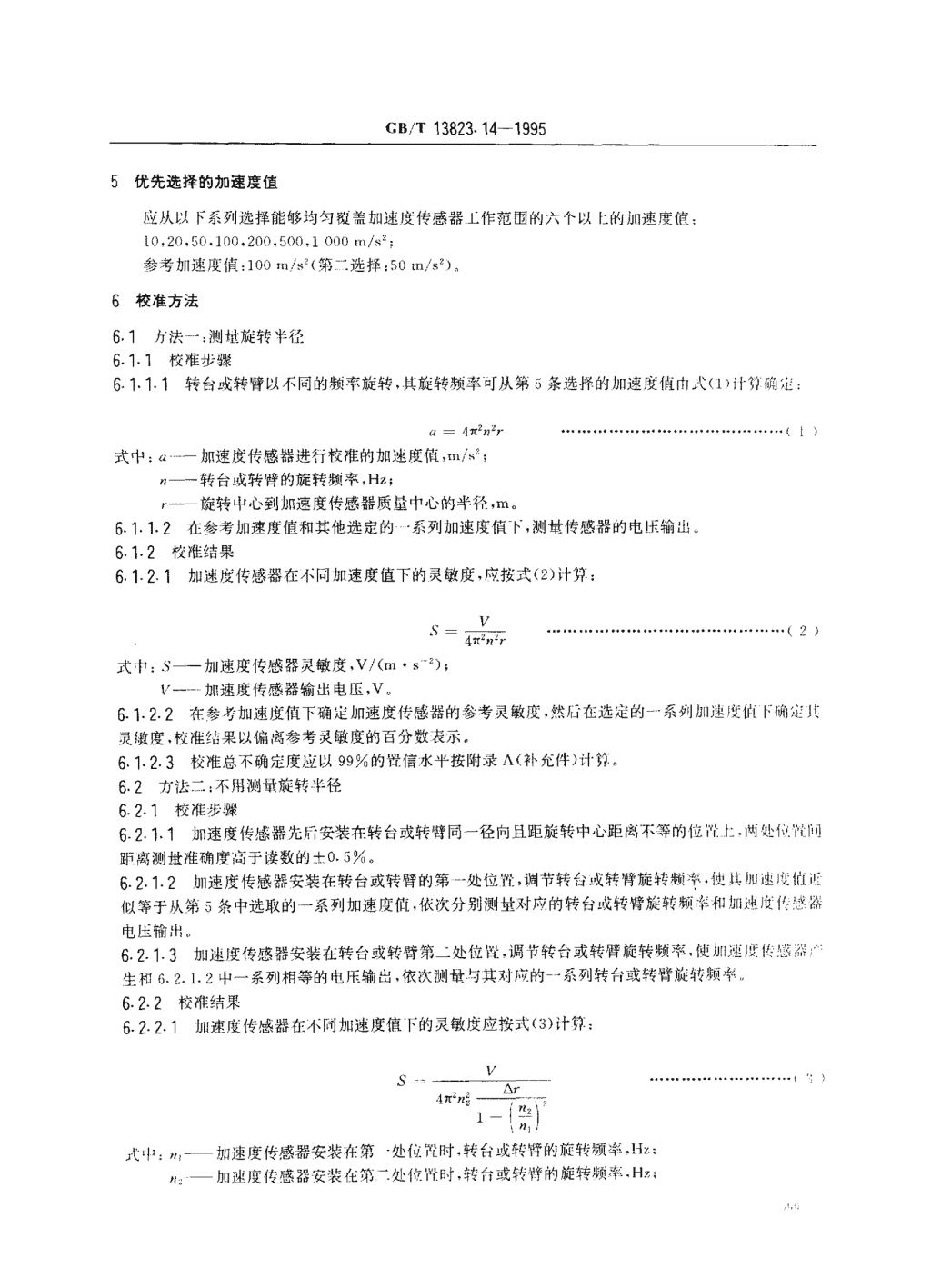
CB/T1382314-19955优先选择的加速度值应从以F系列选择能够均匀夜盖加速度传感器上作范围的六个以仁的加速度值10,20,50,100,200,500,1000m/s2:参考加速度值:100rn/,2第二选择:50vn/s2)6校准方法6.1方法一:测址旋转半径6门.1校准步骤6门门1转台或转臂以不同的频率旋转,其旋转频率可从第0条选择的加速度值由式(I)t1"37确定a一4v2,,=,-·。················。··············⋯⋯‘式中:V;。-一转台或转臂水平误差,(0);R-加速度传感器敏感轴在水平面内的径向安装偏差,(“):
GB/T1382314-1995a一一校准加速度,m/s"(见6.1.1);n-旋转频率,Hz;‘—旋转频率绝对误差,Hz;‘。—旋转频率稳定性的绝对误差,Hz;r旋转中心到加速度传感器质量中心的旋转半径,m;er—旋转半径的误差,m;aH—交流声和噪声引起的加速度幅值,m/s";P一给加速度传感器的供电电压,v;‘—给加速度传感器的供电电压误差,VA2.2方法二在设定的校准加速度值下,从误差合成公式加速度传感器灵敏度绝对误差。,应按式(As)计算,并用V/(m·s-})表示:!9.8(1一cosa)es一士}(-0,)z+厂Iz+(1一。os#)2+}梁0tl}‘a/、‘山r1飞。...⋯⋯(八5.}2e=,’+{2e=2I`+}aH}’+{ee2+「rZed.12.、n,、n.1laIlPI`}n;寸"2)161式中:S—加速度传感器灵敏度,V/(m·s-")(见6.2-2);V—加速度传感器输出电压,V;ey一一加速度传感器输出电压绝对误差,V;。—转台或转臂水平误差f(e);9—加速度传感器敏感轴在水平面内的径向安装偏差,(。);a校准加速度,m/sz;}r-加速度传感器两次安装位置间的距离,M;。。—加速度传感器两次安装位置间距离的绝对误差,m;。—加速度传感器在第一处安装位置时的旋转频率,Hz;‘、—加速度传感器在第一处安装位置时旋转频率的绝对误差,Hz;、—加速度传感器在第二处安装位置时的旋转频率,Hz;e.2—加速度传感器在第二处安装位置时旋转频率的绝对误差,Hz;an—交流声和噪声引起的加速度幅值,m/s";户—给加速度传感器的供电电压,V;‘—给加速度传感器供电电压的绝对误差,V;e,—转台或转臂旋转稳定性的绝对误差,Hz,A3在整个频率和加速度值f程范围内加速度传感器灵敏度总的绝对误差的计算根据A2.1和A2.2计算的加速度传感器灵敏度绝对误差e:仅适于相应各个校准加速度值,在整个旋转频率和加速度值范围内灵敏度总的绝对误差。s,(以V/(m一z)表示)应按式(A6)计算丛10eS3,衬Il(leSs卜}L_10.A0)+(L10,0}!’十{+{1L0.v0,z+{1I0A0!2-+几一-10)’+(_1R00“+{1E0A0”+(1E0R0’{‘式中:S加速度传感器灵敏度,V/(m·s-z)(见6.1.2或6.2.2);在校准加速度值下按照A2.1或A2.2计算的加速度传感器灵敏度绝对误差e,
GB/T1382314-1995V/(m·s一号):L.A—与被校传感器相接的放大器频率线性偏差,以相对于参考灵敏度的百分比表示;L,一传感器频率线性偏差,以相对于传感器参考灵敏度的百分比表示;L,与被校传感器相接的放大器幅值线性偏差,以相对于参考灵敏度的百分比表示;L,,传感器幅值线性偏差,以相对于传感器参考灵敏度的百分比表示;与被校传感器相接的放大器增益的不稳定性误差,以相对于参考灵敏度的百分比表示传感器不稳定性误差,以相对于传感器参考灵敏度的百分比表示;R—与被校传感器相接的放大器量程跟踪误差(不同放大器设定下的增益误差),以相对于参考灵敏度的百分比表示;E,,一一由放大器受环境影响所产生的误差,以相对于参考灵敏度的百分比表示;ER—由加速度传感器受环境影响所产生的误差,以相对于参考灵敏度的百分比表示附加说明:本标准由国家技术监督局提出。本标准由全国机械振动与冲击标准化技术委员会归「1。本标准由陕西省计量测试研究所负责起草。本标准主要起草人杨建辉、第五兴乐。'
您可能关注的文档
- GBT 13619-1992 微波接力通信系统干扰计算方法.pdf
- GBT 13620-1992 卫星通信地球站与地面微波站之间协调区的确定和干扰计算方法.pdf
- GBT 13671-92 不锈钢缝隙腐蚀电化学试验方法.pdf
- GBT 13711-1992 国际海事卫星A船舶地球站技术要求.pdf
- GBT 13743-1992 直流磁电系检流计.pdf
- GBT 13823.1-93 振动与冲击传感器的校准方法基本概念.pdf
- GBT 13823.11-1995 振动与冲击传感器的校准方法 激光干涉法低频振动一次校准.pdf
- GBT 13823.12-1995 振动与冲击传感器的校准方法 安装在钢块上的无阻尼加速度计 共振频率测试.pdf
- GBT 13823.13-1995 振动与冲击传感器的校准方法 光切割法冲击校准(一次校准).pdf
- GBT 13850-1998 交流电量转换为模拟量或数字信号的电测量变送器.pdf
- GBT 13865-1992 电力定量器.pdf
- GBT 13866-92 振动与冲击测量描述惯性式传感器特性的规定.pdf
- GBT 13919-1992 35mm电影磁性声带检验片技术规范.pdf
- GBT 13920-1992 35mm电影 主观检验片(彩色测试图).pdf
- GBT 13962-1992 光学仪器术语.pdf
- GBT 13963-1992 复印机术语.pdf
- GBT 13965-1992 仪表元器件术语.pdf
- GBT 13966-1992 分析仪器术语.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明