

- 43.50 KB
- 2022-04-22 11:43:51 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
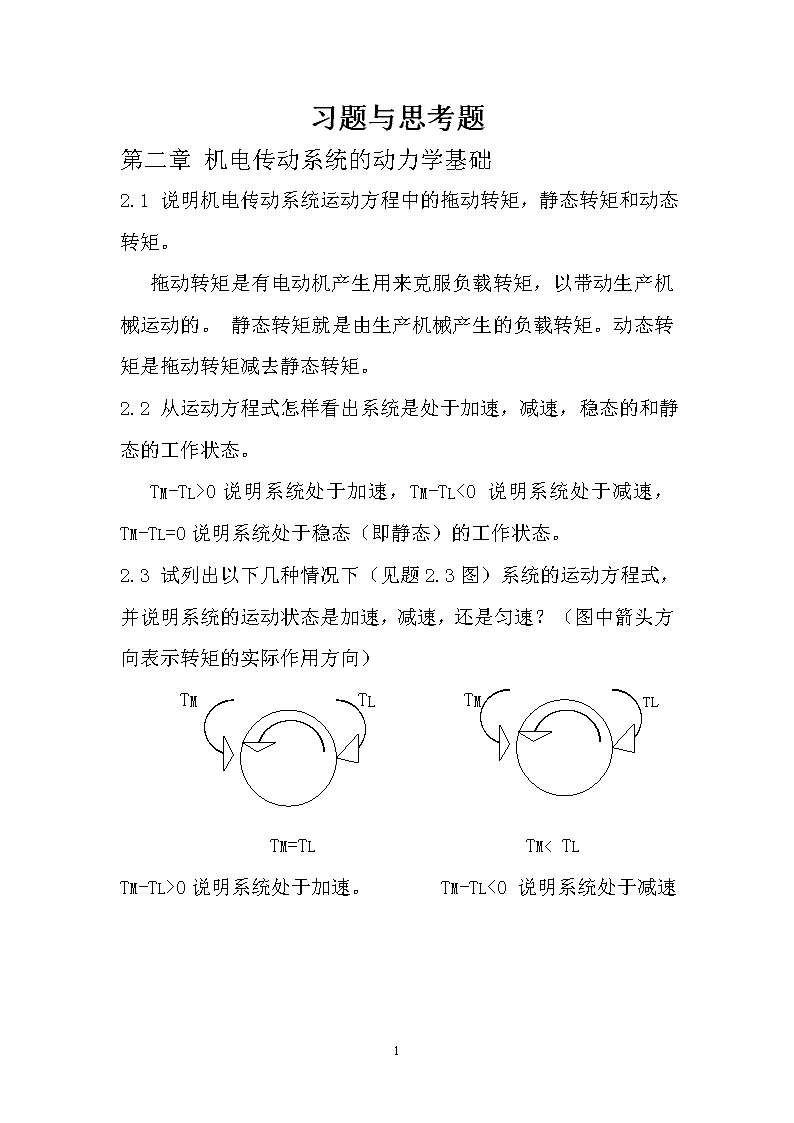
'习题与思考题第二章机电传动系统的动力学基础2.1说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。静态转矩就是由生产机械产生的负载转矩。动态转矩是拖动转矩减去静态转矩。2.2从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。TM-TL>0说明系统处于加速,TM-TL<0说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。2.3试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TMTLTMTLNTM=TLTM0说明系统处于加速。TM-TL<0说明系统处于减速5
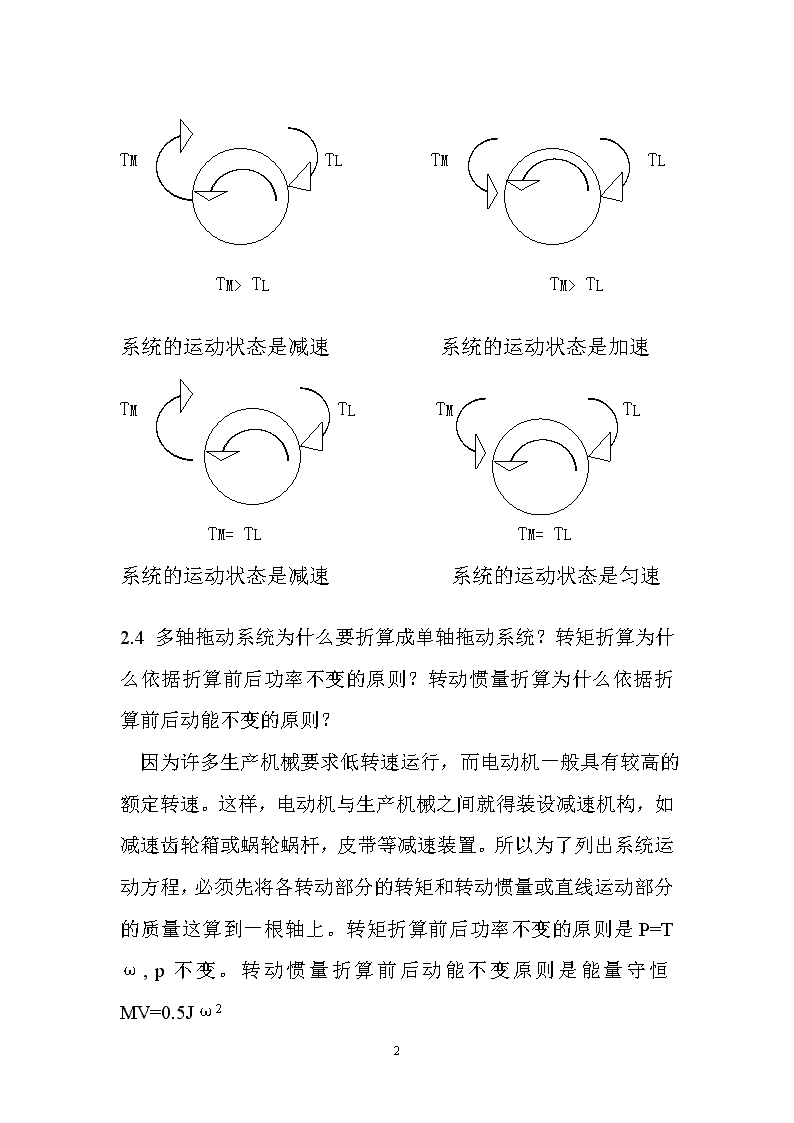
TMTLTMTLTM>TLTM>TL系统的运动状态是减速系统的运动状态是加速TMTLTMTLTM=TLTM=TL系统的运动状态是减速系统的运动状态是匀速2.4多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。转矩折算前后功率不变的原则是P=Tω,p不变。转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω25
2.5为什么低速轴转矩大,高速轴转矩小?因为P=Tω,P不变ω越小T越大,ω越大T越小。2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375.P=ωG∂D2/375.,P不变转速越小GD2越大,转速越大GD2越小。2.7如图2.3(a)所示,电动机轴上的转动惯量JM=2.5kgm2,转速nM=900r/min;中间传动轴的转动惯量JL=16kgm2,转速nL=60r/min。试求折算到电动机轴上的等效专惯量。折算到电动机轴上的等效转动惯量:j=Nm/N1=900/300=3,j1=Nm/Nl=15J=JM+J1/j2+JL/j12=2.5+2/9+16/225=2.79kgm2.2.8如图2.3(b)所示,电动机转速nM=950r/min,齿轮减速箱的传动比J1=J2=4,卷筒直径D=0.24m,滑轮的减速比J3=2,起重负荷力F=100N,电动机的费轮转距GD2M=1.05Nm2,齿轮,滑轮和卷筒总的传动效率为0.83。试球体胜速度v和折算到电动机轴上的静态转矩TL以及折算到电动机轴上整个拖动系统的飞轮惯量GD2z.。ωM=3.14*2n/60=99.43rad/s.提升重物的轴上的角速度ω=ωM/j1j2j3=99.43/4*4*2=3.11rad/s5
v=ωD/2=0.24/2*3.11=0.373m/sTL=9.55FV/ηCnM=9.55*100*0.373/0.83*950=0.45NMGD2Z=δGDM2+GDL2/jL2=1.25*1.05+100*0.242/322=1.318NM22.9一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载?可分为1恒转矩型机械特性2离心式通风机型机械特性3直线型机械特性4恒功率型机械特性,4种类型的负载.2.10反抗静态转矩与位能静态转矩有何区别,各有什么特点?反抗转矩的方向与运动方向相反,,方向发生改变时,负载转矩的方向也会随着改变,因而他总是阻碍运动的.位能转矩的作用方向恒定,与运动方向无关,它在某方向阻碍运动,而在相反方向便促使运动。2.11在题2.11图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点?哪些不是?5
交点是系统的稳定平衡点.交点是系统的稳定平衡点交点是系统的稳定平衡交点不是系统的稳定平衡点交点是系统的稳定平衡点5'
您可能关注的文档
- 本科英语自学考试《口译与听力》课后习题答案.doc
- 朱占峰版《报关实务》课后练习答案.doc
- 机械制造基础习题集和答案.doc
- 机械制造工艺学清华大学出版社课后习题答案.doc
- 机械制造技术基础(第2版)第二章课后习题答案.doc
- 机械制造装备设计第四章习题答案(关慧贞).doc
- 机械工程材料_习题集答案.doc
- 机械工程材料课后习题答案.doc
- 机电传动第5章习题答案.doc
- 杨谦主编《水法规与行政执法》 - 课后问答题全部答案.doc
- 校园网-中国近代史纲要课后思考题参考答案[1].doc
- 核舟记练习题及答案.doc
- 桃花源记练习题完整练习及答案.docx
- 梁小民《西方经济学 第二版》第七章课后习题答案.doc
- 植物学练习题及答案.docx
- 概率论与数理统计课后习题答案.doc
- 毕晓方改编+《财务会计》的课后习题答案第九章习题答案.doc
- 毕晓方改编+《财务会计》的课后习题答案第二章习题答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明