

- 144.00 KB
- 2022-04-22 11:39:37 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'《现代控制论》复习内容考试注意事项:1.不准携带任何答案和书籍,违者零分处理。2.需携带电子计算器3.希望大家认真复习一、复习内容第一章:1.1状态变量及状态空间表达式1.2状态空间表达式的模拟结构图1.3状态空间表达式的建立(一)其中重点复习:从系统的机理出发建立状态空间表达式(例1-5直流他励电动机),1.4状态空间表达式的建立(二)其中重点复习:传递函数中没有零点时的实现。1.6从状态空间表达式求传递函数第二章2.1线性定常齐次状态方程的解(定义法求解,标准型求解,利用拉氏反变换求解,应用凯莱-哈密顿定理求解,在做题时可以采用其中一种)2.5离散时间系统状态方程的解(需要仔细看理论部分的求解过程,具体可以参考例2-11)第三章3.1能控性的定义3.2线性定常系统的能控性判别(转换成标准型进行判别,或者直接由A和B判别,可参考例3-1,例3-2,例3-3,例3-4,例3-5,考试时可选一种方式进行判别)3.9传递函数矩阵的实现问题(重点复习最小实现,可参考例3-19,例3-20)第四章4.1李雅普诺夫关于稳定性的定义4.2李雅普诺夫第一法(可参考例4-1,例4-2)4.3李雅普诺夫第二法(例4-4,例4-5,例4-6,例4-7,例4-8)4.4李雅普诺夫方法在线性系统中的应用(例4-9,例4-10,例4-11)二、课后习题答案第一章(解题方法可以参考书中例题和讲义,略)第二章2.4:求解过程可参考书中的四种方法
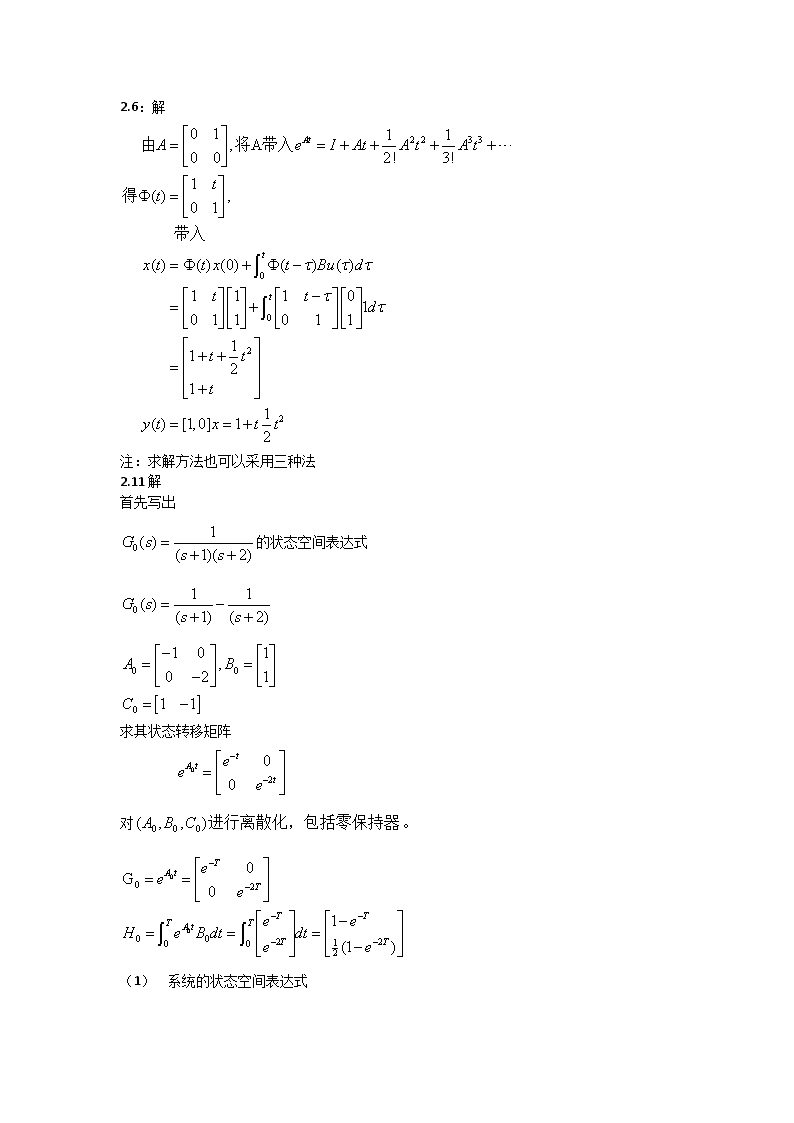
2.6:解注:求解方法也可以采用三种法2.11解首先写出的状态空间表达式求其状态转移矩阵对。(1)系统的状态空间表达式
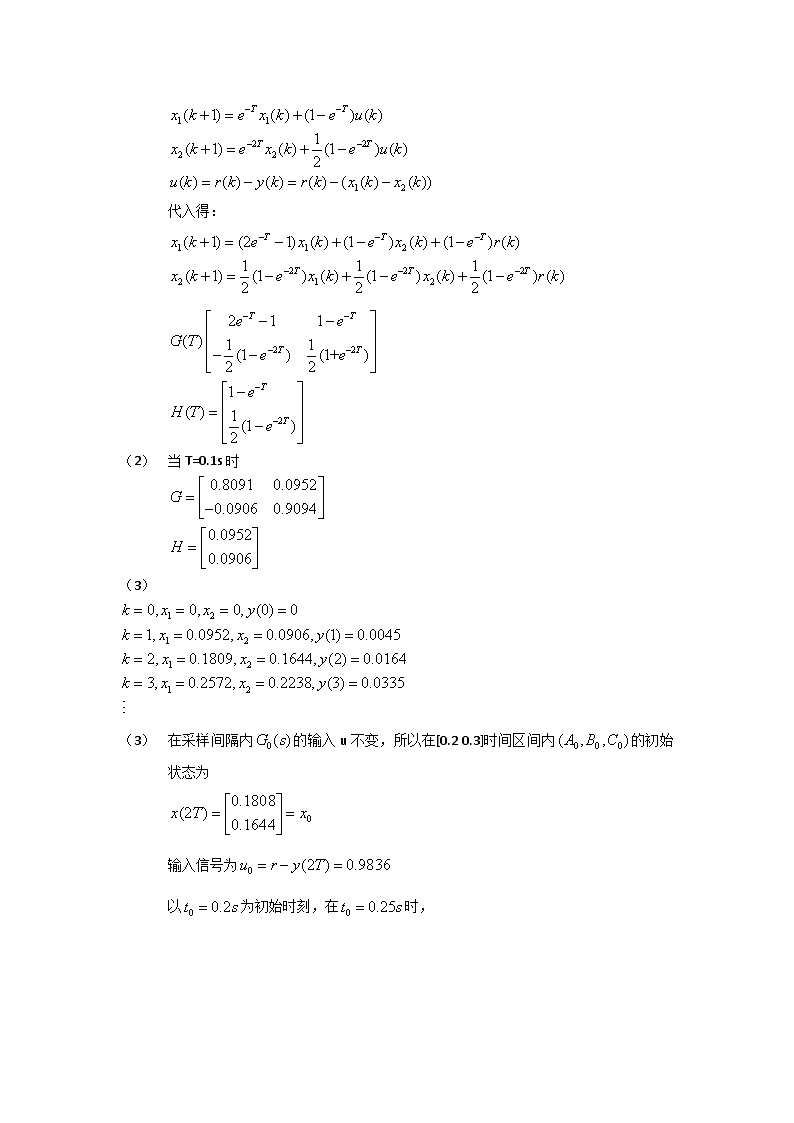
代入得:(1)当T=0.1s时(3)(2)在采样间隔内的输入u不变,所以在[0.20.3]时间区间内的初始状态为输入信号为以为初始时刻,在时,
第三章3.2解系统不能控系统能观3.14(1)先写出系统的能控标准型实现进行能观性分解,取系统的最小实现为
验算注意在在判断可观测性时刻使用约旦标准型的判别方法,由于-1整个特征值对应两个约旦块,而它们对应Cc的列线性相关,尽管都不是零,但是不能观测的。第四章4.1利用Lyapunov第一方法判断系统平衡点的稳定性。解:的特征值为,具有正实部,所以系统在平衡点不稳定。4.2取,通过求解Lyapunov方程判断系统平衡点的稳定性。解:令
,正定,大范围一致渐近稳定'
您可能关注的文档
- 混凝土结构设计原理复习题及参考答案.doc
- 湖南省2010年《会计基础》教材各章练习题答案及解析.doc
- 熊勇清《管理学》第三版课后题答案.doc
- 特种加工习题及答案.pdf
- 王万生《计算机组成原理》清华大学出版社完整答案.doc
- 王万生《计算机组成原理实用教程》课后习题答案.doc
- 环境化学 戴树桂 第二章 课后习题答案.doc
- 环境化学(戴树桂)课后习题参考答案.doc
- 现代微型计算机与接口教程(杨文显)第五章课后答案.doc
- 现场总线郭琼习题答案.doc
- 生化3-13答案.doc
- 生化练习题答案.doc
- 生态学复习题集答案.doc
- 电力市场概论A习题集答案.doc
- 电大《人力资源管理》期末复习综合练习题答案(2011最全).doc
- 电大《哲学引论》习题及答案.doc
- 电大《心理咨询入门》期末复习题参考答案doc.pdf
- 电大《教育学》期末复习题及答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明