

- 560.00 KB
- 2022-04-22 11:28:23 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'《机械制造装备设计》关慧贞第三版课后习题答案1-1为什么说机械制造装备在国民经济发展中起着重要的作用?制造业是国民经济发展的支柱产业,也是科技技术发展的载体及使其转化为规模生产力的工具和桥梁。装备制造业是一个国家综合制造能力的集中表现,重大装备研制能力是衡量一个国家工业化水平和综合国力的重要标准。1-2机械制造装备与其他工业化装备相比,特别强调应满足哪些要求?为什么?柔性化精密化自动化机电一体化节材节能符合工业工程要求符合绿色工程要求1-3柔性化指的是什么?试分析组合机床、普通机床、数控机床、加工中心和柔性制造系统的柔性化程度。其柔性表现在哪里?柔性化有俩重含义:产品机构柔性化和功能柔性化。数控机床、柔性制造单元或系统具有较高的功能柔性化程度。在柔性制造系统中,不同工件可以同时上线,实现混流加工。组合机床其柔性表现在机床可进行调整以满足不同工件的加工。1-7对机械制造装备如何进行分类?加工装备:采用机械制造方法制造机器零件的机床。工艺装备:产品制造是用的各种刀具、模具、夹具、量具等工具。仓储运输装备:各级仓库、物料传送、机床上下料等设备。辅助装备:清洗机和排屑装置等设备。1-9机械制造装备设计有哪些类型?他们的本质区别是什么?类型:创新设计、变型设计和模块设计1-12哪些产品宜采用系列化设计方法?为什么?有哪些优缺点?系列化设计方法是在设计的某一类产品中,选择功能、结构和尺寸等方面较典型产品为基型,运用结构典型化、零部件通用化、标准化的原则,设计出其他各种尺寸参数的产品,构成产品的基型系列。优点:1)用较少品种规格的产品满足市场较大范围的需求。2)可以减少设计工作量,提高设计质量,减少产品开发的风险,缩短产品的研制周期。3)可以压缩工艺装备的数量和种类,有助于缩短产品的研制周期,降低生产成本。4)零备件的种类少,系列中的产品结构相似,便于进行产品的维修,改善售后服务质量。5)为开展变型设计提供技术基础缺点:用户只能在系类型谱内有限的品种规格中选择所需的产品,选到的产品,一方面其性能参数和功能特性不一定最符合用户的需求。另一方面有些功能还可能冗余。1-15设计的评价方法很多,结合机械制造装备设计,指出哪些评价方法极为重要,为什么?技术经济评价可靠性评价人机工程学评价结构工艺性评价产品造型评价标准化评价2-1机床设计应满足哪些基本要求?其理由是什么?工艺范围、柔性、与物流系统的可亲性、刚度、精度、噪声、成产率自动化、成本、生产周期、可靠性、造型与色彩2-4机床系列型谱的含义是什么?为了以最少的品种规格,满足尽可能多用户的不同需求,通常是按照该类机床的主参数标准,先确定一种用途最广、需要量较少的机床系列作为“基型系列”,在这系列的基础上,根据用户的需求派生出若干种变型机床,形成“变型系列”。“基型”和“变型”构成了机床的“系类型谱”。2-5机床的基本工作原理是什么?通过刀具与工件之间的相对运动,由刀具切除工件加工表面多余的金属材料,使工件具有要求的几何形状和尺寸。2-7工件表面发生线的形成方法有哪些?轨迹法、成形法、相切法、展成法2-20机床的主参数及尺寸参数根据什么确定?通用机床的主参数和主参数系列国家已制订标准,设计时可根据市场的需求在主参数系列标准中选用相近的数值。专用机床的主参数是以加工零件或被加工面的尺寸参数来表示,一般也参照类似的通用机床主参数系列选取。2-23机床主传动系都有哪些类型?由哪些部分组成?按驱动主传动的电动机类型:交流电动机驱动、直流电动机驱动
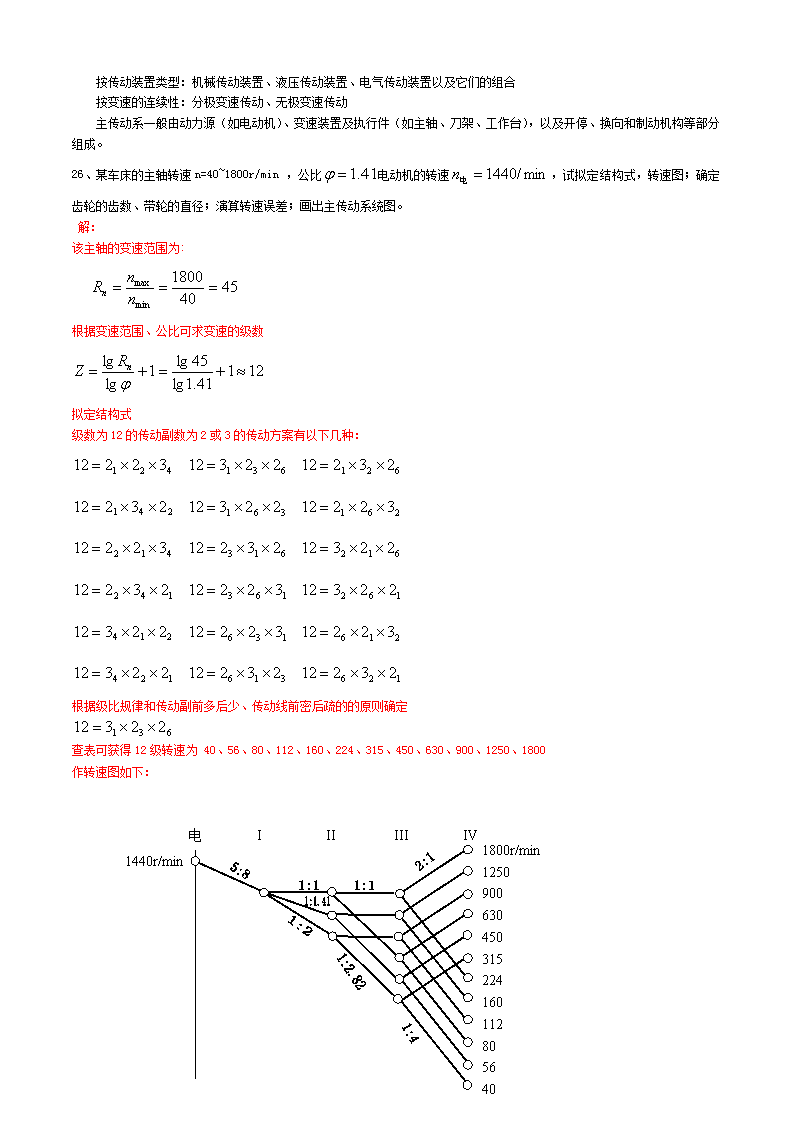
按传动装置类型:机械传动装置、液压传动装置、电气传动装置以及它们的组合按变速的连续性:分极变速传动、无极变速传动主传动系一般由动力源(如电动机)、变速装置及执行件(如主轴、刀架、工作台),以及开停、换向和制动机构等部分组成。26、某车床的主轴转速n=40~1800r/min,公比电动机的转速,试拟定结构式,转速图;确定齿轮的齿数、带轮的直径;演算转速误差;画出主传动系统图。解:该主轴的变速范围为:根据变速范围、公比可求变速的级数拟定结构式级数为12的传动副数为2或3的传动方案有以下几种:根据级比规律和传动副前多后少、传动线前密后疏的的原则确定查表可获得12级转速为40、56、80、112、160、224、315、450、630、900、1250、1800作转速图如下:40568011216022431545063090012501800r/min1440r/min电IIIIIIIV
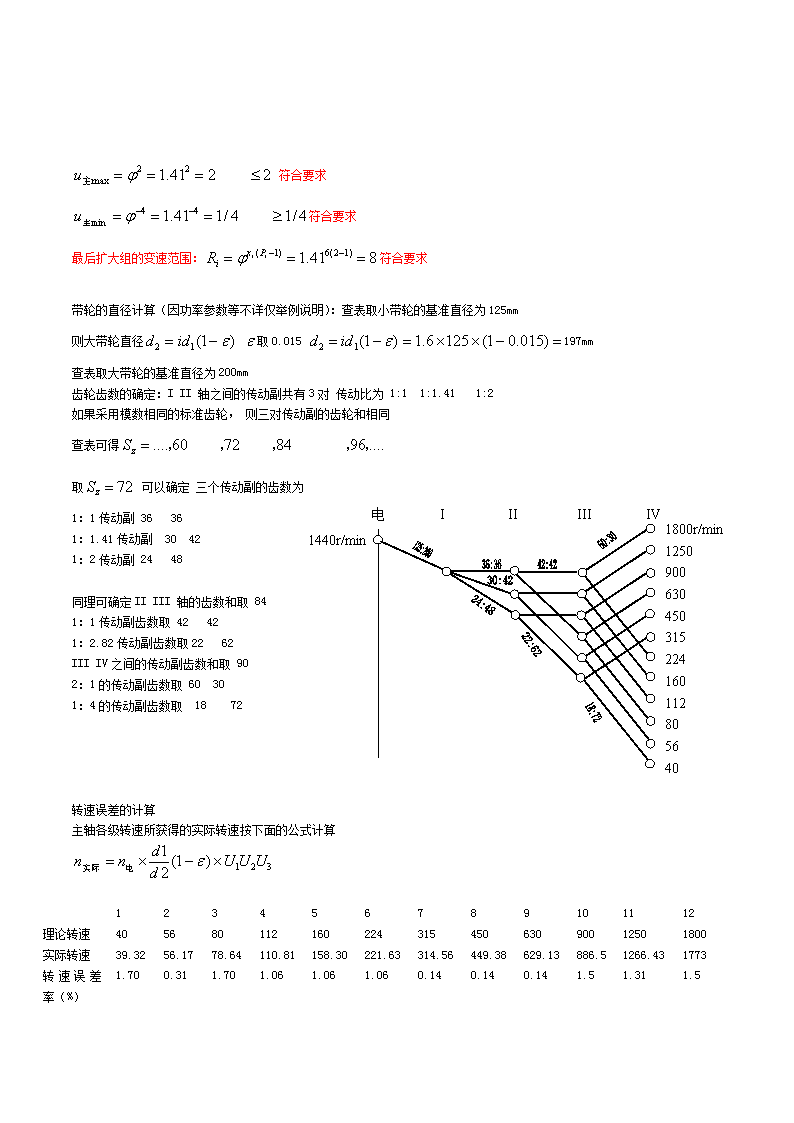
符合要求符合要求最后扩大组的变速范围:符合要求带轮的直径计算(因功率参数等不详仅举例说明):查表取小带轮的基准直径为125mm则大带轮直径取0.015197mm查表取大带轮的基准直径为200mm齿轮齿数的确定:III轴之间的传动副共有3对传动比为1:11:1.411:2如果采用模数相同的标准齿轮,则三对传动副的齿轮和相同查表可得40568011216022431545063090012501440r/min电IIIIIIIV取可以确定三个传动副的齿数为1800r/min1:1传动副36361:1.41传动副30421:2传动副2448同理可确定IIIII轴的齿数和取841:1传动副齿数取42421:2.82传动副齿数取2262IIIIV之间的传动副齿数和取902:1的传动副齿数取60301:4的传动副齿数取1872转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算123456789101112理论转速40568011216022431545063090012501800实际转速39.3256.1778.64110.81158.30221.63314.56449.38629.13886.51266.431773转速误差率(%)1.700.311.701.061.061.060.140.140.141.51.311.5
允许误差:根据上表可知转速误差率在允许的范围内绘制传动系统图如下:36243036484242224262601830721440r/min27、某机床主轴转速n=100~1120r/min,转速级数,电动机的转速,试设计该机床的主传动系,包括拟定结构式和转速图,画出主传动系统图。1.41查表可获得8级转速为100,140,200,280,400,560,800,1120拟定8级转速的结构式:根据级比规律和传动副前多后少、传动线前密后疏的的原则确定
10014020028040056080011201440r/min电IIIIIIIV符合要求符合要求最后扩大组的变速范围:符合要求带轮的直径计算(因功率参数等不详仅举例说明):查表取小带轮的基准直径为125mm则大带轮直径取0.015221.625mm查表取大带轮的基准直径为224mm齿轮齿数的确定:III轴之间的传动副共有2对传动比为1:11:1.41如果采用模数相同的标准齿轮,则三对传动副的齿轮和相同查表可得取可以确定两个传动副的齿数为1:1传动副24241:1.41传动副2028同理可确定IIIII轴的齿数和取601:1传动副齿数取30301:2传动副齿数取2040IIIIV之间的传动副齿数和取721.41:1的传动副齿数取42301:2.82的传动副齿数取1953转速误差的计算
主轴各级转速所获得的实际转速按下面的公式计算12345678理论转速1001402002804005608001120实际转速100.98141.25201.78282.49394551.67881103.2转速误差率(%)0.890.890.890.891.51.51.51.5允许误差:根据上表可知转速误差率在允许的范围内绘制传动系统图如下:20242830203040421930531440r/min2428试从,级变速机构的各种传动方案中选出最佳方案,并写出结构式,画出转速图和传动系统图。转速不重复的方案:
转速重复的方案等根据级比规律和传动副前多后少、传动线前密后疏的的原则确定也可选择转速重复的方案。假定最小转速为31.5r/min查表可得各级转速为31.5,40,50,63,80,100,125,160,200,250,315,400,500,630,800,1000,1250,1600。125160200250315400500630800100012501600r/min1440r/min电IIIIIIIV31.540506380100符合要求符合要求最后扩大组的变速范围:符合要求带轮的直径计算(因功率参数等不详仅举例说明):查表取小带轮的基准直径为125mm则大带轮直径取0.015221.625mm查表取大带轮的基准直径为224mm齿轮齿数的确定:III轴之间的传动副共有2对传动比为1:11:1.251:1.6如果采用模数相同的标准齿轮,则三对传动副的齿轮和相同查表可得
取可以确定三个传动副的齿数为1:1传动副36361:1.25传动副32401:1.6传动副2844同理可确定IIIII轴的齿数和取841:1传动副齿数取42421:2传动副齿数取28561:4传动副齿数取1767IIIIV之间的传动副齿数和取902:1的传动副齿数取60301:4的传动副齿数取187232283628564217601830404436425667721440r/min转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算123456789理论转速31.540506380100125160200实际转速31.8139.9849.9962.6878.898.5125.36157.6197转速误差率(%)0.980.030.030.511.51.50.291.51.5
101112131415161718理论转速250315400500630800100012501600实际转速254.47319.90399.88492.5630.47881002.91260.81576转速误差率(%)1.791.511.50.030.6351.50.290.8641.5允许误差:根据上表可知转速误差率在允许的范围内29、用于成批生产的车床,主轴转速45~500r/min,为简化机构选用双速电机,n电=720r/min和1440r/min,试画出该机床的转速度和传动系统图。采用双速电机时公比一般取1.41和1.26本例中取1.41查表可获得8级转速为45,63,90,125,180,250,360,500拟定8级转速的结构式:选用多速电机是将多速电机作为第一扩大组放在传动式前面基本组放在第一扩大组的后面因此确定最后的结构式为I轴的带轮转速为720r/min查表取小带轮的基准直径为125mm则大带轮直径取0.015246.25mm查表取大带轮的基准直径为250mm4563901251802503605001440r/min电IIIIII72010001440720r/min
符合要求符合要求最后扩大组的变速范围:符合要求齿轮齿数的确定:III轴之间的传动副共有2对传动比为1:21:2.82如果采用模数相同的标准齿轮,则三对传动副的齿轮和相同查表可得取可以确定三个传动副的齿数为1:2传动副23461:2.82传动副1851同理可确定IIIII轴的齿数和取721.41:1传动副齿数取42301:2.82传动副齿数取1953231846194230531440r/min51720r/min转速误差的计算主轴各级转速所获得的实际转速按下面的公式计算12345678理论转速456390125180250360500实际转速44.8763.5689.73127.12175.21248.22350.43496.44转速误差率(%)0.2970.890.2971.72.660.712.660.71
允许误差:根据上表可知转速误差率在允许的范围内33、某数控机床,主轴最高转速,最低转速,计算转速为,采用直流电动机,电动机功率=15kw,电动机的额定转速,最高转速为,试设计分级变速箱的传动系,画出转速图和功率特性图,以及主传动系统图。主轴要求的很功率范围为电机所能达到的恒功率范围取=4.06取Z=4机械分级结构式可写作45004000400020003202000150013331333100010006676675005003603331671671608040r/min403.6KW15KW电机的恒功率范围为1500~4500r/min
经过1:1.1251:11:1三对传动副在主轴可获得的功率范围为1333~4000r/min(红色)经过1:1.1251:21:1三对传动副在主轴可获得的功率范围为667~2000r/min(黑色)经过1:1.1251:11:4三对传动副在主轴可获得的功率范围为333~1000r/min(绿色)经过1:1.1251:21:4三对传动副在主轴可获得的功率范围为167~500r/min(蓝色)四段之间互有搭接40~167r/min用的是电机的恒转矩段40r/min的主轴转速对应的电机的转速为40r/min的主轴转速对应的电机消耗的功率为15KW直流电机制动与测速机构4572454518脉冲发生器3072454030202-36进给传动与主传动相比较,有哪些不同点?1)进给传动是恒转矩传动2)进给传动系中各传动件的计算转速是其最高转速3)进给传动的转速图为前疏后密结构4)进给传动的变速范围5)进给传动系采用传动间隙消除机构6)快速空程传动的采用7)微量进给机构的采用2-37进给伺服系的驱动部件有哪几种类型?其特点和应用范围怎样?步进电动机、直流伺服电动机、交流伺服电动机、直线伺服电动机2-39机床控制系统有几种分类方法?是如何进行分类的?按自动化程度分类:手动、机动、半自动、自动控制系统。按控制系统是否有反馈:开环、半闭环、闭环控制系统。按控制方式和内容分类:时间控制、程序控制、数字控制、误差补偿控制和自适应控制
3-1主轴部件应满足哪些基本要求?旋转精度、刚度、抗振性、温升和热变形、精度保持性3-11根据什么原则选择支承件的截面形状,如何布置支承件上的助板和助条?1)无论是方形、圆形或矩形,空心截面的刚度都比实心的大,而且同样的断面形状和相同大小的面积,外形尺寸大而壁薄的截面,比外形尺寸小而壁厚的截面的抗弯刚度和抗扭刚度都高。所以为提高支承件的刚度,支承件的截面应是中空形状,尽可能加大截面尺寸,在工艺可能的条件下壁厚尽量薄一些。2)圆(环)形截面抗扭刚度好于方形,抗弯刚度比方形低;以承受弯矩为主的支承件的截面形状应取矩形,并以其高度方向为受弯方向;以承受转矩为主的支承件的截面形状取圆(环)形。3)封闭截面的刚度远远大于开口截面的刚度,特别是抗扭刚度。截面应尽可能设计成封闭形状。助板的布置取决去支承件的受力方向。肋条置于支承件某一内壁上,主要为了减小局部变形和薄壁振动,用来提高支承件的局部刚度。3-12提高支承件结构刚度和动态性能有哪些措施?提高支承件结构刚度的主要方法是:根据支承件受力情况合理的选择支撑件的材料、截面形状和尺寸、壁厚,合理的分布肋板和肋条。提高动态性能的方法:1、改善阻尼特性2、采用新材料制造支承件3-14镶条和压板有什么作用?镶条:镶条用来调整矩形导轨和燕尾形导轨的侧向间隙,镶条应放在导轨受力较小的一侧压板:压板用来调整辅助导轨面的间隙,承受颠覆力矩,用配刮垫片来调整间隙3-16提高导轨精度、刚度和耐磨性的措施1)合理选择导轨的材料和热处理2)导轨的预紧3)导轨的良好润滑和可靠防护4)保证完全的液体润滑,用油膜隔开相接触的导轨面,加大导轨的接触面和减轻负载,争取磨损要使摩擦面上的压力分布均匀。导轨的形状尺寸要尽可能对集中负载对称。3-21加工中心上刀库的类型有哪些?鼓轮式刀库、链式刀库、格子箱式刀库和直线式刀库3-23典型换刀机械手有哪几种?各有何特点?适用范围如何?1)单臂双手爪型机械手:这种机械手的拔刀、插刀动作都由液压动作来完成,根据结构要求,可以采取液压缸动、活塞固定;或活塞动、液压缸固定的结构形式。这种液压缸活塞的密封松紧要适当,太紧了往往影响机械手的正常动作,要保证既不漏油又使机械手能灵活动作。2)双臂单手爪交叉型机械手:应用有JCS—013型卧式加工中心3)单臂双手爪且手臂回转轴与主轴成45°的机械手:这种机械手换刀动作可靠,换刀时间短,但对刀柄精度要求高,结构复杂,联机调整的相关精度要求较高,机械手离加工区较近。4)手抓。5)钳形杠杆机械手。5-2机床夹具的组成有哪些部分?定位元件及装置、夹紧元件及装置、导向及对刀元件、机床连接元件、夹具体、其它元件及装置5-3何谓六点定位原理?何谓定位的正常情况和非正常情况?他们各包括哪些方面?原理:采取适当约束措施,消除工件的六个自由度,实现工件定位。定位的正常情况:根据加工表面的位置尺寸要求,需要限制的自由度均已被限制(可以是完全定位、不完全定位)定位的非正常情况1)欠定位:需要限制的自由度没有完全被限制 2)过定位:某个自由度被两个或两个以上的约束重复限制5-7加紧和定位有何区别?对夹紧装置的基本要求有哪些?工件通过夹具上的定位元件获得正确的位置,称为定位通过夹紧机构使工件的既定位置在加工过程中保持不变,称为夹紧基本要求:1)保证加工精度
2)夹具的总体方案应与年生产纲领相适应3)安全、方便、减轻劳动强度4)排屑顺畅5)机床夹具应有良好的强度、刚度和结构工艺性5-10使用夹具来加工工件时,产生加工误差的因素有哪些方面?他们与零件的公差有何关系?1)工件在夹具中的安装误差,它包括定位误差和夹紧误差2)夹具在机床上对定误差,指夹具相对于刀具或相对于机床成形运动的位置误差。3)加工过程中出现的误差第三项一般不易估算,夹具精度验算是指前俩项的和不大于工件误差的2/3为合格,定位误差一般不大于工件误差的1/3为合格。'
您可能关注的文档
- 《有机化学》(第四版)第三章 不饱和烃(习题答案).doc
- 《有机化学》_习题答案.doc
- 《有机化学》傅建熙 第三版 课本答案.doc
- 《有机电子学》思考题及答案1.doc
- 《机械优化设计》复习题答案.pdf
- 《机械优化设计》孙靖民哈尔滨工业大学课后答案.pdf
- 《机械几何精度设计》习题参考答案.doc
- 《机械制造技术基础》下册习题答案 2.doc
- 《机械制造技术基础》复习题答案.doc
- 《机械制造装备设计》关慧贞第三版课后习题答案.pdf
- 《机械原理》(武汉大学)课后习题参考答案.doc
- 《机械原理》复习题及答案.doc
- 《机械基础》习题答案.doc
- 《机械工程测试技术基础》(第三版熊诗波_黄长艺)课后习题及答案详解.doc
- 《机械工程测试技术基础》第三版课后习题答案.pdf
- 《机械工程测试技术基础》课后习题及答案详解.doc
- 《机械设计-吴昌林》课后习题答案(部分).pdf
- 《机械设计》(第八版)课后习题答案(全共32页).doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明