

- 870.00 KB
- 2022-04-22 11:32:43 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
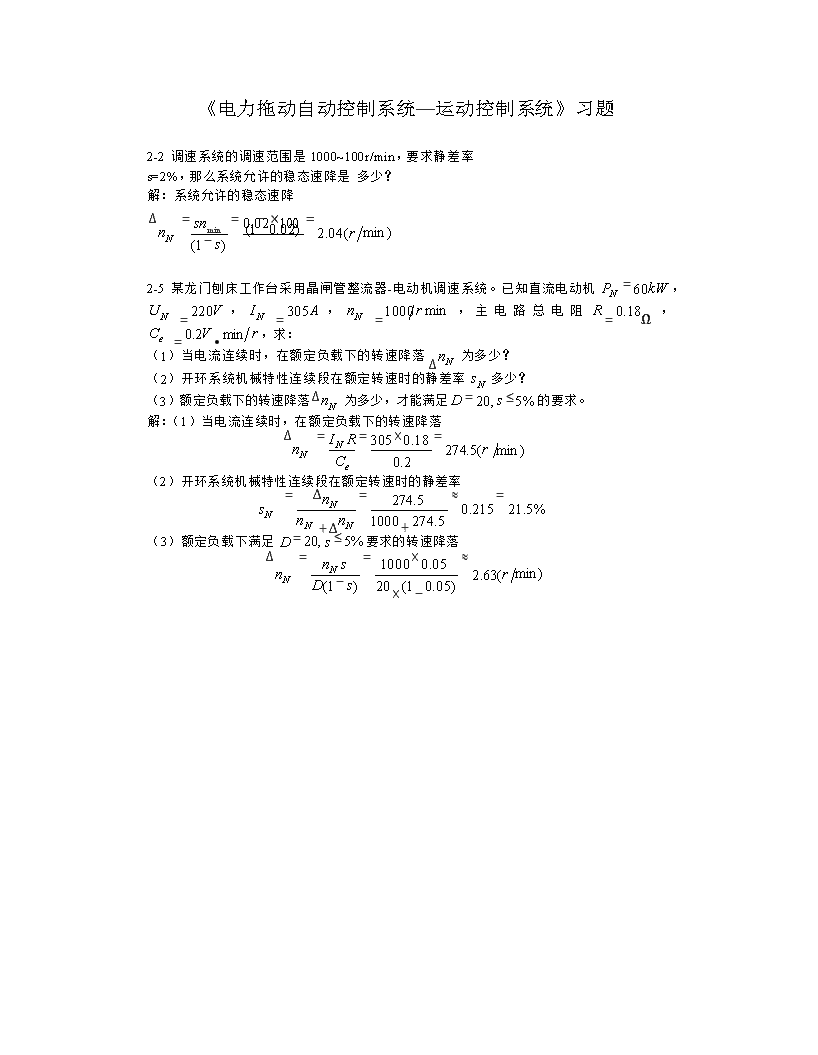
'《电力拖动自动控制系统—运动控制系统》习题2-2调速系统的调速范围是1000~100r/min,要求静差率s=2%,那么系统允许的稳态速降是多少?解:系统允许的稳态速降∆nN=snmin(1−s)=0.02×100(1−0.02)=2.04(rmin)2-5某龙门刨床工作台采用晶闸管整流器-电动机调速系统。已知直流电动机PN=60kW,UN=220V,IN=305A,nN=1000rmin,主电路总电阻R=0.18Ω,Ce=0.2V•minr,求:(1)当电流连续时,在额定负载下的转速降落∆nN为多少?(2)开环系统机械特性连续段在额定转速时的静差率sN多少?(3)额定负载下的转速降落∆nN为多少,才能满足D=20,s≤5%的要求。解:(1)当电流连续时,在额定负载下的转速降落∆nN=INR=305×0.18=274.5(rmin)Ce0.2(2)开环系统机械特性连续段在额定转速时的静差率nsN=N∆nN+∆nN=274.5≈0.215=21.5%1000+274.5(3)额定负载下满足D=20,s≤5%要求的转速降落∆nN=nNsD(1−s)=1000×0.0520×(1−0.05)≈2.63(rmin)
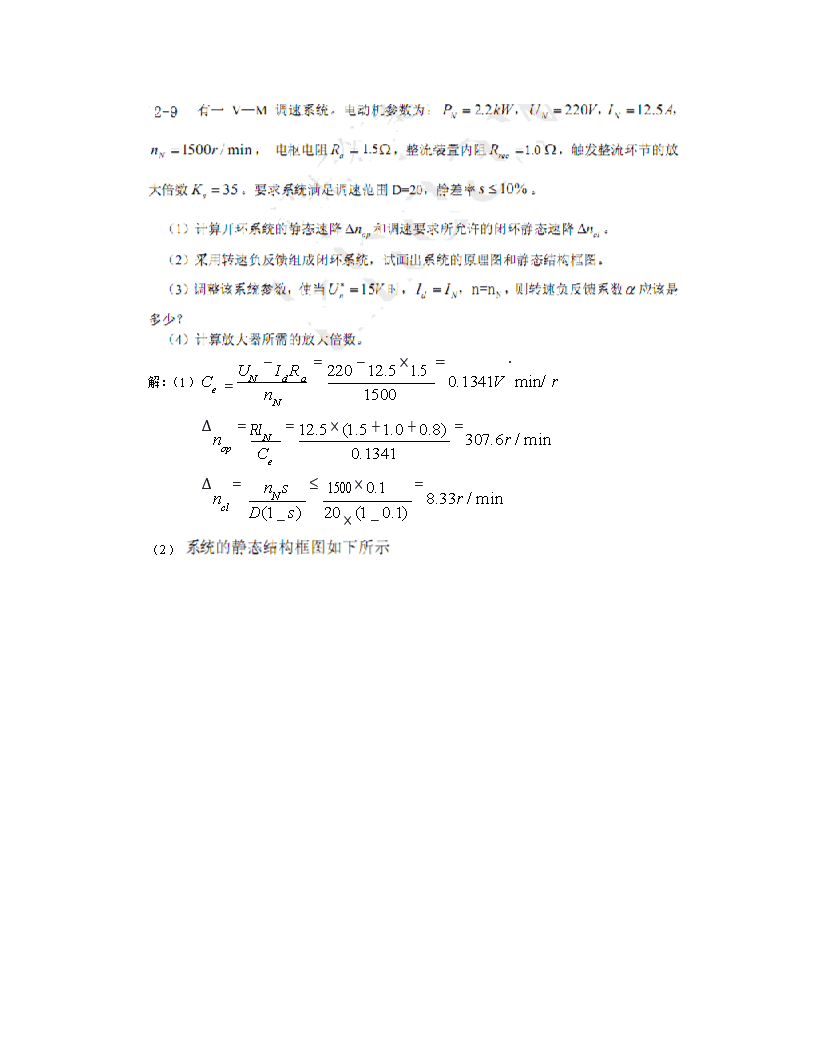
UN解:(1)Ce=−IdRanN=220−12.5×1.5=0.1341V⋅min/r1500∆nop=RINCe=12.5×(1.5+1.0+0.8)0.1341=307.6r/min(2)∆n=nNs≤1500×0.1=8.33r/minclD(1−s)20×(1−0.1)
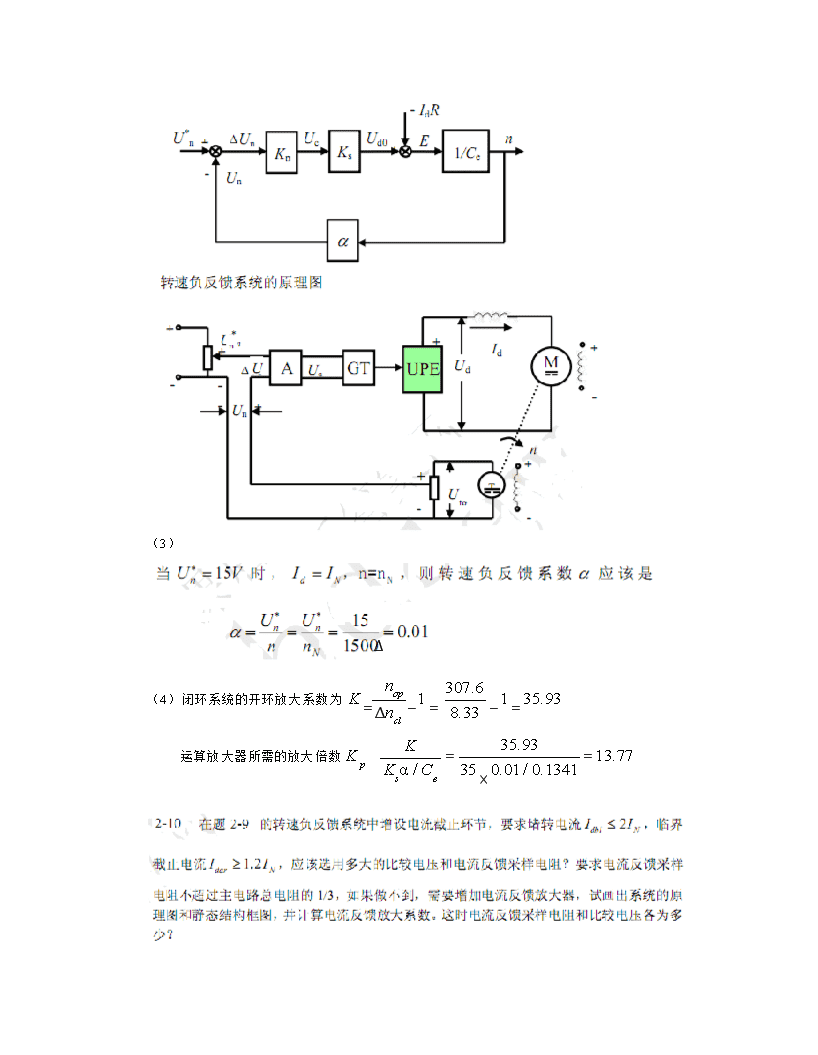
(3)∆nop307.6(4)闭环系统的开环放大系数为K=−1=−1=35.93∆nclK8.3335.93运算放大器所需的放大倍数Kp=Ksα/Ce==13.7735×0.01/0.1341
解:R=4.8ΩRs/R=0.3125<1/3图见49页2-12有一晶闸管-电动机调速系统,已知:电动机PN=2.8kW,UN=220V,IN=15.6A,nN=1500rmin,Ra=1.5Ω,整流装置内阻Rrec=1Ω,电枢回路电抗器电阻RL=0.8Ω,触发整流环节的放大倍数Ks=35。求:(1)系统开环时,试计算调速范围D=30时的静差率s。
(2)当D=30,s=10%时,计算系统允许的稳态速降。ndN(3)如组成转速负反馈有静差调速系统,要求D=30,s=10%,在U*=10V时I=I,n=nN,计算转速反馈系数α和放大器放大系数Kp。解:先计算电动机的反电动势系数Ce=UN−INRanN=220−15.6×1.5=0.131(V•minr)1500系统开环时的额定转速降落IN(Ra+Rrec+RL)15.6×(1.5+1+0.8)C∆nNop=e=≈393(rmin)0.131(1)系统开环时,调速范围D=30时的静差率s=D∆nNnN+D∆nN=30×3931500+30×393≈0.887=88.7%;(2)当D=30,s=10%时,系统允许的稳态速降∆nN=nNsD(1−s)=1500×0.130×(1−0.1)≈5.56(rmin)(3)如组成转速负反馈有静差调速系统,要求D=30,s=10%,则系统开环放大系数∆nopK=−1=∆ncl393−1≈69.68;5.56α=n转速反馈系数U*nN=101500≈0.0067(V•minr)放大器放大系数Kp=KCeKsα=69.68×0.131≈38.93。35×0.0067Ci=Ri/τi=14µF
4h=3σ%=2(∆Cmax%)(λ−z)∆nNnCn*T∑n=63.4%Tbm5-1一台三相鼠笼异步电动机的铭牌数据为:额定电压UN=380V,额定转速nN=960rmin,额定频率fN=50Hz,定子绕组为Y联接。由实验测得定子电阻Rs=0.35Ω,定子漏感Lls=0.006H,定子绕组产生气隙主磁通的等效电感Lm=0.26H,转子电阻Rr′=0.5Ω,转子漏感Ll′r=0.007H,转子参数已折算到定子侧,忽略铁芯损耗。(1)画出异步电动机T形等效电路和简化电路。(2)额定运行时的转差率sN,定子额定电流I1N和额定电磁转矩。(3)定子电压和频率均为额定值时,理想空载时的励磁电流I0。(4)定子电压和频率均为额定值时,临界转差率sm和临界转矩Tem,画出异步电动机的机械特性。解:(1)异步电动机T形等效电路
异步电动机简化电路(2)由于额定转速nN=960rmin,同步转速n1=60fNnp=60×50=1000(r3min),额定运行时的转差率sN=n1−nn1=1000−9601000=0.04由异步电动机T形等效电路,C1=1+Rs+jω1LlsjωL=1+LlsL−jRs2πfL=1+0.0060.260.35−j≈1.023−j0.004≈1.023100π×0.261mmNm可得转子相电流幅值
Ir′=⎛+CRr′Us2+ω2(L+CL′)2⎞⎜R⎟⎜s1s⎟1ls1lr⎝N⎠=⎛⎜0.35+1.023×⎝=22020.5⎞⎟0.04⎠220+(100π)2×(0.006+1.023×0.007)2172.5939+17.0953=15.9735(A)气隙磁通在定子每相绕组中的感应电动势2⎜r⎟E=I′⎛R′⎞+ω2L′2=15.9735×156.25+4.8361≈202.7352(V)sgr1lr⎝N⎠额定运行时的励磁电流幅值I=Eg0ωL=202.7352≈2.482(A)100π×0.261m由异步电动机简化电路,额定运行时的定子额定电流幅值I1N=Us⎛+=R2′⎞+ω2(L=⎜+L′)2⎛0.35+0.5⎞220+(100π)2×(0.006+0.007)2⎝⎟2=⎝2s2⎠020.04⎠1⎜Rs.1225+⎟16.619lslr6576=16.316(4A)额定电磁转矩T=Pm3nR′3×30.5r=pI′2r=×15.97352×≈91.37(N⋅m)(依据T形等效电路)ωmω1sNe或100π0.04Pm3np2Rr′3×320.5Te==ωωI1Ns=×16.3164×≈95.33(N⋅m)(依据简化等效电路)m1N100π0.04(3)定子电压和频率均为额定值时,理想空载时的励磁电流I0=UsR2+ω2(L=+L)22200.352+(100π)2×(0.006+0.26)2=2.633(A)s1lsm(4)定子电压和频率均为额定值时,临界转差率sm=Rr′R2+ω2(L=+L′)20.50.352+(100π)2×(0.006+0.007)2=0.122s临界转矩Tem=1lslr3nU23×3×2202ps=2⎡RR22(LL)2⎤200×π×[0.35+0.352+(100π)2×(0.006+0.007)2]
=15ω51.83(sN+⋅m)s+ω1ls+l′r异步电动机的机械特性:
n1Sn0Sm10TemTe5-6异步电动机参数如习题5-1所示,输出频率f等于额定频率fN时,输出电压U等于额定电压UN,考虑低频补偿,若频率f=0,输出电压U=10%UN。(1)求出基频以下电压频率特性曲线U=f(f)的表达式,并画出特性曲线。(2)当f=5Hz和f=2Hz时,比较补偿与不补偿的机械特性曲线,两种情况下的临界转矩Temax。解:(1)UN=220(A)斜率
k=UN−0.1UNfN−0=220−22=3.96,50−0考虑低频补偿时,电压频率特性曲线U=3.96f+22;不补偿时,电压频率特性曲线(2)当f=5Hz时U=220f50=4.4fA、不补偿时,输出电压U=4.4fps3nU2T=em=22(V),临界转矩=3×3×2222⎡RR22(LL)2⎤20×π×[0.35+0.352+(10π)2×(0.006+0.007)2]=78ω.0184(sN+⋅m)s+ω1ls+l′rB、补偿时,输出电压U=3.96f+22=41.8(V)ps3nU23×3×41.82Tem=2⎡RR22(LL)2⎤=20×π×[0.35+0.352+(10π)2×(0.006+0.007)2]=28ω11.88s3(+N⋅ms)+ω1ls+l′r当f=2Hz时A、不补偿时,输出电压U=4.4fps3nU2T=em=8.8(V),临界转矩=3×3×8.822⎡RR22(LL)2⎤8×π×[0.35+0.352+(4π)2×(0.006+0.007)2]=37ω.6166(sN+⋅m)s+ω1ls+l′rB、补偿时,输出电压U=3.96f+22=29.92(V)ps3nU23×3×29.922Tem=2⎡RR22(LL)2⎤=8×π×[0.35+0.352+(4π)2×(0.006+0.007)2]ω1s+s+ω1ls+l′r5-8=两4电35平.41P9W(NM⋅m逆)变器主回路,采用双极性调制时,用“1“表示上桥臂开通,”0“表示上桥臂关断,共有几种开关状态,写出其开关函数。根据开关状态写出其电压矢量表达式,画出空间电压矢量图。解:
6-1按磁动势等效、功率相等原则,三相坐标系变换到两相静止坐标系的变换矩阵为C32=⎡12⎢1−2⎢−1⎤2⎥⎥3⎢03−=3⎥22⎥⎦现有三相正弦对称电流i=Isin(ωt)、i=Isin(ωt−2π)、i=Isin(ωt+2π),求AmBm3Cm3变换后两相静止坐标系中的电流isα和isβ,分析两相电流的基本特征与三相电流的关系。1⎡−1−⎡1⎤⎢⎤Imsin(ωt)⎥⎡isα⎤2⎢解:=22⎥⎢Isin(ωt−2π)⎥=3⎡Imsin(ωt)⎤;⎢⎥⎢⎥⎢m⎥⎢⎥⎣isβ⎦3⎢03−=3⎥⎢3⎥2⎣−Imcos(ωt)⎦22⎢Isin(ωt+2π)⎥m36-2两相静止坐标系到两相旋转坐标系的变换矩阵为⎡cosϕC2s2r=⎢⎣−sinϕsinϕ⎤⎦cosϕ⎥将习题6-1中的静止坐标系中的电流isα和isβ变换到两相旋转坐标系中的电流isd和isq,坐dϕ标系旋转速度为dt=ω1。分析当ω1=ω时,电流isd和isq的基本特征,电流矢量幅值=i+ii2sqssd2与三相电流幅值I的关系,其中ω是三相电源角频率。ω1>ω和ω1<ω时,misd和isq的表现形式。⎡isd⎤⎡cosϕsinϕ⎤3⎡Imsin(ωt)⎤3⎡Imsin(ωt−ϕ)⎤解:⎢⎥=⎢⎥⎢⎥=⎢⎥⎣isq⎦⎣−sinϕcosϕ⎦dϕ2⎣−Imcos(ωt)⎦2⎣−Imcos(ωt−ϕ)⎦由坐标系旋转速度为dt=ω1,则ϕ=ω1t+ϕ0(ϕ0为初始角位置)(1)当ω1=ω时,ϕ=ω1t=ωt+ϕ0,则isd=−isq=−
3Imsinϕ0,23Imcosϕ0,2223
is=isd+isq=Im;2(2)当ω1>ω和ω1<ω时,设ωs=ω1−ω,ωt−ϕ=−ωst−ϕ0,则⎡isd⎤3⎡Imsin(ωt−ϕ)⎤3⎡−Imsin(ωst+ϕ0)⎤⎢⎥=⎢⎥=⎢⎥。⎣isq⎦2⎣−Imcos(ωt−ϕ)⎦2⎣−Imcos(ωst+ϕ0)⎦'
您可能关注的文档
- 《现代经济学应用》练习题及答案(2013).doc
- 《现代通信原理》曹志刚清华大学出版社课后答案word版.doc
- 《生产与运营管理》练习题与参考答案.doc
- 《生产物流》复习题及答案.pdf
- 《生物化学》课后习题详细解答.doc
- 学简明教程》第四版_张丽萍_杨建雄_课后习题答案.doc
- 《用电监察员》中级工理论复习题及答案_2.doc
- 《用电监察员》中级工理论复习题合卷(含答案).doc
- 《田间试验与统计分析》第二版(明道绪 主编) 课后习题解答及复习资料 科学出版社.doc
- 《电力电子及技术》第五版部分习题答案.pdf
- 《电力电子技术(第二版)》课后习题及解答.doc
- 《电力电子技术》(第一二章)习题答案.doc
- 《电力电子技术》习题答案 王兆安.doc
- 《电力电子技术》习题答案(第四版).doc
- 《电力电子技术》习题答案(第四版,第五版,王兆安,王俊主编).doc
- 《电力电子技术》第四版课后习题答案.doc
- 《电力电子技术释疑与习题解析》4.3 习题提示与答案.pdf
- 《电力系统分析》综合练习题答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明