

- 279.50 KB
- 2022-04-22 11:35:47 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'《《《自动控制原理《自动控制原理》》》习题解答》习题解答(((非自动化类(非自动化类)))浙江工业大学王万良教材:::王万良:王万良,,,赵燕伟编著,赵燕伟编著,,,自动控制原理,自动控制原理,,,机械工业出版社,机械工业出版社,,,2009.32009.3
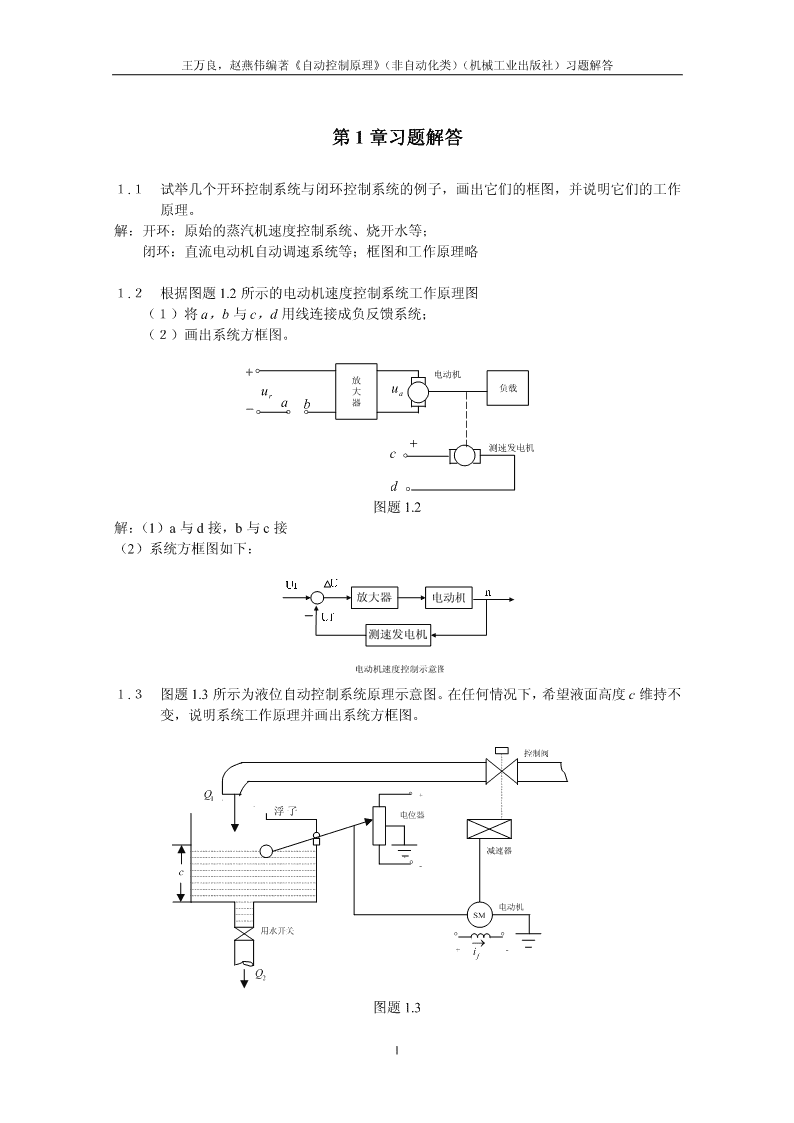
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答第第第1章习题解答1.1试举几个开环控制系统与闭环控制系统的例子,画出它们的框图,并说明它们的工作原理。解:开环:原始的蒸汽机速度控制系统、烧开水等;闭环:直流电动机自动调速系统等;框图和工作原理略1.2根据图题1.2所示的电动机速度控制系统工作原理图(1)将a,b与c,d用线连接成负反馈系统;(2)画出系统方框图。+o电动机放u大ua负载r-aoob器o+测速发电机codo-图题1.2解:(1)a与d接,b与c接(2)系统方框图如下:1.3图题1.3所示为液位自动控制系统原理示意图。在任何情况下,希望液面高度c维持不变,说明系统工作原理并画出系统方框图。控制阀Qo+1浮子电位器减速器o-c电动机SM用水开关oo®+i-fQ2图题1.31
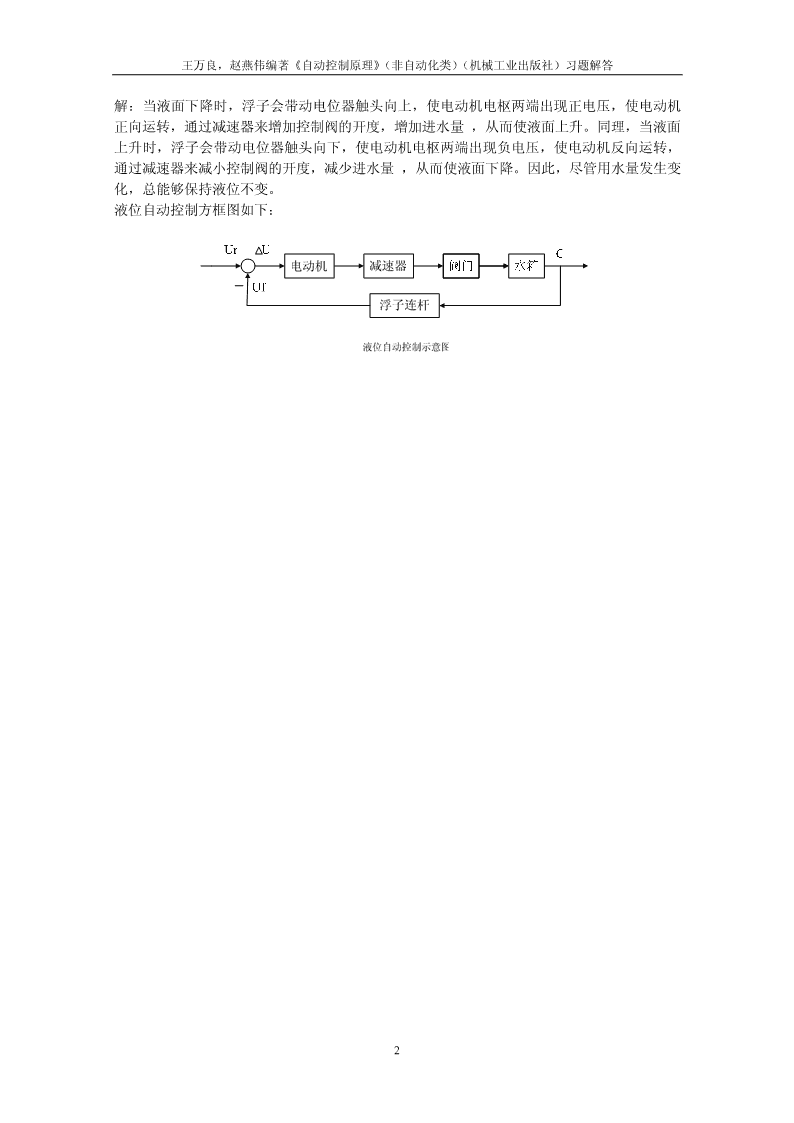
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答解:当液面下降时,浮子会带动电位器触头向上,使电动机电枢两端出现正电压,使电动机正向运转,通过减速器来增加控制阀的开度,增加进水量,从而使液面上升。同理,当液面上升时,浮子会带动电位器触头向下,使电动机电枢两端出现负电压,使电动机反向运转,通过减速器来减小控制阀的开度,减少进水量,从而使液面下降。因此,尽管用水量发生变化,总能够保持液位不变。液位自动控制方框图如下:2
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答第第第2章习题解答2.1试求下列函数的拉氏变换,设t<0时,x(t)=0:2(1)x(t)=2+3t+4t(2)x(t)=5sin2t-2cos2t1-t(3)x(t)=1-eT-4.0t(4)x(t)=ecos12t238解:(1)X(s)=++23sss10-2s(2)X(s)=2s+41(3)X(s)=T1s(s+)T(4)X(s)=s2(s+4.0)(s+144)2.2试求下列象函X(s)的拉氏反变换x(t):s(1)X(s)=(s+1)(s+)222s-5s+1(2)X(s)=2s(s+)123s+2s+8(3)X(s)=2s(s+2)(s+2s+)4解:-t-2t(1)-e+2e(2)1-5sint+cost-2t-t(3)1-2e-ecos3t2.3已知系统的微分方程为2dy(t)dy(t)+2+2y(t)=r(t)2dtdt·式中,系统输入变量为r(t)=s(t),并设y)0(=y)0(=0,求系统的输出y(t)。解:(1)对微分方程进行拉氏变换得2sY(s)+2sY(s)+2Y(s)=1(2)由上式求出系统输出量的表达式1Y(s)=2s+2s+2(3)对上氏进行拉氏反变换,求出y(t)。-ty(t)=-4esint此即为系统输出量y(t)的状态方程。3
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答2.4列写图题2.4所示RLC电路的微分方程。其中,ui为输入变量,uo为输出变量。RLuiCuo图题2.4解:设电路中电流为,则:duoi=C×dtiR+Ldi+u=uoidt2duduoo整理得:LC+RC+u=u2oidtdt2.5列写图题2.5所示RLC电路的微分方程,其中,u为输入变量,u为输出变量。ioLui(t)RCuo(t)图题2.5解:设流过L的电流为i,流经R的电流为i,流经C的电流为i,则:12i+i=i121idt=u()t∫2oC,iR1=uo()tdiuo()t+L=ui()tdt2duto()Lduto()整理得:LC2++uto()=uti()dtRdt2.6设运算放大器放大倍数很大,输入阻抗很大,输出阻抗很小。求图题2.6所示运算放大电路的传递函数。其中,ui为输入变量,uo为输出变量。RC1-i+uiuoR2图题2.6iR=uu()s11io解:,整理得传递函数为:=--1idt=uus()RCSi1∫oC4
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答C(s)2.7简化图题2.7所示系统的结构图,并求传递函数。R(s)R(s)C(s)G1(s)G2(s)--H1(s)H2(s)+图题2.7解:设G后为X,H前为Y,根据结构图写出线性代数方程组:11X=GRHY1(-1)Y=HC-X2C=GX2消去中间变量X,Y得传递函数为:Cs()GsGs()()=12Rs()1+GsGsHsHs()()()()-GsHs()()121211C(s)2.8简化图题2.8所示系统的结构图,并求传递函数。R(s)R(s)C(s)G1(s)G2(s)--H1(s)H2(s)图题2.8解:设G前为E,G前为X,根据结构图写出线性代数方程组:12E=RHHC-12X=GE-HC12C=XG2消除中间变量E,X得传递函数为:Cs()GsGs()()=12Rs()1+GsGsHsHs()()()()+GsHs()()121222C(s)2.9简化图题2.9所示系统的结构图,并求传递函数。R(s)G(s)1+R(s)G(s)C(s)-2图题2.9Cs()Gs()[1+Gs()]解:传递函数为:21=Rs()1+Gs()25
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答C(s)2.10简化图题2.10所示系统的结构图,并求传递函数。R(s)G1R(s)C(s)G2ÄÄG3_ÄG4图题2.10解:设G后为X,根据结构图写出线性代数方程组:4(C+XG)4=XC=(RG1+RG2-XG)3Cs()GsGs()[()+Gs()][1-Gs()]消去中间变量得传递函数为:=3124Rs()1+GsGs()()-Gs()344C(s)2.11简化图题2.11所示系统的结构图,并求传递函数。R(s)G4R(s)C(s)Ä_Ä_G1Ä_G2G3ÄH2H1图题2.11Cs()GsGs()()+GsGsGs()()()解:传递函数为:=14123Rs()1+GsGsH()()+GsH()+GsGsH()()+GsGsGsGsGs()()+()()()1214223214123C(s)2.12简化图题2.12所示系统的结构图,并求传递函数。R(s)G3(s)+R(s)+C(s)G1(s)G2(s)-G4(s)图题2.12Cs()GsG()[()s+Gs()]解:传递函数为:=123Rs()1+GsG()()sG()s1246
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答C(s)2.13简化图题2.13所示系统的结构图,并求传递函数。R(s)-R(s)C(s)G1(s)G2(s)--H(s)1图题2.13Cs()GsGs()()解:传递函数为:=12Rs()1+Gs()+Gs()+GsGsH()()121217
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答第第第3章习题解答3.1已知系统特征方程如下,试用劳斯判据判别系统稳定性,并指出位于右半S平面和虚轴上的特征根的数目。5432(1)Ds()=s+s+4s+4s+2s+=1065432(2)Ds()=s+3s+5s+9s+8s+6s+4=05432(3)D(s)=s+3s+12s+20s+35s+25=065432(4)D(s)=s+s-2s-3s-7s-4s-4=0解:(1)劳斯表结构如下:5s1424s1413se124e-1s1e21es1-4e-10s14e-1因为e是一个很小的正数,〈0,因此劳斯表第一列符号变化2次,所以系统不稳定,e有两个特征根在右半S平面。(2)劳斯表结构如下6s15845s396442s264®Fs()=2s+6s+433s46¬Fs"()=4s+6s2s3413s20s4求解F(s)=0可得s=±2,j±j4个虚跟,说明系统有4个根在虚轴上,临界稳定(3)劳斯表结构如下:6s112355s3202541680s3332s525®Fs()=s+52s2¬F"()s=2s1s25求F(s)=0可得s=±5j,系统有两个跟在虚轴上,临界稳定(4)劳斯表结构如下8
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答6s1-2-7-45s1-3-4442s1-3-4®Fs()=s-3s-43"3s4-6¬Fs()=4s-6s2s-3/2-41s-50/30s-4利用劳斯判据可得:劳斯表第一列数符号改变1次,又辅助方程有一正实根,所以系统有两个根在右半平面,两个跟在虚轴上,系统不稳定。3.2已知单位反馈系统的开环传递函数为s+2G(s)=232s(s+2s+9s+10)试用劳思判据判别系统稳定性。若系统不稳定,指出位于右半S平面和虚轴上的特征根的数目。5432解:闭环特征方程为:s+2s+9s+10s+s+2=05s1914s21023s4002s1021s-5/400s2第一列数的符号变化两次,所以有两特征根在右半S平面,系统不稳定。3.3已知单位负反馈控制系统的开环传递函数为2wKnvG(s)=22s(s+2zws+w)nn-1当w=90秒,阻尼比z=2.0时,试确定K为何值时系统是稳定的。nv解:由开环传递函数可得特征方程为32222D)s(=s+2zws+ws+Kw=0v劳斯表如下:32s1wn22s2zwKwnvn212zwn-Kvwns2z02sKwvn22由劳斯判据,系统稳定的充分必要条件为2zw-Kw>0,Kw>0,解上面的不等式,nvnvn-1保证系统稳定的K的取值范围为00,K>0解得010,即K>0.1稳定,当K=0.1时,临界稳定。这是非最小相位系统,K越hhhh大,系统越稳定。-60t-10t3.6已知系统的单位阶跃响应为c(t)=1+2.0e-2.1e,试求:(1)系统的传递函数;(2)系统的阻尼比V和自然振荡频率w。n-60t-10t解:(1)对单位阶跃响应为c(t)=1+2.0e-2.1e取L变换得12.02.16001C(s)=+-=ss+60s+10(s+60)(s+10)s600系统的传递函数为:F()s=(s+60)(s+10)22(2)由典型二阶系统得特征方程:D(s)=s+2zws+w=0nn2题中D(s)=s+70s+600=02比较可得2Vwn=70,wn=600,可解得:V=.143wn=245.10
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答3.7在零初始条件下,控制系统在输入信号r(t)=(1t)+t(1t)的作用下的输出响应为c(t)=t(1t),求系统的传递函数,并确定系统的调节时间ts。111解:将r(t)=(1t)+t(1t)与c(t)=t(1t)进行L变换得R)s(=+,C(s)=22sssC(s)1所以系统的传递函数为=R(s)s+1,3D=5T=1,ts=,4D=23.8设单位反馈系统的开环传递函数为1G(s)=s(s+)1试求:系统的上升时间t、超调时间t、超调量s%和调节时间t。rpps解:w=(1rad/s),V=1=5.0,w=w1-z2=.0866(rad/s)ndn2wn-1p-Jp-cos5.0t===.242srw.0866dpt==3.628spwdzp-21-zs%=e´100%=163.%p3=,6D=5zwnts=4=,8D=2zwn3.9要求图题3.9所示系统具有性能指标:s%10%=,t=0.5s。确定系统参数K和A,pp并计算tr,ts。R(s)KC(s)s(s+)1As图题3.9K解:系统的闭环传递函数为C(s)s(s+)1K==R(s)1+K1(+As)s2+1(+AK)s+Ks(s+)1可见,系统为典型二阶系统:wn2=K,2Vw=1+KAn-22-pV/1-V由s%=e´100%=10%,得:pV/1-V=ln10=.2302585,V=.0439n由t=p=5.0,得2ppw==.7782n2wn1-V1-V22Vw-1则K=w=605.,A=n=.0135;t=.029;t=.088(D=)5;t=.117(D=)2nrssK11
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答3.10图题3.10所示控制系统,为使闭环极点为s1,2=-±1j,试确定K和a的值,并确定这时系统阶跃响应的超调量。r(t)c(t)K2s1+as图题3.102K/sKK解f(s)===2221+K/s1(+as)s+K1(+as)s+Kas+K22-Ka±Ka-4Ks=2,122222-Ka±j4K-Ka要使s1,2=-±1j,则可知Ka-4K<0,即s1,2=2Ka=2224K-Ka=4K=2,a=1wn2=K=2,2Vw=Ka=2nV=.0707,s%=3.4%p3.11设典型二阶线性定常系统的单位阶跃响应曲线如图3.11所示(1)求阻尼比V和自然振荡频率wn;(2)画出等效的单位反馈系统结构图;(3)写出相应的开环传递函数。C(t)1.251t(秒)00.3图题3.11-zp2p1-z解(1)t==0.3,s%=e´100%=25%,z=0.4,w=11.4ppnwd(2)r(t)129.96c(t)-s(s+9.12)129.96(3)G(s)=s(s+9.12)12
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答3.12单位负反馈控制系统的开环传递函数为100Gs()=SS(+10)试求:(1)位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka;2⑵当参考输入r(t)=1+t+at时,系统的稳态误差终值。100解(1)K=limG(s)H(s)=lim=¥ps®0s®0s(s+10)100K=limsG(s)H(s)=lim=10vs®0s®0s+102100sK=limsG(s)H(s)=lim=0as®0s®0s+10R(2)r(t)=1时,e==01ss1+KpRr(t)=t时,e==0.12ssKv2Rr(t)=t时,e==¥3ssKae(¥)=¥ss3.13单位负反馈系统的开环传递函数为5G(s)=s(s+)1(1)求输入信号为r(t)=1.0t时系统的稳态误差终值;12(2)求输入信号为r(t)=.001t时系统的稳态误差终值。25解(1)K=limsG(s)H(s)=lim=5vs®0s®0(s+)1Re==0.02ssKv25s(2)K=limsG(s)H(s)=lim=0as®0s®0s+1Re==¥ssKa3.14单位负反馈系统的开环传递函数为KG(s)=(s+2)(s+)5求在单位阶跃信号的作用下,稳态误差终值e=1.0时的K值。ssK解K=limG(s)H(s)=lim=0.1Kps®0s®0(s+2)(s+)5R1e===0.1ss1+K1+0.1KpK=9013
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答3.15如图题3.15所示控制系统,其中e(t)为误差信号。n(t)c(t)r(t)e(t)1K0K(1+)PsTs(+1)TsI图题3.15(1)求rt()=t,nt()=0时,系统的稳态误差终值e;ss(2)求rt()=0,nt()=t时,系统的稳态误差e终值;ss(3)求rt()=t,nt()=t时,系统的稳态误差e终值;ss(4)系统参数K0,T,KP,TI变化时,上述结果有何变化?1s(Ts+)1解(1)f(s)==e1K011+K1(+)s(Ts+)1+KK1(+)PP0T1ss(Ts+)1T1sK0-f=s(Ts+)1=-K0en1K11+K1(+)0s(Ts+)1+KK1(+)PP0T1ss(Ts+)1T1sE(s)=f(s)R(s)+fN(s)eens(Ts+)11e=limsf(s)R(s)=lims=0sse2s®0s®01ss(Ts+)1+KK1(+)P0Ts1-K01-T1(2)e=limsfN(s)=lims=ssen2s®0s®01sKs(Ts+)1+KK1(+)PP0Ts1-K1(3)e=limsfN(s)+limsf(s)R(s)=lims0+ssene2s®0s®0s®01ss(Ts+)1+KK1(+)P0Ts1sTs(+1)1-T1lims=2s®01sKsTs(+1)+KK(1+)PP0Ts1(4)当K,T发生变化时,对上述结果无任何影响。因为K,T处于外扰n(t)作用点的后面对00e(¥)无影响。而系统为二阶无差度系统,r(t)=t时e(¥)=0故K,T等数变化,只要不ssss0改变系统的结构,即e(¥)=0,当K,T发生变化时,对e(¥)有影响。ssPIss14
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答第第第4章习题解答4.1图题4.1所示控制系统,根据频率特性物理意义,求下列输入信号作用时系统的稳态输出c和稳态误差e;ssss(1)r(t)=sin2t;00(2)r(t)=sin(t+30)-2cos(2t-45)。R(s)E(s)C(s)1Äs+1-图题4.11o101解:(1)css=sin(2t-45)ess=sin(2t+arctg)2243(2)c1toarctg12t;25sin(263)4.ss=sin(-30-)+sin2ess=sin(t+48)4.+t+522584.2最小相位系统的开环对数幅频渐近线如图题4.2所示,确定系统的开环传递函数。L(w)0dB/dec400dB/dec-20dB/dec3020dB/dec20-40dB/dec501.0w1w2w3w4w-60dB/dec图题4.2解:因为最小相位系统,即系统的闭环极点都在s左边平面转换频率:1.0、w、w、w、100123w=1.0处,斜率为20dB/dec,属于微分环节w=w处,斜率为-20dB/dec,属于惯性环节,1w=w处,斜率为-20dB/dec,属于惯性环节,2w=w处,斜率为-20dB/dec,属于惯性环节,3w=100处,斜率为-20dB/dec,属于惯性环节,因此系统的传递函数为:sK(+)11.0G(s)=ssss(+1)(+1)(+1)(+)1www1001235.120lgK=30,K=10=31.62,15
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答根据dB/dec的几何意义有:40-3020=,w1=.0316lgw-lg1.015-20-40=,w3=42.17lg100-lgw320-40-20=,w2=.4217lgw-lgw32s31.62(+)11.0G(s)=ssss(+1)(+1)(+1)(+)10.3164.21742.171004.3最小相位系统的开环对数幅频特性的渐近线如图题4.3所示,试写出系统的开环传递函数。L(w)db80-20db/dec-40db/dec-20db/dec5w0.0010.010.1-40db/dec图题4.3(1)A=80dB(2)w=1c解:1K(s+)11.0G(s)=11s(s+1)(s+)1.0015在穿越频率w=1附近,作如下近似:c12K1(+w)0.110KK»==11212100w10w1+w1+w0.015得K=10,故10(10s+1)Gs()=s(100s+1)(0.2s+1)16
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答4.4最小相位系统的开环对数幅频特性渐进线如图题4.4所示,确定系统的开环传递函数。L(w)db-40dbdec/-60db/decw810161-40db/dec-60/dbdec图题4.4解:由系统开环对数幅频特性图可知:1K(s+)18G(s)=21s(s+1)(s+)116K=10,K=100aa200(s+)8G(s)=2s(s+1)(s+16)4.5最小相位系统的开环对数幅频特性的渐近线如图题4.5所示,确定系统的开环传递函数。L(w)-20db/dec-40db/decw2.05.0图题4.5K解:G(s)=1s(s+)12由图可知,系统的截止频率为:w=5rad/scKw=5=1,得K=125.wccwc225G(s)=s(s+)217
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答4.6已知单位反馈系统的开环传递函数为10G(s)=(s+1)(1.0s+)1用奈氏判据判断闭环系统的稳定性。解:由于开环传递函数在S平面原点处没有极点,且为单位反馈系统故H(s)=1,系统频率10特性为:G(jw)H(jw)=(jw+1)(1.0jw+)1limG(jw)H(jw)=10limÐG(jw)H(jw)=0w®0+,w®0+limG(jw)H(jw)=0limÐG(jw)H(jw)=-pw®+¥,w®+¥画出奈氏图可知N=N=0,N=0,又P=0,故Z=0,所以系统稳定。+-4.7已知单位反馈系统开环传递函数KG(s)=1(+1.0s)(1+5.0s)(1+s)用奈氏判据确定K为何值时,使得闭环系统稳定。解:由于开环传递函数在S平面原点处没有极点,且为单位反馈系统故H(s)=1,系统频率特性为:KH(jw)G(jw)=1(+1.0jw)(1+5.0jw)(1+jw)limG(jw)H(jw)=KlimÐG(jw)H(jw)=0w®0+,w®0+3limG(jw)H(jw)=0limÐG(jw)H(jw)=-pw®+¥,w®+¥2系统稳定性与路径跟实轴负半轴的交点位置有关,将频率特性化为代数形式:KH(jw)G(jw)=1(+1.0jw)(1+5.0jw)(1+jw)23K1(-.065w)K.0(05w-6.1w)=+j2222221(+.001w)(1+.025w)(1+w)1(+.001w)(1+.025w)(1+w)-198.K即由ImH(jw)G(jw)=V(w)=0得w=±42,代入实部得U(±4)2==-.005K1.32´9´33画出奈氏图可知,当U(±4)2=-.005K>-1时,奈氏曲线不包围(-1,j0)点,即K=20时,为临界稳定,K满足020时,不稳定。画图略。4.8已知单位负反馈系统的开环传递函数为KG(s)=s-1用奈氏判据判断系统的稳定性。解:由于开环传递函数在S平面原点处没有极点,S平面右半平面有一个极点,故P=1。且是单位反馈系统故H(s)=1,系统频率特性为:K-K-jwKH(jw)G(jw)==+22(jw-)11+w1+wlimG(jw)H(jw)=KlimÐG(jw)H(jw)=-pw®0+,w®0+limG(jw)H(jw)=0ÐG(jw)H(jw)=-1plimw®+¥,w®+¥218
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答由奈氏图可知,系统稳定性取决于轨迹与实轴交点位置。令虚部为零得w=0,实轴交点为U)0(=-K,当K>1时,U)0(位于(-,1j)0的左边,即N=0,N=1,+-N=N-N=0-1=-1,此时,Z=N+P=-1+1=0,满足系统稳定要求。+-所以,当K>1时,系统稳定;K=1时,系统临街稳定;K<1时,N=0,P=1,Z=N+P=1,系统不稳定。4.9设单位反馈控制系统开环传递函数为as+1G(s)=2s0试确定使相位裕量g=45的a值。ajw+1-1-a解:G(jw)H(jw)==+j22(jw)ww221+awc422G(jw)H(jw)==1,即wc-awc-1=0cc2wcooo4又g=180+arctan(aw)-180=45,即得aw=1,代入得w=2,所以ccc1a==0.84。4219
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答第第第5章章章习题解答章习题解答5.1单位反馈伺服系统的开环传递函数为:Gs()=20s(0.1s+1)试按最佳二阶模型整定PID参数。k1解:被控对象为含有积分环节Gs()=,已知T=0.1,k=200,取期望模型为:011sTs(1+1)11Gs()=,则校正装置的传递函数为:Gsc()=2TsTs1(1+1)2kT111可见,应采用P调节器,其参数整定为k=p405.2设开环传递函数为:kGs()=(s+10.01)(s+1)试按最佳二阶模型整定PID参数。kk12解:被控对象为两个惯性环节串联Gs()=0(Ts1+1)(Ts2+1)1已知T=0.01,T=1,kk=k,取期望模型为Gs()=12122TsTs1(1+1)Gs()T1Gs()==21+cGs0()2kkT121Ts2可见应采用PI调节器,参数整定为:T12k==,T=1pI2kkT0.02k1215.3设单位反馈系统开环传递函数为:8Gs()=s(2s+1)试按具有最佳频比的典型三阶模型整定PID参数。k2解:被控对象为Gs()=,已知k=8,T=2,h=5022sTs(2+1)Gs()h+11Gsc()==1+,可见应采取PI调节器,其参数整定为:Gs0()2khT22hTs2h+1k==0.0375,T=10pI2hkT2220
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答405.4设单位反馈系统开环传递函数为:Gs()=,试按具有最佳频比的0s(0.2s+10.0625)(s+1)典型三阶模型整定PID参数。k2解:被控对象为:Gs()=0sTs(2+1)(Ts3+1)已知T=0.0625,T=0.2,k=40,h=5,232Gs()(h+1)(hT2+T3)1hTT23Gsc()==221++sGs0()2hTk22(hT2+Ts3)hT2+T3可见应采用PID调节器,其参数整定为:(h+1)(hT2+T3)k=0.4p222hTk22TI=(hT2+T3)0.5hTT23T=0.12DhT+T23105.5设未校正系统的开环传递函数为:Gs()=,试按具有最佳频比的典型0s(0.2s+10.5)(s+1)三阶模型整定PID参数。Gs()(h+1)(hT2+T3)1hTT23Gsc()==221++sGs0()2hTk22(hT2+Ts3)hT2+T3可见应采用PID调节器,其参数整定为:(h+1)(hT2+T3)k=0.45p222hTk22TI=(hT2+T3)1.5hTT23T=0.33DhT+T2321
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答第第第6章习题解答*6.1已知理想采样开关的采样周期为T秒,连续信号为下列函数,求采样的输出信号f(t)及*其拉氏变换F(s)。-at(1)f(t)=te-at(2)f(t)=esinwt¥¥*-kaT*-akT-kTs解:(1)f(t)=∑kTed(t-kT),F(s)=∑kTeek=0k=0¥¥*-akT*-akT-kTs(2)f(t)=∑esin(wkT)d(t-kT),F(s)=∑esin(wkT)ek=0k=06.2求下列序列的Z变换。设k<0时f(k)=0。23(1),1l,l,l,L234(2)l,l,l,l,L-12-23-3-1-12-13解:(1)F(z)=1+lz+lz+lz+L=1+lz+(lz)+(lz)+L1z==-11-lzz-l¥-n(2)z(e(t))=∑e(nT)zn=0F(z)=l+l2z-1+l3z-2+l4z-3+L-12-23-3llz=l1(+lz+lz+lz+L)==-11-lzz-l6.3设采样周期为0.5s,求函数f(t)的Z变换F(z)10£t<2.2f(t)=0t<,0t³2.2-1-2-3-4解:Fz()=1+z+z+z+z6.4用长除法、部分分式法和留数法求F(z)的反变换。10z(1)F(z)=(z-1)(z-)2-1-aTz1(-e)(2)F(z)=-1-1-aT1(-z)(1-ze)2z(3)F(z)=(z-8.0)(z-)1.0-10z10zk解(1)F(z)=+,则:f(kT)=102(-)1z-1z-2-1-aT-aTz1(-e)z1(-e)zz(2)F(z)===--1-1-aT-aT-aT1(-z)(1-ze)(z-1)(z-e)z-1z-e22
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答¥-anT*-anTf(nT)=1-e,则:f(t)=∑1(-e)d(t-nT)n=018zz1k+1k+1(3)F(z)=(-),则:f(kT)=8.0(-1.0)7z-0.8z-0.10.76.5如图6.5所示采样控制系统:r(t)T1-e-TsKc(t)ss+1图题6.5(1)求系统开环脉冲传递函数;(2)求系统闭环脉冲传递函数;(3)写出系统的差分方程。-Ts1-eK解:(1)Gs()=ss+1-11-111Gz()=K(1-z)[Z]=K(1-z)[Z-]ss(+1)ss+1-T-1-111K(1-e)z=K(1-z)[-]=-1-T-1-T-11-z1-ez1-ez-T-1Cz()Gz()K(1-e)z(2)F()z===-T-T-1Rz()1+Gz()1(+K-e-Ke)z-T-T-T(3)ck()(+K-e-Ke)(ck-1)=K(1-e)(rk-1)4326.6已知闭环离散系统的特征方程为D(z)=z+2.0z+z+.036z+8.0=0判断系统的稳定性。解:朱利判据,D(1)>0,D(-1)>0(n为偶数),a=0.8b=2.003c=.00896>c=.0089602系统稳定。6.7如图题6.7所示离散系统,采样周期T=1s,Gh(s)为零阶保持器,而KG(s)=s2.0(s+)1要求:(1)K=5时,分析系统的稳定性;23
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答(2)确定使系统稳定的K值范围。R(t)e(t)C(t)Ä_Gh(s)G(s)T图题6.7-TsK(1-e)(1)GsGs()()=h2s(0.2s+1)闭环传递函数-5-5GGz()K[(0.80.2+e)z-1.2e+0.2]hF()z==-5-5-5GGz()1+(z-1)(ze-)+K[(0.80.2+e)z-1.2e+0.2]h-5-5-5Dz()=(z-1)(ze-)+K[(0.80.2+e)z-1.2e+0.2]2-5-5-5-5=z+[(0.80.2K+e)1--e]ze++K(0.21.2-e)2-5当K=5时,Dz()=z+3z+-15e,由于D(1)>0,D(-1)<0,而n为偶数,系统不稳定。-5(2)要使系统稳定则D(1)=K(1-e)>0所以K>0;-5-5D(1)-=+22e-K(0.61.4+e)>0所以K<3.3-5-5-5|a||1速度误差系数:K=lim(z-)1G(z)=¥rz->12加速度误差系数为:K=lim(z-)1G(z)=4.0az->1所以系统的稳态误差为21TTe(¥)=e=++=1.0ssKKKpra24
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答6.9如图题6.9所示离散系统,其中T=0.1(s),K=1,r(t)=t,试求静态误差系数Kp,Kv,Ka,并求系统稳态误差e(¥)。r(t)e(t)e(*t)-Ts-TsKc(t)1-1-ee-Tsss(s+)1图题6.9-Ts1-eK解:Gs()=sss(+1).0005(z+)9.0系统的开环传递函数为:G(z)=(z-1)(z-.0905)位置误差系数:K=lim1[+G(z)]=¥pz->1速度误差系数:K=lim(z-)1G(z)=1.0vz->12加速度误差系数为:K=lim(z-)1G(z)=0az->1T所以系统的稳态误差为:e(¥)=e==1ssKV25
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答第7章习题解答7.1非线性系统线性部分的极坐标图、非线性部分的负倒幅特性如图题8.1所示。试判断系统是否稳定,是否存在自振荡。ImIv=¥mv=¥¥¬X/aa0Rea0Re·G(jv)·1N0(X/a)v=Ⅱ¥v=IⅡ-1G(jv)N0(X/a)X/a()a()bIImmv=¥¥¬X/av=¥0R-1ab0ReeN0(X/a)v=I¥v=IG(jv)G(jv)-1X/aN0(X/a)()c()d图题7.1解:(a)存在稳定的自激振荡(b)存在稳定的自激振荡(c)a点是稳定的自振点,b是不稳定的自振点。(d)不稳定7.2如图题7.2所示非线性系统,分析系统稳定性和自激振荡的稳定性,并确定稳定自激振荡的振幅和频率。M402-Mss(+1)图题7.22解:该系统的频率特性:Gj(w)=4=-8w+4w-4j222jww(j+1)w(1+w)w(1+w)plim|(Gjw)|=¥,limÐGj(w)=-w®0w®0+23plim|(Gjw)|0,lim=ÐGj(w)=-w®+¥w®+¥228M4w-4-8w令=0,则w=1,所以=-2根据理想继电器的负倒特性,A=,系22w(1+w)w(1+w)p统是不稳定的,交点处的自激震荡是稳定的自激震荡。26
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答7.3如图题7.3所示双位继电器非线性系统,其中,a=1,M=3。分析自激振荡的稳定性,并确定稳定自激振荡的振幅和频率。M-a40ass(+1)(s+2)-M图题7.3241242(-w)解:Gjw()==--j2222jwjw(+1)(jw+2)(w+1)(w+4)ww(+1)(w+4)P-1ÐGjw()=--2tgw2PlimGjw()=¥limÐGjw()=-w®0w®023PlimGjw()=0limÐGjw()=-w®+¥w®+¥22令ImGjw()=0得w=2,则ReGjw()=-(与实轴交点),画出乃氏图31PA由图可知系统的负倒特性为-=-NA()1121-2APa2算出-=-,画出负倒特性曲线,可知与乃氏曲线有交点,所以存在自激振荡,自激振荡2b3频率w=2。PA22求幅值:-=-,得A=5.26或1.2413121-2AA=1.11或2.29,A=1.11为不稳定自激振荡幅值,所以舍去,取A=2.29。7.4如图题7.4所示非线性系统,试用描述函数法分析系统自激振荡的稳定性,并确定自激振荡的振幅和频率。10s(s+)1图题7.410-10-10解:G(jw)=,Re=,Im=22jw(jw+1)w+1(w+)1w27
王万良,赵燕伟编著《自动控制原理》(非自动化类)(机械工业出版社)习题解答1p22pa-=-A-a-jN(A)4b4b由-10p22=-A-a2w+14b-10pa=-2(w+)1w4b解得:w=.497,A=5.0327.5如图题7.5所示非线性系统,已知非线性环节的描述函数为N(A)=A,分析系统自激4振荡的稳定性;若自激振荡稳定,确定自激振荡的振幅和频率。1s(s+1)(s+2)图题7.53214解:N(A)=A,-=-24N(A)3A1Gjw()=jwjw(+1)(jw+2)p3plimGj(w)=¥,limÐGj(w)=-,limGj(w)=0,limÐGj(w)=-w®0+w®0+2w®¥w®0+2奈氏曲线与负导特性曲线如下:由图可知,当A增大时,负倒特性移动方向由稳定区进入不稳定区,故自激振荡不稳定。28'
您可能关注的文档
- 物理化学课后习题解答.doc
- 物理学习题解答-第三版-祝之光.doc
- 物理学习题解答-第三版-祝之光.pdf
- 物理学习题解答-第三版-祝之光111.doc
- 三版_刘克哲_课后答案(1~16章).pdf
- 物理学简明教程马文蔚第1至7章课后习题答案详解.doc
- 物理必修1练习题含答案.doc
- 玄武区历史双向细目表(八上09、7).doc
- 王万生《计算机组成原理实用教程》课后习题答案.pdf
- 王万良《自动控制原理》高教版习题解答.pdf
- 王兆安《电力电子技术》第五版习题答案.pdf
- 王兆安《电力电子技术》第四版 课后习题答案.pdf
- 王兆安《电力电子技术》第四版_课后习题答案.pdf
- 王全瑞主编《有机化学》习题及思考题答案.doc
- 王勖成《有限单元法》第8章习题答案.pdf
- 王化成《财务管理》第四版课后习题及答案-PDF格式.pdf
- 王化成主编《财务管理》第四版课后习题及答案.doc
- 王宏建《艺术概论》课后题答案整理.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明