

- 1.35 MB
- 2022-04-22 11:17:02 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
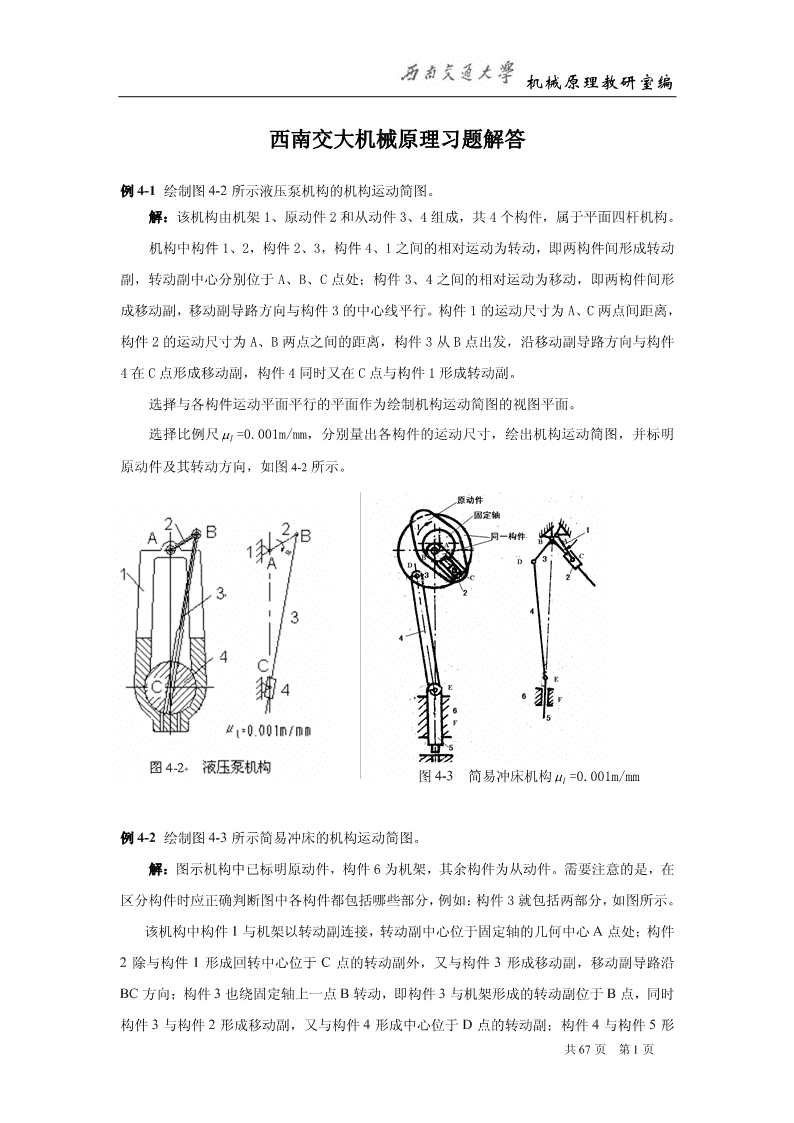
'机械原理教研室编西南交大机械原理习题解答例4-1绘制图4-2所示液压泵机构的机构运动简图。解:该机构由机架1、原动件2和从动件3、4组成,共4个构件,属于平面四杆机构。机构中构件1、2,构件2、3,构件4、1之间的相对运动为转动,即两构件间形成转动副,转动副中心分别位于A、B、C点处;构件3、4之间的相对运动为移动,即两构件间形成移动副,移动副导路方向与构件3的中心线平行。构件1的运动尺寸为A、C两点间距离,构件2的运动尺寸为A、B两点之间的距离,构件3从B点出发,沿移动副导路方向与构件4在C点形成移动副,构件4同时又在C点与构件1形成转动副。选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。选择比例尺μl=0.001m/mm,分别量出各构件的运动尺寸,绘出机构运动简图,并标明原动件及其转动方向,如图4-2所示。图4-3简易冲床机构μl=0.001m/mm例4-2绘制图4-3所示简易冲床的机构运动简图。解:图示机构中已标明原动件,构件6为机架,其余构件为从动件。需要注意的是,在区分构件时应正确判断图中各构件都包括哪些部分,例如:构件3就包括两部分,如图所示。该机构中构件1与机架以转动副连接,转动副中心位于固定轴的几何中心A点处;构件2除与构件1形成回转中心位于C点的转动副外,又与构件3形成移动副,移动副导路沿BC方向;构件3也绕固定轴上一点B转动,即构件3与机架形成的转动副位于B点,同时构件3与构件2形成移动副,又与构件4形成中心位于D点的转动副;构件4与构件5形共67页第1页
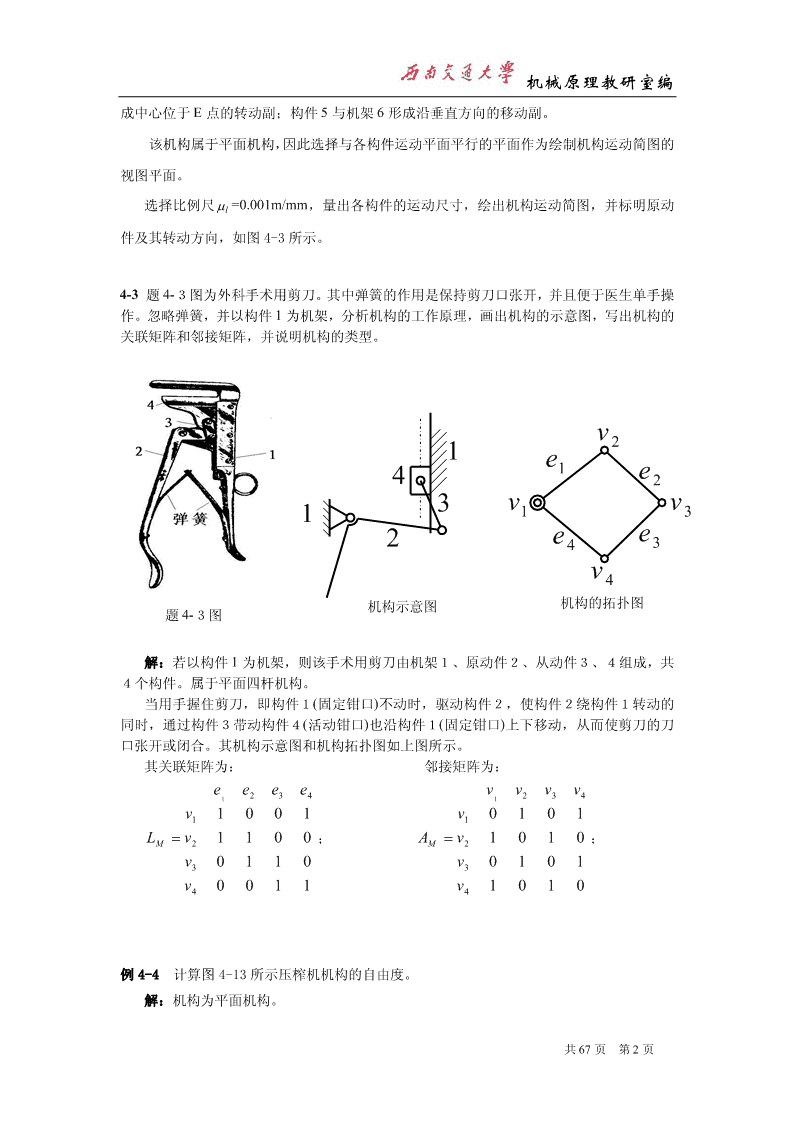
机械原理教研室编成中心位于E点的转动副;构件5与机架6形成沿垂直方向的移动副。该机构属于平面机构,因此选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。选择比例尺μl=0.001m/mm,量出各构件的运动尺寸,绘出机构运动简图,并标明原动件及其转动方向,如图4-3所示。4-3题4-3图为外科手术用剪刀。其中弹簧的作用是保持剪刀口张开,并且便于医生单手操作。忽略弹簧,并以构件1为机架,分析机构的工作原理,画出机构的示意图,写出机构的关联矩阵和邻接矩阵,并说明机构的类型。v21e41e23vv1132e4e3v4机构示意图机构的拓扑图题4-3图解:若以构件1为机架,则该手术用剪刀由机架1、原动件2、从动件3、4组成,共4个构件。属于平面四杆机构。当用手握住剪刀,即构件1(固定钳口)不动时,驱动构件2,使构件2绕构件1转动的同时,通过构件3带动构件4(活动钳口)也沿构件1(固定钳口)上下移动,从而使剪刀的刀口张开或闭合。其机构示意图和机构拓扑图如上图所示。其关联矩阵为:邻接矩阵为:eeeevvvv12341234v1001v010111L=v1100;A=v1010;M2M2v0110v010133v0011v101044例4-4计算图4-13所示压榨机机构的自由度。解:机构为平面机构。共67页第2页
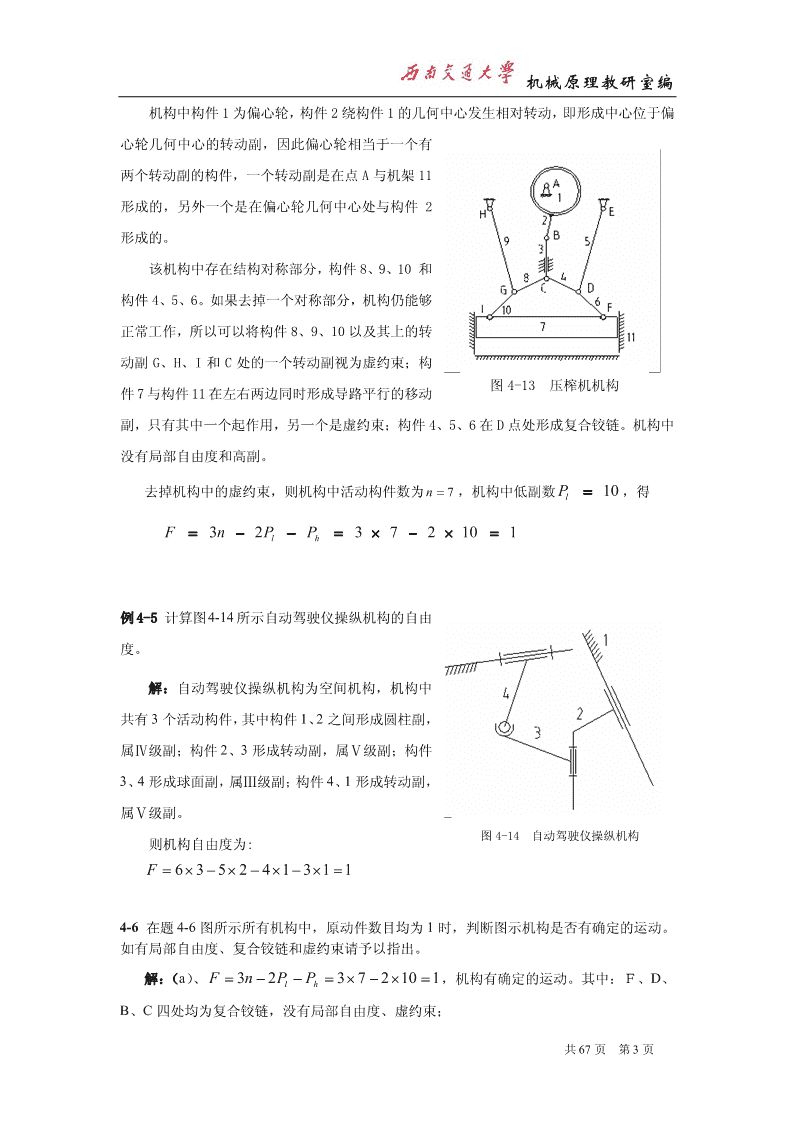
机械原理教研室编机构中构件1为偏心轮,构件2绕构件1的几何中心发生相对转动,即形成中心位于偏心轮几何中心的转动副,因此偏心轮相当于一个有两个转动副的构件,一个转动副是在点A与机架11形成的,另外一个是在偏心轮几何中心处与构件2形成的。该机构中存在结构对称部分,构件8、9、10和构件4、5、6。如果去掉一个对称部分,机构仍能够正常工作,所以可以将构件8、9、10以及其上的转动副G、H、I和C处的一个转动副视为虚约束;构图4-13压榨机机构件7与构件11在左右两边同时形成导路平行的移动副,只有其中一个起作用,另一个是虚约束;构件4、5、6在D点处形成复合铰链。机构中没有局部自由度和高副。去掉机构中的虚约束,则机构中活动构件数为n=7,机构中低副数P=10,得lF=3n−2P−P=3×7−2×10=1lh例4-5计算图4-14所示自动驾驶仪操纵机构的自由度。解:自动驾驶仪操纵机构为空间机构,机构中共有3个活动构件,其中构件1、2之间形成圆柱副,属Ⅳ级副;构件2、3形成转动副,属Ⅴ级副;构件3、4形成球面副,属Ⅲ级副;构件4、1形成转动副,属Ⅴ级副。图4-14自动驾驶仪操纵机构则机构自由度为:F=6×3−5×2−4×1−3×1=14-6在题4-6图所示所有机构中,原动件数目均为1时,判断图示机构是否有确定的运动。如有局部自由度、复合铰链和虚约束请予以指出。解:(a)、F=3n−2P−P=3×7−2×10=1,机构有确定的运动。其中:F、D、lhB、C四处均为复合铰链,没有局部自由度、虚约束;共67页第3页
机械原理教研室编(b)、F=3n−2P−P=3×9−2×12−1=2,机构没有确定的运动。其中:A处lh为复合铰链,K处为局部自由度,没有虚约束;(C)、F=3n−2P−P=3×7−2×10=1,机构有确定的运动。其中:构件AB、lhBC、CD、AD四杆中有一杆为虚约束,如果将构件AD视为虚约束,去掉虚约束,则点B、C均为复合铰链,没有局部自由度;(d)、F=3n−2P−P=3×3−2×4−1=0,系统不能运动,lh所以也就不是一个机构。从图中可以看出,铰链点C是构件BC上的点,其轨迹应当是以铰链点B为圆心的圆,同时,铰链点C又是构件CD上的点,轨迹应当是移动副F约束所允许的直线,两者是矛盾的,所以,系统不能运动。系统中没有局部自由度、复合铰链、虚约束。(e)、F=3n−2P−P=3×5−2×6=3,机构没有确定的运动。没有局部自由度、lh复合铰链、虚约束。(a)(b)(c)(d)(e)题4-6图4-7计算题4-7图所示齿轮-连杆机构的自由度。共67页第4页题4-7图
机械原理教研室编解:(a)、F=3n−2P−P=3×4−2×5−1=1,铰链点A为复合铰链,齿轮副为高lh副。(b)、F=3n−2P−P=3×6−2×7−3=1,铰链点B、C、D均为复合铰链。lh4-8题4-8图所示为缝纫机中的送料机构。计算该机构的自由度,该机构在什么条件下具有确定的运动?解:F=3n−2P−Plh=3×4−2×4−2=2C处的滚子为局部自由度,构题4-8图件1于构件2、构件3与构件2之间形成两对高副,但是,每对高副的法线都是重合的,所以,每对高副中有一个高副为虚约束。由于该机构具有2个自由度,所以该机构在有2个原动件的条件下就具有确定的运动。4-9计算题4-9图所示机构的自由度。(a)(b)题4-9图解:(a)、F=3n−2P−P=3×6−2×6−4=2lh(b)、F=3n−2P−P=3×7−2×9−1=2(注:滑块D受到的运动约束与构件lhFGC上C的运动轨迹相重合,所以滑块D及其上的转动副和移动副均应视为虚约束。)共67页第5页
机械原理教研室编4-10构思出自由度分别为1、2和3的Ⅲ级机构的设计方案。(a)(b)(c)解:由机构的组成原理可知,一个Ⅲ机构中,至少应当包含有一个Ⅲ级基本杆组。将一个Ⅲ级基本杆组中的一个外副与一个单自由度的机构相联,另外两个外副与机架相联,则可以得到一个单自由度的Ⅲ机构;如果将Ⅲ级基本杆组中的两个外副分别与两个单自由度的机构相联,另外一个外副与机架相联,则可以得到一个有两个自由度的Ⅲ机构。而最简单的单自由度机构是一个构件与机架通过一个低副(如:转动副)联接所形成的机构。按照以上分析,自由度分别为1、2和3的Ⅲ级机构最简单的结构分别如图中(a)、(b)和(c)所示。4-12确定图4-19a所示机构当构件8为原动件时机构的级别。解:确定机构的级别关键是要拆出机构中所含的基本杆组。当构件8为原动件时,拆基本杆组首先应当从最远离原动件的构件1拆起,可以拆出Ⅱ级基本杆组ABC,然后,又依次可以拆出Ⅱ级基本杆组DEF和GHI。如下图示。所以该机构为Ⅱ级机构。FCEBDJAGHI图4-19例5-1在图5-3所示的铰链四杆机构中,已知该机构的结构参数以及构件1的转速为ω,机构运动简1图的比例尺为μ。利用速度瞬心法,求在图示位置l时,构件2和构件3的转速ω和ω的大小和方向。23解:首先找出相关的速度瞬心:速度瞬心P10、P12、P23、P03可根据相应的构件构成转动副直接确定出来;而P02和P13需应用三心定理来确定:速度共67页第6页图5-3
机械原理教研室编瞬心P02应在三个构件0、1、2的两个已知速度瞬心P10和P12的连线上,同时又应在三个构件0、3、2的两个已知速度瞬心P03、P23的连线上,则这两条连线的交点即为P02。速度瞬心P13的确定方法类似,它应是P12P23连线和P10P03连线的交点。由速度瞬心的概念,在速度瞬心点两构件的绝对速度相同,便可求解未知转速。在速度瞬心点P12有V=ω⋅PPμ=ω⋅PPμP1211012l21202l式中PP和PP可直接从所作的图中量取。由上式可解出10121202PP1012ω=ω21PP1202→由绝对速度vP12方向,得出ω2方向为顺时针方向。同理,在速度瞬心点P13有V=ω⋅PPμ=ω⋅PPμP1311013l30313l→由绝对速度v的方向,可知其为逆时针方向。P13例5-2在图5-4所示的凸轮机构,已知该机构的结构尺寸和凸轮1的角速度ω。利用瞬心1ρ法,求机构在图示位置时从动件2的线速度v。机构运动简图的比例尺为μ。2l解:构件1与机架0的速度瞬心P01以及从动件与机架的速度瞬心P02可根据相应的构件分别构成转动副和移动副而直接确定出来。凸轮1和从动件之间的瞬心P12的确定方法是:一方面,P12应在构件1、2高副接触点K的公法线n-n上,另一方面,利用三心定理,它又应在瞬心P01和P02的连线上,即又应在过点P01而垂直于从动件2与机架移动副导路的直线上。因而,n-n与该直线的交点即为P12。再根据速度瞬心的概念,可得:ω⋅PPμ=v=v10112lP122其中,P01P12可以直接从图中量出。从动件的速度v2方向图5-4如图中v所示。P12共67页第7页
机械原理教研室编5-2在题5-2图所示所示的平面组合机构中,已知机构作图的比例尺μl,及构件1的角速度ρω,求图示位置构件4的线速度v。14PP0204P24nP23ωP34P12nP04P14P01ρv题5-2图P14解:根据两个构件相成运动副的瞬心的确定方法可以确定出瞬心P,P,P,P,01022334P的位置或所在的直线。由于题目已知构件1的角速度,求构件4的线速度,因而需求出04速度瞬心P。一方面,P应在瞬心P和P的连线上,另一方面,它也应在瞬心P和P141401041224的连线上。而瞬心P一方面应在构件1、2高副接触点的公法线n-n上,另一方面,它也12应在瞬心P和P的连线上;瞬心P一方面应在瞬心P和P的连线上,另一方面,它0102242334也应在瞬心P和P的连线上。0204根据速度瞬心的概念,可得ω⋅PPμ=v=v,其中,PP可以直接从图中10114lP1440114量出。构件4的速度方向如图中v所示。P145-3确定题5-3图所示机构所有的速度瞬心。如果已知构件1的角速度ω,设图示比例为μ,1l(a)共67页第8页(b)题5-3图
机械原理教研室编P56P25P15P122P26o2P3ω23v4PωP344245o33P135o1P45P36P13oP34ω1PPP6141646v(a)P13求图示位置时,题5-3图(a)齿轮4的角速度ω4的大小、方向和题5-3图(b)构件3的速度V的大小和方向。32N(N−1)解:(a)、图示机构共有6个构件,所以速度瞬心的数目为C==15。其N2中:P、P和P在转动副O处;P、P和P在转动副O处;P在转动副O处;14164611215252353P在转动副O处;P在表示齿轮2和齿轮3的圆的切点处;P在表示齿轮2和齿轮4的362324圆的切点处;P在瞬心P和P的连线与瞬心P和P的连线的交点处;P在瞬心P和13122316362624P的连线与瞬心P和P的连线的交点处;P在瞬心P和P的连线与瞬心P和P的4623363423243646连线的交点处;P在瞬心P和P的连线与瞬心P和P的连线的交点处;P在瞬心P56353615164524和P的连线与瞬心P和P的连线的交点处。253435共67页第9页
机械原理教研室编根据速度瞬心的概念,可得ω⋅PPμ=ω⋅PPμ=v,从而可先求出构件311613l33613lP13PP1613的角速度ω=ω⋅,其中,PP和PP可以直接从图中量出,构件3的速度方3116133613PP3613向如图中ω所示;再根据速度瞬心的概念,可得ω⋅PPμ=ω⋅PPμ=v,从343446l33436lP34PP3436而可求出构件4的角速度ω=ω⋅,其中,PP和PP可以直接从图中量出,4334363446PP3446构件4的速度方向如图中ω所示。4423n1n′v3ωPP1334P14P12P23P24nn′(b)2N(N−1)(b)、图示机构共有4个构件,所以速度瞬心的数目为C==6。其中:P和N142P分别在构件1和构件4、构件2和构件4形成的转动副处;P在垂直于移动副导路的2434无穷远处;P在过高副接触点B的公法线n-n和瞬心P、P的连线的交点处;P在过12142423高副接触点C的公法线n′−n′和瞬心P、P的连线的交点处;P在瞬心P和P的连2434131223线与瞬心P和P的连线的交点处。1434根据速度瞬心的概念,可得ω⋅PPμ=v=v,其中,PP可以直接从图中11314lP1331314量出。构件3的速度方向如图中v所示。3共67页第10页
机械原理教研室编6-3在题6-3图的四杆闭运动链中,已知a=150mm,b=500mm,c=300mm,d=400mm。欲设计一个铰链四杆机构,机构的输入运动为单向连续转动,确定在下列情况下,应取哪一个构件为机架?①输出运动为往复摆动;②输出运动也为单向连续转动。解:①当输出运动为往复摆动时,机构应为曲柄摇杆机构,此时应取四杆中最短杆的相邻杆,即b或d作为机架。②当输出运动也为单向连续转动时,机构应为双曲柄机构,此时应取四杆中的最短杆,即a作为机架。题6-3图6-5在题6-5图a、b中(a)(b)题6-5图(1)说明如何从一个曲柄摇杆机构演化为题6-5图a的曲柄滑块机构、再演化为题6-5图b的摆动导杆机构;(2)确定构件AB为曲柄的条件;(3)当题6-5图a为偏置曲柄滑块机构,而题6-5图b为摆动导杆机构时,画出构件3的极限位置,并标出极位夹角θ。解:(1)当曲柄摇杆机构的摇杆为无穷长时,则原来摇杆与机架之间的转动副就变为移动副,原机构就演化为了题6-5图a的曲柄滑块机构。如果取曲柄滑块机构中的连杆作为机架,则曲柄滑块机构就演化为了题6-5图b的摆动导杆机构。(2)对于图(a),构件AB为曲柄的条件是a+e≤b;对于图(b),只要导杆BC足够长,满足装配要求,则构件AB始终为曲柄。共67页第11页
机械原理教研室编(3)对于题6-5图(a),构件3的极限位置在曲柄1和连杆2的两次共线处,其极限Bω2CCC1323213A1θB2B1(a)位置3、3和极位夹角θ如图(a)所示;对于题6-5图(b),构件3的极限位置在曲柄112与滑块2形成的转动副B的轨迹圆与导杆3的切线处,即∠ABC=90ο,其极限位置3、13和极位夹角θ如图(b)所示。23B2131Aθω32BB12211142122C(b)6-6题6-6图为开槽机上用的急回机构。原动件BC匀速转动,已知a=80mm,b=200mm,l=100mm,ADl=400mm。DF(1)确定滑块F的上、下极限位置;共67页第12页题6-6图
机械原理教研室编(2)确定机构的极位夹角;(3)欲使极位夹角增大,杆长BC应当如何调整?解:(1)由于a=80mmz时,x的物理含义。minmin证明:当被加工的齿轮的齿数zz时,x的物理意义是指加工刀具可以向齿坯转动中心移动、而齿轮不minmin发生根切现象的最大变位系数。8-7用一个标准齿条形刀具加工齿轮。齿条的模数m=4mm,齿形角α=200,齿顶高系数h*=1,顶隙系数c*=0.25,齿轮的转动中心到刀具分度线之间的距离为aH=29mm,并且被加工齿轮没有发生根切现象。试确定被加工齿轮的基本参数。mz解:由于H一般与被加工齿轮的分度圆半径的大小相近,所以有H≈,由此可22H2×29得z===14.5m4由于齿数数已经小于标准齿轮不根切的最小齿数17,所以只可能是正变位齿轮。如果15×4将齿轮的齿数圆整为z=15,则H<=30mm,为负变位齿轮,则齿轮一2共67页第38页
机械原理教研室编定会发生根切现象。将齿数圆整至整数z=14,则由mzH=+xm2mz4×14H−29−22可得x===0.25m4此时齿轮不根切的最小变位系数为*h(z−z)1×(17−14)aminx===0.176minz17min故变位系数x=0.25>0.176满足齿轮不根切条件。所以被加工齿轮为正变位齿轮,齿数为14,变位系数为0.25。mz4×14分度圆半径为r===28mm22基圆半径为r=rcosα=28cos20°=26.31mmb*齿顶圆半径为r=r+(h+x)m=28+(1+0.25)×4=33mmaa*齿根圆半径为r=r−(h+c*−x)m=28−(1+0.25−0.25)×4=24mmfa例8-1在下列情况下确定外啮合直齿圆柱齿轮传动的类型:(1)z=14,z=40,α=15ο,h*=1,c*=0.25。12a*2ha解:由式z=可得z=30,由于z+z<2z,这对齿轮传动min2min12minsinα只能采用正传动。变位系数的选择应满足x≥x,x≥x。11min22min(2)z=33,z=47,m=6mm,α=20ο,h*=1,.a"=235mm12am(z+z)解:因为a=12=240mm>a"=235mm2所以,必须采用负传动。齿轮的变位系数由无齿侧间隙方程确定:acosαα"=arccos()=16.32οa"z+zx+x=12(inv16.32ο−inv20ο)=−0.763122tanα共67页第39页
机械原理教研室编至于x和x各取什么值,还应根据其他条件确定。12(3)z=12,z=28,m=5mm,α=20ο,h*=1,要求无根切现象。12a解:由已确定的参数可知,不根切的最少齿数为17,根据各种传动类型的齿数条件可知:可以采用的齿轮传动类型是等变位齿轮传动、正传动和负传动。5(4)a"=138mm,m=4mm,α=20ο,h*=1,i=.传动比误差不超过a123±1%2a"解:z==25.8751m(1+i)12若取z=25,z=4212542−325Δi==0.008<1%,1253"由于a=134mm0,所以该对齿轮传动为正传动。与采用12标准齿轮传动相比较,该对齿轮传动的轮齿磨损较小,齿根弯曲强度较高,但重合度有所下降,互换性差。应检验的条件是重合度和齿轮的齿顶圆齿厚是否满足要求,即ε≥[ε],共67页第42页
机械原理教研室编s≥0.25m。a8-17一对渐开线外啮合标准斜齿圆柱齿轮传动,已知z=21,z=51,m=4mm,12nα=20ο,h*=1,c*=0.25,β=15ο,轮齿宽度B=30mm。试计算这对齿轮传动nann的中心距a和重合度ε。解:齿轮传动的中心距a为mn(z1+z2)4×(21+51)a===149.08mm2cosβ2cos15°tanαntan20°tanα===0.3768tcosβcos15°所以α=arctan0.3768=20.65°tm4nr=zcosα=×21cos20.65°=40.69mmbt11t2cosβ2cos15°mn*4r=z+mh=×21+4×1=47.48mmat11nan2cosβ2cos15°rbt140.69α=arccos=arccos=31.02°at1r47.48at1m4nr=zcosα=×51cos20.65°=98.81mmbt22t2cosβ2cos15°mn*4r=z+mh=×51+4×1=109.60mmat22nan2cosβ2cos15°rbt298.81α=arccos=arccos=25.64°at2r109.60at21ε=[z(tanα−tanα")+z(tanα−tanα")]t1at1t2at2t2π1=[21(tan31.02°−tan20.65°)+51(tan25.64°−tan20.65°)]2π=1.5871BtanβbBsinβ30×sin15°ε====0.6179βPπm4πbtn共67页第43页
机械原理教研室编最后得重合度ε为ε=ε+ε=1.5871+0.6179=2.205tβ8-18一阿基米德蜗杆蜗轮传动,蜗轮的齿数z=40、分度圆直径d=200mm,22蜗杆为单头。确定ω1(1)传动比i=,其中ω为蜗杆的转速,ω为蜗轮的转速;1212ω2(2)蜗轮端面模数m,蜗杆的轴面模数m,分度圆直径d;t2a11(3)蜗杆分度圆升角λ;1(4)中心距a。ωz4012解:(1)、传动比i====4012ωz121d2002(2)、蜗轮端面模数m===5mmt2z402根据蜗杆蜗轮传动的正确啮合条件可得蜗杆的轴面模数m=m=5mma1t2再根据国家标准规定的蜗杆模数与分度圆直径对应关系,选取蜗杆的分度圆直径d=90mm1ωr12(3)、因为i==12ωrtanλ211r1002所以蜗杆分度圆升角λ=arctan=arctan=3.18°,同时λ也可以由以11ri45×40112下公式确定:λZ1pa1Z1ma11×5ο=arctan=arctan=arctan=3.181πdd901111(4)、中心距a=(d+mz)=×(90+5×40)=145mm12228-20在题8-20图中,已知蜗杆的转速n=900r,z=60,z=25,1min22"z=20,z=25,z=20,z=30,z=35,z=28,z=135。33"44"55"6共67页第44页
机械原理教研室编ωωω125"(1)写出i=,i=,i=的表达式;16265"6ωωω666(2)确定n的大小和转向。6方向n6题8-20图ωz⋅z⋅z⋅z⋅z123456解:(1)、i==。由于蜗杆1和齿轮6的轴心线既不平行,也16ω62⋅z2′⋅z3′⋅z4′⋅z5′不重合,所以转向关系必须用通过划箭头来表示;ωz⋅z⋅z⋅z23456i==+,“+”表示齿轮2和齿轮6的转向相同;26ω6z2′⋅z3′⋅z4′⋅z5′ω5′z6i5′6==+;齿轮5’和齿轮6为内啮合,转向相同。ω6z5′ω1z2⋅z3⋅z4⋅z5⋅z660×20×20×35×135(2)、因为i====10816ω62⋅z2′⋅z3′⋅z4′⋅z5′2×25×25×30×28n900所以n=1==8.33r,方向“↑”,如图所示。6i108min168-22题8-22图为一用于自动化照明灯具的轮系,已知n=19.5r,z=60,z=40,1min13z=z=30,40=z,z=120。22"45(1)轮系属于什么类型的周转轮系;(2)确定箱体的转速和转向。共题8-2267页第图45页
机械原理教研室编解:(1)、因为轮系的自由度F=3n−2P−P=3×4−2×4−3=1lh所以该周转轮系属于行星轮系。轮系中有一个太阳轮是固定不动的。H3n1−nHz2⋅z3⋅z530×40×120(2)、i=(−1)=−=−=−215n5−nHz1⋅z2′⋅z460×30×40因为n=05n1所以i==31HnHn19.5最后得箱体的转速为n=1==6.5r,方向与n相同。Hmin1i31HωA8-23计算题8-23图所示大减速比减速器的传动比i=。AGωG解法1:将轮系分为两个周转轮系①齿轮A、B、E和系杆C组成的行星轮系;②齿轮A、E、F、G和系杆C组成的差动轮系。ω−ωz47CACBi==−=−ABω−ωz15BCA15因为ωB=0,所以ωC=ωA62CωA−ωCzE⋅zG16×50i==−=−AGω−ωz⋅z15×17GCAF15将ω=ω代入上式,最后得题8-23图CA62ωAi==3306.67AGωG解法2:将轮系分为两个周转轮系①齿轮A、B、E和系杆C组成的行星轮系;②齿轮B、E、F、G和系杆C组成的行星轮系。ω−ωz47CACBi==−=−ABω−ωz15BCAωz62ωAB由B=0得=1+=ωz15CA共67页第46页
机械原理教研室编CωG−ωCZFZB17×47i===GBω−ωZZ50×16BCGEωGzFzB17×47由ωB=0得=1−=1−ωzz50×16CGEωA62ωAωC15i====3306.67AGωGωG17×471−ω50×16C由于行星轮系的分析和计算比差动轮系简单,所以,解法二在计算方面比较简单,计算量小。8-24写出题8-24图中ω,ω,ω之间的关系,设已知各个齿轮的齿数。13H题8-24图ω−ωzH1H3解:(a)、i==−13ω−ωz3H1ω−ωz⋅zz⋅zH1H22323(b)、i==(−1)=13ω3−ωHz1⋅z2′z1⋅z2′ω−ωz⋅zH1H23(c)、i==−13ω3−ωHz1⋅z2′8-25题8-25图所示为一提升重物装置。蜗杆E为右旋。当卷筒直径为250㎜,齿轮A的转速为700r/min时,确定重物上升的速度和齿轮A的正确转向。解:轮系是由定轴轮系(A-B-C-D-E-F-G)和周转轮系(G-K-H-L-M)组成的混合轮系。共67页第47页
机械原理教研室编对定轴轮系(A-B-C-D-E-F-G),有nA题8-25图nz⋅z⋅z42×39×56ABDFi====78AGnz⋅z⋅z28×21×2GACE对周转轮系(G-K-H-L-M),有GnK−nG2zH⋅zM47×33i==(−1)==1.81KMn−nz⋅z22×39MGKLnG因为n=0,所以i==2.238KGMnMnnnAAG进一步有i==⋅=78×2.238=174.564AMnnnMGMn700所以n=A==4rMi174.564minAMπDπ250mm最后得重物上升的速度为v=n⋅⋅=4××=52.36M302302snG当要求重物上升时,卷筒的转向朝上,由i==2.238>0可知齿轮MGMnM和系杆G的转向一致,所以,G(F)的转向也向上,再根据蜗杆蜗轮传动和外啮合齿轮传动转向关系,可以确定出齿轮A的正确转向为逆时针方向,如图所示。8-26在题8-26图所示的轮系中,问当齿轮A转动一转时,齿轮L转动几转?两者的转向是否一致?画出轮系的拓扑图,根据其拓扑图确定轮系的自由度。解:轮系是由定轴轮系(A-B)、(A-D)和周转轮系(E-F-G-H-J-K-L-M)组成的混合轮系。对定轴轮系(A-B),有共67页第48页题8-26图
机械原理教研室编nz40ABi==−=−=−2ABnz20BA因为n=n,所以n=−0.5nBMMA对定轴轮系(A-D),有nAzD242i==−=−=−ADnz363DC因为n=n,所以n=−1.5nDEEA对周转轮系(E-F-G-H-J-K-L-M),有MnE−nMzF⋅zJ⋅zL100×40×85i==−=−=−6.3ELn−nz⋅z⋅z30×40×45LMEGK将n=−0.5n,n=−1.5n代入上式,最后得MAEAnLi==−0.34LAnA即,当齿轮A转动一转时,齿轮L转动0.34转,由于i<0,所以齿轮L的转向LA与齿轮A相反。因为eg=v−1−F;D(E)A(C)而由拓扑图可知顶点的数目v=8,F(G)齿轮幅的数目e=6,g所以轮系的自由度为OB(M)HF=v−1−e=8−1−6=1gLJ(K)拓扑图8-27题8-27图中,n,n为轮系的输入运动,C为轮系的运动输出构件。已知ABn=50r/min,n=100r/min,确定转速n的大小和转向。ABC共67页第49页
机械原理教研室编ncn(64)c(a)(b)题8-27图解:(a)、轮系是由定轴轮系(1-2)和周转轮系(2-3-4-4’-5)组成的混合轮系。对定轴轮系(1-2),有n1nAz2306i===−=−=−12nnz2552215即n=−n2A6对周转轮系(2-3-4-4’-5),有2n3−n2nB−n22z4⋅z550×4545i===(−1)==35n5−n2nC−n2z3⋅z4′20×35145将n=50r,n=−100r,n=−n代入上式,最后得AminBmin26An=−59.8r,其中“-”表示齿轮5的转向与n相同,方向“↓”,如图所CminB示。(b)、轮系是由定轴轮系(4-5-6)和周转轮系(1-2-2’-3-4)组成的混合轮系。对定轴轮系(4-5-6),有n4n4z6243i=====46nnz3246B43即n=n4B4对周转轮系(1-2-2’-3-4),有4n1−n4nA−n4z2⋅z334×6417i===−=−=−13n3−n4nC−n4z1⋅z2′32×3693将n=50r,n=100r,n=n代入上式,最后得AminBmin44Bn=88.24r,n>0表示转向与n(n)相同,方向“↓”,如图所示。CminCAB共67页第50页
机械原理教研室编10-1试求出题10-1图中机构的最小传动角和最大压力角。B′α=0°vFαmax题10-1图lAB+e30+25解:(a)、sinα===0.4583maxl120BC所以最大压力角α=arcsin0.4583=27.28°max最小传动角γ=90°−α=90°−27.28°=62.72°minmax(b)、最大压力角α=0°max最小传动角γ=90°−α=90°−0°=90°minmax10-2标出题10-2图所示机构在图示位置的传动角。解:(a)对于该机构,在滑块C处有一传动角γ,c如图所示;在滑块D处也有一传动角γD,如图vc所示。Fcγ(b)从动件4受到的驱动力是由构件3提供的。c构件4的速度v很好确定,而构件3作用于构件γDFD4的驱动力的方向的确定应当按照下面的步骤v进行:①根据构件3上受有三个力、三个力应当D汇交于一点可以确定出构件4作用在构件3上的力;②根据作用力和反作用力的关系,确定出构(a)件3作用在构件4上的力的方向。共67页第51页
机械原理教研室编图示机构在图示位置的传动角γ分别如图中所示。γFv(b)10-5标出题10-5图中各个凸轮机构在图示位置时的压力角。凸轮为主动件。vαvvnαnαvnnα=0°nnnn题10-5图解:图中各个凸轮机构在图示位置时的压力角α如图所示。nαvBB′AO30°ωA′共n67页第52页题10-6图
机械原理教研室编10-6在题10-6图中,凸轮为主动件,画出凸轮逆时针转过30º时机构的压力角。解:利用反转法,即将凸轮固定、机架和从动件沿与凸轮转向相反的方向运动,固定铰链点A从点A“反转”到点A’,从动件从AB运动到A’B’,再由点B’的速度方向和从动件的受力方向确定出凸轮逆时针转过30º时机构的压力角α,如图所示。原教材6-8在题6-8图中凸轮为半径为R的圆盘,凸轮为主动件。(1)写出机构的压力角α与凸轮转角之间的关系;(2)讨论如果α≥[α],应采用什么改进设计的措施?解:(1)、当凸轮转动任意角δ时,其压力角α如图所示。由图中几何关系有e−ecosδsinα=R+rr所以机构的压力角α与凸轮转角δ之间的关系为e−ecosδα=arcsin()R+rr(2)、如果α≥[α],则应减小偏距e,增大圆盘半径R和滚子半径rr。rrRαnnAeOωδ题6-8图10-10在题10-1图所示的机构中,以构件1为主动件机构是否会出现死点位置?以构件3为主动件,机构是否会出现死点位置?画出机构的死点位置,并标明机构的主动件是哪一个构件。共67页第53页
机械原理教研室编题10-1图解:在图示机构中,当以构件1为主动件时,机构不会出现死点位置;当以构件3为主动件时,机构会出现死点位置,其死点位置分别如下图示。B2AvB31C2C1(a)v3AB13B2(b)10-12利用移动副的自锁条件推出:螺旋副中以轴向载荷Q为主动力时(即:反行程),螺旋副的自锁条件为式λ≤ϕ。RnPϕRvPλnλ−ϕQQ共67页第54页
机械原理教研室编解:当反程时,载荷Q为主动力,P为阻力。由移动副自锁的条件,反程驱动力Q与接触面法线n---n的夹角λ必须小于或等于斜面与滑块之间的摩擦角ϕ,即λ≤ϕ例10-2在图10-17a所示的机构中,已知各构件的尺寸及机构的位置,各转动副处的摩擦圆半径、移动副及凸轮高副处的摩擦角ϕ,凸轮为主动件,顺时针转动,作用在构件4上的工作阻力Q的大小。试求图示位置:(1)各运动副的反力;(2)需施加于凸轮1上的驱动力矩M。1解:选取长度比例尺μL(m/mm)作机构运动简图。(1)确定各运动副中反力的方向。由主动件凸轮的转向,确定出机构中各个构件之间的相对运动方向,如图10-17a所示。共67页第55页
机械原理教研室编图10-17凸轮连杆机构考虑摩擦的机构力分析分析各个构件受到的运动副反力和外力。构件1受到的力有R51、R21、M;构件2受到1的力有R52、R12、R32;构件3受到的力有R23、R43;构件4受到的力有R34、R54、Q。先确定凸轮高副处点B的反力R12的方向,与移动副反力方向确定方法相同,该力方向0与接触点处的相对速度VB2B1的方向成90+ϕ角。再由R51应切于运动副A处的摩擦圆,与R21大小相等方向相反,且对A之矩的方向与ω1方向相反,确定出R51的方向。R51与R21形成一个力偶与M1平衡;由于连杆3为受拉二力构件,其在D、E两转动副处所受两力R23及R43应切于该两处摩擦圆,大小相等方向相反,在一条直线上。同时,根据相对转速ω,ω的方向,可确定出3234R23及R43的作用线和方向,亦即铰链点D、E的摩擦圆的内公切线。;反力R52应切于运动副C处的摩擦圆,且对C之矩的方向应与ω25的方向相反,同时构件共67页第56页
机械原理教研室编2受有的三个力R12、R52、R32应汇交于一点,由此可确定出R52的方向线;0滑块4所受反力R54应与V45的方向成90+ϕ角,它受到的三个力R34、R54及Q也应汇交于一点,于是可定出R54的方向线。依照以上的步骤和方法,确定出各个运动副反力的作用线和方向,如图10-17(b)所示。(2)求各运动副处的反力大小。分别取构件2、4为分离体,列出力平衡方程式为ϖϖϖ构件2R+R+R=0123252ϖϖϖ构件4R+R+Q=03454ϖϖϖϖ而R=−R=R=−R34432332根据上述力方程式,选取力比例尺μF(N/mm),从已知力Q画起,作出力多边形,如图10-17(C)所示。由图可得各总反力R=RμiiF其中R为力多边形中第i个力的图上长度(mm)。i(3)求需施加于凸轮1上的驱动力矩M。由凸轮1的平衡条件可得1M=Rlμ=R21μlμ(Nm)121LFL式中l为R21与R51两方向线的图上距离,单位为mm。10-17题10-17图所示为按μL=0.001m/mm画的机构运动简图,滑块3为原动件,驱动力0P=80N。各转动副处的摩擦圆如图中所示,滑块与导路之间的摩擦角ϕ=20,试求在图示位置,构件AB上所能克服的阻力矩MQ的大小和方向。解:首先确定各个运动副中的反力的方向如图所示。选取构件3为分离体,再选取力比例尺μ,作出其力多边形,如图所示。F在力多边形中,量得力R的长为18mm,力P的长为20mm,231818所以R=P=×80=72N232020共67页第57页
机械原理教研室编构件2为二力杆,所以R=R=R=R=72N21123223最后得构件AB上所能克服的阻力矩MQ的大小为M=Rlμ=72×10×0.001=0.72N⋅mQ21l阻力矩MQ的方向为逆时针方向,如图所示。ϕMQR03RR3201RR2321lR23R12R03P题10-17图10-18题10-18图所示为按μL=0.001m/mm绘制的机构运动简图。已知圆盘1与杠杆2接触0处的摩擦角ϕ=30,各转动副处的摩擦圆如图中所示,悬挂点D处的摩擦忽略不计。设重物Q=150N,试求出在图示位置时,需加在偏心圆盘上的驱动力矩M1的大小。Rl31R12R32R32R12QR21Q题10-18图解:首先确定各个运动副中的反力的方向如图所示。选取构件2为分离体,再选取力比例尺μ,作出其力多边形,如图所示。F共67页第58页
机械原理教研室编2020R=Q=×150=231N121313依据作用力与反作用的关系,得R=R=231N2112最后得需加在偏心圆盘上的驱动力矩M1的大小为M=Rlμ=231×14×0.001=3.2N⋅m121l例10-6图10-19所示为斜面压榨机。确定在以Q为主动力的行程中机构的自锁条件。设所有移动副的摩擦角均为ϕ。解:首先利用考虑摩擦机构力分析的步骤和方法,求出驱动力Q与工作阻力P之间的关系Q=Pcot(α−2ϕ)理想驱动力为Q=Pcotα0效率为图10-19斜面压榨机力分析"Q0tan(α−2ϕ)η==Qtanα令η"≤0得自锁条件:α≤2ϕ。10-20题10-20图所示机构,作用于构件3上的P为驱动力,作用于构件1上的Q为生产阻力。各转动副处的摩擦圆如图中所示;各移动副处的摩擦系数均为f,各构件惯性力、重力忽略不计。(1)机构处于死点位置时,连杆2与水平线之间的夹角θ为多大?(2)机构自锁时,连杆2与水平线之间的夹角θ为多大?共67页第59页
机械原理教研室编R32ϕR23R03βR21R12ϕR01题10-20图解:(1)、机构处于死点位置时,其传动角为零度。所以连杆2与水平线之间的夹角θ为90°。(2)、机构自锁时,应有90°−(θ+β)≤ϕ即θ≥90°−(β+ϕ)2ρr式中:β=arcsin,ϕ=arctanf。ρ为摩擦圆的半径,l为连杆ABrABlAB的杆长。所以最后得2ρrθ≥90°−(arcsin+arctanf)lAB例11-1对图11-4a所示转子进行动平衡,平衡平面为Ⅰ--Ⅰ和Ⅱ--Ⅱ。解:将各个质量的质径积分解到两个平衡平面中:在平衡平面Ⅰ--Ⅰ中有:共67页第60页
机械原理教研室编图11-4刚性转子的动平衡mr(300−100)(I)11mr==60gmm11300mr120(I)22mr==240gmm22300各个质径积分量如图11-4(b)所示。在平衡平面Ⅱ--Ⅱ中有:mr100(II)11mr==30gmm11300mr(300+120)(II)22mr==840gmm22300各个质径积分量如图11-4(c)所示。确定在各个平衡平面中应加平衡质量的质径积:在平衡平面Ⅰ--Ⅰ中共67页第61页
机械原理教研室编(I)(I)0(I)00mbrbx=−[m1r1cos(−90)+m2r2cos(180+45)]=169.71gmm(I)(I)0(I)00mbrby=−[m1r1sin(−90)+m2r2sin(180+45)]=229.71gmmmr(I)=mr(I)2+mr(I)2=285.60gmmbbbbxbby(I)mbrby0θ=arctan()=53.541(I)mbrbx如图11-4(b)所示。在平衡平面Ⅱ--Ⅱ中(II)(II)0(II)0mbrbx=−[m1r1cos(−90)+m2r2cos45]=−593.96gmm(II)(II)0(II)0mbrby=−[m1r1sin(−90)+m2r2sin45]=−563.96gmmmr(II)=mr(II)2+mr(II)2=819.05gmmbbbbxbby(II)mbrby0θ=arctan()=43.572(II)mbrbx如图11-4(c)所示。11-3设题11-3图所示系统的转速为300r/min,R1=25mm,R2=35mm,R3=40mm,m1=2kg,m2=1.5kg,m3=3kg。求轴承A和轴承B处的轴承反力。若对转子进行静平衡,平衡质量mb位于半径Rb=50mm处,求它的大小与角位置。题11-3图解:转速为ω=2πn=2π×300=31.42rad6060s偏心质量1产生的离心惯性力为22F=mRω=2×0.025×31.42=49.36N111偏心质量2产生的离心惯性力为22F=mRω=1.5×0.035×31.42=51.83N222共67页第62页
机械原理教研室编偏心质量3产生的离心惯性力为22F=mRω=3×0.04×31.42=118.47N333F=Fcos90°+Fcos195°+Fcos285°=−19.40Nx123F=Fsin90°+Fsin195°+Fsin285°=−78.49Ny1232222所以总的离心惯性力为F=F+F=(−19.40)+(−78.49)=80.85Nxy对轴承A取矩,有1000N=200FB200所以轴承B处的轴承反力为N=F=16.17NB1000而轴承A处的轴承反力为N=F−N=64.68NAB设平衡质量为m,方位用与x轴正向之间的夹角为α表示b在x方向上:mRcos90°+mRcos195°+mRcos285°+mRcosα=0112233bb在y方向上:mRsin90°+mRsin195°+mRsin285°+mRsinα=0112233bb所以由以上两式可得mRsin90°+mRsin195°+mRsin285°112233tanα==4.0452mRcos90°+mRcos195°+mRcos285°112233最后得平衡质量mb的方位α=arctan4.0452=76.11°平衡质量mb的大小m=1.64kgb11-8在题11-8图所示的行星轮系中,已知各轮的齿数为z1=z2=20,z3=60,各构件的质心均在其相对回转2轴线上,它们的转动惯量分别为J1=J2=0.01kg·m,2JH=0.16kg·m,行星轮2的质量m2=2kg,模数m=10mm,作用在系杆H上的力矩MH=40N·m,方向与系杆的转向相反。求以构件1为等效构件时的等效转动惯量J’。题11-8图e和MH等效力矩Me解:当以构件1为等效构件时的等效转动惯量为ω22vO22ωH2J=J+J()+m()+J()e122Hωωω111共67页第63页
机械原理教研室编ω−ωzH1H3因为i==−13ω−ωz3H1ωz20H1又因为ω=0,所以===0.253ωz+z20+60113−3vO2rHωHm(z1+z2)ωH10×10×(20+20)===×0.25=0.05ωω2ω2111ω−ωzH2H3因为i==23ω−ωz3H2ωz−z20−60223又因为ω=0,所以===−23ωz20H2ωωω22H所以=⋅=−2×0.25=−0.5ωωω1H1从而得2222J=0.01+0.01×(−0.5)+2×(0.05)+0.16×(0.25)=0.0275kg⋅me当以构件1为等效构件时MH的等效力矩为ωHM=−M()=−40×0.25=−10N⋅meHω1例13-2机械系统的等效驱动力矩和等效阻力矩的变化如图13-9(a)所示。等效构件的平均角速度为1000r/min,系统的许用运转速度波动系数δ=0.05,不计其余构件的转动惯量。求所需飞轮的转动惯量。解:由图中的几何关系可以求出各个盈、亏功的值如下1π1πΔW=ab×500=+500×;ΔW=bc×(1000−500)=−500×;12282413π1πΔW=cd×500=+500×;ΔW=de×(1000−500)=−500×;34216281π1πΔW=ef×500=+500×;ΔW=fg×(1000−500)=−500×;5628281πΔW=ga"×500=+500×7216共67页第64页
机械原理教研室编其中“+”表示盈功,“—”表示亏功。图13-9等效力矩和示功图画出示功图,如图13-9(b),先画出一条水平线,从点a开始,盈功向上画,亏功向下画。示功图中的最低点对应ω,最高点对应ω。由图13-9(b)可以看出,点b最高,minmax则在该点系统的角速度最大;点c最低,系统的角速度最小。则ΔW的积分下限和上限max应为图13-9(a)中的点b和点c。πΔW=500Nmmax4ΔWmax900ΔWmax2J===0.716kgmF222[δ]ω[δ]nπmm13-6已知某机械稳定运转时的等效驱动力矩和等效阻力矩如题13-6图(a)所示。机械的等2效转动惯量为Je=1kg·m,等效驱动力矩为Md=30Nm,机械稳定运转开始时等效构件的角速度ω0=25rad/s,试确定(1)等效构件的稳定运动规律ω(φ);共67页第65页
机械原理教研室编(2)速度不均匀系数δ;(3)最大盈亏功ΔWmax;(4)若要求[δ]=0.05,系统是否满足要求?如果不满足,求飞轮的转动惯量JF。ΔE0ππ2πϕ(a)2(b)题13-6图π解:(1)、因为M2π=M(π−)dr2所以M=4M=4×30=120Nmrd1212ϕ又因为Jeω−Jeω0=∫(Med−Mer)dϕ2202ϕ2则ω=ω+(M−M)dϕ0∫ederJ0e即等效构件的稳定运动规律为⎧22ϕπ⎪25+∫(30−0)dϕ0≤ϕ≤J02⎪e⎪π⎪222ϕπω=⎨25+∫2(30−0)dϕ+∫π(30−120)dϕ≤ϕ≤πJ0J2⎪ee2⎪π222π2ϕ⎪25+∫2(30−0)dϕ+∫π(30−120)dϕ+∫(30−0)dϕπ≤ϕ≤2π⎪J0J2Jπ⎩eee⎧π625+60ϕ0≤ϕ≤⎪2⎪⎪π化简得ω=⎨625+120π−180ϕ≤ϕ≤π⎪2⎪625−120π+60ϕπ≤ϕ≤2π⎪⎩(2)、计算各个盈、亏功1ΔW=π⋅M=+15π1d2共67页第66页
机械原理教研室编1ΔW=(π−π)⋅(M−M)=−45π2rd2ΔW=(2π−π)⋅M=+30π3d根据图(a)画出系统动能的变化示意图,如图(b)所示。从图中可知,在π2处系统的角速度最大,在π处系统的角速度最小。π21212(M−M)dϕ=Jω−Jω∫ederemaxe0022π21212即(30−0)dϕ=×1×ω−×1×25∫max022所以ω=26.82radmaxsπ1212∫π(Med−Mer)dϕ=Jeωmin−Jeωmax222π1212即∫π(30−120)dϕ=×1×ωmin−×1×26.82222所以ω=20.89radmins11radω=(ω+ω)=×(26.82+20.89)=23.855m2maxmin2s所以速度不均匀系数为ωmax−ωmin26.82−20.89δ===0.25ω23.855m(3)、最大盈亏功为ππΔWmax=∫π(Med−Mer)dϕ=∫π(30−120)dϕ=45π=141.37Nm22(4)、若要求[δ]=0.05,系统不能满足要求。飞轮的转动惯量为ΔWmax141.372J=−J=−1=3.97kg⋅mF2e2ω[δ]23.855×0.05m共67页第67页'
您可能关注的文档
- 西南交1112考试批次《电机与拖动II》复习题及参考答案.doc
- 西南交1112考试批次《画法几何及工程制图B》复习题及参考答案.doc
- 西南交1112考试批次《画法几何及工程制图》复习题及参考答案.doc
- 西南交1112考试批次《第三方物流企业经营与管理》复习题及参考答案.doc
- 西南交1112考试批次《计算机文化基础》复习题及参考答案.doc
- 西南交1212考试批次《机械CAD》复习题及参考答案.doc
- 西南交1212考试批次《电路分析AII》复习题及参考答案.doc
- 西南交大工程测量习题答案.doc
- 西南交自考《房屋建筑构造》复习题及参考答案.pdf
- 西南大学入学测试机考《数学(高起点)》模拟题及答案.doc
- 西安交大《机械设计基础》课后习题答案综合版.doc
- 西安交大景思睿、张鸣远版《流体力学》课后习题及答案.pdf
- 西安交通大学17年3月课程考试《普通物理》作业考核试题及答案.doc
- 西政 中国法制史课后习题参考答案.doc
- 西政_中国法制史课后习题参考答案.doc
- 西方哲学智慧课后习题.docx
- 西方经济学(宏观部分)习题及参考答案.doc
- 西方经济学--习题答案修订(陈喜强版).pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明