
- 3.90 MB
- 2022-04-22 11:27:44 发布


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
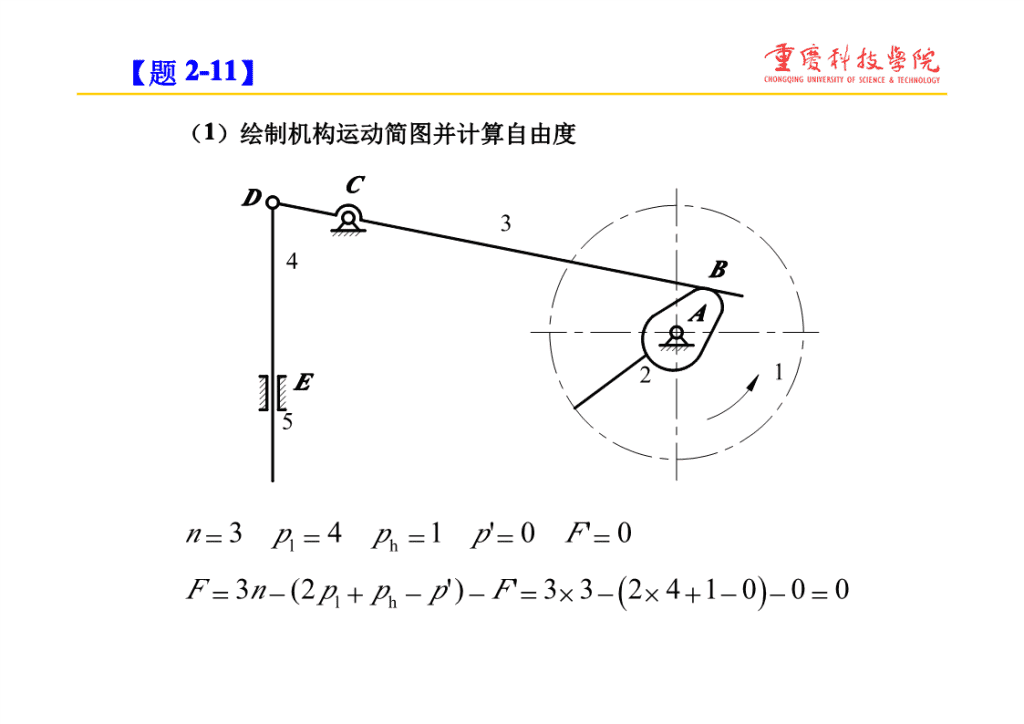
'【题2-11】图示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮1输入,使轴A连续回转,而固定装在轴A上的凸轮2与杠杆3组成的凸轮机构,将使冲头4上下运动以达到冲压的目的。试绘制其机构运动简图,分析其是否能实现设计意图,并提出修改方案。关于我国金融分业经营和混业经营的分析
【题2-11】(1)绘制机构运动简图并计算自由度CD34BA21E5n=3p=4p=1p"=0F"=0lhF=3n−(2p+p−p")−F"=3×3−(2×4+1−0)−0=0lh
【题2-11】(2)修改方案一DC63FBA421E5
【题2-11】(2)修改方案二6DCF3B4A21E5
【题2-12】图示为一小型压力机。图中齿轮1与偏心轮1′为同一构件,绕固定轴心O连续转动。在齿轮5上开有凸轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C轴上下摆动;同时又通过偏心轮1′、连杆2、滑杆3使C轴上下移动;最后通过在摆杆4的叉槽中的滑块7和铰链G使冲头8实现冲压运动。试绘制其机构运动简图,并计算其自由度。
【题2-12】(1)绘制机构运动简图(2)计算自由度7D处为局部自由度6D4GCFn=8p=10p=2lhEp"=0F"=1H583F=3n−(2p+p−p")−F"Blh=3×8−(2×10+2−0)−12=1I9ω1OA
【题2-13】图示为一新型偏心轮滑阀式真空泵。其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。当偏心轮1按图示方向连续回转时,可将设备中的空气吸入,并将空气从阀5中排出,从而形成真空。试绘制其机构运动简图,并计算其自由度。
【题2-13】(1)绘制机构运动简图DC4(2)计算自由度6n=3p=4p=0p"=0F"=0Alh21ωF=3n−(2p+p−p")−F"lhB=3×3−(2×4+0−0)−0=1
【题2-16(a)】计算图示齿轮-连杆组合机构的自由度。A为复合铰链n=4p=5p=1lhp"0=F"0=F=3n−(2p+p−p")−F"lh=3×4−(2×5+1−0)−0=1
【题2-16(b)】计算图示凸轮-连杆组合机构(图中D处为铰链在一起的两个滑块)的自由度。B、C两处为局部自由度,构件3和5分别与机架8虽各有两处接触,但分别只能算一个移动副n=7p=8p=2lhp"=0F"=2F=3n−(2p+p−p")−F"lh=3×7−(2×8+2−0)−2=1
【题2-16(c)】计算图示精压机构的自由度。K、F、C三处为复合铰链,KM、FJ等2个构件为不影响机构运动传递的重复部分n′=2pl′=4ph′=0p"=2pl′+p′h−3n′=2×4+0−3×2=2n=11pl=17ph=0F"=0F=3n−(2p+p−p")−F"lh=3×11−(2×17+0−2)−0=1
【题2-16(d)】计算图示齿轮-连杆组合机构的自由度。齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同,为什么?A、B、C三处为复合铰链,齿轮5与齿条7在齿的两侧均保持接触,且接触点的公法线方向彼此不重合,为两个高副n=6p=7p=3lhp"=0F"=0F=3n−(2p+p−p")−F"lh=3×6−(2×7+3−0)−0=1
【题2-23】图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。如果在该机构中改选EG为原动件,试问组成此机构的基本杆组是否与前有所不同。(1)计算自由度DJ3n=7p=10p=02ClhB4p"=0F"=0H1EI7A5F=3n−(2p+p−p")−F"lh8F6=3×7−(2×10+0−0)−0=1G
【题2-23】(2)以AB杆为原动件时机构的基本杆组分析DJ32CB41EHI√A578F6G
【题2-23】(2)以AB杆为原动件时机构的基本杆组分析DJ32BC14HIA7√E685FG
【题2-23】(2)以AB杆为原动件时机构的基本杆组分析DJ23BC14HIA7E√685FG以构件AB为原动件时机构的基本杆组如上图所示此机构为Ⅱ机构
【题2-23】(3)以EG杆为原动件时机构的基本杆组分析DJ32C4BHEI17×5AF68G
【题2-23】(3)以EG杆为原动件时机构的基本杆组分析DJ3C24BHEI175×AF68G
【题2-23】(3)以EG杆为原动件时机构的基本杆组分析DJ32CB4H1EI√7A5F68G
【题2-23】(3)以EG杆为原动件时机构的基本杆组分析DJ32CB4H1EI7√A5F68G以构件EG为原动件时机构的基本杆组如上图所示此机构为Ⅲ机构
【题2-24(a)】试计算图示平面高副机构的自由度,并在高副低代后分析组成该机构的基本杆组。(1)计算自由度DC处为局部自由度,构件5机Fn3架6虽有两处接触,但只能算一个移动副E2C4Gn=5pl=6ph=1B5p"=0F"=1nAF=3n−(2p+p−p")−F"lh1F6=3×5−(2×6+1−0)−1=1
【题2-24(a)】(2)高副低代DF3EC42G5B1AF6
【题2-24(a)】(3)基本杆组的分析DF3E4C2G此机构为Ⅱ机构5B1A6
【题2-24(b)】试计算图示平面高副机构的自由度,并在高副低代后分析组成该机构的基本杆组。(1)计算自由度HF处为局部自由度,构件3与J65I机架8虽有两处接触,但只算一Gn7个移动副4Fn=7p=9p=1lhE3p"=0F"=1DDCF=3n−(2p+p−p")−F"nlh2B=3×7−(2×9+1−0)−1=11A8
【题2-24(b)】(2)高副低代HJ65IG7F4E3DDC2B1A8
【题2-24(b)】(3)基本杆组的分析HJ65IG7F4此机构为Ⅲ机构E3DC2B1A8
【题3-3(a)】试求图示机构在图示位置时全部瞬心的位置。P13∞P34P23P2433CC44BB1122P14∞AAP12
【题3-3(b)】试求图示机构在图示位置时全部瞬心的位置。P23∞P13P34B33B22P1244AAP2411CCP14∞
【题3-3(d)】试求图示机构在图示位置时全部瞬心的位置。P13P1444CC33P34∞P23MMBBP24vvMM22P12A11A
【题3-4】在图示的齿轮-连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω1/ω3解:欲求齿轮1与齿轮3的传动比,需求出P132C4EF3B5D1A6
【题3-4】欲P13,需求出P16、P36、P12、P2312由P14、P24、P12共线可得P12即为高副接触点由P25、P56、P26可得P26位于P25和P56的连线上63由P36、P26、P23共线可得P23即为高副接触点54
【题3-4】24CEFP12P23B5D1APP36P161363ωPP13613v=ωPPµv=ωPPµ=P13111613lP13333613lωPP31613
【题3-14】图示曲柄摇块机构中,已知lAB=30mm,lAC=100mm,lBD=50mm,lDE=40mm,曲柄以等角速度ω1=10rad/s回转。试用图解法求机构在ϕ1=45°位置时,D点和E点的速度和加速度,以及构件2的角速度和角加速度。解:(1)取μl=0.001m/mm作机构运动简图,如图所示,从图中量得lBC=123mmBDω2113CAφ14E
【题3-14】(2)对构件2上C点的速度进行分析vC2=vB2+vC2B2=vC3+vC2C3大小:?ω1lAB?0?方向:?⊥AB⊥BC∥BC取μv=0.05m/s/mm作速度多边形图c2Bp(c3)Dω2113CAφ14Eb2
【题3-14】根据速度影像原理,求D点和E点的速度作b2d:dc2=BD:DC,△b2de∽△BDE分别求得d和ecc22BDpp((cc33))2ω113CAφ14deEbb22
【题3-14】求D点和E点的速度和构件2的角速度,从速度多变形图中量得pd=4.51mm,pe=3.45mm,b2d=2mm,c3c2=3.45mm,c2vD=µvpd=0.05×4.51=0.226m/sp(c3)vE=µvpe=0.05×3.45=0.173m/svDB=µvb2d=0.05×2=0.1m/sdevDB0.1ω===2rad/s2l−3DB50×10b2vC2C3=µvc2c3=0.05×3.45=0.173m/s
【题3-14】(3)对构件2上C点的加速度进行分析nτkraC2=aB2+aC2B2+aC2B2=aC3+aC2C3+aC2C3大小:?ω2lω2l?02ωv?1AB2BC2C2C3方向:?B→AC→B⊥BC√∥BC2p2"(c"3)取μa=0.3m/s2/mm作加速度多边形图aB2=ω1lAB=3m/sBn22aC2B2=ω2lBC=0.492km/s"Dω2113Cc"2ak=2ωv=0.69m/s2Aφ1C2C32C2C34kaC2C3的方向:把vC2C3沿ω2的方向转90°Eb"n"2
【题3-14】根据加速度影像原理,求D点和E点的加速度作b2′d′:d′c′2=BD:DC,∆b2′d′e′∽∆BDE分别求得d′和e′Bpp"("(c"c"33))Dω2113CAφ14kk""c"c"22Ee"d"n"b"n"2b"2
【题3-14】求D点和E点的加速度和构件2的角加速度,从加速度多边形图量得p′d′=8.68mm,p′e′=9.44mm,n′c′2=3.45mmp"(c"3)2aD=µap′d′=0.3×8.68=2.6m/s2aE=µap′e′=0.3×9.44=2.83m/sk"τ2c"2aC2B2=µan′c2′=0.3×3.45=1.035m/sτa1.035e"C2B22α===8.41m/s2l−3d"BC123×10n"b"2
【4章和5章课后作业】图示为一焊接用楔形夹具,利用这个夹具把要焊接的工件1和1′预先夹妥,以便焊接。图中2为夹具,3为楔块,若已知各接触面间的摩擦角均为,ϕ试确定此夹具的自锁条件(即当夹紧后,楔块3不会自动松脱出来的条件)。23Fα11"
【第4章和5章补充题3】解:(1)求驱动力的表达式确定此夹具的自锁条件即确定其反行程时的自锁条件。该夹具反行程时为楔块3向右运动对机构进行受力分析,如图所示,由图可知反行程时FR23为驱动力2作出力多变形,如图所示。FR133F3α2φαFFR23FR1311"90°+FR23φF
【第4章和5章补充题3】(2)确定夹具自锁条件反行程时驱动力FR23的表达式FR13FR23Fcosϕ=()FR23=Fα2φsin(90°+ϕ)sinα−2ϕsin(α−2ϕ)当ϕ=0(不考虑摩擦力)时,理想驱动力的表达式为FFR230=sinα90°+FR23机构反行程时的效率为φFR230sin(α−2ϕ)Fη′==FR23sinαcosϕ令η′≤0,则机构的自锁条件为:α≤2ϕ
【题7-12】某内燃机的曲柄输出力矩Md随曲柄转角ϕ的变化曲线如图所示,其运动周期为ϕT=π,曲柄的平均转速nm=620r/min。当用该内燃机驱动一阻抗力为常数的机械时,如果要求其运转不均匀系数δ=0.01。试求:(1)曲轴最大转速nmax和相应的曲柄转角位置ϕmax;(2)安装在曲轴上的飞轮转动惯量JF(不计其余构件的转动惯量)。M(N.m)ABMd200COφ20°30°130°
【题7-12】解:(1)求等效阻力矩Mr由一个工作循环中驱动功等于阻抗功有ππ1ππ113π∫Mddϕ=∫Mrdϕ××200+×200+××200=πMr00296218700Mr=N⋅m6M(N.m)ABMd200COφπ/9π/613π/18
【题7-12】(2)作等效阻力矩变化规律曲线,如图中虚线所示,分别与OA、BC交于点D和E。由图可求得点D和E的横坐标分别为7π125πϕD=ϕE=108216M(N.m)AB200MdMrDE700/6OCφ7π/108125π/216π
【题7-12】(3)求各相应位置之间的盈亏功7π7π17π7007π7001225πW=108Mdϕ−108Mdϕ=××−×=−N⋅mOD∫d∫r00210861086324M(N.m)AB200MdMrDE700/6OC7π/108111π/21691π/216φ125π/216π
【题7-12】(3)求各相应位置之间的盈亏功125π125π2162161⎛π111π⎞⎛700⎞6125πW=Mdϕ−Mdϕ=S=×⎜+⎟×⎜200−⎟=N⋅mDE∫7πd∫7πrDABE262166216⎝⎠⎝⎠108108M(N.m)AB200MdMrDE700/6OC7π/108111π/21691π/216φ125π/216π
【题7-12】(3)求各相应位置之间的盈亏功ππ191π70091π70015925πWEC=∫125πMddϕ−∫125πMrdϕ=××−×=−N⋅m221662166648216216M(N.m)AB200MdMrDE700/6OC7π/108111π/21691π/216φ125π/216π
【题7-12】(4)作出系统的能量指示图,如图所示(5)求曲轴最大转速和相应的曲柄转角位置由图可知在E处机构出现能量最大值,即E处E的转速为最大值nmax,由此可得125πϕmax=ϕE=DEEC216WWmaxWωmax−ωminnmax−nminOδ==CωnODmmWω+ωn+nDmaxminmaxminωm=⇒nm=22⎛δ⎞⎛0.01⎞nmax=nm⎜1+⎟=620×⎜1+⎟=623.1r/min⎝2⎠⎝2⎠
【题7-12】(6)求安装在曲轴上的飞轮转动惯量JF由能量指示图可知:△Wmax=WDE=6125π/2166125π900×900∆Wmax2162JF≥==2.11kg⋅m22[]22πnmδ3.14×620×0.01EDEECWWmaxWOCODWD
【第7章补充题1】一机器作稳定运动,其中一个运动循环中的等效阻力矩Mr的变化规律如图所示,等效驱动力矩Md为常数。机器的等效转动惯量Je=1kg.m2,在运动循环开始时,等效构件的角速度ω=20rad/s,试求:(1)等效驱动力矩Md;(2)等效构件的ωmax与ωmin;并指出其出现的位置;确定运转速度不均匀系数δ;(3)最大盈亏功ΔWmax;(4)若要求运转速度不均匀系数δ≤0.1,则应在等效构件上加多大转动惯量的飞轮?M(N.m)Mr1000π3π/22πφ
【第7章补充题1】解:(1)求等效驱动力矩Md由一个工作循环中驱动功等于阻抗功有2π2ππ∫Mddϕ=∫Mrdϕ2πMd=×100Md=25N⋅m002(2)作等效驱动力矩变化规律曲线,如图中虚线所示。M(N.m)Mr100250π3π/22πφ
【第7章补充题1】(3)求各相应位置之间的盈亏功ππW0−π=∫Mddϕ−∫Mrdϕ=25×π−0=25πN⋅m003π3πππW=2Mdϕ−2Mdϕ=25×−100×=−37.5πN⋅mπ−3π∫d∫rππ2222π2ππW3π−=∫3πMddϕ−∫3πMrdϕ=25×−0=12.5πN⋅mπ2222
【第7章补充题1】(4)作出系统的能量指示图,如图所示π0-πWπ-3π/2maxWW2πo3/2π-2πW3π/2
【第7章补充题1】(5)求等效构件的ωmax与ωmin及其位置和运转速度不均匀系δ由图可知:在π和3π/2处为能量的最大值和最小值,故等效构件的ωmax和ωmin分别出现在π和3π/2处ππ1212W=Mdφ−Mdφ=Jω−Jω=25Nmπ⋅0−π∫0d∫0remaxe0223π3π221212W+W=Mdφ−Mdφ=Jω−Jω=−12.5Nmπ⋅0−π3π∫d∫remine0π−00222ωmax=23.6rad/sωmin=17.9rad/sω−ωω−ω23.617.9−δ=maxmin=maxmin==0.275ωω+ω23.617.9+mmaxmin22
【第7章补充题1】(6)求等效构件上所加飞轮的转动惯量JF由能量指示图可知:△Wmax=37.5πωmax+ωmin23.6+17.9ωm===20.75rad/s22ΔWmax37.5π2J≥−J=−=11.73kgm⋅F2e2ωδ20.75×0.1mπ0-πWπ-3π/2maxWW2πo3/2π-2πW3π/2
【题8-6】如图所示,设已知四杆机构各构件的长度为a=240mm,b=600mm,c=400mm,d=500mm。试问:(1)当取杆4为机架时,是否有曲柄存在?(2)若各杆长度不变,能否采用选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?(3)若a、b、c三杆的长度不变,取杆4为机架,要获得曲柄摇杆机构,d的取值范围应为何值?解:(1)因a为最短杆,b为最长杆,a+b=840<900=c+d且最短杆1为连架杆,故当取杆4为机架时有曲柄存在。
【题8-6】(2)由(1)可知,该四杆机构满足杆长条件,因此能够采用选不同杆为机架的办法获得双曲柄机构和双摇杆机构。要获得双曲柄机构,应取最短杆1为机架;要获得双摇杆机构应取最短杆1的对边杆3为机架。(3)要获得曲柄摇杆机构应满足杆长条件,且最短杆为连架杆。因1、2、3三杆长度不变,由此可知,杆1为最短杆,杆3为中间杆。当杆4为中间杆时,首先杆4的长度d应满足:240≤d≤600,同时还应满足:240+600≤400+d,由此可知:440≤d≤600当杆4为最长杆时,首先杆4的长度d应满足:600≤d<1240,同时还应满足:240+d≤400+600,由此可知:600≤d≤760综上可知:获得曲柄摇杆机构,d的取值范围:440≤d≤760
【题8-8】图示铰链四杆机构中,各杆长度l1=28mm,l2=52mm,l3=50mm,l4=72mm,试求:(1)当取杆4为机架时,该机构的极位夹角θ、杆3的最大摆角ϕ、最小传动角γmin和行程速度变化系数K;(2)当取杆1为机架时,将演化成何种类型的机构?为什么?并说明这时C、D两个转动副是周转副还是摆转副;(3)当取杆3为机架时,又将演化成何种机构?这时A、B两个转动副是否仍为周转副?
【题8-8】解:(1)作出机构的两个极位,极位夹角和最大摆角如图所示C2C2B3B21θC1φADB14
【题8-8】222222AD+AC−CD72+80−5022∠CAD=arccos=arccos=37.95°22×AD×AC2×72×802222222AD+AC−CD72+24−5011∠CAD=arccos=arccos=19.39°12×AD×AC2×72×241θ=∠CAD−∠CAD=37.95°−19.39°=18.56°21180°+θ180°+18.56°K===1.23180°−θ180°−18.56°
【题8-8】222222AD+DC−AC72+50−8022∠CDA=arccos=arccos=79.73°22×AD×DC2×72×502222222AD+DC−AC72+50−2411∠CDA=arccos=arccos=9.17°12×AD×DC2×72×501ϕ=∠CDA−∠CDA=79.73°−9.17°=70.56°21
【题8-8】作出主动曲柄与机架共线的两位置,两位置的传动角如图所示C""C2γ""B31C"γ"B"AB""D4
【题8-8】222222B"C"+DC"−B"D52+50−100γ"=arccos=arccos=157.27°2×B"C"×DC"2×52×50222222B""C""+DC""−B""D52+50−44γ""=arccos=arccos=51.06°2×B""C""×DC""2×52×50γ=min{180°−γ",γ""}=min{180°−157.27°,51.06°}min=min{22.73°,51.06°}=22.73°
【题8-8】(2)由题意知杆1为最短杆,杆4为最长杆,且l1+l4≤l2+l3,当取最短杆1为机架,该机构将演化成双曲柄机构。该机构满足杆长条件,故有周转副存在且位于最短杆上,而C、D两转动副不位于最短杆1上,故为摆转副。(3)由(2)知,该机构满足杆长条件,当取杆3为机架,杆3位于最短杆1的对边,该机构将演化成双摇杆机构。该机构满足杆长条件,故有周转副存在且位于最短杆上,而A、B两转动副位于最短杆1上,故为周转副。
【题8-23】如图所示,现欲设计一铰链四杆机构,设已知摇杆CD的长度lCD=75mm,行程速度变化系数K=1.5,机架AD的长度lCD=100mm,摇杆的一个极限位置与机架间的夹角ϕ=45°。试求曲柄的长度lAB和连杆的长度lBC(有两组解)。
【题8-23】解:θ=180°×(K-1)/(K+1)=36°,根据θ作出摇杆的另一极限位置,该极限位置有两处,如图所示的DC2、DC2′。C1C2B1"B2C2"DAB2"4B1
【题8-23】解:当摇杆的另一极限位置位于DC2时,则AC1为折叠共线,AC2为拉直共线22l=l+l−2×l×l×cos45°AC1ADDC1ADDC122=100+75−2×100×75×cos45°=70.84mm⎛lDC⎞⎛75⎞∠DAC=arcsin⎜1×sin∠ADC⎟=arcsin⎜×sin45°⎟=48.47°1⎜1⎟lAC⎝70.84⎠⎝1⎠∠DAC=∠DAC−∠CAC=48.47°−36°=12.47°2112⎛lAD⎞⎛100⎞∠DC2A=arcsin⎜×sin∠DAC2⎟=arcsin⎜×sin12.47°⎟=16.73°⎜lDC⎟⎝75⎠⎝2⎠
【题8-23】∠ADC=180°−∠DAC−∠DCA=180°−12.47°−16.73=150.8°222sin∠ADCsin150.8°2l=l×=100×=169.48mmAC2DAsin∠DCAsin16.73°2lAC−lAC169.48−70.84l=21==49.32mmAB22lAC+lAC169.48+70.84l=21==120.16mmBC22
【题8-23】解:当摇杆的另一极限位置位于DC2′时,则AC2′为折叠共线,AC1为拉直共线∠DC"A=180°−∠DC"C=180°−∠DCA=180°−16.73°=163.27°2222∠ADC"=180°−∠DAC−∠DC"A=180°−12.47°−163.27=4.26°222sin∠ADC"sin4.26°2l=l×=100×=25.8mmAC2"DAsin∠DC"Asin163.27°2lAC−lAC"70.84−25.8l=12==22.52mmAB22lAC+lAC"70.84+25.8l=12==48.32mmBC22
【题9-7(a)】试标出图示位置凸轮机构压力角,从图示位置转过90°后推杆位移
【题9-7(a)】αBCEωODAFHGs
【题9-7(a)】(1)圆盘凸轮圆心A与滚子中心B之间的连线与推杆道路之间所夹的锐角为图示位置凸轮机构的压力角α。(2)以A为圆心,AB为半径画圆得凸轮的理论轮廓线。(3)连接凸轮圆心A与凸轮转动中心O并延长,交凸轮的理论轮廓线于C点,以O为圆心,OA为半径画圆得凸轮的基圆。(4)以O为圆心,以O到推杆导路间的距离OD为半径画圆得推杆的偏距圆。(5)延长推杆导路线交基圆于E点,连接OE,过O点作OE的垂线,沿凸轮反转方向交基圆于F点,过F点作偏距圆的下侧切线切于G点,交理论轮廓线于H点,则线段FH即为凸轮从图示位置转过90°后推杆的位移s。
【题9-7(b)】试标出推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的压力角
【题9-7(b)】FsBCEφωGIDOAHα
【题9-7(b)】(1)方法与a图相同,分别作出凸轮的理论轮廓线、基圆、推杆的偏距圆。(2)延长推杆导路线交基圆于E点,连接OE。(3)以O为圆心,以滚子中心从B点升高s后滚子的中心F点到O点的距离OF为半径作圆弧,沿凸轮的反转方向交理论轮廓线于G点。(4)过G点作偏距圆的下侧切线,且于H点,交基圆于I点。(5)则∠EOI为推杆从图示位置升高位移s后凸轮的转角,∠AGH为此时凸轮机构的压力角。
【题9-14】试设计偏置直动滚子推杆盘形凸轮机构的理论轮廓线和工作轮廓线。已知:凸轮轴置于推杆轴线右侧,偏距e=20mm,基圆半径r0=50mm,滚子半径rr=10mm。凸轮以等角速度沿顺时针方向回转,在凸轮转过角δ1=120°过程中,推杆按正弦加速度运动规律上升h=50mm;凸轮继续转过δ2=30°时,推杆保持不动;其后,凸轮再回转角度δ3=60°时,推杆又按余弦加速度运动规律下降至起始位置;凸轮转过一周的其余角度时,推杆又静止不动。
【题9-14】⎛3δ1⎞⎛2π⎞推杆在推程段的位移方程:s=50⎜−sin3δ⎟⎜0≤δ≤⎟⎝2π2π⎠⎝3⎠⎛π⎞推杆在回程段的位移方程:s=251cos3(+δ)⎜0≤δ≤⎟⎝3⎠凸轮转角0π/92π/9π/34π/95π/92π/3推程推杆位移01.449.782540.2248.5650凸轮转角0π/18π/9π/62π/95π/18π/3回程推杆位移5046.6537.52512.53.350
【题9-14】ωC0B0C1B1C220C3B250B3OC4B4BB135C13B12C5BB116C12B10BB8B97C11C6C10C9C7C8
【题10-23】设有一渐开线标准齿轮,z=26,m=3mm,ha*=1,α=20°,求其齿廓曲线在分度圆和齿顶圆上的曲率半径及齿顶圆压力角。解:r=0.5mz=0.5×3×26=39mmr=rcosα=39×cos20°=36.65mmb*r=r+hm=39+1×3=42mmaa2222ρ=r−r=39−36.65=13.33mmb2222ρ=r−r=42−36.65=20.51mmaabr36.65bα=arccos=arccos=29.24°r42a
【题10-26】已知一对渐开线标准外啮合圆柱齿轮传动的模数m=5mm,压力角α=20°,中心距a=350mm,传动比i12=1.8,试求两轮的齿数、分度圆直径、齿顶圆直径、基圆直径以及分度圆上的齿厚和齿槽宽。解:a=0.5m(z+z)=350i=z/z=1.8121221z=50z=9012d=mz=5×50=250mmd=mz=5×90=450mm1122*d=d+2hm=250+2×1×5=260mma11a*d=d+2hm=450+2×1×5=460mma22ad=dcosα=250×cos20°=234.92mmb11d=dcosα=450×cos20°=422.86mmb22s=e=s=e=0.5πm=0.5×3.14×5=7.85mm1122
【题10-28】已知一对标准外啮合直齿圆柱齿轮传动的α=20°、m=5mm、z1=19、z2=42,试求其重合度。问当有一对齿轮在节点εaP处啮合时,是否还有其他轮齿也处于啮合状态;又当一对轮齿在B1点处啮合时,情况又如何?(参看教材图10-12)
【题10-28】r0.5mzcosαzcosαb解:cosα===a**r0.5mz+hmz+2haaazcosα19cos20°1=°′α=arccos=arccos3146a1*z+2h19+2×11azcosα42cos20°2=°′α=arccos=arccos2614a2*z+2h42+2×12az(tanα−tanα′)+z(tanα−tanα′)1a12a2ε=a2π19(tan31°46′−tan20°)+42(tan26°14′−tan20°)=2π=1.63
【题10-28】轮齿同时参与啮合的情况如下图所示
【题10-28】22(*)22BN=r−r=0.5mz+hm−(0.5mzcos20°)22a2b22a222=110−98.67=48.62mm22()22NP=r−r=0.5mz−(0.5mzcos20°)22b22222=105−98.67=35.91mmBP=BN−NP=48.62−35.91=12.71mm2222p=πmcos20°=π×5×cos20°=14.76mmbBP12.712==0.86p14.76b
【题10-28】因0.63pb<0.86pb=B2P
您可能关注的文档
- 郭锡良古代汉语练习1-6答案.doc
- 郭锡良本《古代汉语》练习题答案.doc
- 郭锡良版《古代汉语》练习题及参考答案.pdf
- 鄢景华版自动控制原理习题答案.pdf
- 配套高等教育出版社《经济法》第三版练习题答案.doc
- 重庆中考英语真题及答案(近十年).doc
- 重庆大学《微观经济学》习题与答案.pdf
- 重庆市2015年普法考试题目答案.doc
- 重庆市事业单位考试《管理基础知识》复习题与参考答案.doc
- 重庆邮电大学现代交换原理课后答案二.doc
- 量子力学习题答案.pdf
- 量子力学教程第二版习题答案周世勋著.pdf
- 量子力学教程第二版课后答案,周世勋,陈灏著.pdf
- 金属工艺学习题及部分解答[1].doc
- 金属工艺学课后习题答案(邓文英、郭晓鹏主编).pdf
- 金融企业会计课后习题答案(1) 立信会计出版社 刘学华 主编.doc
- 金融会计第二版郭德松刘海燕(参考答案).doc
- 金融学习题和答案[1].doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看