

- 3.83 MB
- 2022-04-22 11:40:23 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'《电气控制及PLC》专业技能训练题(答案)有答案哦PLC控制(a)一、写出下图所示梯形图的语句表程序。(b)(a)LDI0.1AI0.5=Q0.2LDI0.2=Q0.1LPPOI0.3LDI1.0AI1.2AI0.4LPS=Q0.3OLDAI1.1(b)LDI0.0AI0.5LPPANI0.1OLDAI0.7LDI0.2LPS=Q0.2AI0.3AI0.6AI1.1OI0.4=Q0.1=Q0.3二、使用置位指令复位指令,编写两套程序,控制要求如下:(1)起动时,电动机M1先起动才能起动电动机M2,停止时,电动机M1、M2同时停止。(2)起动时,电动机M1,M2同时起动,停止时,只有在电动机M2停止时,电动机M1才能停止。
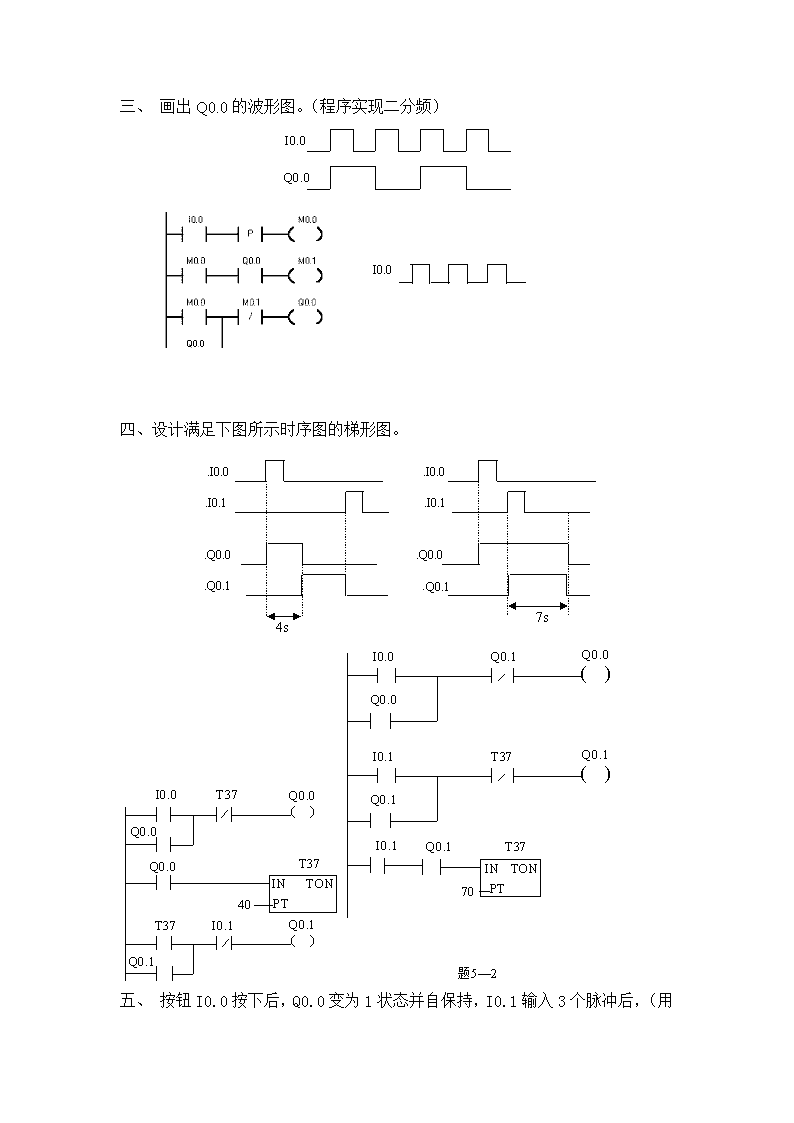
三、画出Q0.0的波形图。(程序实现二分频)I0.0四、设计满足下图所示时序图的梯形图。.I0.0.I0.1.Q0.0.Q0.17s.I0.1.Q0.0.Q0.1.I0.04s五、
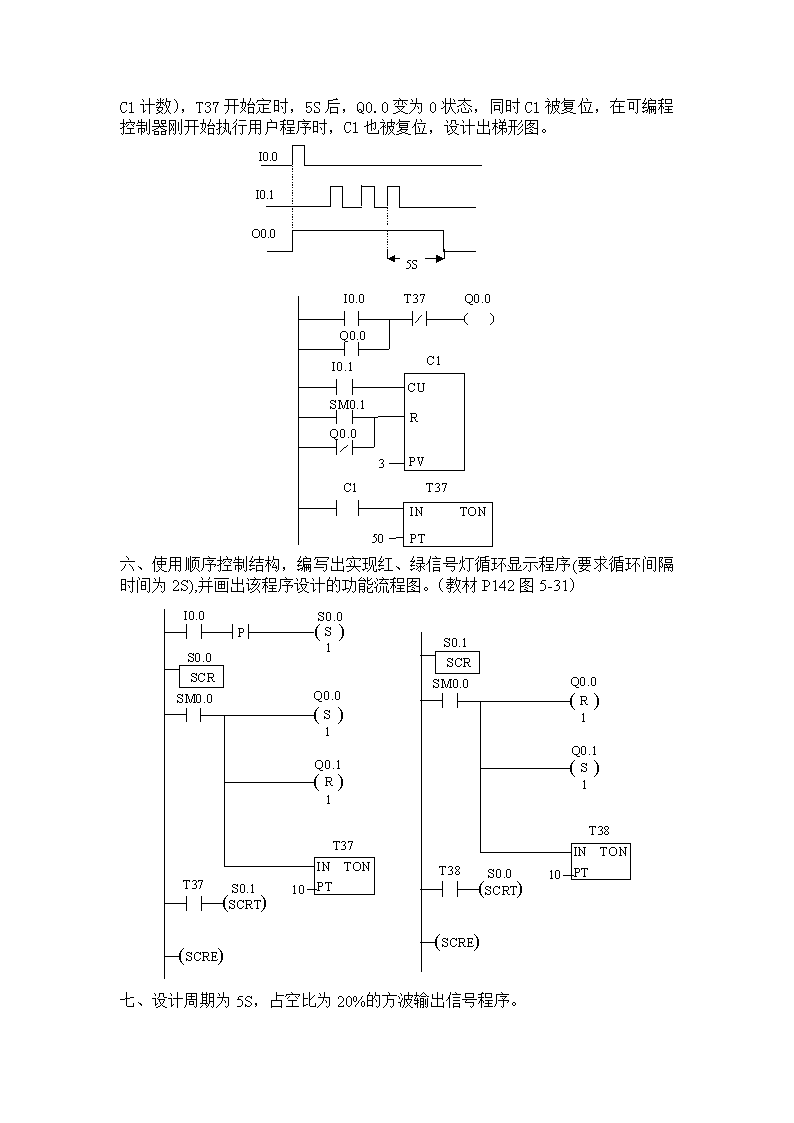
按钮I0.0按下后,Q0.0变为1状态并自保持,I0.1输入3个脉冲后,(用C1计数),T37开始定时,5S后,Q0.0变为0状态,同时C1被复位,在可编程控制器刚开始执行用户程序时,C1也被复位,设计出梯形图。I0.0I0.1Q0.05S六、使用顺序控制结构,编写出实现红、绿信号灯循环显示程序(要求循环间隔时间为2S),并画出该程序设计的功能流程图。(教材P142图5-31)七、设计周期为5S,占空比为20%的方波输出信号程序。
Network1LDI0.0ANT38TONT37,40Network2LDT37TONT38,10=Q0.0
八、设计起动、停止和保持电路。要求:(1)画出PLC外部接线图;(2)写出梯形图语句。九、一台三相异步电动机采用可编程控制器(S7—200CPU224)实现正反转控制。要求:(1)画出PLC的外部接线图;(2)编写梯形图程序(或语句表)。正向启动I0.0反向启动I0.1停止I0.2正向输出Q0.0反向输出Q0.1
十、四组智力抢答器。控制要求如下:Network1//NetworkTitle//首次扫描时将位存储区M0.1---M0.4复位LDSM0.1RM0.1,4Network2//第一组抢答时M0.1接通LDI0.1OM0.1ANM0.2ANM0.3ANM0.4ANI0.0=M0.1Network3//第二组抢答时M0.2接通LDI0.2OM0.2ANM0.1ANM0.3ANM0.4ANI0.0=M0.2Network4//第三组抢答时M0.3接通LDI0.3OM0.3ANM0.1ANM0.2ANM0.4ANI0.0=M0.3Network5//第四组抢答时M0.4接通LDI0.4OM0.4ANM0.1ANM0.2ANM0.3ANI0.0=M0.4Network6//有抢答按钮被按下时蜂鸣器响2秒LDM0.1OM0.2OM0.3OM0.4LPSANT37=Q1.0LPPTONT37,20Network7//NetworkTitle//若第一组抢答按钮被按下则SEG指令将十六进制数1输出,数码管b段和c段被点亮显示1LDM0.1SEG16#1,QB0Network8//NetworkTitle//若第二组抢答按钮被按下则SEG指令将十六进制数2输出,数码管a段、b段、d段、e段和g段被点亮显示2LDM0.2SEG16#02,QB0Network9//NetworkTitle//若第三组抢答按钮被按下则SEG指令将十六进制数3输出,数码管a段、b段、c段、d段和g段被点亮显示3LDM0.3SEG16#03,QB0Network10//NetworkTitle//若第四组抢答按钮被按下则SEG指令将十六进制数4输出,数码管b段、c段、f段和g段被点亮显示4LDM0.4SEG16#04,QB0Network11//按下复位按钮后将输出寄存器清零LDI0.0MOVB16#0,QB0
十一、运用算术运算指令完成下列算式的运算。P143第6题1、[(100+200)×10]/3;2、6的7.8次方;3、sin650的函数值。1、LDI0.1MOVW+100,VW0+I+200,VW0MOVWVW0,VW2*I+10,VW2MOVWVW2,VW4/I+3,VW42、LDI0.1LN6.0,VD10MOVRVD10,VD14*R7.8,VD14EXPVD14,VD183、LDI0.1MOVR3.14159,VD0/R180.0,VD0MOVR65.0,VD4*RVD0,VD4SINVD4,VD8十二、用逻辑操作指令编写一段数据处理程序,将累加器AC0与VW100存储单元数据进行逻辑与操作,并将运算结果存入累加器AC0。LDI0.2ANDWVW100,AC0十三、编写一段程序,将VB100开始的50个字的数据传送到VB1000开始的存储区。LDI0.2BMBVB100,VB1000,100十四、单按钮单路输出控制要求:一个按钮控制一盏灯,实现奇数次亮,偶数次灭。Network1//网络标题//网络注释LDI0.1EULDSM0.1CTUC0,30000Network2LDI0.1MOVWC0,VW100AENOMOVWVW100,VW22DIV2,VD20Network3LDW=VW20,1=M0.0Network4LDM0.0=Q0.0
十五、用数据类型转换指令实现100英寸转换成厘米。LDI0.1
ITD100,VD0DTRVD0,VD4MOVRVD4,VD8*R2.54,VD8ROUNDVD8,VD12十六、单按钮双路单双通控制。要求:使用一个按钮控制两盏灯,第一次按下时第一盏灯亮,第二盏灯灭;第二次按下时第一盏灯灭,第二盏灯亮;第三次按下时两盏灯都亮;第四次按下时两盏灯都灭。按钮信号I0.0,第一盏灯信号Q0.0,第二盏灯信号Q0.1。Network1//网络标题//网络注释LDI0.1EULDC0OSM0.1CTUC0,5Network2LDW=C0,1=M0.1Network3LDW=C0,2=M0.2Network4LDW=C0,3=M0.3Network5LDW=C0,4=M0.4Network6LDM0.1OM0.3ANM0.2ANM0.4=Q0.0Network7LDM0.2OM0.3ANM0.1ANM0.4=Q0.1
十七、编程实现增减计数输出,从0~F变化(输出数码管显示)。Network1//网络标题//网络注释LDSM0.1MOVB5,VB100Network2LDI0.0EUINCBVB100Network3LDI0.1EUDECBVB100Network4LDBVB100,16#fMOVB0,VB100Network5LDI0.0EULDI0.1EUOLDSEGVB100,QB0Network6
十八、编程实现彩灯的循环显示Network1//NetworkTitle//NetworkCommentLDSM0.1MOVB16#1,QB0Network2LDI0.0ANT37TONT37,20Network3LDT37AI0.1RLBQB0,1Network4LDT37ANI0.1RRBQB0,1
十九、编程实现QB0按二进制递增输出0至255之间的数据
Network1//网络标题//网络注释LDI0.0OSM0.1MOVB0,QB0Network2LDSM0.5EUINCBQB0
二十、霓虹灯控制:有8盏指示灯,L1~L9编程实现先从中间L4,L5开始点亮,然后每隔一秒依次向两边扩散点亮直至所有的灯都点亮,之后再从L1,L9开始熄灭,并每隔一秒向内扩散熄灭直至全部熄灭,然后再以相同的方式循环点亮、熄灭。Network1//网络标题//网络注释LDI0.0EUMOVB2#11000,QB0SS0.7,1Network2LSCRS0.7Network3LDSM0.0MOVB0,QB0Network4LDSM0.0TONT44,2Network5LDT44SCRTS0.0Network6SCRENetwork7LSCRS0.0Network8LDSM0.0MOVB2#11000,QB0Network9LDSM0.0TONT37,2Network10LDT37SCRTS0.1Network11SCRENetwork12LSCRS0.1Network13LDSM0.0MOVB2#111100,QB0Network14LDSM0.0TONT38,2Network15LDT38SCRTS0.2Network16SCRENetwork17LSCRS0.2Network18LDSM0.0MOVB2#1111110,QB0Network19LDSM0.0TONT39,2Network20LDT39SCRTS0.3Network21SCRENetwork22LSCRS0.3Network23LDSM0.0MOVB2#11111111,QB0Network24LDSM0.0TONT40,2Network25LDT40SCRTS0.4Network26SCRENetwork27LSCRS0.4Network28LDSM0.0MOVB2#1111110,QB0Network29LDSM0.0TONT41,2Network30LDT41SCRTS0.5Network31SCRENetwork32LSCRS0.5Network33LDSM0.0MOVB2#111100,QB0Network34LDSM0.0TONT42,2Network35LDT42SCRTS0.6Network36SCRENetwork37
LSCRS0.6Network38LDSM0.0MOVB2#11000,QB0Network39LDSM0.0TONT43,2Network40LDT43SCRTS0.7
习题1.接触器的线圈额定电流和额定电压与接触器的额定电流和接触器的额定电压有何区别?答:线圈的额定电压标注在线包上,与是控制回路的电压一致,其额定电流为额定电压下流过线圈的电流,而额定电压标注在铭牌上,与主回路的电压一致,其额定电流大于主回路电流。2.在什么情况下中间继电器可以取代接触器启动电动机?答:在控制小功率、轻负载电动机的电路中3.电动机的启动电流很大,当电动机启动时,热继电器会不会动作?为什么?答:正常情况下不会动作,因为电动机启动的时间比较短,其电流产生的热效应不足以使热继电器动作。4.空气式时间继电器如何调节延时时间?JST型时间继电器触头有哪几类?画出他们的图形符号。答:用螺丝刀调节进气孔气隙大小其触头有如下类型5.熔断器为什么一般不用作过载保护?答:熔断器主要用于短路保护和严重过载保护,只有当线路电流达到熔断器熔断短路一定的时间后,熔断器才熔断,而一般的过载电流远远小于熔断电流,熔断器不会熔断,不能起到过载保护的作用。
4.试设计可进行两处操作,对一台电动机实现长动和点动的控制电路。SB3、SB5点动;SB1、SB4长动一处为SB3点动、SB1长动、SB2停止SB2、SB6停止一处为SB5点动、SB4长动、SB6停止5.试设计两台笼型电动机M1、M2的顺序起动/停止的控制电路,要求如下:①M1、M2能循序启动,并能同时或分别停止。②M1启动后M2启动,M1可点动,M2单独停止。①②
SB1、KM1、M1启动,SB2、KM2、M2启动。。。。。。。。。。。。。。SB3停M1,SB4停M2,SB5总停9.某台机床主轴和润滑油泵各由一台电动机带动。要求主轴必须在油泵起动后才能起动,主轴能正/反转并能单独停车,设有短路、失电压及过载保护等。绘出电气控制原理图。5.设计一个控制电路,要求第一台电动机启动10S后,第二台电动机自行起动,运行10s后,第一台电动机停止运行并同时使第三台电动机自行起动,再运行15s后,电动机全部停止运行。
7.画出笼型异步电动机的能耗制动控制电路,要求如下。①用按钮SB2和SB1控制电动机M的起停②按下停止按钮SB1时,应使接触器KM1断电释放,接触器KM2通电运行,进行能耗制动。③制动一段时间后,应使接触器KM2自动断电释放,试用通电延时型和断电延时型继电器个画出一种控制电路。第一种第二种
1.设计一个工作台前进后退控制线路。工作台由电动机M带动,行程开关ST1、ST2、分别装在终点和原点。要求:前进到终点后停顿一下再后退到原点停止;前进过程中能立即后退到原点。(画出主、控制电路,并用文字简单说明)第一种方法第二种方法
测试题1.下列低压电器中可以实现过载保护的有①④①热继电器②速度继电器③接触器④低压断路器⑤时间继电器2.在三相笼式电动机的正反转控制电路中,为了避免主电路的电源两相短路采取的措施是②①自锁②互锁③接触器④热继电器3.在三相笼式异步电动机的Y-△起动控制电路中,电动机定子绕组接为Y型是为了实现电动机的①起动。①降压②升压③增大电流④减小阻抗4.在电动机的连续运转控制中,其控制关键是①的应用。①自锁触点②互锁触点③复合按钮④机械联锁5.以下哪些设备可以作为PLC的输入设备?①③①限位开关②接触器的线圈③按钮④指示灯6.右图为三相笼式异步电动机的正反转控制电路,用文字说明指出图中的错误。主电路没有短路保护——Q与KM1之间需增设熔断器FU;电动机不能反转——KM2与FR之间的连线任意调换两相。没有电气互锁,会引起电源短路——KM1线圈前串联KM2常闭辅助触点,KM2线圈前串联KM1常闭辅助触点。不能实现过载保护——KM1、KM2线圈后应串联FR的常闭触点7.用PLC控制一个工作台运行,其动作程序为:工作台由原位开始前进,到终端后自动停止;在终端停留2min后自动返回原位停止;要求能在前进或后退途中任意位置都能停止或再次起动;电网停电后再来电工作台不会自行运动。请画出主电路、PLC接线图、PLC梯形图。(有必要的保护措施)。
(1)主电动机M1的点动控制若需要检修或调整车床是,要求主动电动机M1点动控制工作原理:合QS点按SB2KM1得电M串R降压启动松开SB2KM1失电M停车(2)主电动机M1的正、反转控制线路正转:合QS按下SB3KM3得电(3)主电动机M1的反接制动控制正向反接制动:正转时KS1(10-12)闭合按下SB1(4)刀架的快速移动和冷却泵控制快速移动:转动刀架手柄压下SQKM5吸合M3得电刀架快速移动冷却泵控制:M2为冷却泵电动机,它的起动和停止通过按钮SB6和SB5控制。(5)监视电路分析通过电流表来监视主电动机绕组的正常工作电流。
(2)照明电路照明灯采用36V的安全电压供电,开关SA控制练习题以下为一些机床基本控制电路原理图,若将其改为PLC控制,试画出相应的控制电路输入输出接线图、梯形图及对应的指令程序。1、两台电动机顺序起动联锁控制电路两台电动机顺序起动联锁控制线路
2.自动限位控制电路自动限位控制电路
自动限位控制电路3.电动机Y-Δ减压起动控制电路电动机Y-Δ降压起动自动控制电路
电动机Y-Δ降压起动自动控制电路4.自动循环控制自动循环控制电路
自动循环控制电路用按钮、继电器、灯泡等设计一个三位抢答器控制电路。
5.能耗制动控制带变压器的桥式整流能耗制动自动控制电路'
您可能关注的文档
- 《高等数学B(三)》强化训练题1-3及解答 2.6元.pdf
- 《高等数学》(下)习题参考答案.doc
- 《高等数学》下册习题参考答案(天津科学技术出版社).doc
- 《高等数学练习题》全部答案.doc
- 《高级日语2》课后练习及答案.pdf
- 《高级财务会计》第2版 练习题答案.docx
- 【人教版】数学必修三《几何概型》课后练习(含答案).doc
- 【侯亚君版本《概率论与数理统计》】1-3章习题解答.doc
- 【整理版】《习题》答案.doc
- 【管理学】《管理运筹学》复习题及参考答案 共(24页).doc
- 【精品】《工程项目管理》复习题及答案.doc
- 差理论与数据处理第6版》费业泰_习题及答案_网上最完整的.doc
- 一、《数学物理方法与计算机仿真》习题解答.pdf
- 一建项目管理历年真题及答案解析04年~13年.doc
- 一级建造师《水利水电工程管理与实务》历年真题与答案(2005—2012年).doc
- 一级建造师《水利水电工程管理与实务》历年真题与答案.doc
- 一级建造师《通信与广电工程》精品试题及标准答案(2009版)第1套.pdf
- 一级建造师考试真题及答案《建设工程法规及相关知识》2008.docx
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明