

- 7.44 MB
- 2022-04-22 11:48:20 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'目录第一章…………………………………………………………………………1第二章…………………………………………………………………………4第三章…………………………………………………………………………21第四章…………………………………………………………………………34第五章…………………………………………………………………………41第六章…………………………………………………………………………47第七章…………………………………………………………………………61-64-
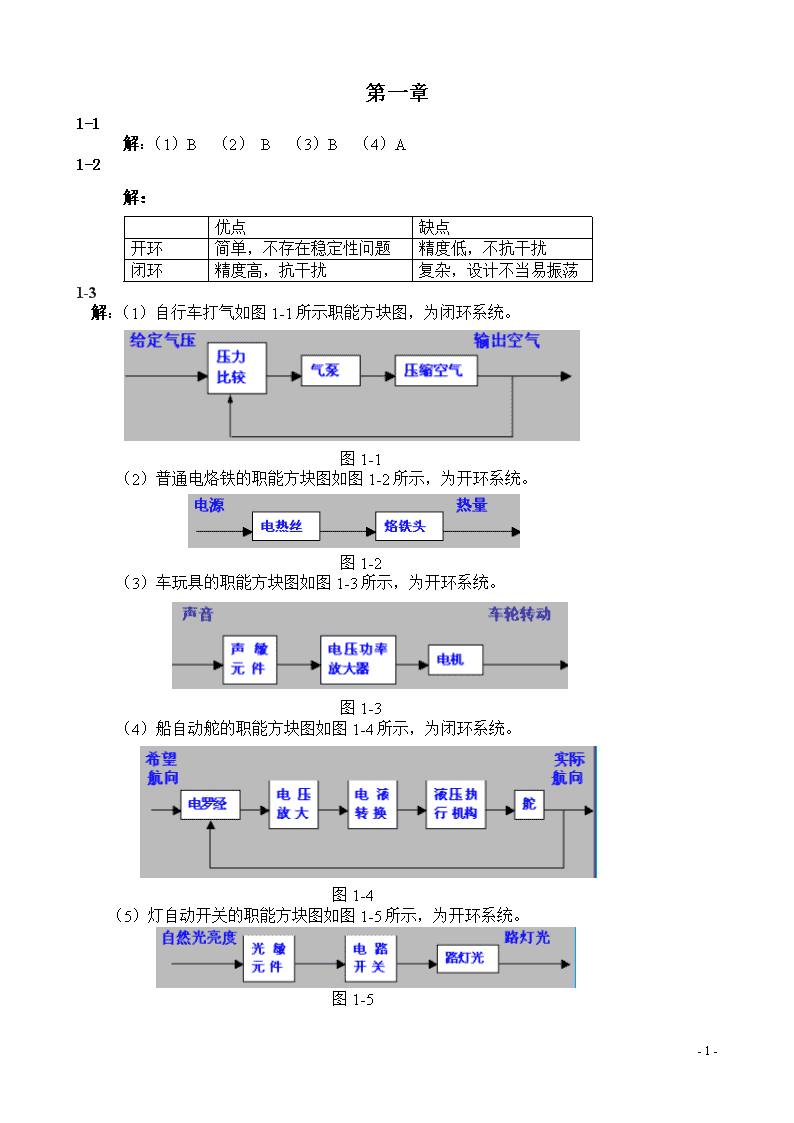
第一章1-1解:(1)B(2)B(3)B(4)A1-2解:优点缺点开环简单,不存在稳定性问题精度低,不抗干扰闭环精度高,抗干扰复杂,设计不当易振荡1-3解:(1)自行车打气如图1-1所示职能方块图,为闭环系统。图1-1(2)普通电烙铁的职能方块图如图1-2所示,为开环系统。图1-2(3)车玩具的职能方块图如图1-3所示,为开环系统。图1-3(4)船自动舵的职能方块图如图1-4所示,为闭环系统。图1-4(5)灯自动开关的职能方块图如图1-5所示,为开环系统。图1-5-64-
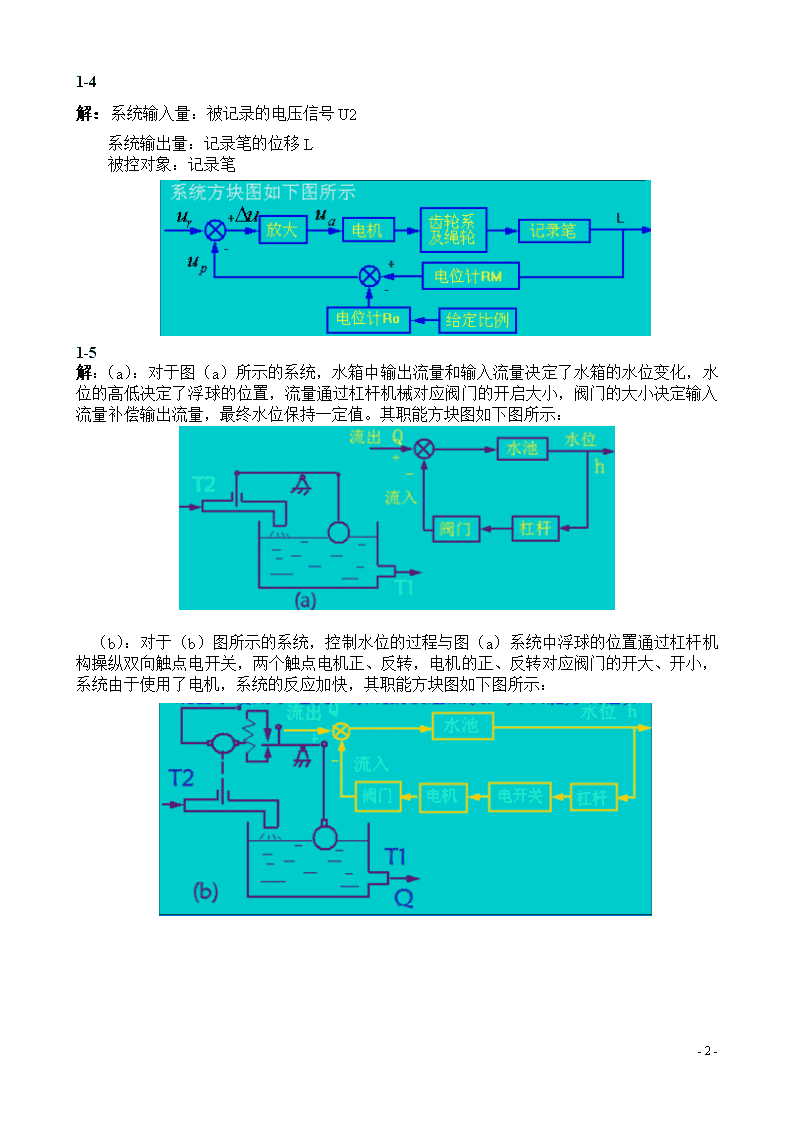
1-4解:系统输入量:被记录的电压信号U2系统输出量:记录笔的位移L被控对象:记录笔1-5解:(a):对于图(a)所示的系统,水箱中输出流量和输入流量决定了水箱的水位变化,水位的高低决定了浮球的位置,流量通过杠杆机械对应阀门的开启大小,阀门的大小决定输入流量补偿输出流量,最终水位保持一定值。其职能方块图如下图所示:(b):对于(b)图所示的系统,控制水位的过程与图(a)系统中浮球的位置通过杠杆机构操纵双向触点电开关,两个触点电机正、反转,电机的正、反转对应阀门的开大、开小,系统由于使用了电机,系统的反应加快,其职能方块图如下图所示:-64-
1-6:试画出实验室用恒温箱职能方块图。解:根据一般实验室用恒温箱的工作原理图,画出其职能方块图如下:(注:1-5中有部分文学是根据上下文理解的,因为原版中缺失;1-6为类似书中原体,不是原体,请注意!)-64-
第二章2-1解:(1):(2):(3):(4):(5):(6):(7):(8):2-2解:(1):(2):(3):(4):-64-
(5):(6):(7):2-3解:(1)对原方程取拉氏变换,得:将初始条件代入,得:取拉氏反变换,得:(2)当t=0时,将初始条件代入方程,得:50+100x(0)=300则x(0)=2.5对原方程取拉氏变换,得:sx(s)-x(0)+100x(s)=300/s将x(0)=2.5代入,得:取拉氏反变换,得:2-4解:该曲线表示的函数为:-64-
则其拉氏变换为:2-5解:将上式拉氏变换,得:又当2-6解:(a)传递函数:-64-
(b)传递函数:(c)传递函数:-64-
(d)传递函数:2-7解:通过方块图的变换,系统可等价为下图:-64-
2-8解:2-9解:(a)-64-
(b)(c)(d)-64-
(e)(f)-64-
(g)2-10解:(a)(b)-64-
(c)2-11解:(a)(b)-64-
(c)(d)2-12解:(a)-64-
(b)-64-
2-13解:(a)(b)-64-
2-14解:2-15解:(1)(2)-64-
2-16解:2-17解:-64-
2-18解:以题可画出方块图如下:2-19解:2-20解:-64-
2-21解:(1)(2、3、4)缺2-22以后缺-64-
第三章3-1解:3-23-3解:-64-
3-4解:-64-
3-53-6解:-64-
3-7解:-64-
3-8解:-64-
3-9解:3-103-11-64-
3-12解:3-13解:-64-
3-14解:3-153-16-64-
3-17解:3-18-64-
3-19解:3-20解:-64-
3-21解:3-22解:-64-
3-23解:3-243-25解:-64-
3-26、3-27缺3-28解:3-29、3-30缺3-31解:3-32、3-33缺-64-
第四章4-1解:4-2解:-64-
4-3解:4-4解:-64-
4-5解:4-6解:(a)-64-
(b)(c)(d)(e)4-7-64-
4-8、4-9缺4-10解:4-11解:-64-
4-12解:4-13、4-14、4-15缺-64-
4-16解:4-17缺4-18解:4-19、4-20、4-21缺-64-
第五章5-15-2、5-3、5-4缺5-5-64-
5-6缺5-75-85-9、5-10缺-64-
5-115-125-13缺-64-
5-145-15缺5-16解:5-17缺5-18解:-64-
5-19解:5-20解:5-21、5-22、5-23、5-24缺5-25解:5-26缺附题:设单位反馈的开环传递函数为试用乃氏判据确定该系统在K=1和K=10时的稳定性。-64-
-64-
第六章6-1解:(1)(2)-64-
(3)-64-
(4)=06-2解:(1)-64-
(2)6-3解:-64-
6-4解:-64-
6-5解:-64-
6-6解:(a)(b)-64-
6-7解:-64-
6-8解:(1)(2)6-9解:(1)-64-
(2)6-10解:-64-
6-11解:(1)(2)6-12解:-64-
6-13解:6-14解:由于系统不稳定,因此系统误差为无穷大。-64-
6-15解:6-16缺6-17解:(1)-64-
6-18解:6-19缺6-20解:-64-
第七章7-1-64-
7-27-3-64-
系统稳定7-4-64-
7-5解:7-6-7-20缺《控制工程基础》习题集配套光盘ISBN7-89494-146-8光盘内容:《控制工程基础》教材的习题及其解答面向用户:主修或自学《控制工程基础》的用户计算机硬件要求:CPU:PII266内存:64M硬盘:4G显示器:256色制作人:许振丰指导老师:董景新(教授)技术支持电话:010-62778140E-mail:xuzf98@mails.tsinghua.edu.cn20036-64-'
您可能关注的文档
- 投资学习题及答案6[1].4投资复习必备.doc
- 投资银行学课后练习题(5-12章)参考答案(2012.12.26).doc
- 护理三基训练考试题集(附答案).docx
- 报关员考试实用报关英语全真试题及答案_3.doc
- 报检实务(第二版)课后习题答案 (2).doc
- 拉氏变换习题解答.pdf
- 指导书1-7章部分习题解答.doc
- 探索-生命课后答案.docx
- 接口与通信习题答案.doc
- 控制工程基础第三版习题答案_清华大学出版社.doc
- 控制工程基础第三版习题答案_清华大学出版社董景新.doc
- 摄影技术 课后习题及答案 第4-6章.doc
- 摘桃解决问题的策略教学设计10.28.docx
- 操作系统教程习题答案.doc
- 操作系统概念第七版习题答案(中文版)完整版.doc
- 操作系统练习题答案.doc
- 操作系统课后习题答案4.doc
- 操作系统课后题答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明