

- 1.22 MB
- 2022-04-22 11:17:43 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
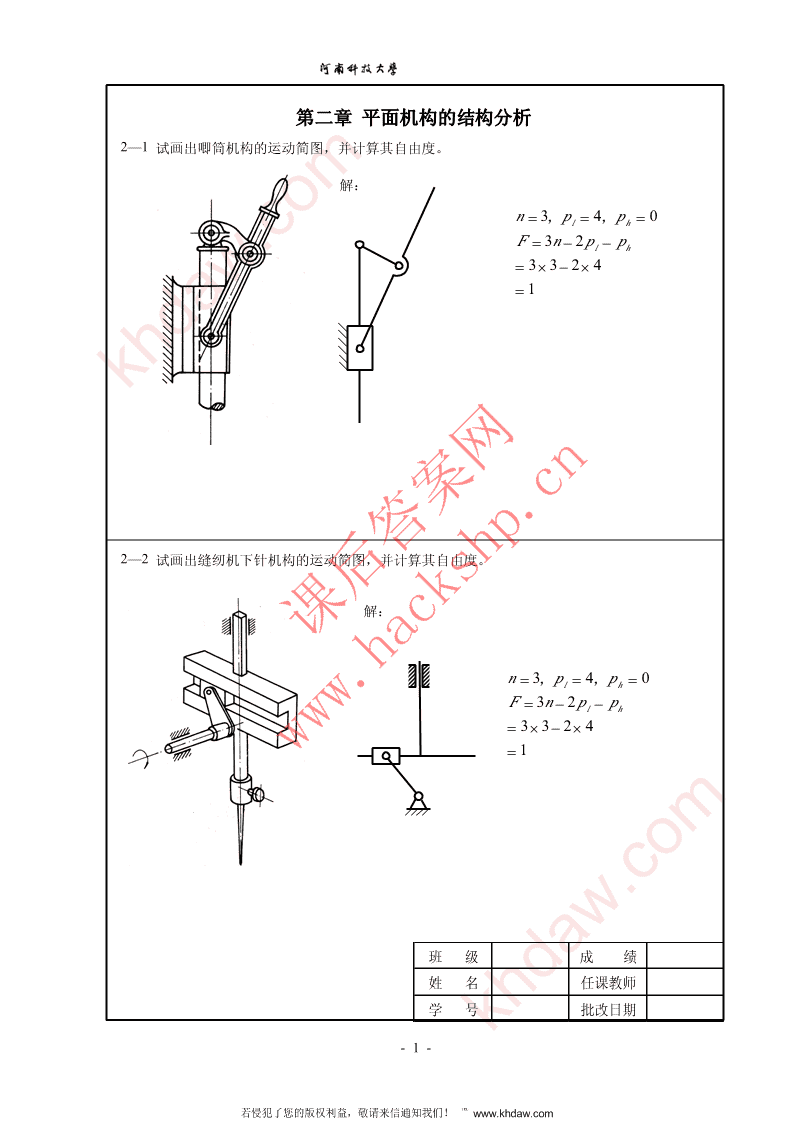
'机械原理作业集第二章平面机构的结构分析2—1试画出唧筒机构的运动简图,并计算其自由度。解:n=3,p=4,p=0lhF=3n−2p−plh=3×3−2×4=1khdaw.com2—2试画出缝纫机下针机构的运动简图,并计算其自由度。解:课后答案网n=3,p=4,p=0lhF=3n−2p−plhwww.hackshp.cn=3×3−2×4=1班级成绩姓名任课教师学号khdaw.com批改日期-1-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
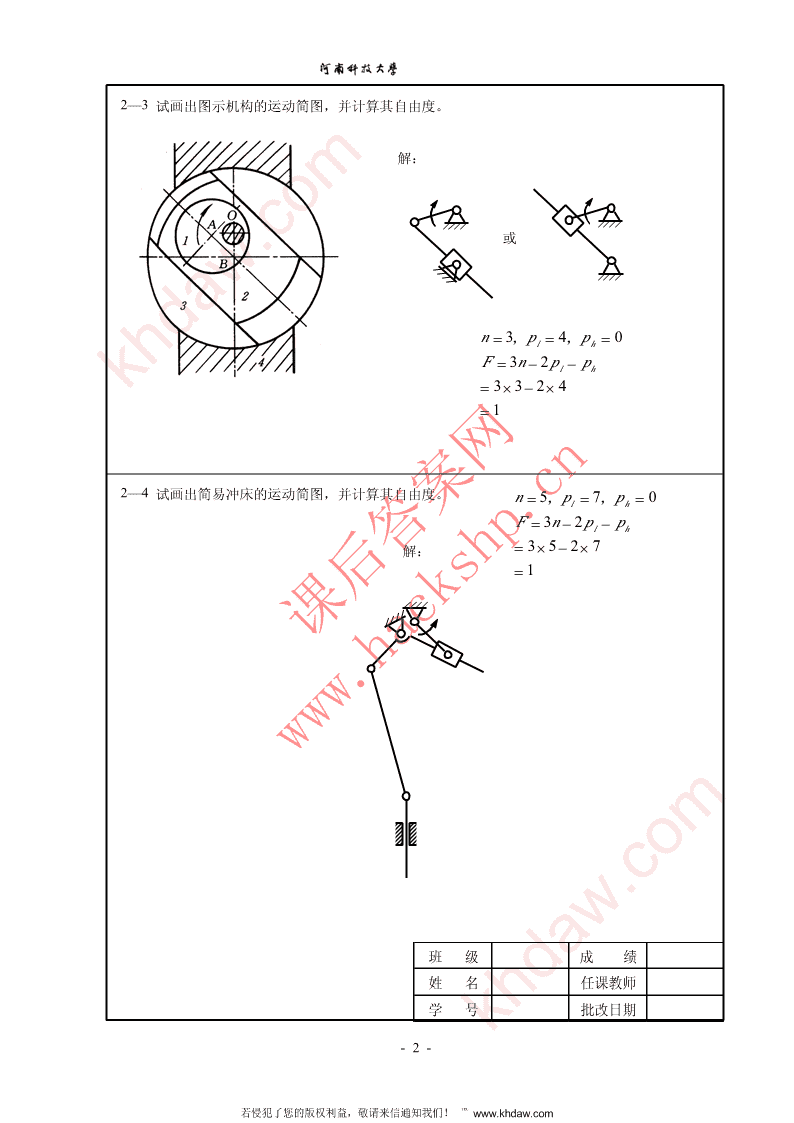
机械原理作业集2—3试画出图示机构的运动简图,并计算其自由度。解:或n=3,p=4,p=0lhF=3n−2p−pkhdaw.comlh=3×3−2×4=12—4试画出简易冲床的运动简图,并计算其自由度。n=5,p=7,p=0lhF=3n−2p−plh解:=3×5−2×7=1课后答案网www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-2-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
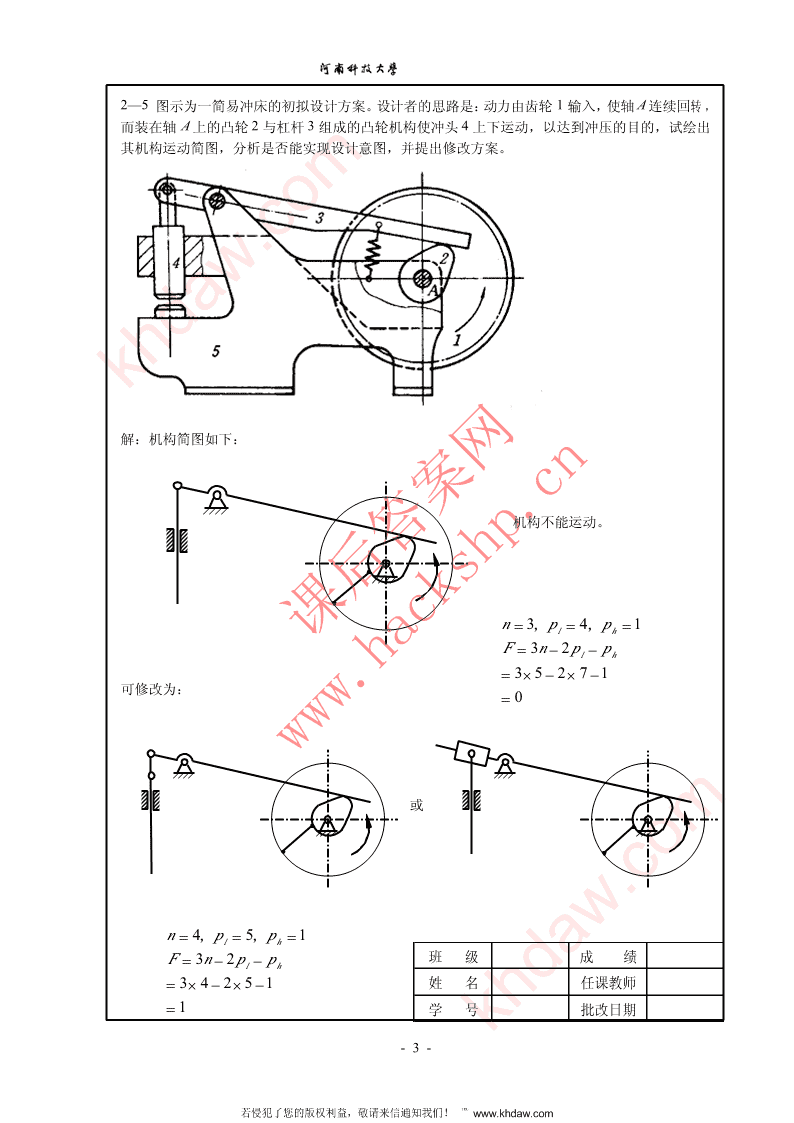
机械原理作业集2—5图示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮1输入,使轴A连续回转,而装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的,试绘出其机构运动简图,分析是否能实现设计意图,并提出修改方案。khdaw.com解:机构简图如下:机构不能运动。n=3,p=4,p=1课后答案网lhF=3n−2p−plh=3×5−2×7−1可修改为:=0www.hackshp.cn或n=4,p=5,p=1lhF=3n−2p−p班级成绩lh=3×4−2×5−1姓名任课教师=1学号khdaw.com批改日期-3-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集2—6计算图示自动送料剪床机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。EDDE=CF=HG解1:C、F为复合铰链,I为局部自由度,EFGC为虚约束。FCn=12,p=17,p=1,F′=1,p′=1BlhF=3n−2p−p−F′+p′AlhI=3×12−2×17−1−1+1GH=1J解2:C为复合铰链,I为局部自由度(焊死),KEFGC为虚约束(去掉)。Nn=8,p=11,p=1khdaw.comlhF=3n−2p−plh=3×8−2×11−1=12—7计算图示机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。说明该机构具有确定运动的条件。解1:C为复合铰链,F、I为局部自由度。Dn=10,p=12,p=3,F′=2,p′=0lhF=3n−2p−p−F′+p′F课后答案网BlhGAC=3×10−2×12−3−2=1J解2:C为复合铰链,F、I为局部自由度(焊死)。Hwww.hackshp.cnEIn=8,pl=10,ph=3F=3n−2p−plh=3×8−2×10−3=1机构具有确定运动的条件是:F=原动件数,即取1个原动件。班级成绩姓名任课教师学号khdaw.com批改日期-4-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集2—8计算图示机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。说明该机构具有确定运动的条件。解1:A、B为复合铰链,B′为虚约束(重复部分)。Bn=6,p=7,p=2lhF=3n−2p−plhAC=3×6−2×7−2=2B′khdaw.com机构具有确定运动的条件是:F=原动件数,即取2个原动件。2—9计算图示机构的自由度,并分析组成此机构的基本杆组,确定机构的级别。B解:n=7,p=10,p=0lh21F=3n−2p−plhPRPII级杆组4C课后答案网A=3×7−2×10=1835D6ERRPII级杆组www.hackshp.cn7RPRII级杆组机构由3个ΙΙ级杆组组成,为II级机构。班级成绩姓名任课教师2学号khdaw.com批改日期1-5-384若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com567
机械原理作业集2—10计算图示机构的自由度,并分析组成此机构的基本杆组,确定机构的级别。如在该机构中改选EG为原动件,试问划分的基本杆组及机构的级别与前者有何不同?D3解:n=7,pl=10,ph=0CF=3n−2pl−ph2=3×7−2×10B4=11H7E5RRPII级杆组3AF682Gkhdaw.com714分解为:6RRRII级杆组RRPII级杆组5机构由3个ΙΙ级杆组组成,为II级机构。D3解:C2B课后答案网4H71EIII级杆组3AF568www.hackshp.cn2G4716分解为:5RRPII级杆组机构由1个ΙΙ级杆组、1个ΙΙ级杆组组成,为III级机构。班级成绩姓名任课教师学号khdaw.com批改日期-6-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集2—11计算图示机构的自由度,将其中的高副用低副代替,并分析机构所含的基本杆组,确定机+解:F3D3CDC624245+BGBEE511khdaw.comAA构的级别。低代前:低代后:构件2、3、4、6为III级杆组,机构为III级机构。2—12计算图示机构的自由度,将其中的高副用低副代替,并分析机构所含的基本杆组,确定机构的级别。解:D3课后答案网34E455Cn=4,p=5,p1=1n=5,p=7,p=60lhlhF=3n2−2p−p2F=3n−2p−plhlhA1=3×4−2×5−1www.hackshp.cn=3×5−2×7−0=1B=1A低代前:n=4,p=5,p=1低代后:n=5,pl=7,ph=0lhF=3n−2p−pF=3n−2p−plhlh=3×4−2×5−1=3×5−2×7=1=1构件2、3、4、6为III级杆组,机构为III级机构。班级成绩姓名任课教师学号khdaw.com批改日期-7-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集2—13计算图示机构的自由度,将其中的高副用低副代替,并分析机构所含的基本杆组,确定机构的级别。解:DDEECCFFBBGGkhdaw.comHHJJKKIIAAn=8,p=11,p=1低代前:lh低代后:n=9,p=13,p=0lhF=3n−2p−plhF=3n−2p−plh=3×8−2×11−1=3×9−2×13=1=1划分杆组如下:机构由课后答案网4个ΙΙ级杆组组成,为II级机构。DECRRRII级杆组www.hackshp.cnRRPII级杆组FRRRII级杆组GBHJKIRRRII级杆组班级成绩A姓名任课教师学号khdaw.com批改日期-8-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集第三章平面机构的运动分析3—1试求下列各机构在图示位置时全部瞬心的位置(用符号Pij直接标注在图上)。P、PB1224P、PP31213223BC24C1∞P2331P34PP、P∞143413P24ADAPkhdaw.com144(a)RRRII级杆组(b)∞∞P23P12p13P2PP24AP141B24232BP1213∞P343AP144CP课后答案网13CP34(c)4(d)www.hackshp.cnP24BPC34231PP23132ACvMP124P12∞3BP23P13M(f)1P14班级成绩姓名任课教师A学号批改日期(e)khdaw.com-9-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集3—2在图示的四杆机构中,已知lAB=60mm,lCD=90mm,lAD=lBC=120mm,ω1=10rad/s,试用瞬心法求:(1)当φ=165°时,点C的速度vC;(2)当φ=165°时,构件2的BC线(或其延长线)上速度最小的点E的位置及速度的大小;(3)当vC=0时,φ角之值(有两个解),并做出相应的机构位置图。EC2P23CCkhdaw.com213P12ω1�B2Bϕ=165P�341ϕ2=26DAP14�ϕ1=2274mµ=0.002lmmB1P24课后答案网解:ω1P12P24117.75ω=P12P14ω=30×10=.2548rad/s==21ω2P12P1430P12P24117.75(1)v=ωCP=.2548×78.985×.0002=.040m/sC224www.hackshp.cn(2)v=ωECP=.2548×70.62×.0002=.036m/sE224(3)当v=0时,A、B、C三点共线,对应有两个极限位置,如图所示:CAB1C1Dϕ1=227°AB2C2Dϕ2=26°班级成绩姓名任课教师学号khdaw.com批改日期-10-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集ω13—3在图示的齿轮—连杆组合机构中,试用速度瞬心法求齿轮1与齿轮3的传动比。ω3ωPP11336=ω3P13P16C2P12P4235BP136P163DAP136khdaw.com3—4下列图示机构中,已知vB,试用相对运动图解法求C点的速度vC(在pb的基础上作速度多边形并列出有关速度矢量方程)。FEABDAvBBvC课后答案网BDECFG(b)(a)epdwww.hackshp.cncbpcbd解:解:vD=vB+vDBvE=vB+vEBvD=vB+vDB方向⊥EF⊥AB⊥EB⊥DF⊥AB⊥DB方向⊥ED⊥AB⊥DB大小?�??�?大小?�?用速度影像原理求得c点,v=pcµvC=vE+vCE=vD+vCDCv方向?�⊥CE�⊥CD班级成绩大小?�?�?姓名任课教师vC=pcµv学号khdaw.com批改日期-11-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集3—5在图示干草压缩机中,已知ω1=5rad/s,lAB=150mm,lBC=600mm,lCE=300mm,lCD=460mm,lEF=600mm,xD=600mm,yD=500mm,yF=600mm,φ1=30°,求活塞5的速度v5和加速度a5。(矢量方程及必要的分析计算):CF53解:1.速度分析D6v=v+vCBCB4E方向⊥CD⊥AB⊥CBFy2大小?ωl?D1AByω1BvB=ω1lAB=5×0.15=0.75m/sAϕ1ceCE11利用速度影像原理求得e点==khdaw.comxDcbCB2v=v+vmFEFEµ=.002lmm方向水平�⊥FE大小?�?vF=pfµv=146.×.002=.0292m/spv37.88×.002fω=CB==.126rad/s()2−3l600×10BCv44.63×.002ω=CD==.194rad/s()3−3l460×10CDvFE39.22×.002ω===.131rad/s()4−3l600×10bFE2.加速度分析nτnτce课后答案网aC+aC=aB+aCB+aCB方向C→D⊥CDB→AC→B⊥BCµ=.002m/s大小ω32lCD?ω12lABω22lSC?vmm222a=ωl=5×.015=.375m/sB1ABn222a=ωl=.126×6.0=.095m/swww.hackshp.cnCB2BCn222a=ωl=.131×6.0=.103m/sFE4FEp′f′n222a=ωl=.194×.046=.173m/sC3CDc′′′利用加速度影像原理求得e′点,ce′′=CE=1c′b′CB2nτb′e′aF=aE+aFE+aFEcf′′方向水平�F→E⊥FEc′′大小?�ω42lEF?a=a=pf′′µ=1.7×1.0=.071m/s2班级成绩5Fa姓名任课教师学号khdaw.com批改日期-12-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集2m/sµ=1.0amm3—6已知铰链四杆机构的位置及尺寸如图(a)所示,现已作出其速度多边形图(b)和加速度多边形(c)。试在图中求出:(1)构件1、2、3上速度为vx的点X1、X2、X3的位置;(2)构件2上速度为零的点M2的位置,并在加速度多边形图(c)上找出点m′2;(3)构件2上加速度为零的点Q2的位置,并在速度多边形图(b)上找出点q2。M2X2khdaw.comBω1�45X1AQD2X3课后答案网(a)Cc′′′www.hackshp.cnc′pcm′2qp′2c′′(x、x、x)b123b′(c)(b)班级成绩姓名任课教师学号khdaw.com批改日期-13-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集k3—7在下列图示的各机构中,是否存在哥氏加速度?在有哥氏加速度的机构图上标出aB3B2的方向,并写出其大小的表达式。kaB3B2kBaB3B2B22存在k存在3aB3B2=2ω2vB3B21ka=2ωv13B3B22B3B2CωA3Aω1C44khdaw.com(a)(b)ω1AB21不存在1B不存在23ω1C3AC4(c)4(d)3—8在图示的机构中,已知各杆的尺寸,课后答案网ω1=常数。试用图解法求机构在图示位置构件3上C点的速度v和加速度a。C3C3(画出机构的速度、加速度多边形,标出全部影像点,并列出必要的矢量方程式及计算式。)Cµvpω231www.hackshp.cnA1Dc3B4b′µ3lb2b1b3(矢量方程及必要的分析计算):解:vB3=vB2+vB3B2方向⊥BD⊥AB∥BCk′b3′′大小?ω1lAB?b′2b1′p′c3′利用速度影像原理求得c3点,vC3=pc3µvµanτkr班级成绩aB3+aB3=aB2+aB3B2+aB3B2姓名任课教师方向B→D⊥BDB→A⊥BC∥BC大小�?��?学号khdaw.com批改日期aC3=pc3′′µa-14-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集利用加速度影像原理求得c3′点,3—9在图示曲柄摇块机构中,已知lAB=30mm,lAC=100mm,lDE=40mm,lBD=50mm,φ1=45°,等角速度ω1=10rad/s,求点E的速度vE和加速度aE以及构件3的角速度ω3和角加速度α3。(矢量方程及必要的分析计算):BD2C3145�A解:1.速度分析�ω1904vC2=vB+vC2B=vC3+vC2C3Emµ=.0002lmm方向?⊥AB⊥CB∥CBbb12大小?ω1lAB?0?khdaw.comv=ωl=10×.003=3.0m/seB1ABv=bcµ=41.1×0.006=0.25m/sm/sµ=.0006C2B22vvmmv411.×.0006C2Bω===2rad/s=ω()c233l62×.0002BCpvC2C3=c3c2µv=28.17×0006.=0.17m/sc2p′利用速度影像原理求得e点,ve=peµv=29.51×0006.=0.177m/snτkraC2=aB+aC2B+aC2B=aC3+aC2C3+aC2C3方向?B→AC→B⊥CB⊥CB∥CB大小?��?0�?k′a=ω2l=102×0.03=课后答案网3m/s2c′B1AB2222a=ωl=2×62×.0002=.0496m/sC2B2CB2e′m/sµ=.003awww.hackshp.cnmmc′′2b1′b′2k2aC2C3=2ω2vC2C3=2×2×0.017=0.68m/s利用加速度影像原理求得e′点,2aE=pe′′µa=94.66×.003=.284m/sτaC2B33.15×.0032α2===.802rad/s()lCB62×.0002班级成绩姓名任课教师学号khdaw.com批改日期-15-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集3—10已知图示机构的位置及尺寸,ω1=常数,用相对运动图解法求构件3的角速度ω3和加角速度α3。(画出机构的速度、加速度多边形,并列出必要的矢量方程式及计算式。)(矢量方程及必要的分析计算):41B(B2、B3)2解:1.速度分析4ω1DvB3=vB2+vB3B2方向B→CB→A∥CD大小?ω1lAB?3khdaw.comvB3=pb3µvvkB3vaB3B2ω3==ω2()B3B2lCB)C2.加速度分析µlnτkraB3+aB3=aB2+aB3B2+aB3B2b1b2方向B→C⊥CBB→A⊥CD∥CD大小�?��?τ=′′′课后答案网aB3b3b2µaτaα=B3()b33lCB)pμwww.hackshp.cnvb1′p′b′2b′3b′′3k′班级成绩姓名任课教师μa学号khdaw.com批改日期-16-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集3—11已知图示机构的位置及尺寸,ω1=常数,求构件2上D点的速度vD和加速度aD。(画出机构的速度、加速度多边形,并列出必要的矢量方程式及计算式。)(矢量方程及必要的分析计算):D解:1.速度分析2�BvB2=vB1+vB2B190方向∥BC⊥AB∥AB大小?�?31ωvB2=pb2µv1ω=ωϕ21khdaw.comA1CCvD2=vB2+vDB24方向?�⊥DBµl大小?��pvD=pdµv2.加速度分析krbaB2=aB1+aB2B1+aB2B11方向∥BCB→A⊥AB∥ABd课后答案网大小?��?aB2=pb2′′µab2µvα=α=021b′nτ2aD=aB2+aDB2+aDB2d′www.hackshp.cn方向?�D→B大小?��0aD=p′d′µa=k′班级成绩p′姓名任课教师学号khdaw.com批改日期μab1′-17-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集3—12已知图示机构的位置及尺寸,ω1=常数,试用相对运动图解法求图示位置:(1)构件5上F点的速度vF(在pb的基础上作速度多边形并列出有关矢量方程式及计算式);(2)构件5上F点的加速度aF(写出求解思路并列出有关矢量方程式及计算式);k(3)aD5D4大小的表达式,在机构图上标出其方向。(矢量方程及必要的分析计算):F解:1.速度分析vC=vB+vCBB5ak方向∥AC⊥AB⊥CB2D5D4D大小?�?khdaw.com1ϕω14C3利用速度影像原理求得d(d)点,bd2=BD=1A124bcBC26vD5=vD4+vD5D4方向⊥DE�∥EDE大小?�?pfEF利用速度影像原理求得f点,==2pdEDµvF=pfµv5l2.加速度分析nτaC=aB+aCB+aCB方向∥ACB→AB→C⊥CB课后答案网大小?��?f利用加速度影像原理求得d2′(d4′)点nτkrd5aD5+aD5=aD4+aD5D4+aD5D4pc方向D→E⊥DE�⊥DE∥DEewww.hackshp.cn大小�?��?dd利用加速度影像原理求得f′点24aF=pf′′µakba=2ωvD5D44D5D4µvvD5D4ω4k班级成绩aD5D4姓名任课教师学号khdaw.com批改日期-18-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集3—13在图示的齿轮—连杆组合机构中,ΜΜ为固定齿条,齿轮3的齿数为齿轮4的2倍,设已知原动件1以等角速度ω1顺时针方向回转,试用图解法求机构在图示位置时,E点的速度vE以及齿轮3、4的速度影像。(矢量方程及必要的分析计算):F5解:vC=vB+vCB方向⊥CD⊥AB⊥BC大小?ω1lAB?BEE42H1由速度影像原理求出hAωCC31khdaw.comΔpch∽ΔDCH6DvE=vH+vEHMM方向⊥EF√⊥EHµ大小?�?lvE=peµvhpdcµ课后答案网vebg3www.hackshp.cng4班级成绩姓名任课教师学号khdaw.com批改日期-19-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集3—14在图示机构中,已知ϕ1=45°,构件1以等角速度ω1=100rad/s逆时针方向转动,lAB=400mm,γ=60°,求构件2的角速度ω2和构件3的速度v3。(用解析法)y解:建立图示直角坐标系及封闭式矢量图形θl+s=s2123B分别用单位矢量i、、j点积上式两端2ω1lcosθ+scosθ=sl1s21122313Cl1sinθ1+s2sinθ2=0Aθ1s3x�θ=360−γ2γ4�lcosθ+scos(360−γ)=s1123khdaw.comlsinθ+ssin(360�)=0112分别将以上两式对时间t求导:••�−ω1l1sinθ1+s2cos(360−γ)=s3•�ωlcosθ+s2sin(360−γ)=0111••�−scos(360−γ)+s=−ωlsinθ23111•�−ssin(360−γ)=ωlcosθ2111•−cos(360�−γ)1s2−sinθ1•=ω1l1�cosθ−sin(360−γ)0s1课后答案网3•cosθ1s=−lω211�sin(360−γ)•�s=v=−lω[sinθ+cosθcot(360−γ)]331www.hackshp.cn111����=−4×100[sin45+cos45cot(360−60)=−119.54m/s•d(360�−60�)ω2=θ2==0dt班级成绩姓名任课教师学号khdaw.com批改日期-20-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集第四章平面机构的力分析4—1图示为一机床的矩形—V形导轨副,拖板1与导轨2组成复合移动副。已知拖板1的移动方向垂直纸面,重心在S处,几何尺寸如图所示,各接触面间的摩擦系数为f。试求导轨副的当量摩擦系数f。VAl1l2解:Gl1Gl2F=F=21l+ll+l1212S1fGl22θFf21,1=⋅sinθl+l12Gl1F=f⋅G2f21,2l+l12FF2l2l11Ff21=fG(+)(l+l)sinθl+lkhdaw.com1212ll21f=f(+)V(l+l)sinθl+l12124—2在图示楔块机构中,已知:α=β=600,Q=1000N,各接触面间的摩擦系数f=0.15。Q为生产阻力,试求所需的驱动力F(画出力矢量多边形,用正弦定理求解)。解:摩擦角−1−1��Fϕ=tanf=tan.015=.853=823′v131v21构件2:FR31v23Q+F+F=0FFR12R32R21R32构件1:ϕϕϕ2F+F+F=0课后答案网QR21R31β作力矢量多边形如图,由正弦定理,有:αFR12QFR123=�sin(β−2ϕ)sin(90+ϕ)FR31F=FR2190�−ϕwww.hackshp.cn��sin(180−α−β+2ϕ)sin(90−ϕ)�180−α−β+2ϕF=FR21R12β−2ϕsin(α+β−2ϕ)F得:F=QFR21sin(β−2ϕ)ϕ�FR32FR12sin10265′�=1000α+β−90−ϕsin42�65′=1430NQ�90+ϕ−β班级成绩姓名任课教师学号khdaw.com批改日期-21-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集4—3图示曲柄滑块机构中,设已知机构尺寸,图中虚线圆为摩擦圆,滑块与导路的摩擦角为φ,驱动力为F,阻力矩为M。试在下列各机构位置简图中画出各运动副中反力方向(必须注明力矢量的脚标)。ϕϕFR12FR432ω23v34ϕFFR411R21ωFR233F21R32MFω144ϕϕkhdaw.comωF21R12FR43vϕ342FR213MF1FR41ω14ω234FR23FR32ϕϕFR43ϕv34FR323课后答案网FFR23Mω414F2R41F1R21ω23FR12ϕϕω21www.hackshp.cnFR43vϕ343ωFω1423FR4142FR32M1FR21FR23FR12ω21班级成绩姓名任课教师学号khdaw.com批改日期-22-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集4—4图示为一摆动从动件盘形凸轮机构,凸轮1沿逆时针方向回转,Q为作用在摆杆2上的外载荷,试确定各运动副中的总反力(FR31、FR12、FR32)的方位。图中虚线圆为摩擦圆,摩擦角为φ。解:FϕϕR12ω3232BCv21FFR32R211FR41QAωM113khdaw.com4—5图示偏心圆盘凸机构中,已知各构件的尺寸,作用在从动件上的生产阻力Q,凸轮的惯性力Fi1,运动副B的摩擦角为φ。凸轮以等角速度ω1逆时针方向回转。试求:(1)各运动副中的反力;(2)需加在凸轮轴上的平衡力矩M1(在图上画出各运动副反力,注明脚标,并列出力平衡方程式,画出力矢量多边形,已知力大小按图示长度画。)解:FϕϕR1232Cv课后答案网21FBR32FFR21R31MQ11ωFi113AFR32Fwww.hackshp.cnFR12RFR21h构件2:Q+FR12+FR32=0大小�??方向���构件1:将Fi1与FR21合成:F=F+FRi1R21F=−FR31RM1=FR31⋅h班级成绩姓名任课教师学号khdaw.com批改日期-23-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集4—6在图示机构中,已知驱动力为F,工作阻力矩为Mr,若不计各构件的重量及惯性力,试在机构图中画出各构件的受力。图中虚线圆为摩擦圆,摩擦角为φ。解:ϕϕF2FωR1223F1R31ω13Mr32BC1FvAωM121F3R21Fkhdaw.comR324—7在图示机构中,已知原动件1在驱动力矩Md的作用下等速转动,ω1如图所示。作用在从动件2上的生产阻力为Q,图中虚线圆为摩擦圆,运动副C的摩擦角为φ。试在图上画出各运动副反力(注明脚标),写出构件2的力平衡方程式,并画出力矢量多边形。解:ϕϕQFR32v23ωB212FR21课后答案网CFQR32MdFR12ω1FR1213www.hackshp.cnA4FR31构件2:Q+FR12+FR32=0三力汇交大小�??方向���构件1:F+F=0R21R31大小�?方向�?班级成绩姓名任课教师学号khdaw.com批改日期-24-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集第五章机械的效率和自锁5—1在图示斜面机构中,设已知摩擦面间的摩擦系数f=0.2。求在Q力作用下(反行程)机构的临界自锁条件和在此条件下正行程(在F力作用下)的效率。解:1、反行程FF+Q+FR21=0R21FQFϕα�=sin(90+β−α+ϕ)sin(α−ϕ)cos(β−α+ϕ)�Q=Fβ=45sin(α−ϕ)1cos(β−α)v12Q0=Fsinαkhdaw.comαQ2Q0cos(β−α)sin(α−ϕ)η′==Qsinαcos(β−α+ϕ)自锁条件:η′≤0F�−1�90−β即:α≤ϕ=tan(f)=11.31�或sin(α−ϕ)90+β−α+ϕF=Qcos(β−α+ϕ)Q令F≤0FR21−1�α≤ϕ=tan(f)=11.31α−ϕ2、正行程令ϕ=−ϕ课后答案网cos(β−α−ϕ)Q=Fsin(α+ϕ)cos(β−α)Q=F0sinαQcos(β−α−ϕ)sinαη==www.hackshp.cnQsin(α+ϕ)cos(β−α)0将α=11.31°代入,则:η=.05667班级成绩姓名任课教师学号khdaw.com批改日期-25-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集5—2图示为一焊接用的楔形夹具。利用这个夹具把两块要焊的工件1及1′预先夹妥,以便焊接。图中2为夹具体,3为楔块。试确定此夹具的自锁条件(即当夹紧后,楔块3不会自动松脱出来的条件)。2解1:以3为研究对象,去掉F,反行程受力如图(a),FR23作用在摩擦角内,则自锁,即有:α−ϕ≤ϕ3Fα≤2ϕ解2:如图(a),若自锁,则有:αFsin(α−ϕ)≤Fsinϕ(∗)R23R1311′而由:∑Fy=0有:Fcos(α−ϕ)=FcosϕR23R13cos(α−ϕ)F=FR13R23khdaw.comαcosϕ代入(*),有:vFtan(α−ϕ)≤Ftanϕ32R23R13F3α−ϕ≤ϕR13ϕα≤2ϕαϕ解3:以3为研究对象,反行程受力如图(b),由F平衡条件:R23v31F+FR23+FR13=0(a)FR23F=�sin(90+ϕ)sin(α−2ϕ)α−2ϕ课后答案网sin(α−2ϕ)F=FR23ϕcosϕFR23F自锁,有:F≤0R13F�(b)α≤2ϕwww.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-26-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集5—3在图示夹紧机构中,虚线圆为摩擦圆,φ为摩擦角,试:(1)求出在图示位置欲产生Q=400N的法向预紧力,需要加在手柄上的力F为多少?(2)判断当力F去掉后,该机构是否自锁?为什么?解:Fkhdaw.com1F(反)R21ϕϕF(正)R21FFFR21R312QFR313Q课后答案网NϕϕµF=10mm(1)以构件1为研究对象,有:F+www.hackshp.cnFR21+FR31=0受力如图,量得:F=140N(2)由图可知:FR21作用在摩擦圆内,故自锁。班级成绩姓名任课教师学号khdaw.com批改日期-27-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集5—4在图示的缓冲器中,若已知各楔块接触面间的摩擦系数f及弹簧的压力Q,试求当楔块2、3被等速推开和等速恢复原位时力F的大小、该机构的效率以及此缓冲器正反行程不至发生自锁的条件。解:1、在F作用下,楔块2、3被等速推开(正行程),受力如图。构件1:F+FR21+FR31=0FFR21F=αFsin(α−ϕ)sin(π−2(α−ϕ))FR31R21nnϕsin(α−ϕ)ϕF=FR21v211v31sin2(α−ϕ)nFR12FR13n23构件2:Q+FR12+FR42=0nFR42FR43nQ4QFQvvR122434=�khdaw.comsin(90−(α−ϕ))sin2(α−ϕ)FR24nnFR34cos(α−ϕ)F=QR12sin2(α−ϕ)F=FR12R21F=Qctan(α−ϕ)F=Qctanα0α−ϕFcotαtan(α−ϕ)0η===Fcot(α−ϕ)tanαFR31令η>0正行程不自锁的条件为:α>ϕF2(α−课后答案网ϕ)2、在Q作用下,楔块2、3复原位(反行程)。FR21令:ϕ=−ϕ代入上式,得:FR42FR12F′=Qcot(α+ϕ)α−ϕF′=Qcotα0F′tanαcot(α+ϕ)Qwww.hackshp.cnη′===F′tan(α+ϕ)cotα0令η′>0∵tanα>0�∴0<α+ϕ≤90�反行程不自锁的条件为:α≤90−ϕ�正反行程均不自锁的条件为:ϕ<α<90−ϕ班级成绩姓名任课教师学号khdaw.com批改日期-28-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集5—5图示矩形螺纹千斤顶中,已知螺纹大径d=24mm、小径d1=20mm、螺距p=4mm;顶头环形摩擦面A的外径D=30mm,内径d0=15mm,手柄长度l=300mm,所有摩擦系数均为f=0.1。求该千斤顶的效率η。又若F=100N,求能举起的重量Q为若干?解:−1�ϕ=tan(f)=.571p4螺纹升角:tanα===.00578πd2d+d1π⋅2��α=.33123=381′环形摩擦面的摩擦力矩为:332D−d0M=fQ⋅1223D−d033230−15=1.0×⋅Qkhdaw.com22330−15=.11667Q螺杆上升所需力矩:d2M=Qtan(α+ϕ)22d+d1��=Qtan(.33123+.571)2×2=.17466Q克服Q所需总力矩:M=M+M=.11667Q+.17466Q=.29133Q1课后答案网2d2M=Qtanα=.06366Q02M0η==.02185MMFl100×300Q====102973.N.29133www.hackshp.cn.29133.29133班级成绩姓名任课教师学号khdaw.com批改日期-29-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集5—6图示为一带式运输机,由电动机1经带传动及一个两级齿轮减速器带动运输带8。设已知运输带8所需的曳引力F=5500N,运送速度v=1.2m/s。带传动(包括轴承)的效率η1=0.95,每对齿轮(包括轴承)的效率η2=0.97,运输带8的机械效率η3=0.92。试求该系统的总效率η及电动机所需的功率。解:该系统的总效率为:2η=η⋅η⋅η1232=.095×.097×.092=.08224电动机所需的功率:−3Fv5500×2.1×10P===.8026kWη.08224khdaw.com5—7如图所示,电机通过带传动及圆锥、圆柱齿轮传动带动工作机A和B。设每对齿轮(包括轴承)的效率η1=0.97,带传动(包括轴承)的效率η2=0.92,工作机A、B的功率分别为PA=5KW,PB=1KW,效率分别为ηA=0.8,ηB=0.5,试求传动系统总效率及电动机所需的功率。解1:输入功率:P=P′+P′电ABPA5P′==A22ηηη8.0×.097×.092A12课后答案网=.722kWPB1P′==B22ηηη5.0×.097×.092B12=.231kWP=P′+P′=.722+.231=.953kWwww.hackshp.cn电ABPA+PB5+1η===.06296P.953电解2:P+P5+1ABη′===.07057PP51AB++ηηηη8.0×.0975.0×.097A1B1η=η′⋅η⋅η=.07057×.097×.092=.062912P+P5+1ABP===.953kW电η.0629班级成绩姓名任课教师学号khdaw.com批改日期-30-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集第六章机械的平衡6—1图示为一钢制圆盘,盘厚b=50mm,位置Ⅰ处有一直径φ=50mm的通孔,位置Ⅱ处是一质量m2=0.5kg的重块。为了使圆盘平衡,在r=200mm制一通孔。试求此孔的直径与位置(钢的密度3γ=7.8g/cm)。2φ2π×5−3解1:m1=π()bγ=×8.7×10=.0765kg24W=mr=.0765×10=.765kg⋅cmΙ1Ι�135W=mr=5.0×20=10kg⋅cmΙΙ2ΙΙr=100mm��ΙΙW=−(Wcos45+Wcos210)bxΙΙΙ�=−(.765×.0707−10×.0866)=.325kg⋅cm210��W=−(−Wsin45+Wsin(−30))r=200mmbyΙΙΙΙΙΙΙ=−(−.765×.0707+10×5.0)=10.41kg⋅cm2222W=W+W=.325+10.41=10.904kg⋅cmkhdaw.combbxbyW10.904bm.05452m===.05452kgbbr===.21095cmr20孔πbγπ×5×8.7−1Wby−110.41�θ=tan()=tan()=72.66b0W.325bx�W孔的位置:θb=θb0+π=252.66kg⋅cmΙΙµ=5.0WmmWb解2:图解法WΙ+WΙΙ+Wb=0作图,量得:WθΙb0W=215.×µ=10.75kg⋅cmbWWb10.75θ=θ+π=252.66�mb===.05375kgbb0r206—2图示曲轴结构中,m1=m2=课后答案网m3=m4,r1=r2=r3=r4,l12=l23=l34,各曲拐的位置如图,试判断该曲轴是否达到静平衡?是否达到动平衡?为什么?m3m1r3r4www.hackshp.cnmrr412m2l34l23∵∑Fi=0l12解:∴静平衡∵m2、m3产生的惯性力矩与m1、m4产生的惯性力矩不在同一平面内,∴∑Mi≠0,故该轴动不平衡。班级成绩姓名任课教师学号khdaw.com批改日期-31-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集6—3图示一曲轴,已知两个不平衡质量m=m=m,r=−r,位置如图,试判断该轴是否静1212平衡?是否动平衡?若不平衡,求下列两种情况下在两个平衡基面I、II上需加的平衡质径积mr和mr的大小和方位。bΙbΙbΙΙbΙΙ解:∵∑mr=0静平衡∵∑M≠0动不平衡。若mbIrbI=−mbIIrbII,两者构成一力偶与mr产生的力偶相平衡。r=r1=r2mr⋅2l=mr⋅2lbIbIΙΙΙm1mr=mr=mrbIbIbIIbIImbΙΙ方位如图。rkhdaw.comllllbΙΙr1rr2bΙmbΙm2解:∵∑mr=0静平衡∵∑M≠0动不平衡。若mbIrbI=−mbIIrbII,两者构成一力偶与mr产生的力偶相平衡。mr⋅4l=mr⋅2lbIbI课后答案网ΙΙΙmrm1mbIrbI=mbIIrbII=mbΙΙ2rllllbΙΙwww.hackshp.cnrbΙr1r2mbΙm2班级成绩姓名任课教师学号khdaw.com批改日期-32-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集6—4在图示的转子中,已知各偏心质量m1=10kg,m2=15kg,m3=20kg,m4=10kg,它们的回转半径分别为r1=400mm,r2=r4=300mm,r3=200mm,又已知各偏心质量所在的回转平面的距离为l12=l23=l34=300mm,各偏心质量的方位角如图所示。若置于平衡基面Ⅰ及Ⅱ中的平衡质量mbΙ及mbΙΙ的回转半径分别为500mm,试求mbΙ及mbΙΙ的小和方位。�m1201l12l23l34m1mm4r41r�430�240r3r2mm33m2�m3002解1:ΙΙΙW=mr=10×40=400kg⋅cmW1ΙΙ=01Ι1122115×30W=mr=×15×30=300kg⋅cmW2ΙΙ=m2r2==150kg⋅cm2Ι2233khdaw.com331122×20×20W=mr=×20×20=1333.kg⋅cmW3ΙΙ=m3r3==2667.kg⋅cm3Ι333333W=0W4ΙΙ=m4r4=10×30=300kg⋅cm4Ι���W=−(Wcos120+Wcos240+Wcos300)=283.35kg⋅cmbΙx1Ι2Ι3Ι���W=−(Wsin60−Wsin60+Wsin60=28.87kg⋅cmbΙy1Ι2Ι3Ι2222W=W+W=283.35+28.87=284.82kg⋅cmbΙbΙxbΙyWbΙ284.82−1WbΙy−128.87�m===.569kgθ=tan()=tan()=.5817bΙbΙ5050W283.35bΙx���W=−(−Wcos60+Wcos60+Wcos30)=−318.14kg⋅cmbΙΙx2ΙΙ3ΙΙ4ΙΙ���W=−(−Wsin60课后答案网−Wsin60+Wsin30)=210.84kg⋅cmbΙΙy2ΙΙ3ΙΙ4ΙΙ2222W=W+W=318.14+210.84=381.66kg⋅cmbΙΙbΙΙxbΙΙyWbΙΙ−1WbΙΙy−1210.84��mbΙΙ==.763kgθbΙΙ=tan()=tan()=−33.53+π=146.4750WbΙΙx−318.14www.hackshp.cnkg⋅cm解2:图解法µW=10mmW2ΙΙWbΙΙW2ΙWθ1ΙbΙΙW3ΙΙW3ΙWbΙW4ΙΙθbΙ班级成绩姓名任课教师学号khdaw.com批改日期-33-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集6—5图示带有刀架盘A的机床主轴需要作动平衡试验,现校正平面取Ⅰ、Ⅱ两回转面,但所用的动平衡机只能测量在两支承范围内的校正平面的不平衡量。现测得平面Ⅰ、Ⅲ内应加质径积为m1r1=1gm,m3r3=1.2gm,方向如图所示。能否在Ⅰ、Ⅱ两回转面内校正?如何校正?1000700ΙΙΙΙΙAr3m3θΙm1r1khdaw.comΙΙΙΙΙΙ课后答案网www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-34-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集6—6高速水泵的凸轮轴系由三个互相错开1200的偏心轮所组成,每一偏心轮的质量为0.4kg,其偏心距为12.7mm。设在平衡面A和B处各装一个平衡质量mA和mB使之平衡,其回转半径为10mm,其它尺寸如图所示(单位:mm)。求mA和mB的大小和位置。ADEBDEC757540Ckhdaw.com230kg⋅mmµ=1.0WmmWEBWbB课后答案网WWCBDBθCAθCBWwww.hackshp.cnbAWEAWCAWDA班级成绩姓名任课教师学号khdaw.com批改日期-35-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集6—7图示为一滚筒,在轴上装有带轮。现已测知带轮有一偏心质量m1=1kg;另外,根据该滚筒的结构,知其具有两个偏心质量m2=3kg,m3=4kg,各偏心质量的位置如图所示(长度单位为mm)。若将平衡基面选在滚筒的端面,两平衡基面中平衡质量的回转半径均取为400mm,试求两平衡质量的大小和方位。ΙΙΙmr2=3002m1502�315m3m1503m1m1r=20031501100150200r1=2505.3145.解1:W1Ι=m1r1=79.54kg⋅mmW=mr=329.54kg⋅mm1ΙΙ11khdaw.com11115.15.9W2Ι=m2r2=122.72kg⋅mmW2ΙΙ=m2r2=777.27kg⋅mm11115.95.1W3Ι=m3r3=6909.kg⋅mmW3ΙΙ=m3r3=1091.kg⋅mm1111�W=−(Wcos45)=−488.55kg⋅mmbΙx3Ι�W=−(W+W−Wsin45)=285.64kg⋅cmbΙy1Ι2Ι3Ι22W=W+W=565.93kg⋅mmbΙbΙxbΙyWbΙ−1WbΙy��m==.1414kgθ=tan()=−30.31+π=149.69bΙbΙ400WbΙx�W=−(Wcos45)=−77.14kg⋅mmbΙΙx3ΙΙW�3ΙΙWbΙΙy=−(−W1ΙΙ+W2ΙΙ课后答案网−W3ΙΙsin45)=−370.58kg⋅mmθbΙΙ2222W=W+W=318.14+210.84=381.66kg⋅cmbΙΙbΙΙxbΙΙyWWm=bΙΙ=.0946kg−1bΙΙy��bΙΙθbΙΙ=tan()==78.24+π=258.24WbΙΙ400WbΙΙx解2:图解法www.hackshp.cnkg⋅mmW2ΙΙµ=10WmmW2ΙW1ΙW3ΙW1ΙΙWbΙθbΙ班级成绩姓名任课教师学号khdaw.com批改日期-36-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集第七章机械的运转及速度波动的调节7—1图示的搬运器机构中,已知:滑块质量m=20kg(其余构件质量忽略不计),lAB=lED=100mm,l=l=l=200mm,φ=φ=φ=900。求由作用在滑块5上的阻力F=1KN而换算到构件1的轴ABCCDEF12335上的等效阻力矩Mr及换算到轴A的滑块质量的等效转动惯量J。ecB2Cpfbϕ1ϕ2331EA4ϕ3D5F5khdaw.com67—2图示车床主轴箱系统中,带轮直径d0=80mm,d1=240mm,各齿轮齿数为z1′=z2′=20,z2=z3=40,各轮转动惯量为J1′=J2′=0.01kgm2,J2=J3=0.04kgm2,J0=0.02kgm2,J1=0.08kgm2,作用在主轴III上的阻力矩M3=60Nm。当取轴Ⅰ为等效构件时,试求机构的等效转动惯量J和阻力矩的等效力矩Mr。解:Ι课后答案网d1′ω0=d1=240=13ωd802′10ΙΙωz′2022=1==5.0ωz4012MΙΙΙ3ωzz′′31220×20www.hackshp.cn===.025ωzz40×40123d03ωωω022232J=J()+J+J′(+J+J)(′)+J()011223ωωω111222=.002×3+.008+.001+(.004+.001)×5.0+.004×.025=.0285ω3M=M()r3ω1班级成绩=60×.025姓名任课教师=15Nm学号khdaw.com批改日期-37-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集7—2图示为一导杆机构,设已知lAB=150mm,lAC=300mm,lCD=550mm,质量为m1=5kg(质心S1在A点),m2=3kg(质心S2在B点),m3=10kg(质心S3在lCD的中点),绕质心的转动惯量为JS1=0.05kgm2,JS2=0.002kg⋅m2,JS3=0.2kgm2,力矩M1=1000Nm,F3=5000N。若取构件3为等效构件,试求φ1=45°时,机构的等效转动惯量Je3及等效力矩Me3。D2M1Bω1ϕ1A1S3F43khdaw.com3Cmµl=.00075mmps3b3d课后答案网b2(b1)www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-38-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集7—3图示的定轴轮系中,已知加于轮1和轮3上的力矩M1=80Nm,M3=100Nm;各轮的转动惯量J1=0.1kgm2,J2=0.225kgm2,J3=0.4kgm2;各轮的齿数z1=20,z2=30,z3=40。在开始转动的瞬时,轮1的角速度等于零。求在运动开始后经过0.5s时轮1的角加速度α1和角速度ω1。M3M132O1OO312khdaw.com课后答案网www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-39-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集7—4在图(a)所示的刨床机构中,已知空程和工作行程中消耗于克服阻抗力的恒功率分别为P1=367.7W和P2=3677W,曲柄的平均转速n=100r/min,空程中曲柄的转角为φ1=1200。当机构的运转不均匀系数δ=0.05时,试确定电机的平均功率,并分别计算在以下两种情况中的飞轮转动惯量JF(略去各构件的重量和转动惯量)。(1)飞轮装在曲柄轴上;E1PDD12f2ϕ2APfP2BB1khdaw.com2ϕ11P1tCt1t2T(2)飞轮装在电机轴上,电动机的额定转速nn=1440r/min。电动机通过减速器驱动曲柄。为简化计算,减速器的转动惯量忽略不计。(a)(b)课后答案网www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-40-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集7—5某内燃机的曲柄输出力矩Md随曲柄转角φ的变化曲线如图所示,其运动周期φT=π,曲柄的平均转速nm=620r/min,当用该内燃机驱动一阻杭力为常数的机械时,如果要求运转不均匀系数δ=0.01,试求:(1)曲柄最大转速nmax和相应的曲柄转角位置φmax;(2)装在曲柄轴上的飞轮转动惯量JF(不计其余构件的重量和转动惯量)。M(Nm)Mdf2M=116.67rkhdaw.com200f1f3ϕϕ2ϕ120���30130ϕ2f3f2课后答案网f1ϕ1www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-41-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集7—6图示为某机械系统的等效驱动力矩Med及等效阻力力矩Mer对转角φ的变化曲线,φT为其变化的周期转角。设已知各块面积为Aab=200mm2,Abc=260mm2,Acd=100mm2,Ade=190mm2,Aef=320mm2,Afg=220mm2,Aga=50mm2,而单位面积所代表的功为μA=10Nm/mm2,试求该系统的最大盈亏功ΔWmax。又如设已知其等效构件的平均转速为nm=1000r/min。等效转动惯量为J=5kgm2,试求该系统的最大转速n及最小转速n,并指出最大转速及最小转速出现的位置。emaxminMMerMedkhdaw.comϕabcdefga′ϕTecgaa′df课后答案网bwww.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-42-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集第八章平面连杆机构及其设计8—1在图示的铰链四杆机构中,已知lAB=240mm,lBC=600mm,lCD=400mm,lAD=500mm,试回答下列问题:(1)当取杆4为机架时,是否有曲柄存在?存在。若有曲柄,则杆1为曲柄,此时该机构为曲柄摇杆机构。(2)要使该机构成为双曲柄机构,则应取杆1为机架。(3)要使该机构成为双摇杆机构,则应取杆3为机架,且其长度的允许变动范围为140mm~1340mm。(注:要求写出以上判断的依据)C2解:(1)∵lmin+lmax=240+600=840BlCD+lAD=400+500=9003khdaw.com1lmin+lmax<lCD+lADDA∴有整转副存在。4又lmin杆1的邻杆为机架,故有一个曲柄存在,为曲柄摇杆机构。(2)以lmin杆1为机架,得到双曲柄机构。(3)以lmin杆1的对为机架,得到双摇杆机构。杆3的取值范围:①当杆3为lmin时,应满足lmin+lmax>l余1+l余2lCD+lBC>lAB+lAD课后答案网lCD>lAB+lAD–lBC=240+500–600=140mm②当杆3非lmin时,不论如何取值均得到双摇杆机构lCD<lAB+lAD+lBC=240+500+600=1340mmwww.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-43-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集8—2试分别标出下列机构图示位置时的压力角α和传动角γ,箭头标注的构件为主动件。γFC�αα=90Cv�Bγ=0vcBBαADAD(a)(a)(b)khdaw.comvα=90�B�γ=0BαBCvCACeAαγF(c)(d)课后答案网�α=0�γ=90BF、vBwww.hackshp.cnBCvBαAγCAF(f)(e)班级成绩姓名任课教师学号khdaw.com批改日期-44-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集8—3在下列图示的各机构中,已知各构件的尺寸(比例尺μl=0.0025m/mm),杆AB为主动件,转向如图所示。要求:(1)给出各机构中杆AB为曲柄的条件和机构的名称;(2)机构是否存在急回运动?若存在,试用作图法确定其极位夹角θ,计算其行程速比系数K,并确定从动件工作行程的运动方向;(3)求作最小传动角γmin(或最大压力角αmax);(4)机构是否存在死点位置?若存在,试说明存在的条件和相应的位置。机构简图杆AB(或BC)为曲柄的条件机构名称及其他C′C杆AB为曲柄的条件:名称:曲柄摇杆机构2C�θ=13lAB+lmax≤l余1+l余2180�+θC′′γ21K==.11557BCminγ=γ180�−θ1minminkhdaw.comθB2�γmin=36B′B′′AD工作行程:顺时针向c1→c2死点位置:AB1C1DB1(a)AB2C2D以CD为原动件有死点位置。名称:曲柄滑块机构B′B杆AB为曲柄的条件:θ=14��180+θBlAB+e≤lBCK==1.171�A180−θBγ=51�2Cmineθ工作行程:C2→C1C1C′C2死点位置:ABCDγ课后答案网11min当e=0时:l≤lABCDABBC22(b)以滑块为原动件有死点位置。杆AB为曲柄的条件:名称:摆动导杆机构www.hackshp.cn�lAB+e+∞≤lAC+∞θ=97�180+θBK==.3337lAB+e≤lAC180�−θ�γ=27minAθFla34正传动正传动其中:3、4方案较为合理。课后答案网www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-81-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集10—15如图所示三对齿轮传动,已知z1=12,z2=47,z3=15,z4=45,z5=36,z6=25,两轴中心距a′=120mm,α=20°,ha*=1,c*=0.25,m=4mm,试确定三对齿轮的传动类型,说明理由并确定各轮的变位系数。解:z5zz3m41a=(z+z)=(12+47)=118mm121222m4a=(z+z)=(15+45)=120mm343422a′m4a=(z+z)=(36+25)=122mm565622a′a34a负传动−1a12−1118�−1��(1)α′=cos(cosα)=cos(cos20)=cos(.0924)=22.4773=2282′83′′12a′120z1+z212+47x+x=(invα′−invα)=(.00214466−.0014904)=.0530312�2tanα2tan20*zmin−z117−12x=h==.029411minaz17min可取:x1=x1min=.02941则:x2=.05303−.02941=.02362�(2)α′34=α=20x1+课后答案网x2=0z−z17−15z−z17−45*min3*min4x=h==.01176x=h==−.164713mina4minaz17z17minmin可取:x3=x3min=.01176则:x4=−x3=−.01176>x4min(3)−1a56α=−1122�=−1=�=�′′α′=cos(cos)cos(cos20)cos(.09554)17.185317117056www.hackshp.cna′120z+z36+2556x+x=(invα′−invα)=(.0009330516−.0014904)=−.04675656�2tanα2tan20z−z17−36*min5x=h==−.111765minaz17min*zmin−z617−25x=h==−.047066minaz17min可取:x5=−3.0则:x6=−.0167班级成绩姓名任课教师学号khdaw.com批改日期-82-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集10—16一对渐开线直齿圆柱齿轮,已知m=2mm,z1=z2=10,α=20°,ha*=1,c*=0.25,用齿条刀范成加工,求其不发生根切的最小中心距a′min。解:z−z17−10*min5x=x=h==.041181min2minaz17minm2a=(z+z)=(10+10)=20mm1222�2tanα(x+x)2tan20(.04118+.04118)12invα′=invα+=.0014904+=.004488z+z10+1012��查渐开线函数表:α′=2812′=28.35�cosαcos20a′=a=20×=21.3551mmmin�khdaw.comcosα′cos28.3510—17一对高度变位齿轮,z1=12,x1=0.5,z2=33,x2=-0.5,m=20mm,α=20°,ha*=1,c*=0.25。今将大齿轮2的齿数改为z"2=32,而小齿轮仍用原来的,中心距也不变,试确定大齿轮2′的变位系数x′2。解:m20a=(z+z)=(12+33)=450mm=a′1222将大齿轮齿数改为z′2=32后,则有:m20课后答案网a=(z+z′)=(12+32)=440mm1222α′=cos−1(acosα)=cos−1(440cos20�)=cos−1(.09188)=23.2472�=23�41′05′′a′450z1+z212+32x1+x′2=(www.hackshp.cninvα′−invα)=�(.00238358−.0014904)=.053992tanα2tan20x′=.05399−x=.05399−5.0=.0039921班级成绩姓名任课教师学号khdaw.com批改日期-83-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集10—18已知一对渐开线直齿圆柱齿轮,z1=15,x1=0.3128,z2=21,x2=-0.1921,m=5mm,α=20°,ha*=1,c*=0.25,试:(1)判断在用齿条形刀具范成加工这两个齿轮时,是否会产生根切现象?(2)求这对齿轮作无侧隙啮合传动时的中心距a′。解:z−z17−15*min1x=h==.011761minaz17minz−z17−21*min2x=h==.023532minaz17minx1>x1minx2>x2min不会发生根切现象。�2tanα(x+x)2tan20(.03128−.01921)12invα′=invα+=.0014904+=.0017344z+z15+2112查渐开线函数表:�khdaw.comα′=21m5a=(z+z)=(15+21)=90mm1222�cosαcos20a′=a=90×=90.5892mm�cosα′cos2110—19某机床上装有一对正常齿标准外啮合直齿圆柱齿轮,且按标准中心距安装,已知m=5mm,z1=z2=60,α=20°,后因齿轮磨损,将两轮拆下一起修理。修理后两轮齿顶圆直径均减少4mm,试:(1)计算修理后齿轮的变位系数x、分度圆直径d、齿顶高ha;(2)说明修理后齿轮是否发生根切?(3)若将修理后的齿轮重新安装到原位置,计算节圆上的齿侧间隙j′t和顶隙c′。解:课后答案网(1)齿面磨损后渐开线被破坏,修理后相当于对该齿轮进行负变位加工。xm=−2mm−2−2x===−4.0m5d==mz=5×60www.hackshp.cn=300mm*h=hm+xm=5−4.0×5=3mmaa(2)*zmin−z117−60x=h==−.25294minaz17minx>xmin不会发生根切现象。(3)�j′=2×2xmtanα=2×2×4.0×5×tan20=.29118mmt*c′=cm+4=.525mm班级成绩姓名任课教师学号khdaw.com批改日期-84-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集10—20已知一对渐开线标准直齿圆柱齿轮,z1=20,z2=80,m=5mm,α=20°,ha*=1,c*=0.25,安装中心距a′=255mm,试问:(1)此传动存在什么问题?(2)若将标准齿轮改为变位齿轮,为何种传动类型?(3)若按x1/x2=z2/z1分配变位系数,则计算齿轮1的齿顶圆半径ra1。解:(1)m5a=(z+z)=(20+80)=250mm1222∵a′>a存在问题:有侧隙、不是标准顶隙、重合度降低等。(2)∵a′>a正传动(3)−1a−1250�−1��α′=cos(cosα)=cos(cos20)=cos(.09213)=22.8879=2235′61′′khdaw.coma′255z+z20+8012x+x′=(invα′−invα)=(.002269−.0014904)=.1070757712�2tanα2tan20x1z280===4xz2021x+x.1070757712x===.021415255x=.0856611a−′a255−250y===1m5∆y=x+x−y=.10707577−1=.0070757712mz1*课后答案网5×20r=+(h+x−∆y)m=+(1+.085661−.00707577)×5=58.92925mma1a122www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-85-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集10—21已知一对渐开线直齿圆柱齿轮传动,安装中心距a′=155mm,传动比i12=8/7,m=10mm,α=20°,ha*=1,c*=0.25,试设计这对齿轮传动(确定齿数、传动类型、变位系数,计算几何尺寸,验算齿顶厚sa≥[sa]=0.4m和重合度εα≥[εα])。mcosαmzcosαmz解:a′=(z+z)=1(1+i)≈1(1+i)=155mm1212122cosα′2cosα′2z=14.47z=16.5312可能的传动方案如下:方案z1z2a传动类型传动比误差(%)11416150正传动021417155高度变位传动6.2531516155高度变位传动6.6741517160负传动0.83比较而言,方案khdaw.com1较为合理。现按方案1进行设计。−1a−1150�−1��α′=cos(cosα)=cos(cos20)=cos(.09094)=24.5802=2443′94′′a′155z1+z214+16x+x=(invα′−invα)=(.0028424−.0014904)=.0557212�2tanα2tan20*zmin−z117−14*zmin−z217−16x=h==.01765x=h==.005881mina2minaz17z17minmin取x1z216===.11428x=.026x=.0297221xz1421a′−a155−150y===5.0∆y=x+x−y=.05572−5.0=.0057212m10d=mz=10×14=140mmr=70mm11课后答案网1d=mz=10×16=160mmr=80mm222*h=m(h+x−∆y)=10×(1+.02972−.00572)=124.mmh=12.028mma1a1a2d=d+2h=140+2×124.=1648.mmr=824.mma11a1a1d=d+2h=160+2×12.028=184.056mmr=92.028mma22a2a2d=dcosα=140cos20www.hackshp.cn�=131.56mmr=65.78mmb11b1�d=dcosα=160cos20=150.35mmr=75.17mmb22b2−1db1−1131.56����α=cos()=cos()=37.0318=3710′55′′α=35.2272=3531′83′′a1a2d1648.a1ππ�s=(+2xtanα)m=(+2×.02972tan20)=17.87mms=176.mm11222ra1s=s−2r(invα−invα)=.567mm>4.0ms=.617mm>4.0ma11a1a1a2r11ε=[z(tanα−tanα′)+z(tanα−tanα′)]=.128α1a12a22π班级成绩姓名任课教师学号khdaw.com批改日期-86-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集10—22某工厂仓库现存有四个标准直齿圆柱齿轮,它们的基本参数为:齿轮1z1=19,m=3mm,α=20°,ha*=1,c*=0.25齿轮2z2=21,m=3mm,α=20°,ha*=1,c*=0.25齿轮3z=81,m=3mm,α=20°,h*=1,c*=0.253a齿轮4z=79,m=3mm,α=20°,h*=1,c*=0.254a现要修配一对外啮合齿轮传动,其中心距a′=150mm,要求传动比i=4±0.1,问(1)在这四个齿轮中能否选出一对满足要求?为什么?(2)尽量利用现有齿轮提出最佳修配方案(可另加工一齿轮),并作简要说明。解:(1)m3a=(z+z)=(19+81)=150mm131322z381i===.42632z191m3a=(z+z)=(19+79)=147mm≠150mmkhdaw.com141422m3a=(z+z)=(21+81)=153mm≠150mm232322m3a=(z+z)=(21+79)=150mm242422z794i===.37619z212不能选出一对满足要求的齿轮。(2)用z3=81的齿轮,再加工一个z=20的齿轮:z81i=3==.405满足传动比要求,但z20课后答案网m3a=(z+z)=(20+81)=1515.mm>a′须用负传动,不是最佳方案。322用z4=79的齿轮,再加工一个z=20的齿轮:z479i===.395满足传动比要求,且z20www.hackshp.cnm3a=(z+z4)=(20+79)=1485.mmz+2h122ak课后答案网180°∴(16+32)sin=33.94<32+2×1=344不满足邻接条件,所以均布四只行星轮不能否实现,但可以均布三只行星轮,因为:z+z16+8013满足均布安装条件==32www.hackshp.cnk3180°*∵(z+z)sin>z+2h122ak180°∴(16+32)sin=41.56>32+2×1=343满足邻接条件。班级成绩姓名任课教师第十二章其它常用机构学号khdaw.com批改日期-105-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集12—1牛头刨床工作台的横向进给螺杆的导程l=3mm,与螺杆固联的棘轮齿数z=40,试问棘轮的最小转动角度φmin是多少?该牛头刨床的最小横向进给量s是多少?解:棘轮最小转动角度360�360��ϕ===9minz40牛头刨床最小横向进给量�ϕ9mins=l=×3=.0075mm��360360khdaw.com12—2在六角车床外接槽轮机构中,已知槽轮的槽数z=6,槽轮静止时间tj=5/6s/r,运动时间是静止时间的两倍,试求:(1)槽轮机构的运动系数k;(2)所需的圆销数n。解:(1)55t=2t=2×=dj635td32k===td+tj5+5336(2)课后答案网2z22×6n=k=×=2z−236−2www.hackshp.cn班级成绩12—3图示为微动调节的螺旋机构。构件1与姓名任课教师机架3组成螺旋副A,其导程lA=2.8mm,右旋。学号khdaw.com批改日期-106-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com
机械原理作业集构件2与机架3组成螺旋副C,2与1还组成螺旋副B。现要求当构件1转一圈时,构件2向右移动0.2mm,问螺旋副B的导程lB为多少?右旋还是左旋?解:1右旋AC2s=l−lBABl=s+l=2.0+8.2=3mmAB3khdaw.com12—4图示螺旋机构中,已知螺旋副A为右旋,导程lA=2.8mm;螺旋副B为左旋,导程lB=3mm,C为移动副。试问螺杆1转多少转时才使螺母2相对构件3移动10.6mm。解:s=(l+l)ϕ/2π2ABA1Bs106.ϕ=×2π=×2πl+l8.2+3AB课后答案网C=.183×2π=11.483rad3�=6588.螺杆1转1.83转时才使螺母2相对构件3移动10.6mm。www.hackshp.cn班级成绩姓名任课教师学号khdaw.com批改日期-107-若侵犯了您的版权利益,敬请来信通知我们!℡www.khdaw.com'
您可能关注的文档
- 大学物理 上册 (罗圆圆 著) 江西高校出版社 课后答案
- 新视野大学英语(第二版)读写教程第一册至第四册课后习题答案完整版
- 工程流体力学 第三版 (孔珑 著) 中国电力出版社 课后答案
- Communication Systems Engineering 通信系统工程 答案
- 大学物理 下册 (百文 著) 上海交通大学出版社 课后答案
- 工程流体力学 上册 (李文科 著) 中国科学技术大学出版社 课后答案
- 机械设计基础课后习题答案(第四版)陈立德___罗卫平
- 工程流体力学课后习题答案(杨树人)
- 新视野大学英语1—4 第二版 (郑树棠 著) 外语教学与研究出版社 课后答案
- 大学物理 下册 (付茂林 彭志华 著) 华中科技大学出版社 课后答案
- 新视野大学英语创意阅读3 (郑树棠 著) 外语教学与研究出版社 课后答案
- 工程流体力学实验指导书 (李成华 著) 中国石油大学出版社
- 新视野大学英语第二版读写教程 (王大伟 著) 外研社 课后答案
- 机械优化设计》孙靖民 哈尔滨工业大学 课后答案
- 大学物理 下册 (杨晓雪 著) 华中科技大学出版社 课后答案
- 工程流体力学实验指导书 (倪玲英 李成华 著) 中国石油大学出版社 课后答案
- 机械原理 (李琳 著) 西北工业大学 课后答案
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明