

- 240.96 KB
- 2022-04-22 11:29:31 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'UDC535:771-335N30中华人民共和国国家标准G1311168-89光学系统像质测试方法imagequalityofopticalsystemsMethodofdetermination1989-03-31发布1989-05-01实施国家技术监督局发布
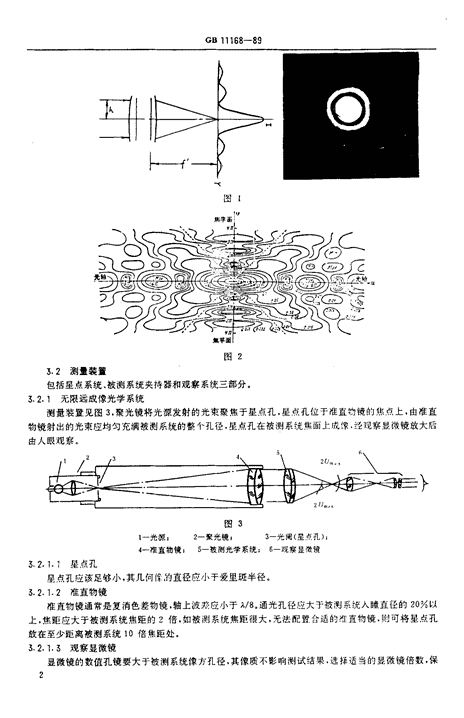
中华人民共和国国家标准光学系统像质测试方法GB11168-89ImagequalityofopticalsystemsMethodofdetermination主皿内容与适用范围本标准规定了用于评价光学系统像质的星点、分辨力、几何像差和波像差的测试方法。本标准适用于可见光谱区内应用的无限远成像光学系统、远焦光学系统和有限距成像光学系统.对其他临近光谱区内应用的光学系统可参照使用.引用标准GB7671照相镜头测试板GB7552摄影镜头分辨率测试图ZBN35003分辨力板星点测试方法3.1原理根据星点(点光源)经被测系统成像局.在像面和像面前后不同截面所成衍射像的光强分布(即星点像的光强分布)来判断成像质量.理想光学系统在像面上所成星点像的光强分布I是光瞳面上复振幅分布函数(简称瞳函数)的付氏变换模的平方。在圆形光瞳的情况下,光强分布函数即爱里斑(Airy)分布为:1=1.FJ2,(丝1.................................................(1).‘vJ:=2a(a)r=2,(a)z-+P....................................(2)人J"nJ式中:10—被测系统所成星点衍射像的中央处光强;J,-1阶贝塞尔函数,尹—被测系统焦距;a—被测系统光瞳半径;,—距被测系统几何像点的径向距离。星点在像面内衍射图形见图1,根据衍射理论可计算理想像面附近子午面上光强分布。通过光轴截面上衍射光强分布图(见图2),在像面前后对称截面上应具有相刚衍射图案。对于有像差的光学系统,其星点像的光强分布与爱里斑有差异。根据其星点衍射图形以及像面附近不同截面上衍射图形的变化.可以判断像质的好坏。中华人民共和国机械电子工业部1989-03-25批准1989一05-01实施
GB11168-89图23.2测里装置包括星点系统、被测系统夹持器和观察系统三部分。3.2.1无限远成像光学系统测量装置见图3,聚光镜将光源发射的光束聚焦于星点孔,星点孔位于准直物镜的焦点上,由准直物镜射出的光束应均匀充满被测系统的整个孔径,星点孔在被测系统焦面上成像经观察显微镜放大后由人眼观察。图3t一光源t2-聚光镜,3一光阑(星点孔)4-准直物镜;5-被测光学系统;6-观察显微镜3.2.1.1星点孔星点孔应该足够小,其几何(S的直径应小于爱里斑半径。3.2.12准直物镜准直物镜通常是复消色差物镜,轴上波差应小于R/8,通光孔径应大于被测系统入瞳直径的20%以上,焦距应大于被测系统焦距的2倍,如被测系统焦距很大,无法配置合适的准直物镜,则可将星点孔放在至少距离被测系统10倍焦距处。3.2.1.3观察显微镜显微镜的数值孔镜要大于被测系统像方孔径,其像质不影响侧试结果,选择适当的显微镜倍数,保2
GB11168-89证人眼能分辨爱里斑。3.2.2远焦光学系统用观察望远镜代替观察显微镜,其他同3.2.1条。3.23有限距成像系统检测条件应与被测系统的使用条件一致,星点和观察显微镜要求与3.2.1条和3.2.1.3条一样。3,3判别方法3.3.1判别被测系统存在的应力、材料缺陷和偏心当被测系统存在应力、材料缺陷和偏心时,视场中心的星点衍射图形如图所示。侧....国日被测系统存在应力C被M}l系统存在偏心和零件定中不准图刁3.3.2判别被测系统的色差被测系统存在色差时其星占衍射像呈彩色.根据色彩判别色差校正情况。3-3.3圳别被洲系统球获、!。f.一’一泛t.}ft:}i6f5黑}i(i-;i;,f:i.:",ih}d+t.}r;iilidtiatJf}tf.i豁fRifiit1l:,Jf};ktzft1,>"t};截f-+4t,td?4}9h1")i}fi5}t1fIfL}洁t;th-?:}1til1f.-Y}".PL1N!!5.e里斑
GB11188-89于二系统球差校正过度rt._乳1少系统球差校正不足特}-aU套耳系统存在带球差图5分辨力测试方法4.1原理光学系统的分辨力是指分辨物体细节的能力.理想光学系统对一个发光物点所成的像是一个爱里斑,对两个相邻发光物点所成的像是两个爱里斑的迭加,见图6。根据“瑞利准则’,两个相邻像点刚能分辨时,其对比度C应不低子15yo,实际上C在2.6%左右人眼也能分辨.在通常测量中用黑白线条相间、宽度相等的矩形(或扇形)图案作为测量目标。各类系统理论分辨力见附录A,*menWIw图64.2测试装置包括分辨力板系统、被测系统夹持器和观察显微镜系统三部分。除以分辨力板代替星点板之外,其
GB11188-89他与星点法相同,分辨力板应符合ZBN35003,GB7671,GB7552的规定.4.3I!f结果裹示4.3.1轴上分辨力如图7,分辨力板图案中某一单元在视场中心成像刚能分辨时.像面上每毫米长度内的线对数为No.M凡-Y,一口式中:M-线对数,Y—对应长度,mm.远焦光学系统的分辨力以分辨角。表示:。一势X206265(")··..·.....·..·.....·...........⋯⋯,,⋯⋯(;)i份,式中:a,-。单元线条中心距。A,—准直物镜焦距.公丰[贫A向解。a轴上图71一平行光管,2一被侧物镜,3一像平面,4-图案线的水平线条;5-图案线的竖线条.4.3.2轴外分辨力轴外测量时,被测系统光轴对测量装置的光轴转过半视场角。,在子午方向分辨线对数N:为M=Nocos"ao···········..............................(5)Y/COS"w在弧矢方向分辨线对数从为M=Nocosw..:..........................................(6)Y/cosw
GB11168-as式中:。—半视场角‘5几何像差测试方法乐原理测量不同色光、不同视场、不同入射高度的细光束在光轴上交点的位置时,较常用的方法为哈特曼法乐2浪1量装置测量装让示意图见图a。在准直物fft和被测物镜之间放置一个米字形光阑,其小孔对准直物镜光轴呈对称分布,由准直物镜射出的平行光束通过米字形光阑后被分割成许多不同高度的细光束对。00图81一光912-班光镜盆3一小孔光阂;月一准直物镜;5一米字形光阑,6一被测物镜5.2.1米字形光阑根据被测物镜的焦距和相对孔径,选择合适的米字形光阑,光阑孔要等距分布,其直径一般为被测物镜焦距的1八00^-1/400,5.22焦前和焦后截面位置的选择为了使米字形光斑小而清晰,焦前和焦后截面的距离分别为被测物镜焦距的1/7和1/5。5.2.3准直物镜要求与3.2.1.2条相同。5.3测里程序通过被测物镜的光线由于存在像差,不同高度h的细光束聚焦在不同的焦点F=,其位置通过测量焦点前、后两个截面E:和Ez上的米字形光斑中心距和两截面间距后计算得到。5.3.1轴上纵向球差测量由准直物镜射出的平行光.经过米字形光阑上一对相对中心距离为h。的小孔后在焦前和焦后截面E、和Es上测得其中心距分别b,和b,按式(7)可求出这对光线的空问交点F.的位置坐标凡n‘以前截面E为参考面)。万r兀‘”‘”’“’‘式中:d一.热埃前和焦后两截面之问的yF离6
GB11168-89近轴光线交点位置坐标So,由测量一组高度为2h。光线对交点的位置坐标S.,以及以h。为纵坐标,J=为横坐标,连成曲线,将此曲线外推得到.球差S.-S..53.2纵向色差测量选用与被测物镜消色差谱线一致的单色光源,在同一参考面下分别测量不同谱线的球差。53.3轴外像差测量被测物镜的入瞳中心调整在光具座垂直转轴上,并相对准直物镜光轴转一角度。测量方法和球差测量方法相似,可测量轴外像散、场曲和彗差.波像差测试方法光学系统的波像差是指通过光学系统后的实际波面相对于理想波面的偏差,最常用的测量方法是干涉法。6.1干涉法原理被测系统的实际波面与参考波面(理想波面)之间相互干涉,形成干涉图。从干涉图求出实际波面的形状和波像差的大小。6.1.1由参考镜产生参考波面以参考镜反射所形成的波面作为参考波面。如泰曼一格林干涉仪、斐索千涉仪等.6.1.2由小孔衍射产生参考波面以像面上小孔衍射所形成的波面作为参考波面,如点衍射干涉仪。6.1.3自身波面作为参考波面由被测波面本身不同部分作为参考波面.如波面剪切干涉法。常用波面剪切方式有横向、径向、旋转和翻转等方法,见图9,(口口口口旋转剪切a翻转剪切图96.2干涉法测1装置包括照明系统、干涉系统和目视(摄影、摄像或图像实时处理)系统三个部分.6.2.1照明系统6.2.1.1光源光源的光谱特性应符合被测系统的使用要求。光源为单色光,其谱线宽度」久应不影响干涉条纹的对比度。6.2.飞.2小孔光阑
GB11168-89光阑尺寸应保证干涉条纹有足够的亮度又有较好的对比度.6.2.1.3准直物镜要求轴上波差小于人邝.6.2.2干涉系统本身产生的波差应小于t/20.在扫描干涉系统中,由于采用波面相减技术,可以校正仪器的系统误差,对元件要求可降低。6.2.3目视(摄影、摄像或图像实时处理)系统要求晴变小,不影响判读干涉图形.6.3千涉图的处理被测波面和参考波面之间的偏差,用被测系统光瞳面内最大峰一谷值(y-V)表示。人工判读千涉图的第一步是确定参考间隔.两条最边缘千涉条纹与孔径边界相交的四个点A,B,C,D见图10.孔径内至少有5-7条纹,先将两个交点连成直线,过一个交点C和D作一条平行线,用D,和D,表示两条平行线截得条纹的距离,条纹平均间距H由式(8)求得:D+D,_________""".....tQ月=T(-.A二1)””””’‘””””””””’------一、价式中:N—孔径内条纹数。连接中央条纹和两条平行线的交点,称为主参考线.以平均间距H为间距,画出与主参考线平行的其他参考线,这些参考线组成了干涉条纹图,记录每条纹相对于参考线的偏差h(峰一谷值p-V),把左偏差h,峰值刃极大值和右偏差ha(谷值V)极大值的绝对值相加,即波面的峰一谷值.h=}(hx).}+1(h)。二卜...........................................(9)光程差(OPD),条纹数:(OPD)==习H...................................................(10)光程差(OPD),波长数:单通道干涉仪(OPD),=(OPD)x.............................................(I1)双通道干涉仪(OPD),=(OPD).X1/2.............................................(12)
GB11168-89。通道千涉仪(OPD)A=(OPD).X1/n..........................................(13)也可用干涉图自动处理系统得到波面的峰一谷值。剪切干涉图要进行一定的处理后,才能得到波面的峰一谷值。
GS11168-89附录A各类系统理论分辨力(补充件)表A1各类系统理论分辨力c=盆5%c=2.5无焦系统1.2221401.o5A120叫.,.~二二-一竺留一DDDD(")无限远成像系统7147711716一二二一一,二一Ip/mm1.22AFF1.05)FF显微系统0.61A0.340.52A0.29.盖二一一竺胃宝一NANA夕月NApn〕表中:I二一I=,(A1)I-.十1-D—入瞳直径,mm;F—光阑指数;NA-数值孔径;1.=0.550uma附加说明本标准由上海光学仪器研究所归口并负贵起草。'
您可能关注的文档
- GB 10834-89 船舶漆耐盐水性的测定 盐水和热盐水漫泡法.pdf
- GB 10836-1989 船用焚烧炉技术条件.pdf
- GB 10846-1989 船用磁罗经自动操舵仪通用技术条件.pdf
- GB 11019-1989 镀镍圆铜线.pdf
- GB 11021-1989 电气绝缘的耐热性评定和分级.pdf
- GB 11032-2000 交流无间隙金属氧化物避雷器.pdf
- GB 11034-1989 船用电动往复泵.pdf
- GB 11035-1989 船用电双螺杆泵.pdf
- GB 11112-89 有色金属大气腐蚀试验方法.pdf
- GB 11179-1989 橡胶试验数据分布类型检验规定.pdf
- GB 11183-89 自行车用面漆.pdf
- GB 11184-89 自行车用底漆.pdf
- GB 11185-89 漆膜弯曲试验(锥形轴).pdf
- GB 11186.1-1989 漆膜颜色的测量方法 第一部分原理.pdf
- GB 11186.1-89 涂膜颜色的测量方法第一部分 原 理.pdf
- GB 11186.2-1989 漆膜颜色的测量方法 第二部分颜色测量.pdf
- GB 11186.2-89 涂膜颜色的测量方法第二部分 颜色测量.pdf
- GB 11186.3-1989 漆膜颜色的测量方法 第三部分色差计算.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明