

- 944.50 KB
- 2022-04-22 11:35:51 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
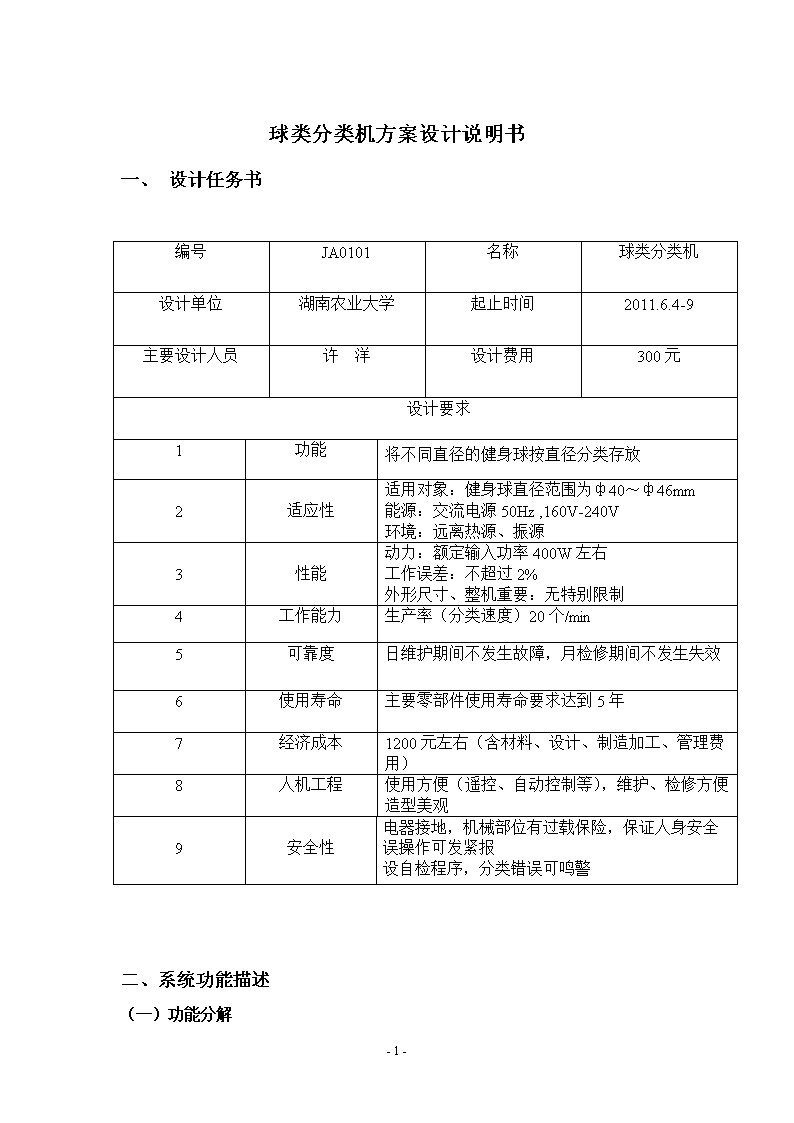
'球类分类机方案设计说明书一、设计任务书编号JA0101名称球类分类机设计单位湖南农业大学起止时间2011.6.4-9主要设计人员许洋设计费用300元设计要求1功能将不同直径的健身球按直径分类存放2适应性适用对象:健身球直径范围为ф40~ф46mm能源:交流电源50Hz,160V-240V环境:远离热源、振源3性能动力:额定输入功率400W左右工作误差:不超过2%外形尺寸、整机重要:无特别限制4工作能力生产率(分类速度)20个/min5可靠度日维护期间不发生故障,月检修期间不发生失效6使用寿命主要零部件使用寿命要求达到5年7经济成本1200元左右(含材料、设计、制造加工、管理费用)8人机工程使用方便(遥控、自动控制等),维护、检修方便造型美观9安全性电器接地,机械部位有过载保险,保证人身安全误操作可发紧报设自检程序,分类错误可鸣警二、系统功能描述(一)功能分解-22-
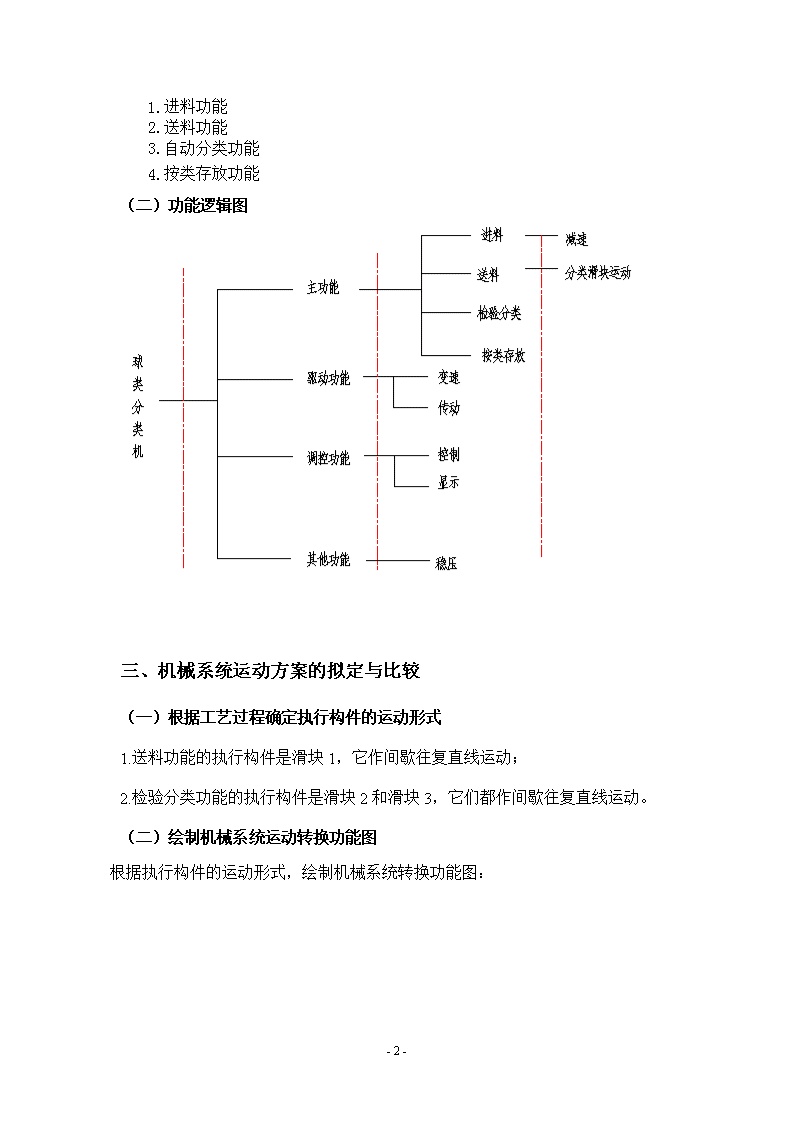
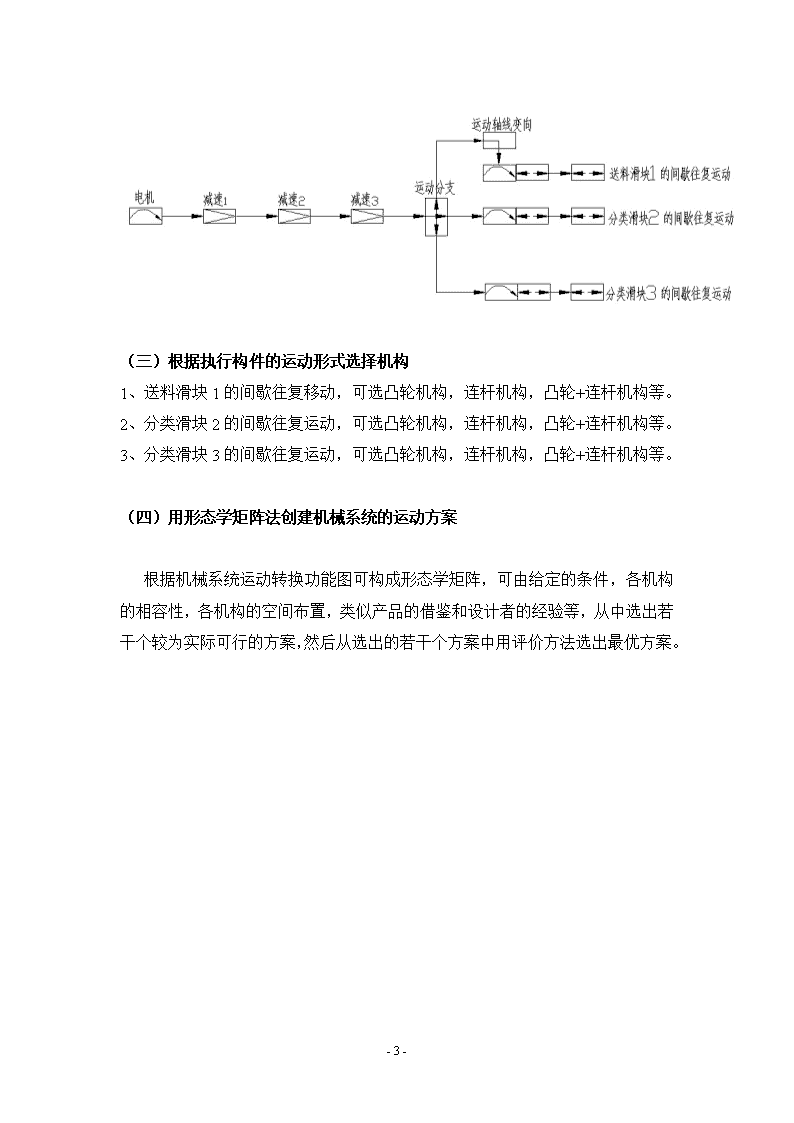
1.进料功能2.送料功能3.自动分类功能4.按类存放功能(二)功能逻辑图三、机械系统运动方案的拟定与比较(一)根据工艺过程确定执行构件的运动形式1.送料功能的执行构件是滑块1,它作间歇往复直线运动;2.检验分类功能的执行构件是滑块2和滑块3,它们都作间歇往复直线运动。(二)绘制机械系统运动转换功能图根据执行构件的运动形式,绘制机械系统转换功能图:-22-
(三)根据执行构件的运动形式选择机构1、送料滑块1的间歇往复移动,可选凸轮机构,连杆机构,凸轮+连杆机构等。2、分类滑块2的间歇往复运动,可选凸轮机构,连杆机构,凸轮+连杆机构等。3、分类滑块3的间歇往复运动,可选凸轮机构,连杆机构,凸轮+连杆机构等。(四)用形态学矩阵法创建机械系统的运动方案根据机械系统运动转换功能图可构成形态学矩阵,可由给定的条件,各机构的相容性,各机构的空间布置,类似产品的借鉴和设计者的经验等,从中选出若干个较为实际可行的方案,然后从选出的若干个方案中用评价方法选出最优方案。-22-
球类分类机的形态学矩阵分功能功能解12345A减速1带传动齿轮传动蜗杆传动B减速2带传动齿轮传动蜗杆传动C减速3带传动齿轮传动蜗杆传动D送料滑块1运动凸轮机构连杆机构凸轮+连杆机构E送料滑块2运动凸轮机构连杆机构凸轮+连杆机构F送料滑块3运动凸轮机构连杆机构凸轮+连杆机构G驱动双速电动机齿轮传动滚筒双速电动机带传动滚筒双速电动机内装电滚筒直流电动机齿轮滚筒H调控电测仪表调控微机处理机调控微型计算机调控模拟指针式调控I稳压交流稳压电源直流稳压电源集成二端稳压电源根据经验和问卷调查可知A1B2C2D1E1F1G2H2I1即为设计的最佳方案。四、机械系统运动系统设计(一)方案设想方案一自动检验分类机的主要用途就是将不同直径大小的健身球分成三类,我们提出了如下图的运动装置:-22-
图2.2该方案将送料机构与检料机构中的滑块运动统一起来,在上滑块将球推出的同时下滑块上边缘也正好抵达料道1的口缘处,向下运动时对球进行检测分类。但考虑到球在检料机构通道中向下运动至靠近料道时,有可能球会卡在料道口而不能进行正常分类。以及检料机构滑块间歇时间不易控制,所以我们放弃这一方案,选用改进的方案二。方案二运动方案图:-22-
图2.3(二)原动机及传动机构的选择1、原动机的选择表一:型号电流转速效率功率因数电压Y112-M48.81440r/min84.5%0.82380v2、传动机构的选择机械系统中的传动机构是把原动机输出的机械能传递给执行机构并实现能量的分配、转速的改变及运动形式的改变的中间装置。传动机构最常见的有齿轮传动、带传动、蜗杆传动等。3、执行机构的选择与比较A、进料机构-22-
图2.4如上图所示为漏斗状进料机构,槽体上安装有一个振荡器,槽体高度h,可根据待测球数量适度调整。槽壁的倾斜角度为α,其对槽体和健身球的受力情况有较大的影响。如果α角度过大,则健身球整体向下的压力不足,影响了传递的连续性;如果α角度过小,则球之间互相压力增大,健身球流动性下降。所以,。我们取α=35°对于导管直径d,为了保证良好的流动性d应该大于最大球的直径,并保证的盈余空间;但也不宜过大,过大尺寸的直径d容易造成球体之间的相互摩擦力增加,造成导管的堵塞。考虑到待测球在漏口堵塞情况,设置了如下图所示的振荡器装置: -22-
为了防止料槽中,健身球堵塞,本装置使用了如上图所示的解卡振荡器。本振荡器使用电动机2来带动偏心轮1转动,由于偏心轮质心偏离转动中心,因此产生振动的效果。把解卡振荡器安装于料槽壁上带动料槽振动,使料槽中健身球的流动性得到加强,很大程度的减小了健身球被卡住的几率。B、送料机构方案一、四连杆机构图2.6方案二、对心凸轮滑块机构-22-
以上两种方案各有特色,两者都同样能玩成工作任务,但前者有急回特性,有冲击,而后者若采用摆线或五次多项式运动规律,则可避免冲击,并且结构更为简单,便于设计,杆件少,功能损失更少,能出色地完成认务,所以选用后者,即对心凸轮滑块机构。4、检验分类与按类存放A、检验分类机构方案一:图2.8 方案二: -22-
图2.9从理论上来讲,以上两种方案都可以实现健身球自动检验分类的功能,但是,前面我们已经提到,实际上方案一在料道1处,直径在φ44及以上的健身球会卡住,而无法实现分类,故选方案二。 在方案二的检料箱体中,设有待测球出口料道1、料道2、料道3,料道顺序为尺寸从小到大依次设置,小球先检测,接着检测中球,大球直接滚出,为了使球能够快速稳定地经过料道尺寸检测,设计轨道与水平夹角为:β=10°料道相应尺寸大小如表三:料道1料道2料道3料道直径(mm) 44 46 48设置滑块轨道有关尺寸为: 其中,是滑块1的行程, mm mm另外,在滑块2的前端,留有在的距离,因为考虑到健身球的形状以及其重力作用,其能够按照预想的路程进行检料。B、按类存放装置 如下图所示:-22-
图2.10(三)机械系统工作运动循环图1、根据工艺动作顺序和协调要求拟定运动循环图 机械系统运动方案有3个执行构件需要进行运动协调设计,它们是送料机构(滑块1),检验分类机构(滑块2和滑块3),在运动循环图中,分别用送料,分类Ⅰ,分类Ⅱ来表示。横坐标表示分配轴的转角,送料的纵坐标表示送料滑块1的运动(由右向左为正),分类Ⅰ的纵坐标表示滑块2的运动(由下向上为正),分类Ⅱ的纵坐标表示滑块3的运动(由下向上为正)。如下图所示:-22-
图4.1表四:执行阶段运动阶段运动时间(s)分配转角(°)送料阶段送料远休回程近休 0.75s 0.5s 0.75s 1s 90° 60° 90° 120°分类Ⅰ阶段近休升程远休回程 1s 0.75s 0.5s 0.75s 120° 90° 60° 90°分类Ⅱ阶段送料远休回程近休 0.75s 0.5s 0.75s 1s 90° 60° 90° 120°(四)机构的尺寸设计及运动分析1、送料凸轮和分类Ⅱ凸轮的设计-22-
图5.1-22-
图5.2调试结果:-22-
1、分类Ⅰ凸轮的设计图5.3-22-
图5.4-22-
3、结果分析根据实践经验,在推程时,许用压力角的值对于移动从动件,=30°~38°。在回程时,对于力封闭的凸轮,由于这时使从动件运动的是封闭力,不存在自锁的问题,故可采用较大的压力角,通常取=70°~80°。并且,最大压力角因此,我们取=30°,'=70°。从上面的调试结果可知,升程<=30°,回程最大压力角=70°,且无运动失真现象,故满足设计要求。4、减速装置的尺寸设计图5.5-22-
本分类装置采用上图所示的减速器,由传送带和齿轮系构成的减速装置。其中一对齿轮的传动比是有限的,由于本装置需要较大的传动比,固采用轮系来实现。A、皮带传送:图5.6如图所示为皮带减速机构,带轮1连接原动件转速为=1440r/min的交流电动机,皮带2连接齿轮系中的齿轮1,皮带1的半径为,皮带2的半径为,根据皮带传动原理有:=(1)皮带1与皮带2的转速与半径成反比:=(2)B、齿轮系传动:如图5.5-22-
所示,带轮2与齿轮1同轴传动,齿轮1与齿轮2啮合传动,齿轮2与齿轮3同轴传动,齿轮3与齿轮4啮合传动,齿轮4与直齿锥同轴连接,根据齿轮系传动原理有:(3)由上式可得: (4)C、直齿锥齿轮:图5.7如图5.5所示,直齿轮4与直齿锥齿轮5、凸轮7、凸轮8同轴传动,直齿锥齿轮5与直齿锥齿轮6垂直啮合,直齿锥齿轮6与凸轮9同轴连接,根据齿轮传动原理有:=(5)=(6)由凸轮9与直齿锥齿轮同轴传动有:(7)根据提供的原动件转速为=1440r/min的交流电动机与课程设计要求,在-22-
的前提下,设计机器的生产率为20个/min,设计的凸轮滑块结构实现凸轮转动一圈完成一个健身球的检测,可以得到凸轮9的转速为:同时,齿轮4与凸轮7和凸轮8是同轴传动,故则 根据公式(4)可以得出:因此由上两式可以得出:根据1比72的比例关系,我们选取适当的皮带轮半径和齿轮齿数故我们得出:,,考虑到齿轮大小与传动的合理性,经过比较设计皮带传动结构与齿轮系传动结构的相应参数如下:表五:皮带轮参数带轮1带轮2皮带轮半径(mm)30240-22-
表六:各齿轮参数模数(mm)压力角(°)齿数(个)直径(mm)分锥角(°)齿轮13202060/齿轮232060180/齿轮33202060/齿轮432060180/直齿锥5,63204012090五、机构运动总体方案图运动方案简图:-22-
注:1,2,3,4—直齿轮5,6—锥齿轮7,8,9—凸轮 10—弹簧11—推杆 12—振荡器 13—进料槽14—料槽 15,16—推杆 17,18,19—收集箱六、总体布局图-22-'
您可能关注的文档
- 现代酒店星级服务培训计划书.doc
- 珊瑚休闲农庄创业计划书.doc
- 珍珠奶茶店创业计划书.doc
- 珞瑜路虹景立交工程钢箱梁专项施工计划书.doc
- 珠宝企业营销方案.doc
- 珠宝玉器经营投资方案策划.doc
- 珠宝类网站平台项目方案.docx
- 珠海航展营运部后勤营运方案.docx
- 班级建设方案.doc
- 琅坑溪大桥施工方案.doc
- 瑜伽馆策划书.doc
- 瑞优校园二手交易项目商业计划书.doc
- 甘肃中科祥老年人活动中心工程安全质量标准化工地方案计划书.doc
- 甘肃西部物流有限责任公司创业计划书.docx
- 甘肃观天下旅行社网站建设方案.doc
- 甜品书吧创业项目商业计划书.doc
- 甜品店具体策划方案.doc
- 甜品店商业计划书.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明