

- 268.00 KB
- 2022-04-22 11:17:53 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'第一章绪论概念:计算机图形学、图形、图像、点阵法、参数法、图形的几何要素、非几何要素、数字图像处理;计算机图形学和计算机视觉的概念及三者之间的关系;计算机图形系统的功能、计算机图形系统的总体结构。 第二章图形设备图形输入设备:有哪些。图形显示设备:CRT的结构、原理和工作方式。彩色CRT:结构、原理。随机扫描和光栅扫描的图形显示器的结构和工作原理。图形显示子系统:分辨率、像素与帧缓存、颜色查找表等基本概念,分辨率的计算 第三章交互式技术什么是输入模式的问题,有哪几种输入模式。 第四章图形的表示与数据结构自学,建议至少阅读一遍 第五章基本图形生成算法概念:点阵字符和矢量字符;直线和圆的扫描转换算法;多边形的扫描转换:有效边表算法;区域填充:4/8连通的边界/泛填充算法;adhm1
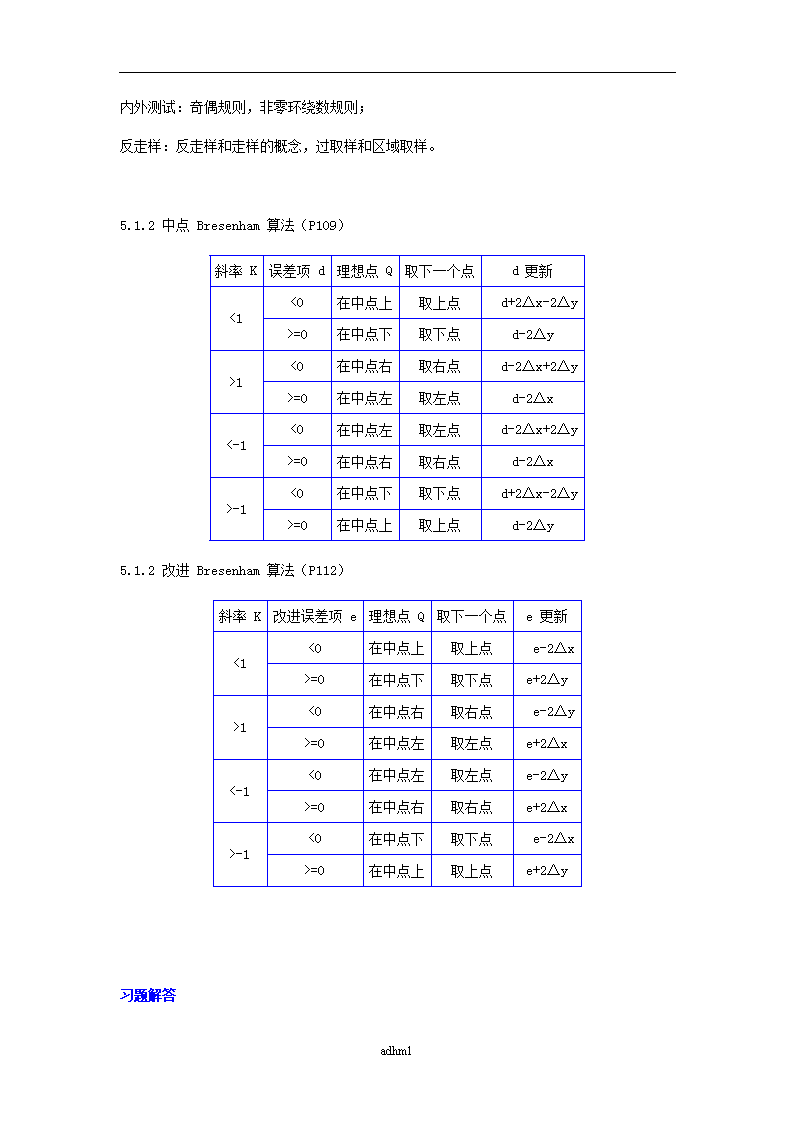
内外测试:奇偶规则,非零环绕数规则;反走样:反走样和走样的概念,过取样和区域取样。 5.1.2中点Bresenham算法(P109)斜率K误差项d理想点Q取下一个点d更新<1<0在中点上取上点 d+2△x-2△y>=0在中点下取下点d-2△y>1<0在中点右取右点 d-2△x+2△y>=0在中点左取左点d-2△x<-1<0在中点左取左点 d-2△x+2△y>=0在中点右取右点d-2△x>-1<0在中点下取下点 d+2△x-2△y>=0在中点上取上点d-2△y5.1.2改进Bresenham算法(P112)斜率K改进误差项e理想点Q取下一个点e更新<1<0在中点上取上点 e-2△x>=0在中点下取下点e+2△y>1<0在中点右取右点 e-2△y>=0在中点左取左点e+2△x<-1<0在中点左取左点e-2△y>=0在中点右取右点e+2△x>-1<0在中点下取下点 e-2△x>=0在中点上取上点e+2△y习题解答adhm1
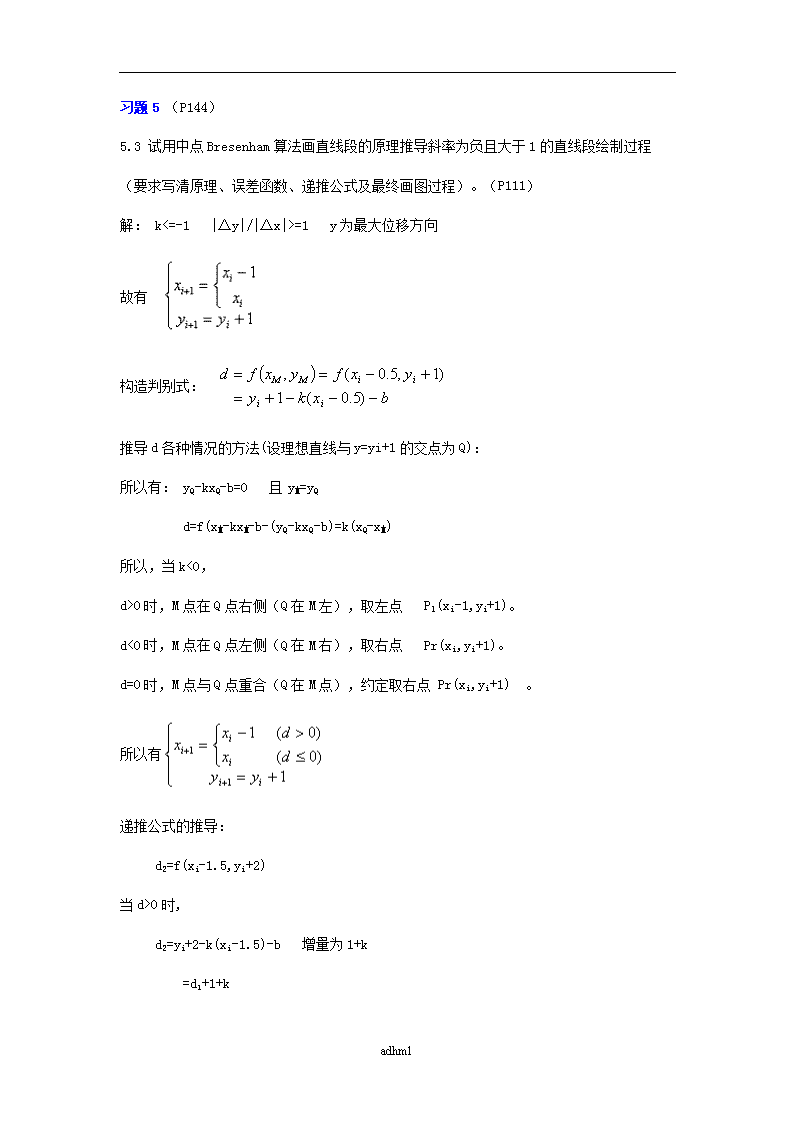
习题5(P144)5.3试用中点Bresenham算法画直线段的原理推导斜率为负且大于1的直线段绘制过程(要求写清原理、误差函数、递推公式及最终画图过程)。(P111)解:k<=-1 |△y|/|△x|>=1 y为最大位移方向故有 构造判别式: 推导d各种情况的方法(设理想直线与y=yi+1的交点为Q):所以有:yQ-kxQ-b=0 且yM=yQ d=f(xM-kxM-b-(yQ-kxQ-b)=k(xQ-xM)所以,当k<0,d>0时,M点在Q点右侧(Q在M左),取左点 Pl(xi-1,yi+1)。d<0时,M点在Q点左侧(Q在M右),取右点 Pr(xi,yi+1)。d=0时,M点与Q点重合(Q在M点),约定取右点Pr(xi,yi+1) 。所以有递推公式的推导: d2=f(xi-1.5,yi+2)当d>0时, d2=yi+2-k(xi-1.5)-b 增量为1+k =d1+1+kadhm1
当d<0时, d2=yi+2-k(xi-0.5)-b 增量为1 =d1+1当d=0时, 5.7利用中点Bresenham画圆算法的原理, 推导第一象限y=0到y=x圆弧段的扫描转换算法(要求写清原理、误差函数、递推公式及最终画图过程)。(P115)y坐标圆心角α误差项d理想点Q取下一个点d更新y=0y=x0°<=α<=45°<0在中点右取右点 d+2y+3>=0在中点左取左点d-2(y-x)+5y=xy=145°<=α<=90°<0在中点上取上点 d+2x+3>=0在中点下取下点d-2(x-y)+5解:在x=y到y=0的圆弧中,(R,0)点比在圆弧上,算法从该点开始。最大位移方向为y,由(R,0)点开始,y渐增,x渐减,每次y方向加1,x方向减1或减0。adhm1
设P点坐标(xi,yi),下一个候选点为右点Pr(xi,yi+1)和左点Pl(xi-1,yi+1),取Pl和Pr的中点M(xi-0.5,yi+1),设理想圆与y=yi+1的交点Q,构造判别式: d=f(xM,yM)=(x-0.5)2+(yi+1)2+R2当d<0时,M在Q点左方(Q在M右),取右点Pr(xi,yi+1)当d>0时,M在Q点右方(Q在M左),取左点Pl(xi-1,yi+1)当d=0时,M与Q点重合,约定取左点Pl(xi-1,yi+1)所以有:推导判别式:d>=0时,取左点Pl(xi-1,yi+1),下一点为(xi-1,yi+2)和(xi-2,yi+2) d<0时,取右点Pr(xi,yi+1),下一点为(xi,yi+2)和(xi-1,yi+2) d0=f(R-0.,1)=R2-R+0.25+1-R2=1.25-R5.11如图5-59所示多边形,若采用扫描转换算法(ET边表算法)进行填充,试写出该多边形的边表ET和当扫描线Y=4时的有效边表AET(活性边表)。(P125)adhm1
解: 1)边表ET表 x|yminymax1/knext 2)y=4时的有效边表AETxymax1/knext注意:水平线不用计算。5.22构造两个例子,一个是4-连通图,其边界是8-连通的,另一个是8-连通图,其边界是4-连通的。(P132)解:4-连通区域 8-连通区域adhm1
第六章二维变换及二维观察概念:齐次坐标,窗口,视区,二维观察流程,字符裁减的三种策略,外部裁减计算:二维几何变换直线裁减:区域编码法和梁友栋算法多边形裁减:逐边裁减法和双边裁减法6.1.3二维变换矩阵(P147)3阶二维变换矩阵子矩阵功能abpcdqlmsabcd比例旋转pq投影变换 lm 平移变换s整体比例6.2.3旋转变换(P149)adhm1
逆时针变换矩阵顺时针变换矩阵 cosθsinθ 0-sinθcosθ 0 0 0 1cosθ-sinθ 0sinθ cosθ 0 0 0 16.2.5相对任一参考点的二维几何变换(P155)例如:相对(xf,yf)点的旋转变换平移到坐标原点旋转角度θ反平移回原来位置1 0 00 1 0-xf-yf1 cosθsinθ0-sinθcosθ0 0 0 11 0 00 1 0xf yf1 习题6(P177)6.7求四边形ABCD绕P(5,4)旋转45度的变换矩阵和端点坐标,画出变换后的图形。(P147P148P155)解:变换的过程包括: 1)平移:将点P(5,4)平移至原点(0,0), 2)旋转:图形绕原点(0点)旋转45度, 3)反平移:将P点移回原处(5,4), 4)变换矩阵:平移—旋转—反平移adhm1
5)变换过程:四边形ABCD的规范化齐次坐标(x,y,1)*3阶二维变换矩阵 由旋转后四边形ABCD的规范化齐次坐标(x",y",1)可写出顶点坐标: A"(6.4,1.2)B"(7.1,4.7)C"(4.3,8.5)D"(2.2,1.2)6.15用梁友栋算法裁减线段AB,B点的坐标改为(-2,-1)(P170)解:以A(3,3)为起点,B(-2,-1)为终点所以有x1=3,y1=3,x2=-2,y2=-1,wxl=0,wxr=2,wyb=0,wyt=2构造直线参数方程:x=x1+u(x2-x1)0x1xx2 yA(3,3)3 C(7/4,2)2 adhm1
D(0,3/5)1-2 -1012 3xB(-2,-1) -1 x=x1+u(x2-x1) (0<=u<=1) y=y1+u(y2-y1) 把x1=3,y1=3,x2=-2,y2=-1代入得 x=3-5u y=3-4u计算各个p和q值有: p1=x1-x2=5 q1=x1-wxl=3 p2=x2-x1=-5 q2=wxr-x1=-1 p3=y1-y2=4 q3=y1-wyb=3 p4=y2-y1=-4 q4=wyt-y1=-1根据,uk=qk/pk算出 pk<0时:u2=1/5u4=1/4 pk>0时:u1=3/5u3=3/4 umax=MAX(0,u2,u4)=MAX(0,1/5,1/4)=1/4 (取最大值) umin=MIN(u1,u3,1)=MIN(3/5,3/4,1)=3/5 (取最小值)由于umax0时,将umin=3/5代入直线参数方程 x=x1+u(x2-x1) x=3+3/5*(-5)=0 y=y1+u(y2-y1) y=3+3/5*(-4)=3/5求出直线在窗口内部分的端点D(0,3/5)。所以,直线在窗口内部分的端点为C(7/4,2),D(0,3/5)。 第七章三维变换及三维观察概念:几何变换、投影变换、透视投影、平行投影、灭点平面几何投影的分类以及分类原则计算:三维几何变换、三视图7.2三维几何变换(P180)4阶三维变换矩阵子矩阵功能abcpdefqghirlmns abcdefghi比例旋转pqr透视投影 lmn 平移变换 s 整体比例 整体比例变换(P182) s>1时,整体缩小,如2表示2:1缩小。 s<1时,整体放大,如1/2表示1:2放大。adhm1
7.3.1正投影 1.主视图V(P191) 4阶三维变换矩阵y轴方向投影1 0 0 00 0 0 00 0 1 00 0 0 1 2.俯视图H4阶三维变换矩阵1 0 0 00 0 -1 00 0 0 00 0 -z0 1 z轴方向投影绕x轴旋转-90度z轴方向平移-11 0 0 00 1 0 00 0 0 00 0 0 11 0 0 00 cos(-90°)sin(-90°)00-sin(-90°)cos(-90°)00 0 0 11 0 0 00 1 0 00 0 1 00 0 -z0 1adhm1
3.侧视图W(P192)4阶三维变换矩阵 0 0 0 0 -1 0 0 0 0 0 1 0-x0 0 0 1 x轴方向投影绕z轴旋转90度x轴方向平移-10 0 0 00 1 0 00 0 1 00 0 0 10 cos90°sin90°00-sin90°cos90°00 0 1 00 0 0 1 1 0 0 0 0 1 0 0 0 0 1 0-x00 0 1习题7(P213)7.5求空间四面体关于点P(2,-2,2)整体放大2倍的变换矩阵, 画出变换后的图形。(P182)解:关于点P(2,-2,2)整体放大两倍,变换矩阵:点P(2,-2,2)平移至原点--比例变换放大两倍--反平移回点P(2,-2,2)。adhm1
变换过程:空间四面体ABCD的规范化齐次坐标(x,y,z,1)*4阶三维比例变换矩阵 空间四面体ABCD的齐次坐标(x",y",z",1/2)转换成规范化齐次坐标顶点 x y z 1ABCD 2,2,-2,1 2,6,-2,1-2,6,-2,1 2,6,2,1 由比例变换后规范化齐次坐标(x",y",z",1)可写出顶点坐标: A"(2,2,-2)B"(2,6,-2)C"(-2,6,-2)D"(2,6,2)7.7求空间四面体ABCD三视图的变换矩阵(平移矢量均为1),并作出三视图。(P180)解: 1)主视图V(P191) 空间四面体ABCD的规范化齐次坐标矩阵*Y轴方向投影矩阵(不需要平移)adhm1
2)俯视图H(P191) Z轴方向投影矩阵*绕X轴旋转-90度矩阵*Z轴方向平移-1矩阵 空间四面体ABCD的规范化齐次坐标矩阵*投影变换矩阵(可以直接写出) 3)侧视图W(P192) X轴方向投影矩阵*绕Z轴旋转90度矩阵*X轴方向平移-1矩阵 空间四面体ABCD的规范化齐次坐标矩阵*投影变换矩阵(可以直接写出) 4)画图注意:三个图画在同一坐标系中,点与点的连接关系以及直线的可见性问题。 adhm1
试题分析《计算机图形学》考试试题一、填空2.帧缓存(P42):(1024*768*8/8)/1024=768kB 颜色位面数(P43):24 总颜色数:(2^8)^3=2^24=(2^4)*(2^20)=16MB二、名词解释三、简答与计算3.边标志算法(P128)解:打标记:x1,x2,x3,x4 填充:x1与x2,x3与x4扫描线区间的像素点。5.正则集合运算(P88)解:通常意义下的集合求交运算:C=A∩B 有一条弧立边 正则集合运算:C=A∩*B 无弧立边四、计算作图题1.中点Bresenham算法(P109)斜率K误差项d理想点Q取下一个点d更新<1<0在中点上取上点 d+2△x-2△y>=0在中点下取下点d-2△y解:直线斜率:k=(6-1)/(9-1)=5/8 00取下点d-2△y=-632<0取上点d+2△x-2△y=043=0取下点d-2△y=-1053<0取上点d+2△x-2△y=-464<0取上点d+2△x-2△y=275>0取下点d-2△y=-885<0取上点d+2△x-2△y=-296 2.改进的有效边表算法(P125)解:1)边表ET:交点x(最小y坐标ymin)x|yminymax1/knext x坐标1CB边CA边2→65-4/3 →69-2/7/34BA边5→29-1/2/6789 2)y=4的有效边表AET:交点xxymax1/knext adhm1
y=4|与CB边相交┗→3.35-4/3 ┓┏—————————┛|与CA边相交┗→5.49-1/2 / 3)y=4时的填充交点对:(3.3,4)(5.4,4)3.求三角形绕B点(2,5)旋转θ的变换矩阵。 求三角形绕B点顺时针旋转90度后各端点坐标。(P125)解:1)三角形绕B点(2,5)旋转θ的变换矩阵 T=Tt*TR*Tt-1平移到坐标原点旋转角度θ反平移回原来位置 1 0 0 0 1 0-2-5 1 cosθsinθ0-sinθcosθ0 0 0 11 0 00 1 02 5 1 2)三角形绕B点顺时针旋转90度的变换矩阵,θ=-90° T=Tt*TR*Tt-1平移到坐标原点旋转角度θ反平移回原来位置 1 0 0 0 1 0-2-5 1cos90° -sin90° 0sin90° cos90° 0 0 0 11 0 00 1 02 5 1 变换过程:三角形ABC的规范化齐次坐标(x,y,1)*3阶二维变换矩阵 P=P*Tadhm1
得到三角形ABC变换后的规范化齐次坐标(x",y",1)顶点 x y 1ABC 4.6 2 1 2 5 1 0 -1 1 可以写出顶点坐标:A"(4.6,2)B"(2,5)C"(0,-1) 4.用编码裁剪算法裁剪线段P1(0,2)P2(3,3)。要求写出:(164) 1)窗口边界划分的9个区间的编码原则; 2)线段端点的编码; 3)裁剪的主要步骤; 4)裁剪的输出结果。解:线段P1(0,2)P2(3,3)的编码裁剪y10011000101040001P2(3,3)0000S 00103P1(0,2)210101010001100 1 2 3 4 x 1)窗口边界划分的9个区间的编码原则;编码D3D2D1D0窗口外上边top下边bottom右边right左边left条件y>wytywxrx1的直线段的扫描转换算法。(P112)斜率K改进误差项e理想点Q取下一个点e更新>1<0在中点右取右点 e-2△y>=0在中点左取左点e+2△x解:k>1 y为最大位移方向 故有yi+1=yi+1xi+1xi+1(d>0.5 取右点Pr)adhm1
=xi (d<=0.5取左点Pl) 误差项d的初值为0 d=d+1/k 当x方向走一步d-1 令e=d-0.5yi+1=yi+1xi+1=xi+1(e>0 取右点Pr)xi (e<=0取左点Pl) 改进误差项e的初值为e=d-0.5=0-0.5=-0.5; 避免计算小数和除法,改进误差项e用2e△y。 算法步骤: 1)输入:Po(xo,yo) P1(x1,y1); 2)计算初值:△x,△y,e=2e△y=2*(-0.5)△y=-△y,x=xo,y=yo。 3)画点:P(x,y) 4)改进误差项e更新:斜率K改进误差项e理想点Q取下一个点e更新>1<0在中点右取右点 e-2△y>=0在中点左取左点e+2△xadhm1'
您可能关注的文档
- 西方经济学简明教程第七版习题答案.doc
- 西方经济学课后题答案.doc
- 西方财务会计课后习题答案.doc
- 西电《移动通信》第四版 李建东 郭梯云 习题答案.doc
- 观测保障5-《气象仪器与观测方法指南(第六版)》练习题答案-尤竞飞.doc
- 解析几何,吕林根,课后习题解答一到五.doc
- 计算方法习题集及答案.doc
- 计算方法的课后答案.doc
- 计算机二级《笔试宝典》习题答案与详解.doc
- 计算机图形学答案.doc
- 计算机图形学课后题答案(第二版)--许长青、许志闻.pdf
- 计算机基础 习题答案.doc
- 计算机控制技术及其应用(丁建强 任晓 卢亚萍)课后答案.docx
- 计算机操作系统(第3版)课后习题答案(完整版).doc
- 计算机操作系统(第四版)汤小丹课后答案完整版.docx
- 计算机操作系统教程_张尧学(第3版)【课后练习答案、复习资料】.doc
- 计算机操作系统课后作业答案.doc
- 计算机教材全部习题答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明