

- 1.51 MB
- 2022-04-22 11:42:14 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'课后答案网www.khdaw.com习题解答2-12-22-32-42-52-62-72-82-92-102-112-122-132-142-152-162-172-18
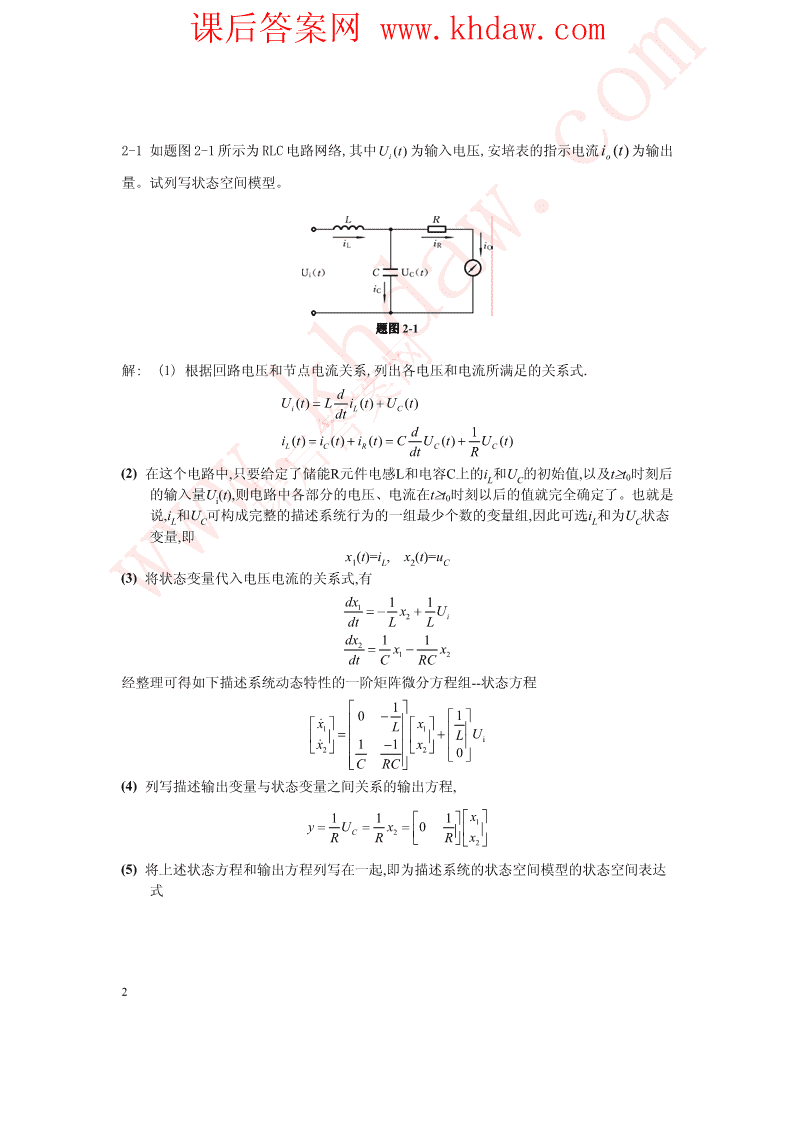
课后答案网www.khdaw.com2-1如题图2-1所示为RLC电路网络,其中Ut()为输入电压,安培表的指示电流i(t)为输出io量。试列写状态空间模型。题图2-1解:(1)根据回路电压和节点电流关系,列出各电压和电流所满足的关系式.dUtLitUt()=+()()iLCdtd1itititCUt()=+=()()()+Ut()LCRCCdtR(2)在这个电路中,只要给定了储能R元件电感L和电容C上的iL和UC的初始值,以及t≥t0时刻后的输入量Ui(t),则电路中各部分的电压、电流在t≥t0时刻以后的值就完全确定了。也就是说,i和U可构成完整的描述系统行为的一组最少个数的变量组,因此可选i和为U状态LCLC变量,即x(t)=i,x(t)=u1L2C(3)将状态变量代入电压电流的关系式,有dx111=−x+U2idtLLdx112=−xx12dtCRC经整理可得如下描述系统动态特性的一阶矩阵微分方程组--状态方程⎡⎤10−⎡1⎤⎡⎤xx&⎢⎥L⎡⎤⎢⎥11=+⎢⎥⎢⎥⎢L⎥Ui⎣⎦xx&22⎢⎥11−⎣⎦⎢⎥⎣0⎦⎢⎥⎣⎦CRC(4)列写描述输出变量与状态变量之间关系的输出方程,11⎡⎤1⎡x1⎤yUx===0⎢⎥C2⎢⎥RR⎣⎦R⎣x2⎦(5)将上述状态方程和输出方程列写在一起,即为描述系统的状态空间模型的状态空间表达式2
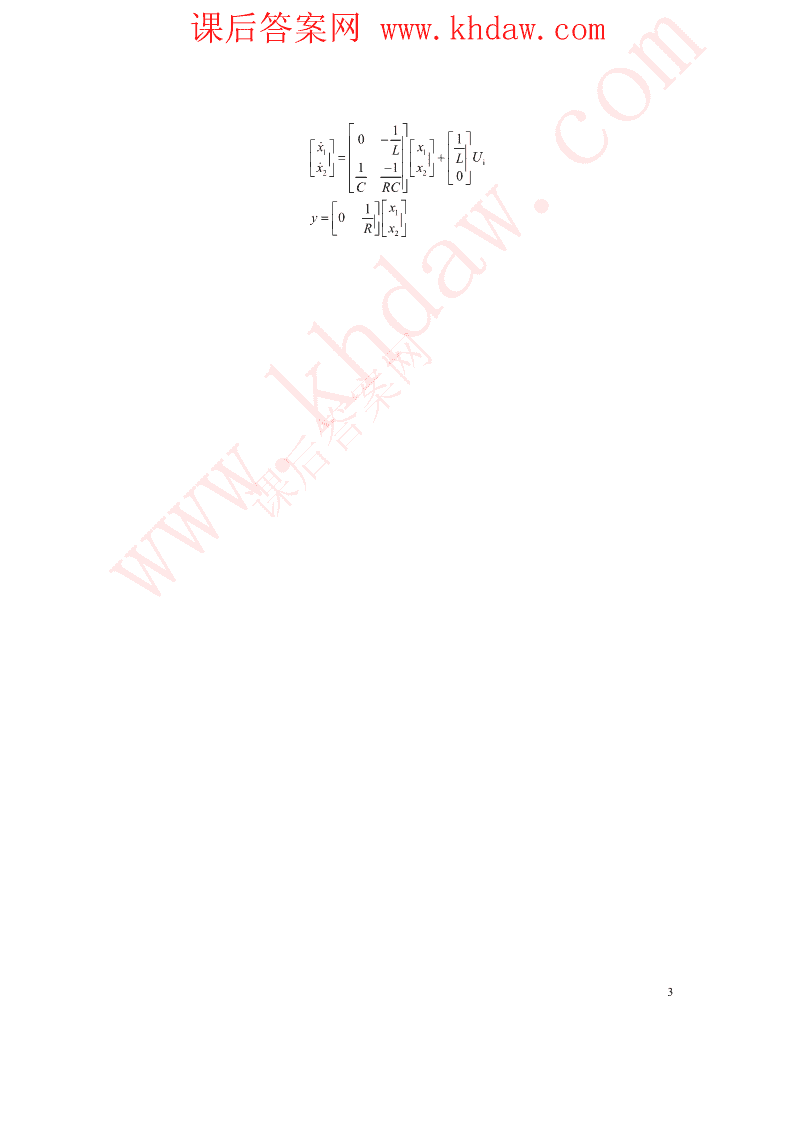
课后答案网www.khdaw.com⎡⎤10−⎡1⎤⎡⎤xx&⎢⎥L⎡⎤⎢⎥11=+⎢⎥⎢⎥⎢L⎥Ui⎣⎦xx&22⎢⎥11−⎣⎦⎢⎥⎣0⎦⎢⎥⎣⎦CRC⎡⎤1⎡⎤x1y=0⎢⎥⎢⎥⎣⎦R⎣⎦x23
课后答案网www.khdaw.com2-2如题图2-2所示为RLC电路网络,其中vt()为输入电压,vt()为输出电压。试列写状态12空间模型。题图2-2解:(1)根据回路电压和节点电流关系,列出各电压和电流所满足的关系式.⎧di⎛⎞duLC⎪LR+−=⎜⎟iCu11L⎪⎝⎠ddtt⎨⎪dduuCC⎛⎞uR+=CRiC⎜⎟−⎪CL21⎩ddtt⎝⎠(2)选择状态变量.状态变量的个数应为独立一阶储能元件(如电感和电容)的个数.对本题x1(t)=iL,x2(t)=uC(3)将状态变量代入电压电流的关系式,经整理可得如下描述系统动态特性的一阶矩阵微分方程组--状态方程⎡⎤−−RRR121⎢⎥⎡1⎤⎡⎤xx&()RRLRRL++()⎡⎤11=+⎢⎥1212⎢L⎥u⎢⎥⎢⎥1⎣⎦xx&22⎢⎥R1−1⎣⎦⎢0⎥⎢⎥⎣⎦⎣⎦()RRCRRC++()1212(4)列写描述输出变量与状态变量之间关系的输出方程,⎛⎞duC⎡⎤RR12R1⎡⎤x1yuRiC==21⎜⎟L−=RxC1()12−x&=⎢⎥⎢⎥⎝⎠d(tR⎣⎦12++R)(R12R)⎣⎦x2(5)将上述状态方程和输出方程列写在一起,即为描述系统的状态空间模型的状态空间表达式⎡⎤−−RRR121⎢⎥⎡1⎤⎡⎤xx&()RRLRRL++()⎡⎤11=+⎢⎥1212⎢L⎥u⎢⎥⎢⎥1xx&⎢⎥R−1⎢⎥⎣⎦221⎣⎦0⎢⎥⎣⎦⎣⎦()RRCRRC++()1212⎡⎤RR12R1⎡⎤x1y=⎢⎥⎢⎥⎣⎦()RR12++()RR12⎣⎦x24
课后答案网www.khdaw.com2-3设有一个弹簧-质量-阻尼器系统,安装在一个不计质量的小车上,如题图2-3所示。u和y为分别为小车和质量体的位移,k、b和m分别为弹簧弹性系数、阻尼器阻尼系数和质量体质量阻尼器。试建立u为输入,y为输出的状态空间模型。题图2-3解:下面推导安装在小车上的弹簧-质量-阻尼器系统的数学模型。假设t<0时小车静止不动,并且安装在小车上面的弹簧-质量-阻尼器系统这时也处于静止状态(平衡状态)。在这个系统中,ut()是小车的位移,并且是系统的输入量。当t=0时,小车以定常速度运动,即u&=常量。质量的位移y()t为输出量(该位移是相对于地面的位移)。在此系统中,m表示质量,b表示黏性摩擦系数,k表示弹簧刚度。假设阻尼器的摩擦力与y&&−u成正比,并且假设弹簧为线性弹簧,即弹簧力与yu−成正比。对于平移系统,牛顿第二定律可以表示为:ma=∑F式中,m为质量,a为质量加速度,∑F为沿着加速度a的方向并作用在该质量上的外力之和。对该系统应用牛顿第二定律,并且不计小车的质量,我们得到:2dy⎛⎞dydumb=−−−−⎜⎟k()yu2dt⎝⎠dtdt2dydydu即:mbk++=+ybku2dtdtdt这个方程就是该系统的数学模型。对这个方程进行拉普拉斯变换,并且令初始条件等于零,得到:2(ms+bs+k)Y(s)=(bs+k)U(s)取Y(s)与U(s)之比,求得系统的传递函数为:Ys()bsk+Gs()==2Us()msbsk++下面我们来求这个系统的状态空间模型。首先将该系统的微分方程bkbk&&yyyu++=+&&ummmm与下列标准形式比较:5
课后答案网www.khdaw.com&&yayaybububu++=++&&&&12o12得到:bkbka=,a=,b=0,b=,b=12o12mmmm即而得到:β==b000bββ=−ba=1110m2kb⎛⎞ββ=−−baaβ=−⎜⎟221120mm⎝⎠并定义:xyuy=−=β10bx=−=−xux&&βu2111m可得到:bxxux&=+=+βu1212m2kbkb⎡⎛⎞⎤x&=−axax−+βu=−x−x+⎢−⎜⎟⎥u22112212mmmm⎢⎣⎝⎠⎥⎦输出方程为:yx=1即:⎡b⎤⎡⎤01⎢⎥⎡⎤xx&11=+⎢⎥⎡⎤⎢m⎥⎢⎥kb⎢⎥2uxx&⎢⎥−−⎢kb⎛⎞⎥⎣⎦22⎣⎦⎣⎦⎢⎥mm⎢−⎜⎟⎥⎣mm⎝⎠⎦⎡⎤x1y=[]10⎢⎥⎣⎦x26
课后答案网www.khdaw.com2-4题图2-4为登月舱在月球软着陆的示意图。其中,m为登月舱质量,g为月球表面重力常数,−km&项为反向推力,k为常数,y为登月舱相对于地球表面着陆点的距离。现指定状态变量组x=y,x=y&和x=m,输入变量u=m&,试列出系统的状态方程。123题图2-4解:本题属于由物理系统建立状态空间描述的基本题。对给定力学系统,储能元件质量的相应变量即位置、速度和质量(本题中他也是随时间改变的),可被取为状态变量组x=y,x=y&和x=m。123基此,利用力学定律并考虑到输入变量u=m&,先来导出xyx&&==12kgmgkx&&==ym&&−=−x+u23mmxx33xmu&&==3在将此方程组表为向量方程,就得到系统的状态方程:⎡x&1⎤⎡010⎤⎡x1⎤⎡0⎤⎢⎥⎢g⎥⎢⎥⎢k⎥⎢x&2⎥=⎢00−x3⎥⎢x2⎥+⎢x3⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣x&3⎦⎢⎣000⎥⎦⎣x3⎦⎢⎣1⎥⎦且由状态方程形式可以看出,给定力学系统为非线性系统。7
课后答案网www.khdaw.com2-5某磁场控制的直流电动机的简化原理图如题图2-5所示,其中电动机轴上的负载为阻尼摩擦,其摩擦系数为f;电动机轴上的转动惯量为J。设输入为电枢电压ua和激磁电压uf,输出为电机转角θ,试列出系统的状态空间模型。题图2-5解设电动机的铁芯工作在非饱和区。分析题图2-5所描述的电动机转速控制系统,可以写出电动机的主回路、励磁回路电压方程和轴转动运动方程为uR=+iEaaaadifuR=+iLffffdt2ddθθMJ=+f2ddtt式中,Ea和M分别为如下电动机电枢电势和电动机转矩,且ddθθEC=Φ=ki,M=Φ=Cikiiaeefmamfaddtt式中,Ce和Cm分别为电动机的电枢电势常数和转矩常数;Φ为磁场的磁通量,其正比于励磁回路电流if;ke和km分别为比例常数。因此,主回路、励磁回路电压方程和轴转动运动可记为⎧dθuR=+iki⎪aaaefdt⎪⎪dif⎨uRff=+iLff(2-13)⎪dt⎪2ddθθ⎪kii=+Jfmfa2⎩ddtt对于上述微分方程组,若已知电枢电流if(t)、角位移θ(t)及其导数dθt)(/dt在初始时刻t0的值,以及电枢电压ua和励磁回路电压uf,则方程组有惟一解。因此,可以选择状态变量为d()θtxtit()===(),xt()θ(),txt()123fdt因此,由微分方程组(2-13)可得系统的状态方程为8
课后答案网www.khdaw.com⎧Rf1⎪xxu&=+-11fLL⎪ff⎪⎨xx&=23⎪kkf⎛⎞u−kxxf⎪x&==mmxi--xxae13x3131a⎜⎟3⎪JJJRJ⎩⎝⎠a输出方程为y=θ=x2由上述状态方程和输出方程可得系统的非线性状态空间模型为⎧Rf1⎪xxu&=+-11fLL⎪ff⎪⎨xx&=23⎪⎪=−kkmmke2fx&uxxx-x31a133⎪JRaaJRJ⎩yx=29
课后答案网www.khdaw.com2-6题图2-6为一化学反应器,它是一个均匀、连续流动单元,其中发生如下反应速率常数为k的一级吸热反应kA→B该化工反应生产过程为:温度为常量θf,含A物质浓度为常量CAf的料液以Q(t)的流量进入反应器;假定流出的液体的流量也为Q(t),保持单元内液体体积为V;为了使化学反应向右进行,用蒸汽对反应器内的溶液进行加热,蒸汽加热量为q(t)。试以料液的流量Q(t)和蒸汽加热量q(t)为输入,容器内的液体的温度θ(t)和物质B的浓度CB(Bt)为输出,建立状态空间模型。题图2-6参见2.2小节例题10
课后答案网www.khdaw.com2-7.将以下系统输入输出方程变换为状态空间模型。(1)&&&y+++=2635&&yyy&u(2)23&&&y−yuu=−&&&(3)&&&y+++=+++4522&&yyyuuuu&&&&&&&2解(1)由所求的系统输入输出方程,有a1=2,a2=6,a3=3,b=5当选择输出y及其1阶、2阶导数为状态变量时,可得状态空间模型为⎡010⎤⎡0⎤⎢⎥⎢⎥xx&=+0010u⎢⎥⎢⎥⎢⎣−−−362⎥⎢⎦⎣5⎥⎦yx=[100](2)先将方程变换成y的首项的系数为1,对方程两边除以2,得311&&&yyu−=−&&&u222由所求的系统输入输出方程,有a1=0,a2=0,a3=-3/2,b0=1/2,b1=0,b2=0,b3=-1/2,故由式(2-17)可得β==b1/200ββ=−ba=01110ββ=−−baaβ=0221120ββ=−−−=baaaββ1/433122130因此,当选择状态变量⎧1xyuyu=−=−β⎪102⎪⎪1⎨xyuuyu=−−=−&&ββ&&210⎪2⎪1⎪x=−−−=−&&yuuuyβββ&&&&&u&&3210⎩2时,可写出状态空间模型为11
课后答案网www.khdaw.com⎡010⎤⎡⎤0⎢⎥⎢⎥xx&=+0010u⎢⎥⎢⎥⎢⎣3/200⎥⎢⎥⎦⎣⎦1/41yx=+[100]u2(3)由所求的系统输入输出方程,有a1=4,a2=5,a3=2,b0=2,b1=1,b2=1,b3=2,故由式(2-17)可得β==b200ββ=−ba=−71110ββ=−−baaβ=19221120ββ=−−−baaaββ=−4333122130因此,当选择状态变量⎧xyuyu=−=−β210⎪⎨xyuuyuu=−−=+−&&ββ&&72210⎪⎩x=−−−=−+−&&yuuuyuuβββ&&&&&197&2u&&3210时,可写出状态空间模型为⎡010⎤⎡⎤−7⎢⎥⎢⎥xx&=+00119u⎢⎥⎢⎥⎢⎣−−−254⎥⎢⎥⎦⎣⎦−43yx=+[100]2u12
课后答案网www.khdaw.com2-8将下列传递函数转换为状态空间模型2221ss++840s+21s+(1)Gs()=(2)Gs()=322sss+++6116ss+56+3(s+5)(3)Gs()=2(3ss++)(1)32解(1)由系统特征多项式s+6s+11s+6,可求得系统的极点为s1=-1,s2=-2,s3=-3于是有k1k2k3G(s)=++s−s1s−s2s−s3其中,kG=+=[()(1)]ss1211s=−kG=[()(2)]ss+=−1222s=−kG=+=[()(3)]ss233s=−故当选择状态变量为G(s)分式并联分解的各个一阶惯性环节的输出,则可得状态空间模型为⎡−100⎤⎡1⎤⎢⎥⎢⎥xx&=−020+1u⎢⎥⎢⎥⎢⎣003−⎥⎢⎦⎣1⎥⎦yx=−[12122](2)对本题,先用长除法求出严格真有理函数如下2ss++21−−35s%Gs()==1+=1+Gs()22ss++56ss++562由系统特征多项式ss++56,可求得系统的极点为s1=-2,s2=-3于是有kk12Gs()1=++s−sss−12其中,kG=+=[()(2)]%ss112s=−kG=[()(3)]%ss+=−423s=−故当选择状态变量为G(s)分式并联分解的各个一阶惯性环节的输出,则可得状态空间模型为13
课后答案网www.khdaw.com⎡⎤−20⎡1⎤xx&=+⎢⎥⎢⎥u⎣⎦031−⎣⎦yx=−+[14]u2(3)由系统特征多项式(3ss++)(1),可求得系统的极点为s1=s2=-3,s3=-1于是有k11k12k31G(s)=++2s−ss−s(s−s1)13其中2kG=+=[()(3)]ss−3,11s=−2d2kG=+[()(3)]ss=−3,12s=−2dskG=+=[()(1)]ss3。31s=−1故当选择状态变量为G(s)分式串-并联分解的各个一阶惯性环节的输出,可得状态空间模型为⎡−310⎤⎡0⎤⎢⎥⎢⎥xx&=−⎢030⎥⎢+1⎥u⎢001−⎥⎢1⎥⎣⎦⎣⎦yx=−−[333]14
课后答案网www.khdaw.com2-9试求题图2-9所示系统的模拟结构图,并建立其状态空间模型。U(s)K1Kps+K11Kbθ(s)Ks+Ks2+_p1+_+_J1sJ2sKns题图2-9解:系统方框图变换成:u1x11x211x3K1x41x5θKb1KK1J+_p_s_s_1sJ2ssKx611KKKpnps⎧x&=+AxBu则状态空间表达式⎨中:⎩yC=+xDu⎡−k1/kp000−k1/kp0⎤⎡k/k⎤⎢⎥1pk0−k000⎢⎥⎢11⎥0⎢⎥⎢k/J/1J−k/J00−k/J⎥p11p1n1⎢0⎥A=⎢⎥B=⎢⎥,⎢00kb/J2000⎥⎢0⎥⎢000100⎥⎢0⎥⎢⎥⎢⎥⎢⎣001000⎥⎦⎢⎣0⎥⎦C=[000010],D=015
课后答案网www.khdaw.com2-10给定题图2-10所示的一个系统方框图,输入变量和输出变量分别为u和y,试列出系统的一个状态空间模型。题图2-10解:首先,定出状态方程。对此,需将给定方块图化为图示规范方块图,并按图中所示把每个一阶环节的输出取为状态变量x,,,xxx。进而,利用每个环节的因果关系,可以导出变换1234域变量关系式:10xˆˆ12()su=−{}()s5⎡⎣xˆ()s−xˆ3()s⎤⎦s+22xˆˆ2()s=−{}xsxsxsxs1234()ˆ()+ˆ()+ˆ()s2xˆˆ31()s=−{}xsxsxsxs()ˆ2()+ˆ3()+ˆ4()s+11xˆˆ42()sx=−{}()sxˆ3()ss+3基此,可以导出变换域状态变量方程:sxsˆˆˆˆˆ1123()=−25xs()−05xs()+01xs()+0us()sxsˆˆˆˆˆ21234()=−++2222xs()xs()xs()xs()sxsˆˆˆˆˆ31234()=−++22xs()xsxs()()2xs()sxsˆˆˆˆ42()=−−23xsxsxs()34()()−1将上述关系式组取拉普拉斯反变换,并运用L{sxs()}=x&,就定义此方块图的状态变量方ii程:x&=−25xxx−05+01+0u1123xxxxx&=−++222221234xxxxx&=−++22231234xxxx&=−−3423416
课后答案网www.khdaw.com再将上述方程组表为向量方程,得到此方块图的状态方程:⎡⎤xx&11⎡−−250500⎤⎡⎡⎤10⎤⎢⎥⎢⎥⎢⎢⎥⎥xx&2-2220⎢⎥22=+⎢⎥⎢⎢⎥⎥u⎢⎥xx&⎢2-212⎥⎢⎢⎥0⎥33⎢⎥⎢⎥⎢⎢⎥⎥⎢⎥⎣⎦xx&44⎣01-1-3⎦⎣⎢⎥⎣⎦0⎦进而,定出输出方程。对此,由方块图中相应环节显示的因果关系,可直接导出此方块图的输出方程:⎡x1⎤⎢⎥xy=−[]0110⎢2⎥⎢x⎥3⎢⎥⎢⎣x4⎥⎦17
课后答案网www.khdaw.com2-11已知系统的状态空间模型为⎡300⎤⎡⎤10⎢⎥⎢⎥xx&=+15220u⎢⎥⎢⎥⎢⎣021⎥⎢⎥⎦⎣⎦05⎡⎤301yx=⎢⎥⎣⎦620现用x%=Px进行状态变换,其变换矩阵为⎡100⎤⎢⎥P=020⎢⎥⎢⎣003⎥⎦试写出状态变换后的状态方程和输出方程。解本题的线性变换为x%=Px,因此相应的各个矩阵的变换公式为−−11AP%%==APBP,,,%%BCC=PDD=P的逆矩阵为⎡100⎤−1⎢⎥P=01/20⎢⎥⎢⎣001/3⎥⎦因此有⎡300⎤⎡10⎤AP%==AP−1⎢254/3⎥⎢BP%=B=40⎥⎢⎥⎢⎥⎢⎣031⎥⎢⎦⎣015⎥⎦⎡⎤301/3CC%==P−1⎢⎥⎣⎦610~故系统在新的状态变量x下的状态空间模型为⎡300⎤⎡⎤10xx%%&=+⎢254/3⎥⎢⎥40u⎢⎥⎢⎥⎢⎣031⎥⎢⎥⎦⎣⎦015⎡⎤301/3yx=⎢⎥%⎣⎦61018
课后答案网www.khdaw.com2-12求下列各方阵A的特征值、特征向量和广义特征向量。⎡122⎤⎡13⎤⎢⎥(1)A=⎢⎥(2)A=⎢212⎥⎣⎦02⎢⎣221⎥⎦⎡⎤010⎡010⎤⎢⎥⎢⎥(3)A=001(4)A=001⎢⎥⎢⎥⎢⎥⎣⎦254−⎢⎣−81−−26⎥⎦解(1)由特征方程|λI-A|=0可求得系统的特征值为λ1=1,λ2=2计算对应于λ1=1的特征向量。按定义有(λ1I-A)v1=0将A、λ1和v1代入上式,有⎡⎤03−⎡⎤v11⎢⎥⎢⎥=0⎣⎦01−⎣⎦v12该方程组有无穷组解。由于n-rank(λ1I-A)=1,即特征向量解空间为1维,其通解式为TTvv11==[100][v11]令v11=1,可得如下独立的特征向量Tv1=[10]再计算对应于重特征值λ2=2的特征向量。按定义有(λ2I-A)v2=0将A、λ2和v2代入上式,有⎡⎤13−⎡⎤v21⎢⎥⎢⎥=0⎣⎦00⎣⎦v22由于n-rank(λ2I-A)=1,该方程组有特征向量解空间为1维,其通解式为TTvvv22==[122][3vv2222]因此,令v22=1,解之得Tv2=[31]19
课后答案网www.khdaw.com(2)由特征方程|λI-A|=0可求得系统的特征值为λ1=λ2=-1,λ3=5即-1为系统的二重特征值,其代数重数为2。计算对应于二重特征值-1的特征向量。按定义有(λ1I-A)v1=0将A、λ1和v1代入上式,有⎡⎤−−−222⎡⎤v11⎢⎥⎢⎥−222−−v=0⎢⎥⎢⎥12⎢⎥−−−222⎢⎥v⎣⎦⎣13⎦由于n-rank(λ1I-A)=2,该方程组有特征向量解空间为2维,故特征向量解空间为2维,独立的特征向量数为2。解该方程,可得特征向量的通解式为TTvvvv11==[]11223[]vv1112−()vv111+2因此,令v11=1,v12=0或1,解之得TTv1=−[101]和v2=−[112]即重特征值2有两个线性独立的特征向量,故该重特征值的几何重数亦为2。再计算对应于重特征值λ3=5的特征向量。按定义有(λ3I-A)v2=0将A、λ3和v3代入上式,有⎡⎤422−−⎡⎤v31⎢⎥⎢⎥−242−=v0⎢⎥⎢⎥32⎢⎥−−224⎢⎥v⎣⎦⎣33⎦该方程组有无穷组解。由于n-rank(λ1I-A)=1,即特征向量解空间为1维,其通解式为TTvvvv33==[]13233[vvv313131]令v31=1,可得如下独立的特征向量Tv1=[111](4)由特征方程|λI-A|=0可求得系统的特征值为λ1=λ2=1,λ3=2由于矩阵为友矩阵,因此对应于λ1=λ2=1的特征向量和广义特征向量分别为20
课后答案网www.khdaw.comTT2vv1,1==1⎡⎤⎣⎦11λλ11=[]11TTv1,2==[]012λ1[]012对应于λ3=2的特征向量和广义特征向量分别为TT2v33==⎡⎤⎣⎦11λλ3[]24(4)由特征方程|λI-A|=0可求得系统的特征值为λ1=λ2=λ3=-2由于矩阵为友矩阵,因此对应于λ1=λ2=λ3=-2的特征向量和广义特征向量分别为TT2vv1,1==1⎡⎤⎣⎦11λλ11=−[]24TTv1,2==[]012λ1[]014−TTv1,3==[]001[]00121
课后答案网www.khdaw.com2-13试将下列状态方程变换为约旦规范形(对角线规范形)⎧−⎡⎤211−⎡7⎤⎪⎢⎥⎢⎥⎪xx&=−⎢⎥010+⎢2u⎡882−−⎤⎡⎤23⎥(1)⎪⎨⎢⎥⎣⎦021⎢⎣3⎥⎦(2)xx&=−−+⎢432⎥⎢⎥15u⎢⎥⎢⎥⎪⎡⎤001⎢⎣341−⎥⎢⎥⎦⎣⎦71⎪y=⎢⎥x⎪⎩⎣⎦120解(1)先求A的特征值。由特征方程|λI-A|=0可求得系统的特征值为λ1=-1,λ2=1,λ3=2求特征值所对应的状态向量。由前述方法可求得特征值λ1,λ2,和λ3所对应的特征向量分别为τττp1=[01-1],p2=[101],p3=[-100]-1取系统的特征向量组成线性变换矩阵P并求逆矩阵PP,即有⎡⎤⎡011−010⎤⎢⎥⎢−1⎥PP==100,011⎢⎥⎢⎥⎢⎥⎢⎣⎦⎣−−110111⎥⎦~~~计算A、B和C⎡−100⎤⎡2⎤APA%==−−11P⎢010,⎥⎢BPB%==5⎥⎢⎥⎢⎥⎢⎣002⎥⎢⎦⎣−2⎥⎦⎡⎤−110CC%==P⎢⎥⎣⎦211−~故系统在新的状态变量x下的状态空间模型为⎡−100⎤⎡⎤2xx%%&=+⎢010⎥⎢⎥5u⎢⎥⎢⎥⎢⎣002⎥⎢⎥⎦⎣⎦−2⎡⎤−110yx=⎢⎥%⎣⎦211−(2)先求A的特征值。由特征方程|λI-A|=0可求得系统的特征值为λ1=-1,λ2=1,λ3=222
课后答案网www.khdaw.com求特征值所对应的状态向量。由前述方法可求得特征值λ1,λ2,和λ3所对应的特征向量分别为τττp1=[-4-3-2],p2=[321],p3=[211]-1取系统的特征向量组成线性变换矩阵P并求逆矩阵PP,即有⎡⎤⎡−−432111−⎤⎢⎥⎢−1⎥PP=−321,=102−⎢⎥⎢⎥⎢⎥⎢⎣⎦⎣−−211121⎥⎦~~计算A、B⎡⎤100⎡−63−⎤APA%==−−11P⎢⎥020,BPB%==⎢−121⎥⎢⎥⎢⎥⎣⎦⎢⎥003⎣⎢7−6⎦⎥~故系统在新的状态变量x下的状态空间模型为⎡100⎤⎡−−63⎤⎢⎥⎢⎥xx%%&=+020−121u⎢⎥⎢⎥⎢⎣003⎥⎢⎦⎣7−6⎥⎦23
课后答案网www.khdaw.com2-14状态空间模型为⎡010⎤⎡0⎤⎢⎥⎢⎥xx&=−−230+1u⎢⎥⎢⎥⎢⎣−−113⎥⎢⎦⎣2⎥⎦y=[]001x(1)画出其模拟结构图;(2)求系统的传递函数。解:(i)系统的模拟结构图如下:2uy1x21x11x3-1sss-3-3-2(ii)传递函数Gs()由下式给出:−1G(s)=C(sI−A)B+D对于该问题,矩阵A,B,C和D为:⎡010⎤⎡0⎤⎢⎥⎢⎥A=−2−30,B=1,C=[001],D=0⎢⎥⎢⎥⎢⎣−11−3⎥⎦⎢⎣2⎥⎦因此:−1⎡s−10⎤⎡0⎤[]⎢⎥⎢⎥G(s)=0012s+301⎢⎥⎢⎥⎢⎣1−1s+3⎥⎦⎢⎣2⎥⎦22s+7s+3=32s+6s+11s+624
课后答案网www.khdaw.com2-15已知两系统的传递函数阵WsWs()和()分别为12⎡⎤11⎡11⎤⎢⎥⎢⎥ss++12ss++34Ws()=⎢⎥,Ws()=⎢⎥12⎢⎥s+1⎢1⎥00⎢⎥⎣⎦s+2⎢⎣s+1⎥⎦试求两子系统串联联结和并联联结时,系统的传递函数阵。解:串联联结时,WsWsWs()=⋅()()21⎡11⎤⎡11⎤⎢⎥⎢⎥=s+3s+4s+1s+2⎢1⎥⎢s+1⎥⎢0⎥⎢0⎥⎣s+1⎦⎣s+2⎦2⎡1s+5s+7⎤⎢232⎥=s+4s+3s+9s+26s+24⎢⎥11⎢⎥⎢22⎥⎣s+2s+1s+3s+2⎦并联联结时,WsWsWs()=+()()12⎡11⎤⎡11⎤⎢⎥⎢⎥=⎢s+1s+2⎥+⎢s+3s+4⎥s+11⎢0⎥⎢0⎥⎣s+2⎦⎣s+1⎦⎡11⎤⎢22⎥=s+4s+3s+6s+8⎢⎥1s+1⎢⎥⎣s+1s+2⎦25
课后答案网www.khdaw.com2-16给定题图2-16所示的动态输出反馈系统,其中,⎡⎤⎡1111⎤⎢⎥⎢⎥ss++12ss++34Gs12()==⎢⎥⎢,Gs()⎥⎢⎥⎢s+11⎥00⎢⎥⎢⎣⎦⎣ss++21⎥⎦试定出反馈系统的传递函数矩阵Gs()。uˆ()s+yˆ(s)G(s)1_G(s)2题图2-16解:计算所依据的关系式为()()[]()()−1()[()()]−1()Gs=GsI+GsGs或Gs=I+GsGsGs121121采用前一个计算公式。对此,先行计算⎡11⎤⎡11⎤⎢⎥⎢⎥s+3s+4s+1s+2G()()sGs=⎢⎥⎢⎥21⎢1⎥⎢s+1⎥00⎢⎥⎢⎥⎣s+1⎦⎣s+2⎦2⎡1s+5s+7⎤⎢⎥()s+1()s+3()s+2()s+3()s+4=⎢⎥⎢11⎥⎢⎥2⎢⎣()s+1()s+1()s+2⎥⎦22⎡s+4s+4s+5s+7⎤⎢⎥()s+1()s+3()s+2()s+3()s+4[]I+G()()sGs=⎢⎥21⎢2⎥1s+3s+3⎢⎥2⎢⎣()s+1()s+1()s+2⎥⎦−122⎡s+4s+4s+5s+7⎤⎢⎥()s+1()s+3()s+2()s+3()s+4[]()()−1⎢⎥I+GsGs=21⎢2⎥1s+3s+3⎢⎥2⎢⎣()s+1()s+1()s+2⎥⎦26
课后答案网www.khdaw.com22⎡()s+3s+3()s+3()s+4(s+5s+7)(s+1)⎤⎢432432⎥s+10s+37s+62s+41s+10s+37s+62s+41=⎢⎥⎢()s+2()s+3()s+4()s2+4s+4()s+2()s+4⎥⎢⎥()()432432⎣s+1s+10s+37s+62s+41s+10s+37s+62s+41⎦基此,求得()()[]()()−1Gs=GsI+GsGs12122⎡11⎤⎡()s+3s+3()s+3()s+4()s+5s+7()s+1⎤⎢⎥⎢432432⎥=⎢s+1s+2⎥×⎢s+10s+37s+62s+41s+10s+37s+62s+41⎥⎢s+1⎥⎢()s+2()s+3()s+4()s2+4s+4()s+2()s+4⎥0⎢⎥⎢⎥432432⎣s+2⎦⎣()s+1()s+10s+37s+62s+41s+10s+37s+62s+41⎦32⎡()s+2()s+3()s+4s+7s+15s+9⎤⎢432432⎥s+10s+37s+62s+41s+10s+37s+62s+41=⎢⎥⎢()s+3()s+4()s2+4s+4()s+1()s+4⎥⎢⎥432432⎣s+10s+37s+62s+41s+10s+37s+62s+41⎦27
课后答案网www.khdaw.com2-17将下列系统输入输出方程变换为状态空间模型。(1)yk(2++)2(1yk++)()(yk=uk)(2)yk(2)++++yk(1)0.16()yk=++uk(1)2()uk解:(1)可知:a=2a=1b=0b=0b=112012故可得:β=b=000β=b−aβ=0−2×0=01110β=b−aβ−aβ=1−1×0−1×0=1221120因此,当选择状态变量如下:x(k)=y(k)−βu(k)=y(k)10x(k)=y(k+)1−βu(k)−βu(k+)1=y(k+)1210可写出如下线性离散系统的状态空间表达式:⎡01⎤⎡0⎤x(k+)1=⎢⎥x(k)+⎢⎥u(k)⎣−1−2⎦⎣1⎦y(k)=[]10x(k)(2)yk(++++2)yk(1)0.16()yk=++uk(1)2()uk解:可知:a=1a=.016b=0b=1b=212012故可得:β=b=000β=b−aβ=1−1×0=11110β=b−aβ−aβ=2−1×1−.016×0=1221120因此,当选择状态变量如下:x(k)=y(k)−βu(k)=y(k)10x(k)=y(k+)1−βu(k)−βu(k+)1=y(k+)1−u(k)210可写出如下线性离散系统的状态空间表达式:⎡01⎤⎡1⎤x(k+)1=⎢⎥x(k)+⎢⎥u(k)⎣−.016−1⎦⎣1⎦28
课后答案网www.khdaw.comy(k)=[]10x(k)29
课后答案网www.khdaw.com2-18求下列系统状态空间模型对应的z域传递函数G(z)⎧−⎡⎤⎡201⎤⎧⎡⎤01⎡0⎤⎪xx(1kk+=)⎢⎥⎢()+⎥u(k)⎪xx(1kk+=)⎢⎥()+⎢⎥u()k(1)⎨⎣⎦⎣03−1⎦(2)⎨⎣⎦−−0.161⎣1⎦⎪⎪⎩yk()14()()=−[]xk+uk⎩yk()21()=[]xk解:(1)由公式可得:−1G(z)=C(zI−G)H+D−1⎡z+20⎤⎡1⎤=1[−]4⎢⎥⎢⎥+1⎣0z+3⎦⎣1⎦⎡1⎤0[]⎢z+2⎥⎡1⎤=1−4⎢1⎥⎢⎥+1⎢0⎥⎣1⎦⎣z+3⎦2z+2z+1=2z+5z+6⎡⎤01⎡0⎤(2)x(1kx+=)⎢⎥()k+⎢⎥u(k)⎣⎦−−0.161⎣1⎦yk()21()=[]xk解:由公式可得:−1G(z)=C(zI−G)H+D−1⎡z−1⎤⎡0⎤=2[]1⎢⎥⎢⎥⎣.016z+1⎦⎣1⎦2⎡z+.084z+.0161⎤⎢22⎥⎡0⎤z(z+z+.016)z+z+.016=[]21⎢⎥⎢⎥⎢−.016z⎥⎣1⎦⎢⎣z2+z+.016z2+z+.016⎥⎦z+2=2z+z+.01630
课后答案网www.khdaw.com习题解答3-13-23-33-43-53-63-73-83-93-10
课后答案网www.khdaw.comAt3-1试用直接计算法计算下列矩阵A的矩阵指数函数e(即状态转移矩阵)。⎡100⎤⎡−10⎤⎢⎥⑴A=⎢⎥⑵A=⎢001⎥⎣01⎦⎢⎣0−10⎥⎦At解(1)按矩阵指数函数e的展开式,可计算如下:22kkAtAtAte=++IAt++...+...2!k!22⎡⎤10⎡⎤−−10⎡⎤10t=++⎢⎥⎢⎥t⎢⎥+...⎣⎦0101⎣⎦⎣⎦012!⎡⎤121.−+tt+..0⎢⎥2!=⎢⎥⎢⎥1201++tt+...⎢⎥⎣⎦2!−t⎡⎤e0=⎢⎥t⎣⎦0eAt(2)按矩阵指数函数e的展开式,可计算如下:22kkAtAtAte=++IAt++...+...2!k!2⎡⎤100100⎡⎤⎡⎤1002⎢⎥⎢⎥⎢⎥t=++010001t001+...⎢⎥⎢⎥⎢⎥2!⎢⎥⎣⎦001010⎢⎥⎣⎦−−⎢⎥⎣⎦010⎡⎤121.++tt+..00⎢⎥2!⎢⎥⎢⎥1123=−01tt+...−t+...⎢⎥2!3!⎢⎥⎢⎥0−+tt1132+...1−t+...⎢⎥⎣⎦3!2!t⎡⎤e00⎢⎥=⎢⎥0cossttin⎢⎥0s−inttcos⎣⎦2
课后答案网www.khdaw.comAt3-2试利用矩阵指数函数的性质计算下列矩阵A的矩阵值函数e。⎡−210⎤⎡000⎤⎢⎥⎢⎥⑴A=0−20⑵A=100⎢⎥⎢⎥⎢⎣00−2⎥⎦⎢⎣001⎥⎦解(1)因为A矩阵为由⎡⎤−21AA12=⎢⎥=−[]2⎣⎦02−At2个方块矩阵组成的块对角矩阵,因此矩阵A的矩阵值函数e为⎡⎤−21⎡⎤⎡⎤1t⎡10t⎤⎡⎤e0A1t⎡⎤⎢⎥t⎢⎥e0−2t⎢⎥⎢⎥eeAt==⎢⎥e0⎣⎦02−=01=−2t⎢⎥A2t⎢⎥⎣⎦⎢010⎥⎣⎦0e⎢⎥0e−2t⎢⎥0e−2t⎢001⎥⎣⎦⎣⎦⎣⎦(2)因为A矩阵为由⎡⎤00AA12=⎢⎥=[]1⎣⎦102个方块矩阵组成的块对角矩阵,其中块矩阵A1的矩阵指数函数为TT⎛⎞⎛⎞⎡⎤00⎡⎤⎡⎤⎡⎤⎡011t10⎤e=expA1t⎜⎟⎜⎟⎢⎥tt=exp⎢⎥⎢⎥⎢⎥⎢==⎥⎝⎠⎝⎠⎣⎦10⎢⎥⎣⎦⎣⎦⎣⎦⎣0001t1⎦At因此矩阵A的矩阵值函数e为⎡100⎤⎡⎤e0A1t⎢⎥Ate1==⎢⎥⎢t0⎥0eA2t⎣⎦⎢t⎥00e⎣⎦3
课后答案网www.khdaw.comAt3-3试选择适当的方法计算下列矩阵A的矩阵指数函数e。⎡100⎤⎢⎥⎡01⎤⑴A=⎢011⎥⑵A=⎢⎥(a≠b)⎣−ab−(a+b)⎦⎢⎣002⎥⎦解(1)因为A矩阵为由⎡11⎤AA12==[]1⎢⎥⎣02⎦2个方块矩阵组成的块对角矩阵,其中块矩阵A2的矩阵指数函数的计算过程为⎡111⎤−−1adj(sI−A2)1⎡⎤s−21⎢sss−12−−1⎥()sI−=A=⎢⎥=⎢⎥2sI−−A(1s)(2s−)⎣⎦01s−⎢1⎥20⎢⎣s−2⎥⎦ttt2⎡⎤eee−e[At2=−=L−−11()sIA]⎢⎥22t⎣⎦0eAt因此矩阵A的矩阵值函数e为t⎡e00⎤⎡⎤e0A1t⎢⎥Att2tte0==⎢⎥A2t⎢ee−e⎥⎣⎦0e⎢2t⎥00e⎣⎦2At(2)因为A矩阵的特征多项式为s+(a+b)s+ab,其特征值为-a和-b。因此矩阵A的矩阵值函数e可表示为Ate=α0t)(I+α1(t)A其中待定函数由如下计算确定⎡⎤α()t⎡⎤1e−−ab−1⎡−−at⎤⎡1eat+e−bt⎤0a⎢⎥==⎢⎥⎢⎥⎢⎥α()t1−bee−−btab−−+ate−bt⎣⎦1⎣⎦⎢⎣⎥⎢⎦⎣⎥⎦则系统的矩阵指数函数为Ate=+αα()tI()tA011−−atbt−−atbt=−{}(ebaI++e)(ee)−+Aab−−−atbt−−atbt1⎡−+baeeee−+⎤=⎢⎥−−atbt−−atbtab−⎣−−+ab(ee)ea−be⎦4
课后答案网www.khdaw.com3-4试说明下列矩阵是否满足状态转移矩阵的条件,若满足,试求与之对应的A矩阵。⎡100⎤1⎡(2e−t+e3t)e3t−e−t⎤⎢⎥⑴Φt)(=0cost−sint⑵Φ(t)=⎢⎥⎢⎥4(4e3t−e−t)(2e−t+e3t)⎢⎣0sintcost⎥⎦⎣⎦解(1)判断是否为状态转移矩阵,主要看是否其满足状态转移矩阵的如下定义式。⎧Φ&(t)=AΦ(t)⎨⎩Φ)0(=I本例的Φ(t)显然满足定义的初始条件。设该Φ(t)满足该微分方程式,则也应该满足t=0的情形Φ=Φ&(0)A(0)即A=Φ&(0)将本例的Φ(t)代入有⎡⎤000⎡000⎤At=Φ&(0)=⎢⎥0−sin−cost=⎢00−1⎥⎢⎥⎢⎥⎢⎥⎣⎦0cossttint=0⎢⎣010⎥⎦对上述计算出的A,还需检验其是否满足Φ(t)定义中的微分方程式。该微分方程式的左右两边分别为⎡⎤000Φ=−&()tt⎢⎥0sin−cost⎢⎥⎢⎥⎣⎦0costt−sin⎡⎤00010⎡0⎤⎡000⎤⎢⎥⎢⎥⎢⎥AΦ=()0010costt−−sint=−0sint−cost⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦0100sincos⎢⎣tt⎥⎦⎢⎣0cost−sint⎥⎦综上所述,因为该A矩阵满足Φ(t)定义中的微分方程式和初始条件,因此其为该Φ(t)为一个状态转移矩阵,A为其对应的系统矩阵。(2)判断是否为状态转移矩阵,主要看是否其满足状态转移矩阵的如下定义式。⎧Φ&(t)=AΦ(t)⎨⎩Φ)0(=I本例的Φ(t)显然满足定义的初始条件。设该Φ(t)满足该微分方程式,则也应该满足t=0的情形5
课后答案网www.khdaw.comΦ=Φ&(0)A(0)即A=Φ&(0)将本例的Φ(t)代入有−−tt33tt1⎡⎤2(−+ee3)3ee+⎡11⎤A=Φ&(0)=⎢⎥=⎢⎥33tt−−tt4⎣⎦4(3ee+−)2(ee+3)⎣41⎦t=0对上述计算出的A,还需检验其是否满足Φ(t)定义中的微分方程式。该微分方程式的左右两边分别为−−tt33tt1⎡⎤2(−+ee3)3ee+Φ=&()t⎢⎥33tt−−tt4⎣⎦4(3ee+−)2(ee+3)−−tt33tt−tt33tt−⎡⎤1111⎡⎤2(eeee+−)⎡2(−ee+3)3ee+⎤AtΦ=()⎢⎥×⎢⎥=⎢⎥33tt−−tt3tt−−tt3⎣⎦4144⎣⎦4(ee−+)2(ee)⎣4(3ee+)2(−ee+3)⎦综上所述,因为该A矩阵满足Φ(t)定义中的微分方程式和初始条件,因此其为该Φ(t)为一个状态转移矩阵,A为其对应的系统矩阵。6
课后答案网www.khdaw.com3-5试求下列齐次状态方程的解。⎡x&1⎤⎡−100⎤⎡x1⎤⎡x&1⎤⎡210⎤⎡x1⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥(1)⎢x&2⎥=⎢0−20⎥⎢x2⎥(2)⎢x&2⎥=⎢021⎥⎢x2⎥⎢⎣x&3⎥⎦⎢⎣00−3⎥⎦⎢⎣x3⎥⎦⎢⎣x&3⎥⎦⎢⎣002⎥⎦⎢⎣x3⎥⎦解:(1)由于A矩阵为对角线矩阵,其对应的矩阵指数函数为−t⎡e00⎤At⎢−2t⎥e0=⎢e0⎥⎢00e−3t⎥⎣⎦因此齐次状态方程的解为⎡⎤e00−−()tt0Att()−−00⎢⎥2()tt−xx()=ett()=0e0x()t00⎢⎥⎢⎥00e−−3(tt0)⎣⎦(2)由于A矩阵为约旦矩阵,其对应的矩阵指数函数为2⎡1/tt2!⎤At2t⎢⎥ee01=⎢t⎥⎢001⎥⎣⎦因此齐次状态方程的解为2⎡⎤1(tt−−)(tt)/2!00Att()−−002()tt⎢⎥xx()=ett()e=−01(tt)x()t00⎢⎥0⎢⎥001⎣⎦7
课后答案网www.khdaw.com3-6设线性定常系统的齐次状态方程为xx&()tAt=()已知−2t⎡⎤e⎡1⎤⑴x()t=⎢⎥,当x(0)=⎢⎥−2t⎣⎦−e⎣−1⎦−t⎡⎤2e⎡⎤2⑵x()t=⎢⎥,当x(0)=⎢⎥−t⎣⎦−e⎣⎦−1试求取该系统的系统矩阵A及状态转移矩阵Φt)(。解:根据齐次状态方程的解表达式,将同一个系统在不同初始条件下的解排列在一起,有AtAtAt[()xxtt()]=[ex(0)ex(0)]=e[(0)xx(0)]121212因此,有At-1Φ=()=ett[()xxxx()][(0)t(0)]1212⎡⎤−−2tt2⎡⎤12-1ee=⎢⎥⎢⎥−−2tt⎣⎦−−ee⎣⎦−−11−−tttt22−−⎡⎤22eeee−−2=⎢⎥−−tttt22−−⎣⎦−+eeee−+2下面计算上述矩阵指数函数(状态转移矩阵)对应的A。由状态转移矩阵的定义式⎧Φ&(t)=AΦ(t)⎨⎩Φ)0(=I知,矩阵A和Φ(t)满足该微分方程式,则也应该满足t=0的情形Φ=Φ&(0)A(0)即A=Φ&(0)将上述Φ(t)代入有−−tttt22−−⎡⎤−+2224eeee−+⎡02⎤A=Φ&(0)=⎢⎥=⎢⎥−−tttt22−−⎣⎦eeee−−24⎣−13−⎦t=0对上述计算出的A,还需检验其是否满足Φ(t)定义中的微分方程式。该微分方程式的左右两边分别为8
课后答案网www.khdaw.com−−tttt22−−⎡⎤−+2224eeee−+Φ=&()t⎢⎥−−tttt22−−⎣⎦eeee−−24−−−−tttt22−−tt2−−tt2⎡⎤02⎡⎤22eeee−−−22⎡eeee+2−2+4⎤AtΦ=()⎢⎥×⎢⎥=⎢⎥−−−−tttt22−−tttt2−−2⎣⎦−−13⎣⎦−+eeee−+224⎣eeee−−⎦综上所述,因为该A矩阵满足Φ(t)定义中的微分方程式和初始条件,因此所求得的A及其状态转移矩阵Φ(t)满足题目所给定的两个初始条件。9
课后答案网www.khdaw.com3-7已知线性定常系统的齐次状态方程为⎡⎤01xx&()tt=⎢⎥()⎣⎦21−T试确定与状态x(1)=[25]相对应的初始状态x(0)。2解对本题,先求出系统的状态转移矩阵。由于矩阵A为友矩阵,其特征多项式为s+s-2,特征值为1和-2,其对应的特征向量分别为TT[11][1-2]则由特征向量组成的变换矩阵P可以将A矩阵变换为对角线矩阵,即有⎡⎤11P=⎢⎥⎣⎦12−%−1⎡10⎤APA==P⎢⎥⎣02−⎦因此,原矩阵A的矩阵指数函数为tAtAt%−1⎡11⎤⎡⎡⎤e0121⎤ee==PP⎢⎥⎢⎢⎥−2t×⎥⎣12−⎦⎣⎣⎦0e311−⎦ttt−−22t1⎡⎤2e+ee-e=⎢⎥tt−−22tt3⎣⎦2e−+2ee2eTA×1因此,若已知x(1)=[25],则由xx(1)=e(0)可得−−1212−12−A1⎡⎤2e+ee-e⎡⎤23⎡ee−⎤xx(0)=e(1)==⎢⎥⎢⎥⎢⎥−−1212−123⎣⎦2e−+2ee2e⎣⎦5⎢⎣3e+2e⎥⎦10
课后答案网www.khdaw.com3-8已知线性定常系统的非齐次状态方程为⎡x&1⎤⎡01⎤⎡x1⎤⎡2⎤⎡x1)0(⎤⎡0⎤⎢⎥=⎢⎥⎢⎥+⎢⎥u⎢⎥=⎢⎥⎣x&2⎦⎣−2−3⎦⎣x2⎦⎣0⎦⎣x2)0(⎦⎣1⎦试分别求在下列输入下状态轨迹x()t(1)阶跃信号ut)(=(1t≥)0;−t(2)负指数信号ut)(=e(t≥)0。解先求系统的状态转移矩阵。⎡2111−−⎤++−1adj(sI−A)1⎡⎤s+31⎢ssss+1212+++⎥()sI−=A=⎢⎥=⎢⎥sI−+A(1s)(2s+)⎣⎦−−−22s⎢212⎥++⎢⎣ssss+1212+++⎥⎦−−tt22−−ttAt−−11⎡⎤2e−−eeee[=−L()sIA]=⎢⎥−−−−tttt22⎣⎦-2e2++e-e2e然后根据非齐次状态方程的解公式对不同输入求解状态响应。−t(1)当输入信号为负指数信号u(t)=e(t≥)0t−−−−1111AtAt(−τ)xx(ts)()=−+−LL⎡⎤IA⎡()(sIABUs)⎤=+ex(0)e(Buτ)dτ⎣⎦0⎣⎦∫0−t⎡⎤-3e+3=⎢⎥−t⎢⎥⎣⎦3e−2−t(2)当输入信号为负指数信号u(t)=e(t≥)0t−−−−1111AtAt(−τ)xx(ts)()=−+−LL⎡⎤IA⎡()(sIABUs)⎤=+ex(0)e(Buτ)dτ⎣⎦0⎣⎦∫0−−−2ttt⎡⎤ee4−+te=⎢⎥−−−2ttt⎢⎥⎣⎦−−2e+3e4et11
课后答案网www.khdaw.com3-9试求取下列连续系统状态方程在T=0.1s的离散化方程。⎡⎤⎡000⎤⎡01⎤⎡1⎤(1)xx&()t=+⎢⎥⎢⎥u(2)xx&()tu=+⎢⎥⎢⎥⎣⎦⎣011⎦⎣02−⎦⎣1⎦解采样周期T=0.1s较大,采用精确离散法(1)先求系统的状态转移矩阵。由于A为对角线矩阵,因此状态转移矩阵为⎡10⎤Φ=()t⎢⎥t⎣0e⎦因此,精确离散化方法离散化所得的系统模型各矩阵为⎡⎤10⎡⎤10GT()=()Φ=T⎢⎥=⎢⎥T0.1⎣⎦0e⎣⎦0eTT⎡10⎤⎡⎤⎡00⎤⎡0⎤HT()=Φ()dttB=⎢⎥⎢⎥⎢dt=⎥⎢=⎥∫∫00⎣0etT⎦⎣⎦⎣1e1e1−⎦⎣0.1−⎦(2)先求系统的状态转移矩阵。由求状态转移矩阵的方法,可求得本题的−2t⎡1(1e)/2−⎤Φ=()t⎢⎥−2t⎣0e⎦因此,精确离散化方法离散化所得的系统模型各矩阵为−−20T.2⎡⎤1(1e)/2−−⎡⎤1(1e)/2GT()=()Φ=T⎢⎥=⎢⎥−−20T.2⎣⎦0e⎣⎦0e−−22tT−0.2TT⎡1(1e)/2−⎤⎡⎤⎡⎤1116T-1+e⎡-0.4+e⎤HT()=Φ∫∫00()dttB=Φ()t⎢−−22tT⎥⎢⎥dt⎢⎥==⎢−0.2⎥⎣0e⎦⎣⎦⎣⎦1442-2e⎣2-2e⎦12
课后答案网www.khdaw.com3-10已知系统的状态方程为⎡⎤⎡0.2110⎤⎡−1⎤xx(1kk+=)⎢⎥⎢()+⎥u(k)x(0)=⎢⎥⎣⎦⎣00.201⎦⎣3⎦其中输入信号u1(k)和u2(k)分别为阶跃信号和斜坡信号在采样周期为0.2s时的采样值。试求系统的状态方程的解x(k)。k解(1)直接法求解。先计算出G。由于G矩阵为约旦矩阵,则kk11−−kk1k⎡⎤λλΩk⎡0.20.2k⎤G==⎢⎥⎢⎥kk⎣⎦00λ⎣0.2⎦又知⎡1⎤u()k=⎢⎥⎣0.2k⎦因此有k−1kk−−j1xx()kG=+(0)∑GHju()j=0kk−−11k−1kj−k−j−2⎡⎤0.20.2kk⎡⎤−11⎡0.20.2(−−j1)⎤⎡⎤0⎡⎤1=+⎢⎥⎢⎥∑⎢⎥⎢⎥⎢⎥kk−−j1⎣⎦00.2⎣⎦30j=0⎣00.2⎦⎣⎦⎣⎦10.2j⎡⎤−+0.2k30.2×k−−11kkk−1⎡0.2kj−+0.2kj−−1(−−j1)⎤=+⎢⎥∑⎢⎥kk−j⎣⎦⎢⎥30.2×j=0⎢⎣0.2j⎥⎦-1(2)用z变换法求解。先计算(zI-G):−1adj(-)zIG1⎡z−0.21⎤(-)zIG==⎢⎥2|-|(0zIGz−.2)⎣00z−.2⎦⎡⎤11⎢⎥2zz−−0.2(0.2)=⎢⎥⎢⎥1⎢⎥0⎣⎦z−0.2对系统输入,⎡1⎤u()k=⎢⎥⎣0.2k⎦其拉氏变换为13
课后答案网www.khdaw.com⎡z⎤⎢⎥z−1Uz()=⎢⎥⎢0.2z⎥⎢(1z−)2⎥⎣⎦因此有-1Xz()(I-)[(0)=+zGzxHUz()]⎡⎤11⎧⎫⎡⎤z⎢⎥zz−−0.2(0.2)2⎪⎪⎪⎪⎡⎤⎡⎤−110⎢⎥z−1=⎢⎥⎨⎬⎢⎥⎢⎥z+⎢⎥⎢⎥1⎪⎪⎣⎦⎣⎦301⎢⎥0.2z⎢⎥0z0.2⎪⎪⎢⎥(1z−)2⎣⎦−⎩⎭⎣⎦⎡⎤11⎡⎤z−+z⎢⎥2⎢⎥zz−−0.2(0.2)z−1=⎢⎥⎢⎥⎢⎥1⎢⎥0.2z03z+⎢⎥z0.2⎢⎥(1z−)2⎣⎦−⎣⎦⎡⎤−zz30zz.2+++⎢⎥222z−0.2(zzz−−−0.2)(1)(0.2)(zz−−0.2)(1)=⎢⎥⎢⎥30zz.2⎢⎥+2⎣⎦zzz−−−0.2(0.2)(1)⎡⎤−zz30z.2z+++⎢⎥222zzzzzz−−−−−−0.2(0.2)(1)(0.2)(0.2)(1)==−−11⎢⎥x()kXZZ{()}z⎢⎥30zz.2⎢⎥+2⎣⎦zzz−−−0.2(0.2)(1)⎡⎤−zzz30z.2z+−++⎢⎥222zzzz−−−−×0.20.8(1)0.8(0.2)(0.2)0.8(z−0.2)⎢⎥⎢⎥0.4zz0.2−0.4z=Z−1⎢⎥+++32230.8×−(zz0.2)0.8×−(1)0.8×−(z1)⎢⎥⎢⎥30zzzz.20.20−.2⎢⎥+++222⎢⎥zzzz−−−−0.20.8(0.2)0.8(1)0.8(1)⎣⎦⎡⎤−0.752zzzz2.120.240.2+++⎢⎥3223220.8×−(zzzz0.2)0.8×−(0.2)0.8×−(1)0.8×−(1)=Z−1⎢⎥⎢⎥2.12zzz0.2−0.2++⎢⎥2220.8(zz−−0.2)0.8(1)0.8(z−1)⎣⎦kk⎡⎤−×0.7520.22.12kk×0.20.240.2⎢⎥+++32320.80.80.80.8=⎢⎥k⎢⎥2.120.2×−0.2k0.2⎢⎥++22⎣⎦0.80.80.814
课后答案网www.khdaw.com3-11设线性时变离散系统的状态方程为−−kTkT⎡⎤11−ee⎡⎤1⎡0⎤xx(1kk+=)⎢⎥()+⎢⎥u(k)x(0)=⎢⎥−−kTkT⎣⎦00ee⎣⎦1−⎣0⎦T试求取在T=2.0s且u()01(kk=[]≥0)时该系统状态方程的解。15
课后答案网www.khdaw.com习题解答4-14-24-34-44-54-64-74-84-94-104-114-12
课后答案网www.khdaw.com4-1判定如下系统的状态能控性和输出能控性。⎧−⎡310⎤⎡⎤11−⎪⎢⎥⎢⎥⎧⎡⎤10⎡⎤1xx&=−030+00u⎪xx&=+⎢⎥⎢⎥u⎪⎪⎢⎥⎢⎥(1)⎨⎣⎦−12⎣⎦0(2)⎨⎢⎣001−⎥⎢⎥⎦⎣⎦20⎪⎪⎩yx=[]01⎪=⎡⎤101yx⎢⎥⎪⎩⎣⎦−110⎧⎡⎤λ00⎡⎤a⎪⎢⎥⎢⎥⎪xx&=+01λbu⎢⎥⎢⎥(3)⎨⎪⎢⎥⎣⎦00λ⎣⎢⎥c⎦⎪⎩yx=[]100解(1)采用代数判据。由状态能控性的代数判据有⎡⎤11rankQB=rank[AB]==rank⎢⎥2=nc⎣⎦01−所以状态完全能控。由输出能控性的代数判据有rank[CBCABD]=rank0[−=10]1=m所以输出完全能控。(2)由状态能控性的模态判据有,由于特征值-3的约旦块对应的B的分块的最后一行为全零,则系统不完全能控。由输出能控性的代数判据有⎡⎤31−L2rank[CBCABCABD]=rank⎢⎥==2m⎣⎦−11L所以输出完全能控。(3)由状态能控性的模态判据有,由于特征值λ的2个约旦块对应的B的分块的最后一行为[a]和[c]相关,则系统不完全能控。由输出能控性的代数判据有22[]CBCABCABD=⎡aaλλa0⎤⎣⎦因此,当a不为0时,输出完全能控。否则,输出不能控。2
课后答案网www.khdaw.com4-2判定如下系统的状态能观性。⎧⎡010⎤⎧−⎡⎤21⎪⎢⎥⎪x&=⎢⎥x⎪xx&=⎢001⎥(1)⎨⎣−24⎦(2)⎨⎪⎪⎢⎣−−−243⎥⎦⎩y=[]11x⎪=⎩y[]142x⎧−⎡⎤210⎪⎢⎥xx&=−020⎪⎢⎥⎪(3)⎨⎢⎥⎣⎦003−⎪⎡⎤102⎪yx=⎢⎥⎪⎩⎣⎦204解(1)采用代数判据。由状态能观性的代数判据有⎡⎤C⎡⎤11rankQn=rank⎢⎥==rank⎢⎥2=o⎣⎦CA⎣⎦03所以状态完全观控。(2)采用代数判据。由状态能观性的代数判据有⎡⎤C⎡⎤142⎢⎥⎢⎥rankQC==rankArank−4−7−2=3=no⎢⎥⎢⎥⎢⎥CA2⎢⎥441−⎣⎦⎣⎦所以状态完全观控。(3)由状态能观性的模态判据有,由于每个特征值仅有一个约旦块且所对应的C的分块的第一列非全为零,因此系统完全能观。3
课后答案网www.khdaw.com4-3确定使下列系统为状态完全能控和状态完全能观的待定常数α、β。ii⎧⎡002⎤⎡⎤1⎧⎡⎤α11⎡⎤1⎪⎢⎥⎢⎥⎪xx&=+⎢⎥⎢⎥u⎪xx&=−⎢103⎥⎢⎥+β1u(1)⎨⎣⎦0α2⎣⎦1()2⎨⎢⎣014−⎥⎢⎥⎦⎣⎦β⎪⎪2⎩y=−[]11x⎪=⎩y[]00β3x解(1)采用代数判据。由状态能控性、状态能观性的代数判据有⎡11++αα11⎤⎡11⎤rank[]BAB==rank⎢⎥⎢rank⎥⎣10αα⎦⎣−α−1221⎦⎡⎤C⎡11−⎤⎡10⎤rank⎢⎥==rank⎢⎥⎢rank⎥⎣⎦CA⎣αα11−+⎦⎣αα−α⎦12112因此系统状态完全能控、状态完全能观的条件都为10+αα−≠12(2)采用代数判据。由状态能控性、状态能观性的代数判据有⎡12ββ28−β⎤2122⎢⎥rank⎡⎤BABAB=−rankβββ13−3+14β⎣⎦⎢1212⎥⎢βββ−−4141ββ+3⎥⎣21212⎦⎡⎤C⎡⎤00β3⎢⎥⎢⎥rankCA=rank0β*⎢⎥⎢⎥32⎢⎥CA⎢⎥β**⎣⎦⎣3⎦因此当β不为0时系统状态完全能观,否则不能观。当β=β=0时,系统状态完全能控;312222233更进一步若1-+10βββ-27ββββ+25+3-14ββ+6βββ+2+4不为0时,系统状态完全121221211212能控,否则不能控。4
课后答案网www.khdaw.com4-4设连续被控系统的状态方程为⎡⎤01⎡0⎤xx&=+⎢⎥⎢⎥u⎣⎦−40⎣1⎦为了保持该连续系统的离散化系统的状态能控性,试确定采样周期T的选择。解由连续系统的A矩阵,可求得系统的特征值伟2j和-2j。根据离散化系统状态能控能观的条件,为保持连续系统的状态能控能观性,采样周期的选择满足2kkππTk≠==1,2,...Im[λλ−]2ij5
课后答案网www.khdaw.com4-5试将下列系统按能控性进行结构分解。⎧−⎡⎤121⎡0⎤⎧−⎡⎤221−⎡⎤0⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪Ab==010,1⎪Ab=−020,0=⎢⎥⎢⎥⎢⎥⎢⎥(1)⎨(2)⎨⎪⎢⎥⎣⎦043−⎢⎣2⎥⎦⎪⎢⎥⎣⎦140−⎣⎢⎥1⎦⎪⎩C=−[]111⎪⎩C=−[]111解:(1)按4.5.1小节的计算方法,本题得到的能控性分解为⎡106−⎤⎡1⎤⎡⎤xx&%%⎡⎤11⎢⎥⎢⎥⎢⎥=+012⎢⎥0u⎢⎥⎣⎦x&%⎢⎥⎢⎣⎦x%⎥22⎢⎣003⎥⎢⎦⎣0⎥⎦⎡⎤x&%1y=−[133]⎢⎥⎢⎥⎣⎦x&%2其中能控子系统为1维子系统x%,完全不能控子系统为2维子系统x%,变换矩阵为12⎡030⎤⎢⎥P=103c⎢⎥⎢⎣200⎥⎦(2)按4.5.1小节的计算方法,本题得到的能控性分解为⎡014−⎤⎡1⎤⎡⎤xx%%&11⎢⎥⎢⎡⎤⎥⎢⎥=−⎢122⎥⎢⎢⎥+0⎥u⎢⎥⎣⎦x%&2⎢−⎥⎢⎣⎦x%2⎥0020⎣⎦⎣⎦⎡⎤x%&1y=−[111]⎢⎥⎢⎥⎣⎦x%&2其中能控子系统为2维子系统x%,完全不能控子系统为1维子系统x%,变换矩阵为12⎡010⎤⎢⎥P=001c⎢⎥⎢⎣100⎥⎦6
课后答案网www.khdaw.com4-6试将下列系统按能观性进行结构分解。⎧−⎡⎤121⎡0⎤⎧−⎡⎤221−⎡⎤0⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪Ab==010,0⎪Ab=−020,0=⎢⎥⎢⎥⎢⎥⎢⎥(1)⎨(2)⎨⎪⎢⎥⎣⎦143−⎢⎣1⎥⎦⎪⎢⎥⎣⎦140−⎢⎥⎣1⎦⎪⎩C=−[]111⎪⎩C=−[]111解:(1)按4.5.2小节的计算方法,本题得到的能观性分解为⎡010⎤⎡1⎤⎡⎤xx%%&11⎢⎥⎢⎡⎤⎥⎢⎥=−⎢230⎥⎢⎢⎥+2⎥u⎢⎥⎣⎦x%&2⎢−⎥⎢⎣⎦x%2⎥5520⎣⎦⎣⎦⎡⎤x&%1y=[100]⎢⎥⎢⎥⎣⎦x&%2其中能观子系统为2维子系统x%,完全不能观子系统为1维子系统x%,变换矩阵为12⎡111−⎤⎢⎥−1P=−⎢232⎥o⎢500⎥⎣⎦(2)按4.5.2小节的计算方法,本题得到的能观性分解为⎡010⎤⎡1⎤⎡⎤xx%%&11⎢⎥⎢⎡⎤⎥⎢⎥=−−⎢230⎥⎢⎢⎥+−1⎥u⎢⎥⎣⎦x%&2⎢−−−⎥⎢⎣⎦x%2⎥6310⎣⎦⎣⎦⎡⎤x&%1y=[100]⎢⎥⎢⎥⎣⎦x&%2其中能观子系统为2维子系统x%,完全不能观子系统为1维子系统x%,变换矩阵为12⎡111−⎤⎢⎥−1P=⎢−−101⎥o⎢300⎥⎣⎦7
课后答案网www.khdaw.com4-7试指出下述系统的能控能观分解后的各子系统(特征值λ、λ和λ互异)。123⎧⎡⎤λ11000⎡0⎤⎪⎢⎥⎢⎥⎪⎢⎥00λ100⎢1⎥⎪⎪xx&=+⎢⎥00λ200⎢1⎥u⎨⎢⎥⎢⎥⎪⎢⎥000λ31⎢1⎥⎪⎢⎥0000λ⎢0⎥⎣⎦3⎣⎦⎪⎪⎩yx=[]01110解对该题分析如下:由模态判据可知:x1-x2子系统状态完全能控、状态不完全能观x3子系统状态完全能控、状态完全能观x4-x5子系统状态不完全能控、状态完全能观对状态不完全能观的x1-x2子系统可进一步分析可知,其能观性矩阵的秩为1,则该2维子系统(子空间)应有1维能观,1维不能观。由系统方程知,状态变量x1不能观,x2能观。同样对状态不完全能控的x4-x5子系统可进一步分析可知,其能控性矩阵的秩为1,则该2维子系统(子空间)应有1维能控,1维不能控。由系统方程知,状态变量x5不能控,x4能控。综上所述,x2-x3-x4子系统状态完全能控能观,x1子系统状态完全能控但不能观,x5子系统状态完全不能控但能观。8
课后答案网www.khdaw.com4-8试将下列系统按能控性和能观性进行结构分解。⎡⎤100⎡⎤1⎢⎥⎢⎥(1)A=223,b=2,C=[112]⎢⎥⎢⎥⎢⎥⎣⎦−201⎢⎥⎣⎦2⎡⎤100⎡⎤1⎢⎥⎢⎥(2)A=223,b=−2,C=[100]⎢⎥⎢⎥⎢⎥⎣⎦−201⎢⎥⎣⎦2解(1)本题系统能控又能观,不能进行分解(2)按4.5.3小节的方法,本题系统得到的能控能观性分解为⎡⎤x&%1⎡105−⎤⎡⎡⎤x%11⎤⎢⎥&%%⎢⎥⎢⎢⎥⎥⎢⎥xx=−2110−+2u22⎢⎥⎢⎢⎥⎥⎢⎥x&%⎢⎣002⎥⎢⎦⎣⎢⎥x%0⎥⎦⎣⎦3⎣⎦3⎡⎤x%1⎢⎥y=[105]x%⎢⎥2⎢⎥x%⎣⎦3其中能控但不能观子系统为1维子系统x%,能控又能观子系统为1维子系统x%,不能控又12能观子系统为1维子系统x%,变换矩阵为3⎡105⎤⎢⎥P=−430co⎢⎥⎢⎣010⎥⎦9
课后答案网www.khdaw.com4-9已知能控系统的状态方程A,b阵为⎡12−⎤⎡1⎤A=⎢⎥,b=⎢⎥⎣34⎦⎣1⎦试将该状态方程变换为能控规范形。解系统的能控性矩阵⎡11−⎤QBA==[]B⎢⎥c⎣17⎦是非奇异矩阵,即该系统为状态完全能控,因此可以将其变换成能控规范形。(1)求能控规范I形。根据定理4-24,系统变换矩阵可取为⎡11−⎤⎡−1171⎤TQcc11==⎢⎥⎢,Tc=⎥⎣17⎦⎣8−11⎦~因此,经变换x=Tc1x后所得的能控规范形的状态方程为−−11⎡01−01⎤⎡⎤xx%%&=+TATccc111TBu=⎢⎥⎢x%+⎥u⎣15⎦⎣0⎦(2)求能控规范II形。先求变换矩阵。根据定理4-25,有−1⎡⎤11−⎡−11⎤−1TB===[01][AB][01]⎢⎥1⎢⎥⎣⎦17⎣88⎦则变换矩阵为−1⎡⎤T11⎡−−11⎤⎡61⎤TTcc22==⎢⎥⎢⎥⎢,=⎥⎣⎦TA18⎣26⎦⎣21⎦~因此,经变换x=Tc2x后所得的能控规范形的状态方程为−−11⎡010⎤⎡⎤xx&%%=+TATcc22TBc2u=⎢⎥⎢x%+⎥u⎣−105⎦⎣1⎦10
课后答案网www.khdaw.com4-10已知能观系统的A,b,C阵为⎡11−⎤⎡2⎤A=⎢⎥,b=⎢⎥,C=−[11]⎣11⎦⎣1⎦试将该状态空间模型变换为能观规范形。解因为系统的能观性矩阵⎡C⎤⎡-11⎤Qo==⎢⎥⎢⎥⎣CA⎦⎣02⎦是非奇异矩阵,即该系统为状态完全能观,则可以将其变换成能观规范形。(1)求能观规范I形。根据定理4-26,系统变换矩阵可取为−11⎡-21⎤⎡−11⎤TQoo11==⎢⎥⎢,To=⎥2⎣01⎦⎣02⎦~因此,经变换x=To1x后所得的能控规范形的状态方程为xx%%&=+TAT−−11TBux=+⎡⎢01⎤⎡⎤⎥⎢⎥%−1uooo111⎣−22⎦⎣⎦2yxx==CTo1%%[10](2)求能观规范II形。根据定理4-27,先求变换矩阵,有−−11⎡C⎤⎡⎤⎡0-1101⎤⎡⎤⎡⎤1R1==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎣CA⎦⎣⎦⎣10211⎦⎣⎦⎣⎦2则变换矩阵1⎡10⎤⎡−120⎤TRAoo21==[]R1⎢⎥⎢T2=⎥2⎣12⎦⎣−11⎦~因此,经变换x=To2x后所得的能观规范形的状态空间模型为⎡⎤02−⎡4⎤xx%%&=+TAT−−11TBux=+⎢⎥%⎢⎥uoo22o2⎣⎦12⎣-1⎦���yxx==CTo2%%[]0111
课后答案网www.khdaw.com4-11线性系统的传递函数为ys()sa+=ux()sss32102718+++(1)a取何值时,使系统3阶的状态空间实现或为不能控,或为不能观;(2)在上述a的取值下,求使系统为能控但不能观的3阶状态空间模型。解(1)根据零极点相消定理,对3阶的传递函数实现的3阶状态空间实现或为不能控,或为不能观的充分必要条件为传递函数有零极点相消。对该传递函数其零点为-a,其极点分别为-1,-3,和-6。因此,若出现零极点相消,则a为1,或3,或6。(2)在a为1,或3,或6时,3阶的传递函数实现的3阶状态空间实现或为不能控,或为不能观。因此,若求取的是3阶的能控规范形实现,则必为不能观的。故,下述求取的如下能控规范II形是能控但不能观的。⎧⎡⎤0100⎡⎤⎪⎢⎥⎢⎥⎪xx&=+0010u⎢⎥⎢⎥⎨⎪⎢⎥⎣⎦−−−182710⎢⎣1⎥⎦⎪⎩ya=[]10x12
课后答案网www.khdaw.com4-12求下列传递函数阵的最小实现⎡⎤11⎡11⎤⎢⎥ss+1+1⎢ss2⎥(1)Ws()=⎢⎥(2)Ws()=⎢⎥⎢⎥11⎢11⎥⎣⎦⎢⎥ss+11+⎢⎣s23s⎥⎦解(1)按照4.7.2节的方法,可求得本题传递函数阵的最小实现为⎧xx&=+[11]u⎪⎨⎡⎤1⎪yx=⎢⎥⎩⎣⎦1(2)按照4.7.2节的方法,可求得本题传递函数阵的最小实现为⎧⎡001⎤⎡⎤10⎪⎢⎥⎢⎥xx&=+10000u⎪⎢⎥⎢⎥⎪⎨⎢⎣000⎥⎢⎥⎦⎣⎦01⎪⎡⎤100⎪y=⎢⎥x⎪⎩⎣⎦01013
课后答案网www.khdaw.com习题解答5-15-25-35-45-55-65-75-85-95-105-115-125-135-145-155-165-175-18
课后答案网www.khdaw.com5-1判定下列二次型函数的定号性。22222(1)V(x)=2x1+3x2+x3−2x1x2+2x1x3(2)V(x)=x1+2x3−2x1x3+6x2x3⎡111⎤⎧x2+xx≥0ττ⎢⎥⎪122(3)V(x)=xQx=x⎢120⎥x(4)V(x)=⎨24⎢102⎥⎪⎩x1+x2x2<0⎣⎦解:(1)本题二次型函数对应的对称权矩阵P为⎡2-11⎤⎢⎥P=-130⎢⎥⎢⎣101⎥⎦对实对称矩阵P作合同变换如下⎡⎤⎡⎤⎡2-111-10100⎤行行:(1)(3)−→(1):(2)(1)+→(2)⎢⎥⎢⎥⎢⎥P=⇒-130-130⇒020⎢⎥⎢⎥⎢列列:(1)(3)−→(1):(2)(1)+→(2)⎥⎢⎥⎢⎥⎢⎣⎦⎣⎦⎣101001001⎥⎦因此该二次型函数及对应的对称权矩阵P为正定的。(2)本题二次型函数对应的对称权矩阵P为⎡101−⎤⎢⎥P=003⎢⎥⎢⎣−132⎥⎦对实对称矩阵P作合同变换如下⎡101−⎤⎡⎤100⎡100⎤行行:(1)(3)+→(3):(2)3(3)−→(2)⎢⎥⎢⎥⎢⎥P=⇒003003⇒090−⎢⎥⎢⎥列列:(1)(3)+→(3):(2)3(3)−→(2)⎢⎥⎢⎣−132⎥⎢⎥⎦⎣⎦031⎢⎣001⎥⎦因此该二次型函数及对应的对称权矩阵P为不定的。(3)对实对称矩阵P作合同变换如下⎡111⎤⎡⎤⎡1/2101/200⎤行行:(1)(3)/2−→(1):(2)2(1)−→(2)⎢⎥⎢⎥⎢⎥P=⇒120120⇒000⎢⎥⎢⎥⎢列列:(1)(3)/2−→(1):(2)2(1)−→(2)⎥⎢⎣102⎥⎢⎥⎢⎦⎣⎦⎣002001⎥⎦因此该二次型函数及对应的对称权矩阵P为半正定的。2
课后答案网www.khdaw.com(4)由于2⎧xx+=00xx==1212⎪2⎪xx+>≠00xx,≥01212V():x=⎨2⎪xx+>=00xx,>01212⎪24⎩xx+>00x<122故该函数V(x)为正定函数。3
课后答案网www.khdaw.com5-2确定下列二次型函数中的待定系数的取值范围,从而使其成为正定的。222(1)V(x)=x1+2x2+ax3+2x1x2−2x1x3+2x2x3222(2)V(x)=ax1+bx2+cx3+2x1x2+2x1x3−4x2x3解:(1)本题二次型函数对应的对称权矩阵P为⎡111−⎤⎢⎥P=121⎢⎥⎢⎣−11a⎥⎦对实对称矩阵P作合同变换如下⎡⎤⎡⎤⎡⎤⎡111−110100100⎤行行行:(1)(3)+→(3):(2)(1)−→(2):(3)2(2)−→(3)⎢⎥⎢⎥⎢⎥⎢⎥P=⇒121122⇒012⇒010⎢⎥⎢⎥⎢⎥⎢列列列:(1)(+→3)(3):(2)(−→1)(2):(3)2−→(2)(3)⎥⎢⎥⎢⎥⎢⎥⎢⎣⎦⎣⎦⎣⎦⎣−−11aa02102a−100a−5⎥⎦因此该二次型函数及对应的对称权矩阵P为正定的条件为a>5。(2)本题二次型函数对应的对称权矩阵P为⎡a11⎤⎢⎥Pb=12−⎢⎥⎢⎣12−c⎥⎦根据赛尔维斯特准则知,由于a11a1Δ=aa,1Δ==−bb,Δ=1−=2abc−−−−4abc41231b12−c因此,该二次型函数及对应的对称权矩阵P为正定的条件为a>−01ab>−044abcabc−−−>04
课后答案网www.khdaw.com5-3判定下列矩阵的正定性。2⎡⎤aa11a2⎡⎤2aaaaa⎢⎥11213(1)⎢⎥2λλ11(,,aaλ≠0)(2)⎢⎥aaa2aa(,,aaa≠0)⎢⎥121⎢⎥12223123aa122⎢⎥2⎢⎥a2⎣⎦aa13aa23a3λ⎣⎦1解(1)对实对称矩阵P作合同变换如下2⎡⎤aaa112⎢⎥2λλ行行:(1)*λ11/aa→→(1)⎡⎤λ1a:(2)/2(2)⎡λλ1111⎤⎡行:(1)(2)−→(1)−0⎤P=⇒⇒⎢⎥11⎢⎥22⎢22⎥⎢⇒⎥⎢⎥aa122列列:(1)*λ11/aa→→(1)⎢⎥2:(2)/2(2)⎢⎥⎢列:(1)(2)−→(1)⎥⎢⎥a2⎢⎥⎣⎦aa22⎢⎣11⎥⎢⎦⎣01⎥⎦⎣⎦λ1因此,当λ>2该二次型函数及对应的对称权矩阵P为正定;当λ=2该二次型函数及对11应的对称权矩阵P为半正定;当λ<2该二次型函数及对应的对称权矩阵P为不定。1(2)对实对称矩阵P作合同变换如下222⎡⎤aaaaa⎡a00aa⎤⎡a0⎤112131131⎢⎥行:(2)(1)*−→aa21/(2)⎢⎥行:(3)(1)*−→aa31/(3)⎢⎥2Pa=⇒⇒aaaa000000⎢⎥12223⎢⎥⎢⎥列列:(2)(1)*−→aa21/(2):(3)(1)*−→aa31/(3)⎢⎥aaaaa22⎢aa00a⎥⎢00⎥⎣⎦13233⎣133⎦⎣⎦因此,该二次型函数及对应的对称权矩阵P为半正定。5
课后答案网www.khdaw.com5-4设有二阶非线性系统为⎧x&1=x2⎨⎩x&2=−sinx1−x2(1)求出所有的平衡态;(2)求出各平衡态处的线性化状态方程,并用李雅普诺夫第一法判断是否为渐近稳定。解(1)对本题,平衡态为代数方程组⎧x=02⎨⎩−sinxx−=012的解,即下述状态空间中的状态为其孤立平衡态⎡⎤±kπx==⎢⎥k0,1,2,3,...e,k⎣⎦0(2)由线性化方法,各平衡态处的线性化状态方程的系统矩阵A为∂fx()⎡⎤01⎡01⎤A==⎢⎥==⎢⎥τk+1∂x⎣⎦−−cosx1⎣(1)−−1⎦xx=e1xk1=±π2k⎡⎤±kπ线性化系统的特征多项式为s+s+(-1),因此,只有平衡态x==⎢⎥k0,2,4,...为渐e,k⎣⎦0⎡⎤±kπ近稳定的,而平衡态x==⎢⎥k135,...,,为不稳定的。e,k⎣⎦06
课后答案网www.khdaw.com5-5设系统的运动方程式为y&&+(1−y)y&+y=0试确定其渐近稳定的条件。解:令x==yx,y&,则状态方程为12⎧x&1=y&=x2⎨x&=y&&=−1(−x)x−x⎩2121原点是唯一的平衡态,初选22Vx()x=+>x012则有2()V&(x)=−2x1−x12当x<1,V&()0x≤。则在原点平衡态的这个邻域范围内,系统是稳定的。进一步,由于1V&()0x≤对所有非零状态轨迹不能恒为零,因此该平衡态为渐近稳定的。7
课后答案网www.khdaw.com5-6试选择适当的李雅普诺夫函数,并利用该函数判定下列非线性系统的稳定性。⎧x&1=x2⎧x&1=x2(1)⎨2(2)⎨⎩x&2=−x1−x1x2⎩x&2=−sinx1−x2⎧⎪x&1=x2(3)⎨&2⎪⎩x2=−a1(+x2)x2−x1,a>022解:(1)显然,原点是给定系统的惟一平衡态,如果选择正定函数V(x)=x1+x2为李雅普诺夫函数,那么沿任意轨迹x(t),V(x)对时间的全导数22Vx&()2x=+=x&&2xxx−2x112212是半负定函数,并且由于V&()x对所有非零初始状态出发的状态轨迹非恒为零,因此,该原点平衡态是渐近稳定的。(2)显然,原点是给定系统的平衡态。下面仅讨论原点平衡态的稳定性问题,其它平衡态22可类似地进行分析。如果选择正定函数Vx()sinx=+xcosx为李雅普诺夫函数,那么沿任121意轨迹x(t),V(x)对时间的全导数2Vx&()x=+2cos(11)(sinx)x&&&12x21(cosx)x2+2x21(sinx)x123=−−2cos()x11()sinxx22x211212()cosx()()(sinx2xcosx+2xsinx1)2=−2cxx21⎡⎤⎣⎦os−xx21()sin2在原点的一个充分小的邻域内,Vx&()2x=−+高阶项,因此V&()x为负定,故系统原点处的2平衡态渐近稳定。(3)原点为系统的平衡态,选李氏函数为:22V(x,t)=x+x12()22则V&(x,t)=2xx&+2xx&=−2a1+xx为半正定,原点平衡态为稳定的。更进一步,112222由于在原点的充分小的邻域内,当x≠,0x=0时,V&(x,t)=0,但此时xx&=≠0,1221故x和Vt&(,)x都不能保持恒定为零。因此,原点平衡态为渐近稳定的。28
课后答案网www.khdaw.com5-7设系统的状态方程为22⎧⎪xxa&=−xxx()+12112⎨22⎪⎩x&=−−xaxxx()+21212试求其V函数,并在a>,0a<0和a=0时,分析平衡点处的系统稳定性。22解)设选择正定函数V(x)=x1+x2为李雅普诺夫函数,那么沿任意轨迹x(t),V(x)对时间的全导数222Vx&()2x=+=x&&2xxa−+2(xx)112212因此,当a>0,V&()x是负定函数,该原点平衡态是渐近稳定的;当a<0,V&()x是正定函数,该原点平衡态是不稳定的;当a=0,V&()x恒为0,该原点平衡态是稳定的,但非渐近稳定的。9
课后答案网www.khdaw.com5-8用李雅普诺夫方法判定下列线性定常系统的稳定性。⎡26⎤⎡01⎤(1)x&=⎢⎥x(2)x&=⎢⎥x⎣−1−5⎦⎣−6−5⎦τ解(1)设选取的李雅普诺夫函数V()xxx=P,其中P为对称矩阵。将P代入李雅普诺夫方程,可得⎡⎤pp1112⎡⎤2621⎡⎤−⎡⎤pp1112⎡10⎤⎢⎥⎢⎥+=⎢⎥⎢⎥−⎢⎥⎣⎦pp1222⎣⎦−−1565⎣⎦−⎣⎦pp1222⎣01⎦解出p11、p12和p22,得⎡⎤pp1112⎡-2.37500.7083⎤P==⎢⎥⎢⎥⎣⎦pp1222⎣0.7083-0.0417⎦经检验,对称矩阵P不为正定矩阵,因此该线性系统不是渐近稳定的。τ(2)设选取的李雅普诺夫函数V()xxx=P,其中P为对称矩阵。将P代入李雅普诺夫方程,可得⎡⎤pp1112⎡⎤0106⎡⎤−⎡⎤pp1112⎡10⎤⎢⎥⎢⎥+=⎢⎥⎢⎥−⎢⎥⎣⎦pp1222⎣⎦−−6515⎣⎦−⎣⎦pp1222⎣01⎦解出p11、p12和p22,得⎡⎤pp1112⎡0.5333-0.5⎤P==⎢⎥⎢⎥⎣⎦pp1222⎣-0.50.7⎦经检验,对称矩阵P为正定矩阵,因此该线性系统是渐近稳定的。10
课后答案网www.khdaw.com5-9线性时变系统的状态方程为。.⎧1x&=−xx+⎪⎪112t⎨⎪x&=−tx−1x212⎪⎩2分析系统在平衡点处的稳定性如何?并求V函数。解:原点是系统的一个平衡态,由TP&()tA=−()()tPtP−()()tAtQ−()t⎡⎤⎡−1/t110⎤其中At()==⎢⎥⎢,Qt()⎥⎣⎦⎣−−t1/201⎦⎡t0⎤解矩阵P得Pt()=⎢⎥。根据根据赛尔维斯特准则有:⎣⎦01t0Δ=>tt0,Δ==>01201该系统在平衡点处是大范围渐近稳定的。其李雅普诺夫函数为T22Vt(,)xx==()()()tPtttxxx+。1211
课后答案网www.khdaw.com5-10用李雅普诺夫方法判定下列线性定常离散系统的稳定性。⎡140⎤⎡01⎤⎢⎥(1)x(k+)1=⎢⎥x(k)(2)x(k+)1=⎢−3−2−3⎥x(k)⎣−.016−1⎦⎢⎣200⎥⎦⎡⎤010⎢⎥(3)x(k+)1=⎢001⎥x(k),k>0⎢k⎥⎢00⎥⎣2⎦解(1)设P为对称矩阵,由李雅普诺夫代数方程:⎡⎤⎡⎤00−.16⎡⎤pp111201⎡⎤pp1112⎡10⎤⎢⎥⎢⎥⎢⎥−=⎢⎥−⎢⎥⎣⎦⎣⎦11−−⎣⎦pp12220.161−⎣⎦pp1222⎣01⎦求解上述方程,解出p11、p12和p22,得⎡⎤pp1112⎡⎤5.0981-3.5328P==⎢⎥⎢⎥⎣⎦pp1222⎣⎦-3.53284.0981经检验对称矩阵P为正定的,因此,系统为大范围渐近稳定的。(2)设P为对称矩阵,由李雅普诺夫代数方程:⎡⎤132−⎡⎤ppp111213⎡140⎤⎡⎤ppp111213⎡100⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥420−−ppp323−−−ppp=−010⎢⎥⎢⎥122223⎢⎥⎢⎥122223⎢⎥⎢⎥030−⎢⎥ppp⎢200⎥⎢⎥ppp⎢001⎥⎦⎣⎦⎣⎦132333⎣⎦⎣⎦132333⎣求解上述方程,解出P,得⎡⎤ppp111213⎡-0.34030.11880.2694⎤⎢⎥⎢⎥Pppp==0.1188-0.1219-0.1219⎢⎥122223⎢⎥⎢⎥ppp⎢0.2694-0.1219-0.3614⎥⎣⎦132333⎣⎦经检验对称矩阵P不为正定的,因此,系统非渐近稳定的。T(3)由李雅普诺夫代数方程GPG−P=−Q,有12
课后答案网www.khdaw.com⎡⎤⎡⎤000⎢⎥⎡ppp111213⎤⎡⎢⎥010ppp111213⎤k⎢⎥⎢⎢⎥⎥⎢⎥10ppp001−ppp⎢⎥2⎢212223⎥⎢⎢⎥212223⎥⎢⎥⎢ppp⎥⎢⎢⎥kppp⎥⎣⎦010⎣313233⎦⎣⎢⎥00313233⎦⎣⎦2⎡⎤−100⎢⎥=−010⎢⎥⎢⎥⎣⎦001−⎡⎤⎢100⎥⎢2⎥⎢k+4⎥解出矩阵P=00⎢2⎥k−4⎢⎥8⎢00−⎥⎢2⎥⎣k−4⎦为使P为正定矩阵,根据根据赛尔维斯特准则,其充要条件是2k−4<0即−<<2k2,可保证系统在原点处是大范围渐近稳定。13
课后答案网www.khdaw.com5-11用克拉索夫斯基法判别下述非线性系统的稳定性。⎧⎪x&=−x−x−x31121⎨3⎪⎩x&2=x1−x2−x2解由于f(x)连续可导且τ3232fxfx()()(=−−−xxx)(+−−xxx)0>121122可取作李雅普诺夫函数,因此,有2∂fx()⎡−−13x−1⎤1J()x==⎢⎥τ2∂x⎣11−−3x⎦22⎡⎤−−26x0JJJˆ()xxx=+=()τ()⎢⎥1<02⎣⎦02−−6x2由矩阵函数Jˆ(x)负定,所以由克拉索夫斯基定理可知,平衡态xe=0是渐近稳定的。14
课后答案网www.khdaw.com5-12用克拉索夫斯基法确定下述系统为大范围渐近稳定时,参数a和b的取值范围。⎧x&1=ax1+x2⎨5⎩x&2=x1−x2+bx2解由于f(x)连续可导且τ252fxfx()()(=++−+axx)(xxbx)12122τττ因此当b≠0时,fxfx()()正定;当b=0时,只要a≠-1,fxfx()()正定.此时,上述fxfx()()可取作李雅普诺夫函数,因此,有∂fx()⎡a1⎤J()x==⎢⎥τ4∂x⎣115−+bx⎦2⎡⎤22aJJJˆ()xxx=+=()τ()⎢⎥<04⎣⎦221−+0bx24因此矩阵函数Jˆ(x)负定的条件为a<0,4(15)40ab−+−x>.所以综上所述,由克拉索夫斯基2定理可知,平衡态xe=0是渐近稳定的条件为:4b≠0,a<0,4(15)40ab−+−x>.2或b=0,a<-115
课后答案网www.khdaw.com5-13用变量梯度法构成下述非线性系统的李雅普诺夫函数,并判别稳定性。⎧⎪x&=−x+2x5x1112⎨⎪⎩x&2=−x2参见5.4.2小节的例题16
课后答案网www.khdaw.com5-14用阿依捷尔曼法判别结构如题图5-14所示的非线性系统的稳定性。题图5-14参见5.4.3小节的例题17
课后答案网www.khdaw.com习题解答6-16-26-36-46-56-66-76-86-96-106-116-126-136-146-156-166-176-18
课后答案网www.khdaw.com6-1对线性系统⎧xx&=+ABu⎨⎩y=+CDxu作状态反馈u=−Kx+v,试推导出闭环系统的状态空间模型和传递函数。解将反馈律代入状态空间模型,则有xx&=ABK+−+()xv=−()ABKxv+Byx=CDK+−+()xv=−()CDKxv+D因此,闭环系统的状态空间模型和传递函数分别为⎧xx&=−()ABK+Bv⎨⎩yx=−()CDK+Dv−1GsCDKsIABKBD()(=−)(−+)+K2
课后答案网www.khdaw.com6-2对线性系统⎧xx&=+ABu⎨⎩y=+CDxu作输出反馈u=-Hy+v,试推导出闭环系统的状态空间模型和传递函数。解将反馈律代入状态空间模型的输出方程,则有yx=CDH+−+()yv=−+CDxyvHD即()I+DHyx=+CDv因此,当(I+DH)可逆时,闭环系统输出方程为−−11y=+()()IDHCxv++IDHD将反馈律和上述输出方程代入状态方程,则有xxu&=+AB=+−+ABHxy()v−−11=−[()ABHIDHC+]xv+[BHIDHDB()++]当闭环系统的状态空间模型和传递函数分别为−−11⎧xxv&=−[()ABHIDHC+]+[BHIDHDB()]++⎨−−11⎩yxv=+()()IDHCID++HD−−11−1−1−1Gs()(=+IDHCsIABHIDHCBHIDHDB)[−+(+)][(+)+++](IDHD)H3
课后答案网www.khdaw.com6-3给定被控系统的状态方程为⎡12⎤⎡1⎤xx&=+⎢⎥⎢⎥u⎣31⎦⎣0⎦试确定一个状态反馈阵K,使闭环系统的极点配置在-2±j处。解1)判断系统的能控性。开环系统的能控性矩阵为⎡11⎤[]BAB=⎢⎥⎣03⎦则开环系统为状态能控,可以进行任意极点配置。2)求能控规范II形:−11TB1==[01][AB][]013−1⎡⎤T11⎡⎤01T==⎢⎥⎢⎥c2⎣⎦TA13⎣⎦31ATAT%==−−11⎡⎤⎢⎥01,BTB%==⎡⎢0⎤⎥cc22c2⎣⎦52⎣1⎦2因此系统开环特征多项式f(s)=s-2s-5,而由期望的闭环极点-2±j所确定的期望的闭环特征多2项式f(s)=s+4s+5,得系统的状态反馈阵K为%−−1**111⎡⎤01⎡816⎤KK==T[-aaaaT-]=[5-(-5)4-(-2)]×⎢⎥=cc2221123331⎢⎥⎣⎦⎣3⎦则在反馈律u=-Kx+v下的闭环系统的状态方程为⎡−−510/3⎤⎡1⎤xx&=+⎢⎥⎢⎥v⎣31⎦⎣0⎦通过验算可知,该闭环系统的极点为-2±j,达到设计要求。4
课后答案网www.khdaw.com6-4给定被控系统的状态方程为⎡⎤2100⎡0⎤⎢⎥⎢⎥02001xx&=+⎢⎥⎢⎥u⎢⎥0020−⎢1⎥⎢⎥⎢⎥⎣⎦0002−⎣1⎦问能否确定一个状态反馈阵K,使闭环系统的极点分别配置在下列位置:(1)s1=-2,s2=-2,s3=-2,s4=-2(2)s1=-3,s2=-3,s3=-3,s4=-2(3)s1=-3,s2=-3,s3=-3,s4=-3解:由于开环系统模型为约旦规范形,因此由模态判据知,该系统特征值2的子系统完全能控,因此2重的开环极点2可以任意配置;而特征值-2对应的2维子系统不完全能控,但由于其对应的2维子系统的能控性矩阵的秩为1,故2重的开环极点-2应有一个可以任意配置,一个不能配置(不能控)。根据上述分析结果,可以判定如下:(1)s1=-2,s2=-2,s3=-2,s4=-2由于期望闭环极点有一个为-2,因此,可以将可任意配置的3个极点配置为-2,而一个不能配置的极点也为-2,符合期望极点要求。故,应存在状态反馈律将闭环极点配置在期望位置上。(2)s1=-3,s2=-3,s3=-3,s4=-2由于期望闭环极点有一个为-2,因此,可以将可任意配置的3个极点配置为-3,而一个不能配置的极点还为-2,符合期望极点要求。故,应存在状态反馈律将闭环极点配置在期望位置上。(3)s1=-3,s2=-3,s3=-3,s4=-3由于期望闭环极点没有-2极点,因此,不存在状态反馈律将不能配置的极点-2还为配置在期望的4个极点的任何一个上。5
课后答案网www.khdaw.com6-5判断下述系统是否能镇定,若能镇定,试设计一个状态反馈使系统成为稳定的。⎡−100⎤⎡0⎤⎡10−1⎤⎡0⎤⎢⎥⎢⎥⎢⎥⎢⎥(1)x&=001x+0u(2)x&=0−20x+0u⎢⎥⎢⎥⎢⎥⎢⎥⎢⎣013⎥⎦⎢⎣1⎥⎦⎢⎣−102⎥⎦⎢⎣1⎥⎦解:(1)先对系统进行能控性分解⎡⎤000⎢⎥rank[]BAB=rank011=<=2n3⎢⎥⎢⎥⎣⎦134表明系统不完全能控,取能控性分解变换矩阵Pc为⎡⎤004⎡03−1⎤⎢⎥−1⎢⎥P=010,P=010c⎢⎥c⎢⎥⎢⎥⎣⎦130⎢⎣0.2500⎥⎦于是可得⎡010⎤⎡1⎤⎢⎥⎢⎥APA%==−1P⎢130⎥;BPB%==−1⎢0⎥ccc⎢001−⎥⎢0⎥⎣⎦⎣⎦原系统的能控性分解为⎡010⎤⎡1⎤⎡⎤x%&1⎢⎥⎢⎡⎤x%1⎥⎢⎥%&=+⎢130⎥⎢⎢⎥%0⎥u⎣⎦x2⎢−⎥⎢⎣⎦x2⎥0010⎣⎦⎣⎦由于该系统的不能控部分只有一个具有负实部的极点-1,因此不能控子系统是稳定的,系统是可镇定的。再对能控部分进行极点配置。由上可知,系统的能控部分为⎡01⎤⎡1⎤A%=⎢⎥,B%=⎢⎥111⎣13⎦⎣0⎦**~~~设A为具有期望特征值的闭环系统矩阵,且A=A11−B1K1,本例中设期望的闭环极点取为-3和-2,因此有AAB*=−=%%%K⎡011⎤⎡−⎢⎥⎡⎤[]kk=−−kk121⎤1111⎢⎥⎢12⎥⎣13⎦⎣⎣⎦013⎦~显然,当反馈阵K1为Kkk%112==[][831]此时,闭环极点为-3和-2。求取原系统的状态反馈镇定矩阵K⎡⎤03−1KKP==⎡⎤%08−1[]310⎢⎥010=[078]⎣⎦1c⎢⎥⎢⎥⎣⎦0.25006
课后答案网www.khdaw.com经检验,状态反馈后得到的如下闭环系统矩阵为镇定的。⎡100⎤⎢⎥ABK−=001⎢⎥⎢⎣065−−⎥⎦(2)先对系统进行能控性分解⎡10−1⎤⎡0⎤⎢⎥⎢⎥x&=0−20x+0u⎢⎥⎢⎥⎢⎣−102⎥⎦⎢⎣1⎥⎦⎡⎤013−−⎢⎥rank[]BAB=rank000=<=2n3⎢⎥⎢⎥⎣⎦125表明系统不完全能控,取能控性分解变换矩阵Pc为⎡⎤010−⎡201⎤⎢⎥−1⎢⎥P=003,P=−100c⎢⎥c⎢⎥⎢⎥⎣⎦120⎢⎣0.1/30⎥⎦于是可得⎡010−⎤⎡1⎤⎢⎥⎢⎥APA%==−1P⎢130⎥;BPB%==−1⎢0⎥ccc⎢002−⎥⎢0⎥⎣⎦⎣⎦原系统的能控性分解为⎡010−⎤⎡1⎤⎡⎤x%&1⎢⎥⎢⎡⎤x%1⎥⎢⎥%&=+⎢130⎥⎢⎢⎥%0⎥u⎣⎦x2⎢002−⎥⎢⎣⎦x20⎥⎣⎦⎣⎦由于该系统的不能控部分只有一个具有负实部的极点-1,因此不能控子系统是稳定的,系统是可镇定的。(2)对能控部分进行极点配置。由上可知,系统的能控部分为⎡01−⎤⎡1⎤A%=⎢⎥,B%=⎢⎥111⎣13⎦⎣0⎦**~~~设A为具有期望特征值的闭环系统矩阵,且A=A11−B1K1,本例中设期望的闭环极点取为-1和-2,因此有AAB*=−=%%%K⎡011−−⎤⎡−⎢⎥⎡⎤[]kk=kk12−1−⎤1111⎢⎥⎢12⎥⎣13⎦⎣⎣⎦013⎦~显然,当反馈阵K1为Kkk%112==[][619]此时,闭环极点为-1和-2。(3)求取原系统的状态反馈镇定矩阵K7
课后答案网www.khdaw.com⎡⎤201KKP==−=⎡⎤%06−1[]190⎢⎥1007[−06]⎣⎦1c⎢⎥⎢⎥⎣⎦0.1/30经检验,状态反馈后得到的如下闭环系统矩阵为镇定的。⎡101−⎤⎢⎥ABK−=−020⎢⎥⎢⎣604−⎥⎦8
课后答案网www.khdaw.com6-6已知系统状态空间模型的各矩阵为⎡010⎤⎡0⎤⎢⎥⎢⎥⎡100⎤A=⎢00−1⎥,B=⎢1⎥,C=⎢001⎥⎣⎦⎢⎣−100⎥⎦⎢⎣0⎥⎦试判断该系统的输出反馈可镇定性。解设输出反馈u=[h1h2]y,因此闭环系统的系统矩阵为⎡⎤0100⎡⎤⎢⎥⎢⎥⎡100⎤ABHC−=⎢⎥0011−−⎢⎥[]hh12⎢⎥⎣001⎦⎢⎥⎣⎦−100⎢⎣0⎥⎦⎡⎤010⎢⎥=−hh01−−⎢⎥12⎢⎥⎣⎦−1003其特征多项式为s+h1s-(1+h2)。由劳斯判据可知,该系统不可能通过输出反馈进行镇定。本题系统为能控能观的,根据定理6-5,其输出反馈可镇定性。9
课后答案网www.khdaw.com6-7已知待解耦的传递函数矩阵为。⎡11⎤−⎢⎥ss+1Gp(s)=⎢s−11⎥⎢⎥⎢⎣s(s+)1s+1⎥⎦试作一前馈补偿器Gc(s)使系统解耦,且其传递函数阵为⎡1⎤0⎢2⎥(s+)1G(s)=⎢⎥⎢1⎥0⎢⎣(s+1)(s+)2⎥⎦解根据6.4.1节的方法,前馈补偿器Gc(s)为−1−1GsGsGsIGscp()=−()()[]()−1⎡⎤11⎡⎤11⎡⎤−01−0⎢⎥⎢⎥22⎢⎥ss+1(1ss++)(1)=⎢⎥⎢⎥⎢⎥⎢⎥s−11⎢⎥11⎢⎥⎢⎥⎢⎥00⎢1−⎥⎣⎦ss(1++)s1⎣⎦(1ss++)(2)⎣(1ss++)(2)⎦⎡⎤1⎡⎤11⎢⎥20(1s+)(1s+−)1=⎢⎥⎢⎥ss−+112⎢⎥−⎢⎥1⎢⎥⎣⎦ss⎢⎥0⎣⎦(1ss++−)(2)1⎡⎤s+1(1s+)⎢⎥21s(ss++2)3s+1=⎢⎥⎢⎥22−+2ss1(1)⎢⎥−22⎣⎦ss(2++)(31sss+)10
课后答案网www.khdaw.com6-8已知状态空间模型的各矩阵为⎡−210⎤⎡00⎤⎢⎥⎢⎥⎡001⎤A=⎢0−20⎥,B=⎢01⎥,C=⎢100⎥⎣⎦⎢⎣004⎥⎦⎢⎣10⎥⎦试判断该系统能否实现状态反馈解耦。若能,求其积分型解耦系统。解:由于CB=[10],1TCB==[00],CAB[01],22可知ll=0,=1。12从而Δ⎡⎤CB1⎡⎤10E==⎢⎥⎢⎥,⎣⎦CAB2⎣⎦01Δ⎡⎤CA1⎡004⎤F==⎢⎥⎢⎥2⎣⎦CA⎣440−⎦2状态反馈解耦控制律的反馈矩阵与前馈矩阵为⎡004−⎤−1KEF==⎢⎥,⎣−440⎦⎡⎤10−1HE==⎢⎥⎣⎦01因此,状态反馈解耦控制闭环系统传递函数阵为⎡⎤s+−2100−1⎡0⎤⎡⎤10−1⎡⎤001⎢⎥⎢⎥⎢⎥sGsCsIABKBH()=−(+)=⎢⎥4s−2001=⎢⎥d100⎢⎥⎢⎥1⎣⎦⎢⎥⎢⎥00s⎢10⎥0⎣⎦⎣⎦⎢⎥2⎣⎦s11
课后答案网www.khdaw.com6-9给定被控系统的状态空间模型为⎡⎤−−−122⎡2⎤⎢⎥⎢⎥xx&=−011+0u⎢⎥⎢⎥⎢⎥⎣⎦101−⎢⎣1⎥⎦yx=[]110试确定一个状态观测器,要求将其极点配置在-2,-2和-3处。解(1)用方法一求解。利用对偶性方法,求得原系统的对偶系统为⎛−⎡⎤101⎡1⎤⎞Σ=(,,)ABC%%%Σ⎜⎟⎢⎥−210,1,[201]−⎢⎥⎜⎟⎢⎥⎢⎥⎜⎟⎢⎥−−2110⎢⎥⎝⎠⎣⎦⎣⎦根据6.2节进行极点配置方法,可计算出对偶系统的状态反馈阵K为K=−[621]即所求状态观测器的反馈阵τTGK==−[621]则相应状态观测器为⎡⎤−−−782⎡2⎤⎡6⎤xxˆˆ&=+⎢⎥211⎢0⎥u+⎢−2(⎥y−yˆ)⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦0111−−⎢⎣⎥⎦⎢⎣1⎥⎦yxˆˆ=[110]12
课后答案网www.khdaw.com6-10给定被控系统的状态空间模型为⎡⎤120⎡2⎤⎢⎥⎢⎥xx&=−311+1u⎢⎥⎢⎥⎢⎥⎣⎦020⎢⎣1⎥⎦yx=[]001试设计一个降维状态观测器,要求将观测器的极点配置在-3和-5处。解(1)由于输出C已为规范形式,则系统各矩阵可分解为如下形式⎡120⎤⎡2⎤⎢⎥⎢⎥AB=−⎢311⎥⎢=1⎥⎢020⎥⎢1⎥⎣⎦⎣⎦C=[]001(2)因此,降维状态观测器的特征多项式为%%⎡⎤12⎡⎤L1fs()|=−=−−sIF|sI()A11LA21=−sI⎢⎥+⎢⎥[]02⎣⎦31−⎣⎦L2sL−−122+12==sL+27s−−26LL+221−+31sL+22(3)由给定的期望特征值得期望的特征多项式为*2fss()(3)(5)=++=++sss815*令f(s)=f(s),则可得⎡⎤L1⎡5⎤L==⎢⎥⎢⎥⎣⎦L2⎣4⎦(4)故,可得降维状态观测器的各矩阵为⎡⎤125⎡⎤⎡⎤18−FAL=−=11A21⎢⎥−⎢⎥[]02=⎢⎥⎣⎦314−−⎣⎦⎣⎦39⎡05⎤⎡⎤⎡1852−−⎤⎡⎤⎡⎤7GAL=−+=−×+AFL⎢⎥⎢⎥0⎢⎥⎢⎥⎢⎥=1222⎣14⎦⎣⎦⎣3942−−⎦⎣⎦⎣⎦0⎡⎤⎡⎤25⎡⎤−3HBL=−=−×=B⎢⎥⎢⎥1⎢⎥12⎣⎦⎣⎦14⎣⎦−3于是所得的降维状态观测器为⎡18−−−⎤⎡⎤⎡⎤273z&=++=FGHzyu⎢⎥⎢⎥⎢⎥z+y+u⎣39−−−⎦⎣⎦⎣⎦203⎡⎤⎡105⎤⎡⎤zy+L⎢⎥⎢⎥xzˆ==+⎢⎥014yy⎢⎥⎢⎥⎣⎦⎢⎥⎢⎣⎦⎣001⎥⎦13
课后答案网www.khdaw.com6-11给定被控系统的状态空间模型为⎡⎤010⎡0⎤⎢⎥⎢⎥xx&=+0010u⎢⎥⎢⎥⎢⎥⎣⎦−−−243⎢⎣1⎥⎦yx=[]142该系统的状态不能直接测量,试设计一个带状态观测器的状态反馈系统,要求将其状态观测部分的极点配置在-5,-7和-8处,状态反馈部分的极点配置在-1,-2和-3处。解:根据6.2节求解极点配置方法,得到反馈矩阵为K=[473];再根据6.5节求解状态观测T器反馈矩阵的方法,得到反馈矩阵为G=[-353/3260/3-106]。因此,所设计的带状态观测器的状态反馈系统的状态反馈律:ux=−+[473]ˆv状态观测器为⎧−⎡⎤010⎡⎤03⎡53/3⎤⎪&⎢⎥⎢⎥⎢⎥⎪xxˆˆ=+0010u+260/3(y−yˆ)⎨⎢⎥⎢⎥⎢⎥⎪⎢⎥⎣⎦−−−243⎢⎥⎣⎦1⎢⎣−106⎥⎦⎪⎩yxˆˆ=[]14214
课后答案网www.khdaw.com习题解答7-17-27-37-47-57-67-77-87-97-107-117-127-137-147-15
课后答案网www.khdaw.com7-1应用拉格朗日乘子法求下列二次型函数ττJ(,)xu=+xxuuQR在n维线性向量方程fxu(,)=Ax+=BCu约束条件下的极值点。其中x和u分别为n维和m维的变量向量;Q和R分别为n×n维和m×m维的正定的常数矩阵;A和B分别n×n和n×m常数矩阵;C为n维常数向量。并证明满足必要条件的点是极小值点。解先定义如下拉格朗日函数τττLQ(,)xλ=+++xxuuRλ(AxuB−C)式中,λ为n维拉格朗日乘子向量,那么∂Lτ=20QAx+=λ∂x∂Lτ=20RBu+=λ∂u因此,有1−1τx=−QAλ21−1τu=−RBλ2由约束条件,有11−−11ττAxu+=BA−QABλλ−RB=C22即−1−−11ττλ=−2⎡⎤AQABRB+C⎣⎦由上述λ的表达式,可得x和u的解如下−1−−−111τττx=+QAAQABRB⎡⎤C⎣⎦−1−−−111τττu=+RBAQABRB⎡⎤C⎣⎦−−1τ1τ只要矩阵A和B其中之一行满秩,则矩阵AQABRB+是可逆的,此时上述解成立。由极值问题的充分条件可知,由于2**2**⎡⎤∂∂LL(,,)xuλ(,,)xuλ⎢⎥∂∂xxττ∂∂xu⎡⎤Q0⎢⎥=⎢⎥>02*LL(,,)*2*(,,)*0R⎢⎥∂∂xuλxuλ⎣⎦⎢⎥ττ⎣⎦∂∂ux∂∂uu时,上述极值为极小值。���2
课后答案网www.khdaw.com7-2求函数22J()xxx=+12在不等式约束2222(4xxxx−)+≤4,(1−+≤)21212条件下的最大值。解先定义库恩-塔哈克函数如下222222Lxy(,,λλ,)=++xxλ[(x−+−+4)4x]λ[(x−+−1)2x]1212112212根据库恩-塔哈克定理,极小值的必要条件如下:∂L=+2(xxλλ28−+)(22x−=)0,11121∂x1∂L=++=2220xxxλλ21222∂x222λλ[(xx−+−=4)4]0,≥0112122λλ[(xx−+−=1)2]0,≥0212222(4xx−+−≤)40,1222(1xx−+−≤)2012现在依次考虑下述4种可能情况:(1)λ1=λ2=0,即在两个不等式约束的边界之内求解。此时,则由∂L=20x=,1∂x1∂L=20x=2∂x2解得x1=x2=0。由于该问题的第一个不等式约束条件不满足,因此,不是极小解。(2)λ1=0,λ2>0。因此,有∂L=2(xx+−λ22)=0,121∂x1∂L=+=220xxλ222∂x222(1xx−+−=)2012解得⎧⎧⎪⎪xx=+12=−12⎪⎪11⎪⎪⎨⎨xx==0,022⎪⎪⎪⎪12+−12λλ=−=22⎪⎪⎩⎩22经检验,上述2个均故不是极小值解。(3)λ1>0,λ2=0。因此,有3
课后答案网www.khdaw.com∂L=2(xx+−λ28)=0,111∂x1∂L=+=220xxλ212∂x222(4xx−+−=)40,12解得⎧⎧xx=62=11⎪⎪⎨⎨xx=0,=022⎪⎪⎩⎩λλ=−=1/3111经检验,上述第一个解不满足λ1>0,因此不是极小值解。第二个解满足所有条件,其为极小值解。(4)λ1>0,λ2>0。因此,有∂L=+2(xxλλ28−+)(22x−=)0,11121∂x1∂L=++=2220xxx21λλ222∂x222(4xx−+−=)40,1222(1xx−+−=)2012解得⎧⎧⎪⎪xx==13/613/611⎨⎨,⎪⎪⎩⎩xx==23/6−23/622经检验,上述2个解均不是极小值解。综上所述,该极值问题的解为⎧x=21⎨。⎩x=024
课后答案网www.khdaw.com7-3求如下泛函问题的极值曲线π/222(1)Jx[()]⋅=∫(x&−xt)dx(0)1,(/2)=xπ=2012(2)Jx[()]⋅=∫(x&+12)dtxtx(0)0,(1)2=x=0221+x&(3)Jx[()]⋅=∫dtx(0)1,(2)0=x=0x解(1)因为F函数不显含自变量t,因此极值曲线的解满足F−x&Fx&=C1代入F函数,有22x&&−xxxC−=(2)&1则有22x&=±−−Cx=±Cx−12解得x=+ktksin()12根据边界条件,可解得kk=±5a=±rcsin(1/5)12d(2)由欧拉方程Fx−Fx&=0,有dtd12tx−(2)&=0dt即&&x=6t则有3x=tC++tC12根据边界条件,可解得3x=tt+221+x&Jx[()]⋅=∫dtx(0)1,(2)0=x=0x(3)由于泛函的被积函数F不显含自变量t,因此极值曲线的解满足F−x&Fx&=C1将F代入该方程,有21+xx&&−x&=C1xxx1+&2经整理,可得2x1+xC&=2引入参变量ξ,令x&=ctgξ,于是上式可表示为5
课后答案网www.khdaw.comC2xC==sinξ321ctg+ξ又由dxCcosξ3ddtC==ξ=sinξξd3x&ctgξ积分得tC=−+cosξC34即该泛函问题的极值曲线解满足tC=−cosξ+CxC=sinξ343即222x+()tC−=C43由边界条件,可确定CC=±5/4=3/4346
课后答案网www.khdaw.com7-4已知线性系统的状态方程为⎡01⎤⎡⎤10xx&=+⎢⎥⎢⎥u⎣00⎦⎣⎦01其边界条件为⎡⎤1x(0)==⎢⎥,x(2)02⎣⎦1求u(t),使性能指标泛函12τJu=∫()()dtutt20为最小。解本例中末态约束条件为g(x(tf),tf)=x2(2)=0因此,相应的哈密顿函数和辅助性能指标泛函中的末值项分别为1τHt(,,,,)xx&uλ=+utut()()λ()xux+−&&+λ()ux−12112222Stt((),)x=μx(2)ff2根据定理7-7,可得该最优控制的如下方程和边界条件xtxtut&()=+()()121xtut&()=()22&∂Hλ()t=−=01∂x&1&∂Hλ()tt=−=−λ()21∂x&2xx(0)1==(0)112x(2)=02∂∂ggλ(2)==μ0λ(2)==μμ12∂∂xx12∂H=+=uλ011∂u1∂H=+=uλ022∂u2由上述方程可求得如下解析解*ut()0=1*1ut()=−221*2x()tt=−+t+114*txt()=−+1227
课后答案网www.khdaw.com7-5已知被控系统x&=u,其初始条件为x(0)=1。试求u(t)和tf,使系统在tf时刻转移到x(tf)=0,且使如下性能指标泛函极小tf22Jt=+utt()df∫0解首先构造哈密顿函数如下2Hxu(,,,)λtuu=+λ由极值条件可解得u=-λ/2。将其代入规范方程,可得xu&=,λ&==-0∂H∂x并写出边界条件如下xx(0)1=()t=0f2ut()+λ()()2tut=−tffff从而解得**133*tu==3()tx−=2()t−21t+f28
课后答案网www.khdaw.com7-6已知线性系统的状态方程为⎧xx&=⎡1⎤12⎨x(0)=⎢⎥⎩xu&=⎣1⎦2系统的在未定末态时刻tf的末态条件分别为2(1)x()tt=−1ff2(2)xt()=−=txt()012fff试分别求使系统转移到上述末态条件的最优控制u(t),并使性能指标泛函tf2Ju=∫()dtt0为最小。解(1)首先构造哈密顿函数如下2Hxu(,,,)λtuxu=++λλ122由极值条件可解得u=-λ2/2。将其代入规范方程,可得xxxu&&======λ&&-0∂HHλ-∂−λ122121∂∂xx12解得λ=C11λ=−CtC+212CC12ut=−22CC122xtt=−+C2342CC1232x=tt−++CtC134124并写出边界条件如下xx(0)1==(0)1122xt()=−t1ffτ2∂∂Stt((),)xg((),)xtt∂[()xtt+]ffff1ffλμ()t=+μ==μ1f∂∂∂xx()ttx()()tff1fτ2∂∂Stt((),)xg((),)xtt∂[()xtt+]ffff1ffλμ()t=+μ==02f∂∂∂xx()ttx()()tff2fτ∂S((),)xgtt∂((),)xtt2ffffut()++=λλ()()txt()()tut−−μ=−2t+μff12ff2ff∂∂ttff**由边界条件可以求出待定常数Ci,从而解得最优控制u(t)和最优状态轨迹x(t)。(2)首先构造哈密顿函数如下2Hxu(,,,)λtuxu=++λλ122由极值条件可解得u=-λ2/2。将其代入规范方程,可得9
课后答案网www.khdaw.comxxxu&&======λ&&-0∂HHλ-∂−λ122121∂∂xx12解得λ=C11λ=−CtC+212CC12ut=−22CC122xtt=−+C2342CC1232x=tt−++CtC134124并写出边界条件如下xx(0)1==(0)1122xt()=−txt()0=12fffτ2∂∂Stt((),)xg((),)xtt∂[()]xtt+∂xt()ffff12fffλμ()t=+μ=+μ=μ1f121∂∂∂∂xx()ttx()()tx()tff11ffτ2∂∂Stt((),)xg((),)xtt∂[()]xtt+∂xt()ffff12fffλμ()t=+μ=++μμ=2f122∂∂∂xx()ttx()()t∂xt()ff2f2fτ∂∂Stt((),)xg((),)xtt2ffffut()++=λ()()txtλμ()()tut−−μ=−2t+ff12ff2ff1∂∂ttff**由边界条件可以求出待定常数Ci,从而解得最优控制u(t)和最优状态轨迹x(t)。10
课后答案网www.khdaw.com7-7已知被控系统状态方程x&=u控制变量不等式约束|u(t)|≤1,试试利用极大值原理求使系统从初始状态x(0)=1转移到x(tf)=0,且使性能指标泛函tf22Jt=+xtt()df∫0为最小的最优控制和最优轨线。解该问题的哈密顿函数为2Hxu=+λ运用极大值原理***Httt(x(),(),λux())=minHttt((),(),())λuu()tU∈*2=+minxuλ1()1≤≤ut*2=+xuminλ1()1≤≤ut解得⎧−1(λt)0>ut*()=⎨⎩+1(λt)0<由于本问题时寻求控制律使系统从初始状态x(0)=1转移到末态x(tf)=0,因此,考虑系统的状态方程为x&=u,从初始状态x(0)=1出发时的一段时间内,系统的最优控制律必为*u(t)=-1;此时状态轨线为*x(t)=-t+1由协态方程&∂Hλ=−=−=21xt−∂x得12λλ()ttt=−+(0)λ()0t>02*若系统控制量到达x(tf)=0之前无切换,即没有从-1切换到+1,则只要tf=1,x(1)=0,此时22tf124Jt=+xtt()d1=+−+(t1)dt=f∫∫003可以证明,若发生切换,不管切换多少次,使系统从初始状态x(0)=1转移到末态x(tf)=0的控**制规律的性能指标函数值必定大于没有发生过切换的u(t)=-1。因此u(t)=-1为最优控制且tf=1。11
课后答案网www.khdaw.com7-8已知被控系统状态方程和性能指标泛函分别为x&&&=xxxxu==12233t22fJ=+txt()xtt()dff21∫0约束条件为τ(1)x(0)[100]=(2)x()tx=()t,xt()0=12ff3f(3)|()|1ut≤tf2(4)∫utt()d1=0试写出最优控制的必要条件,其中末态时刻tf未定。参见习题7-712
课后答案网www.khdaw.com7-9某一阶被控系统的状态方程为x&=0.5xu+=x(0)x0试证明−tft*1−eeut()=−xt()−tft2(1+ee)是使性能指标泛函1tf−t22Je=+∫[()2()]xtutdt20为最小的最优控制律。解对本问题,各系统状态空间模型和二次型、性能指标函数各矩阵如下−−ttABQRF====[0.5,][1,]⎡⎤⎣⎦e,[2e],=[0]−tft*1−ee因此,若ut()=−xt()为最优控制规律,应满足黎卡提微分方程。由于最优−tft2(1+ee)−t−tf*1−τee−二次型控制律为u()tR=−BPx()t,因此该控制律的P=应满足如下黎卡提微分−tft1+ee方程τ−1τP&()tP=−()tA−AP()tP+()tBRBP()tQtt−,∈[,]t0fP()tF=f即tt2−P&()tP=−()te+P()/2tett−,∈[,]t0fPt()0=f−t−tfee−将P=代入上述黎卡提方程,等式左右两边相等,边界条件也成立。根据微分−tft1+ee−t−tfee−方程解理论,微分方程解惟一存在,因此P=为该二次型最优控制问题的黎卡提方−tft1+ee−tft*1−ee程的解,ut()=−xt()为最优控制律。−tft2(1+ee)13
课后答案网www.khdaw.com7-10某一阶被控系统的状态方程和初始条件为xu&=x(1)=3性能指标泛函为1522Jx=+(5)∫utt()d21试求使J最小的最优控制律。解对本问题,各系统状态空间模型和二次型、性能指标函数各矩阵如下ABQRF=====[0,][1,][0,][1],[1]因此求解黎卡提代数方程τ−1τP&()tP=−()tA−AP()tP+()tBRBP()tQtt−,∈[,]t0fP()tF=f得1P=6−t因此,最优反馈控制律为*1−τ1ux()tR=−BP()t=−x()t6−t闭环系统状态方程为−1τxx&()tAB=−⎡⎤RBP()t⎣⎦⎡⎤1=−1(xt)⎢⎥⎣6−t⎦5−t=x()t6−t14
课后答案网www.khdaw.com7-11某一阶被控系统的状态方程和初始条件为x&=xu+=x(0)x0性能指标泛函为1tf22J=+∫[2()xtutt()]d20试求使J最小的最优控制律。解对本问题,各系统状态空间模型和二次型、性能指标函数各矩阵如下ABQRF=====[1,][1,][2,][1],[0]因此求解黎卡提代数方程τ−1τP&()tP=−()tA−AP()tP+()tBRBP()tQtt−,∈[,]t0fP()tF=f得23tCe(13−−)13−P=23tCe1−其中13+-23tfC=e13−即23(tt−f)−+2e2P=23(tt−f)(1+−3)e(1−3)因此,最优反馈控制律为23(tt−f)*−1τ−2e+2ux()tR=−BP(t)(=−xt)2()3tt−f(1+−3)e−(13)闭环系统状态方程为−1τxx&()tAB=−⎡⎤RBPt()⎣⎦⎡⎤−+2e23(tt−f)2=−⎢⎥1x(t)23(tt−f)⎢⎥⎣⎦(1+−3)e(1−3)23(tt−f)(3+−3)e(3−3)=x(t)23(tt−f)(1+−3)e(1−3)15
课后答案网www.khdaw.com7-12某一阶被控系统的状态方程为⎧x&=x12⎨⎩x&=u2性能指标泛函为1∞22Jx=+[()()]tutdt∫120试求使J最小的最优控制律。解对本问题,各系统状态空间模型和二次型、性能指标函数各矩阵如下⎡⎤01⎡⎤0⎡⎤10AB==⎢⎥,,⎢⎥QR==⎢⎥,[1]⎣⎦00⎣⎦1⎣⎦00因此求解黎卡提矩阵代数方程τ−1τPA+AP−PBRBP+Q=0得⎡21⎤P=⎢⎥⎢⎣12⎥⎦因此,最优反馈控制律为*1=−−τ=−⎡⎤ux()tRBP()t12()xt⎣⎦闭环系统状态方程为−1τxx&()tAB=−⎡⎤RBP()t⎣⎦⎡⎤01=⎢⎥x()t⎣⎦−−1216
课后答案网www.khdaw.com7-13如题图7-14所示的街道,图中数字表示相应的街道长度,试求从起点S到终点F的最短路线。题图7-13某街道路线图解由动态规划法逆向求解,各点到终点的最佳路径与最短路径值如下图所示。1914721723145711102015
课后答案网www.khdaw.com7-14已知被控系统的状态方程和初始条件分别为x(k+1)=x(k)u(k)+u(k)x(0)=1其中u(k)是控制变量,它只能在-1、0和+1三者之间取值。给定的性能指标泛函为2Jx=+|(3)|∑[|()|3|()1|]xk++ukk=0极小化。试用动态规划法先列出递推方程,然后求出最优控制序列u*(0),u*(1)和u*(2)的显式解。解采用搜索路径的图解法,求解过程如图所示,节点内的数字为各时刻状态变量的值,弧线上的数字表示各步性能指标函数,即为|()|3|()1|xk+uk+,红线表示各状态下一步的最优策略,红色数字表示最优性能指标值。从图上可知,最优策略为u(k)=-1,k=0,1,2;最优状态轨迹为{1,-2,1,-2}944836266322572731411166144010003360011-111-1253-225-286-359-4418
课后答案网www.khdaw.com7-15已知被控系统的状态方程x(k+1)=x(k)+u(k)和初始条件x(0)=x0x(N)=xf给定的性能指标泛函为N−12Ju=+∑1(k)k=0极小化。试用动态规划法先列出递推方程,然后求出最优控制律。解由离散系统最优控制问题的贝尔曼逆向递推方程,可得**2*JxkukN[(),(,−=1)]min{1+ukJk()+[(xu+1),*(kN+−1,1)]}kNN=−−1,2,...u()kU∈*JxNN[(),)]0=由状态方程x(k+1)=x(k)+u(k)可得N−1xf=+xu0∑()kk=0因此,本题的最优控制问题等价于求N−12Ju=+∑1(k)k=0在约束条件N−1xf=+xu0∑()kk=0下的最优控制问题。因此,该问题的最优解为x−xf0uk()=,k=0,1,2,…,N-1N19'
您可能关注的文档
- 宏观经济学 (多恩布什 著) 人民大学出版社 课后答案 第一篇 课后答案
- 测控电路课后习题答案(张国雄_第四版)
- 文学概论 (童庆炳 著) 高等教育出版社 课后答案
- 《现代控制理论》第三版(刘豹 唐万生)课后习题答案 机械工业出版社
- 我国商业银行信贷风险管理研究
- 宏观经济学 (吴文盛 著) 清华大学出版社 课后答案
- 无存储危险化学品单位安全管理制度(正文)
- 测量学课后习题答案中国矿业大学出版(高井祥)
- 宏观经济学 第四版 英文 (布兰查德 著) 清华大学出版社 课后答案
- 复变函数 第四版 (余家荣 著) 高等教育出版社 课后答案
- 无机材料科学基础 (陆佩文 著) 武汉工业大学出版社 课后答案
- 《线性代数》 第三版 (卢刚 著) 课后习题答案 高等教育出版社
- 复变函数论 第三版 (钟玉泉 著) 高等教育出版社 课后答案
- 互换性与测量技术基础 (胡凤兰 著) 高等教育出版社 课后答案
- 无机材料科学基础_天津大学课后习题答案
- 曾谨言量子力学导论习题答案
- 互换性与测量技术基础 第2版 (毛平淮 著) 机械工业出版社 课后答案
- 《线性代数》同济大学第四版课后习题答案
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明