
- 146.04 KB
- 2022-04-22 11:45:25 发布


- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
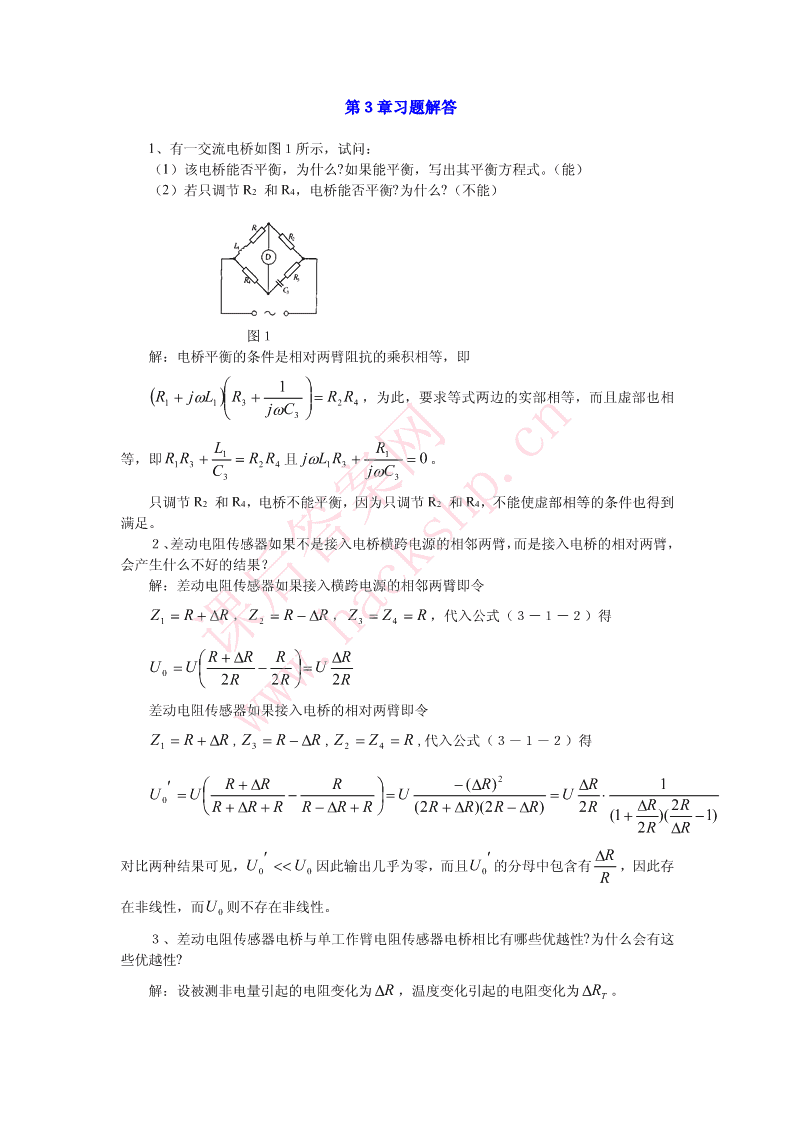
'第3章习题解答1、有一交流电桥如图1所示,试问:(1)该电桥能否平衡,为什么?如果能平衡,写出其平衡方程式。(能)(2)若只调节R2和R4,电桥能否平衡?为什么?(不能)图1解:电桥平衡的条件是相对两臂阻抗的乘积相等,即⎛1⎞()R+jωL⎜R+⎟=RR,为此,要求等式两边的实部相等,而且虚部也相11⎜3jωC⎟24⎝3⎠LR11等,即RR+=RR且jωLR+=0。132413CjωC33只调节R2和R4,电桥不能平衡,因为只调节R2和R4,不能使虚部相等的条件也得到满足。2、差动电阻传感器如果不是接入电桥横跨电源的相邻两臂,而是接入电桥的相对两臂,会产生什么不好的结果?解:差动电阻传感器如果接入横跨电源的相邻两臂即令Z=R+ΔR,Z=R−ΔR,Z=Z=R,代入公式(3-1-2)得1234⎛R+ΔRR⎞ΔRU0=U⎜课后答案网−⎟=U⎝2R2R⎠2R差动电阻传感器如果接入电桥的相对两臂即令www.hackshp.cnZ=R+ΔR,Z=R−ΔR,Z=Z=R,代入公式(3-1-2)得13242′⎛R+ΔRR⎞−(ΔR)ΔR1U0=U⎜−⎟=U=U⋅⎝R+ΔR+RR−ΔR+R⎠2(R+ΔR)(2R−ΔR)2RΔR2R1(+)(−)12RΔR′′ΔR对比两种结果可见,U<
您可能关注的文档
- 2004.9-2010.9计算机等级考试_三级网络技术历年真题 答案-hackshp (1)
- 初二 暑假作业 下册 (泽霖 著) 山东文艺出版社 课后答案
- 概率论与数理统计浙江大学第四版-课后习题答案(完全版)
- 初级财务管理 (郝成林 著) 中国铁道出版社 课后答案
- 感测技术基础 第二版 (孙传友 孙晓斌 著) 电子工业出版社 课后答案 第1章习题解答
- 化工原理 (杨祖荣 著) 高等教育出版社 课后答案
- 2009年 税法 (中国注册会计协会 著) 经济科学出版社 课后答案
- 初级会计实务 (张志凤 著) 北京大学出版社 课后答案
- 感测技术基础 第二版 (孙传友 孙晓斌 著) 电子工业出版社 课后答案 第2章习题解答
- 化工原理 第二版 上册 (柴诚敬 著) 高等教育出版社 课后答案
- 2010考研数学经典讲义 (经济类) 习题详解 (曹显兵 刘喜波 著) 中国人民大学出版社 课后答案
- 化工原理 第三版 (陈敏恒 著) 化学工业出版社 课后答案
- 初中二年级 数学 上册 课程导报 (课程导报 著) 课程导报 课后答案
- 感测技术基础 第二版 (孙传友 孙晓斌 著) 电子工业出版社 课后答案 第4章习题解答
- 物理化学课后习题答案(傅献彩_第五版)
- 2010年大学物理练习(施建青_徐志君_林国成)参考解答之五--
- 化工原理 第三版 (王志魁 著) 化学工业出版社 课后答案
- 感测技术基础 第二版 (孙传友 孙晓斌 著) 电子工业出版社 课后答案 第5章习题解答
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看