

- 957.99 KB
- 2022-04-22 11:47:21 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
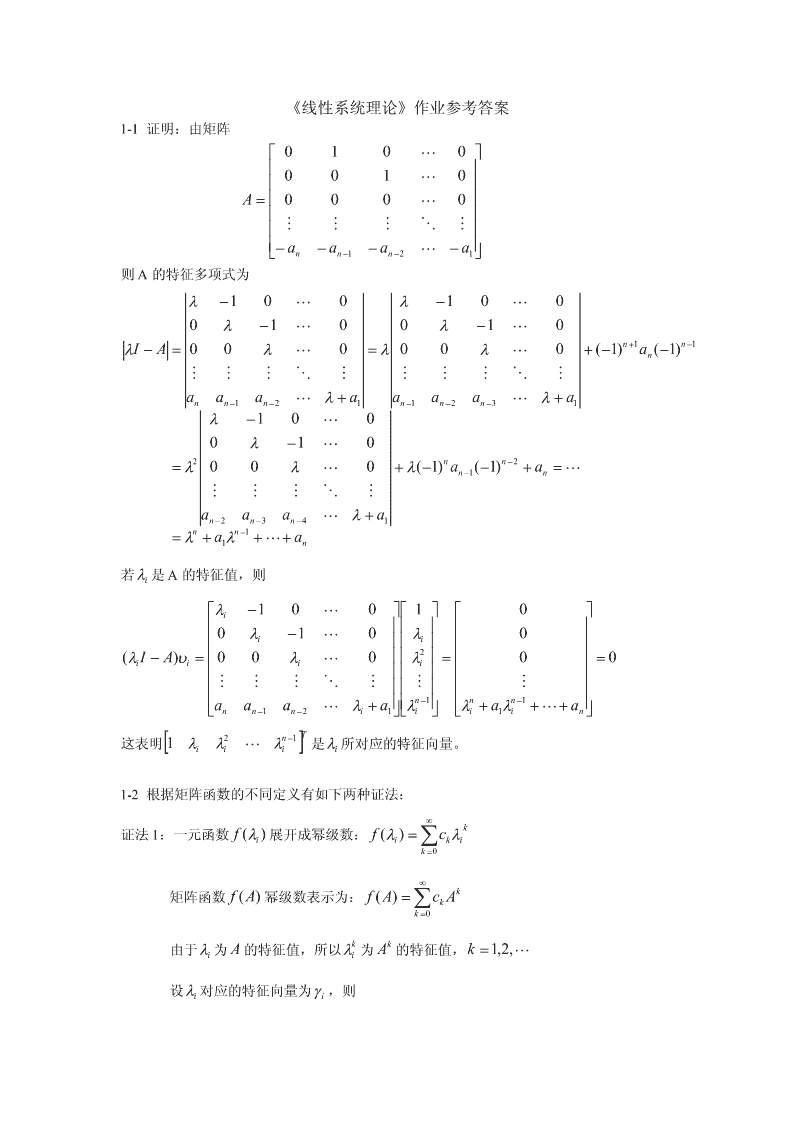
'《线性系统理论》作业参考答案1-1证明:由矩阵é010L0ùêú001L0êúA=ê000L0úêúêMMMOMúê-a-a-aL-aúënn-1n-21û则A的特征多项式为l-10L0l-10L00l-1L00l-1L0n+1n-1lI-A=00lL0=l00lL0+(-1)a(-1)nMMMOMMMMOMaaaLl+aaaaLl+ann-1n-21n-1n-2n-31l-10L00l-1L02nn-2=l00lL0+l(-1)a(-1)+a=Ln-1nMMMOMaaaLl+an-2n-3n-41nn-1=l+al+L+a1n若l是A的特征值,则iéli-10L0ùé1ùé0ùêúêúêú0l-1L0l0êiúêiúêú2(lI-A)u=ê00lL0úêlú=ê0ú=0iiiiêúêúêúêMMMOMúêMúêMúêaaaLl+aúêln-1úêln+aln-1+L+aúënn-1n-2i1ûëiûëi1inû2n-1T这表明[1llLl]是l所对应的特征向量。iiii1-2根据矩阵函数的不同定义有如下两种证法:¥k证法1:一元函数f(li)展开成幂级数:f(li)=åcklik=0¥k矩阵函数f(A)幂级数表示为:f(A)=åckAk=0kk由于l为A的特征值,所以l为A的特征值,k=1,2,Lii设l对应的特征向量为g,则ii
¥¥¥kkkf(A)gi=åckAgi=åckligi=(åckli)gi=f(li)gik=0k=0k=0所以f(l)是f(A)的一个特征值。i证法2:根据矩阵函数定义,设p(l)是函数f(z)在l(A)上的Hermite插值多项式,则-1f(A)=p(A)=Pdiag(p(J),Lp(J))P,1s因为p(l)=f(l),所以p(J)=f(J),i=1,2,L,s。ii其中é1¢1(ni-1)ùp(l)p(l)Lp(l)êi1!i(n-1)!iúiêúp(l)OMp(J)=êiúiê1úOp¢(l)ê1!iúêëp(l)úûini´nié1¢1(ni-1)ùf(l)f(l)Lf(l)êi1!i(n-1)!iúiêúf(l)OMf(J)=êiúiê1úOf¢(l)ê1!iúêëf(l)úûini´ni-1f(A)=p(A)=Pdiag(f(J),Lf(J))P。1s可以看出,f(l)是f(A)的一个特征值。i441-3解:(1)特征多项式为D(l)=(l-l),最小多项式为Y(l)=(l-l);111124(2)特征多项式为D(l)=(l-l)(l-l)(l-l)=(l-l),111112最小多项式为Y(l)=(l-l);11224(3)特征多项式为D(l)=(l-l)(l-l)=(l-l),11112最小多项式为Y(l)=(l-l)。11
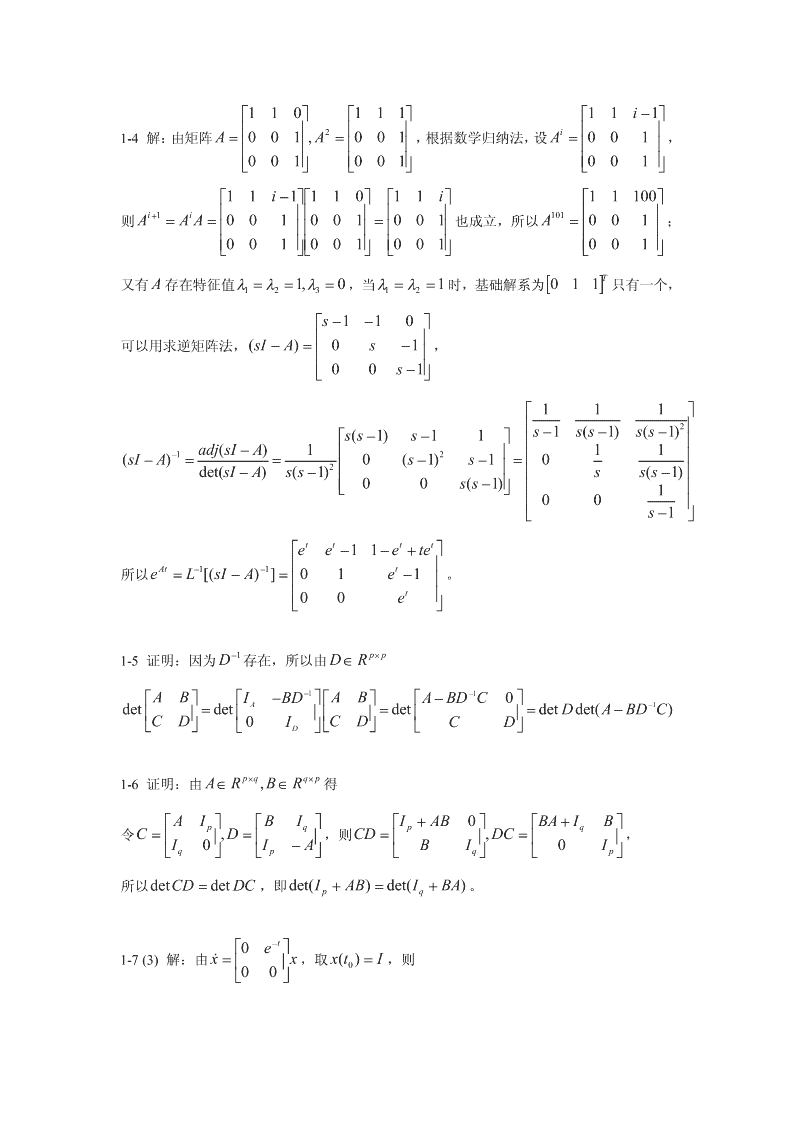
é110ùé111ùé11i-1ùêú2êúiêú1-4解:由矩阵A=001,A=001,根据数学归纳法,设A=001,êúêúêúêë001úûêë001úûêë001úûé11i-1ùé110ùé11iùé11100ùi+1iêúêúêú101êú则A=AA=001001=001也成立,所以A=001;êúêúêúêúêë001úûêë001úûêë001úûêë001úûT又有A存在特征值l=l=1,l=0,当l=l=1时,基础解系为[011]只有一个,12312és-1-10ùêú可以用求逆矩阵法,(sI-A)=0s-1,êúêë00s-1úûé111ùês-1s(s-1)s(s-1)2úés(s-1)s-11ùêú(sI-A)-1=adj(sI-A)=1ê0(s-1)2s-1ú=ê011údet(sI-A)s(s-1)2êúêss(s-1)úêë00s(s-1)úûê1úê00úës-1ûttttéee-11-e+teùAt-1-1êtú所以e=L[(sI-A)]=ê01e-1ú。ê00etúëû-1p´p1-5证明:因为D存在,所以由DÎR-1-1éABùéI-BDùéABùéABDC-0ùA-1detêú=detêúêú=detêú=detDdet(ABDC-)ëCDûë0IDûëCDûëCDûp´qq´p1-6证明:由AÎR,BÎR得éAIpùéBIqùéIp+AB0ùéBA+IqBù令C=êú,D=êú,则CD=êú,DC=êú,I0I-ABI0Iëqûëpûëqûëpû所以detCD=detDC,即det(I+AB)=det(I+BA)。pq-té0eù1-7(3)解:由x&=êúx,取x(t0)=I,则ë00û
-t-tìx&=ex,x(t)=1ìx&=ex,x(t)=011211101222120í,íx&=0,x(t)=0x&=0,x(t)=1î21210î22220解得ìx=1ìx=-e-t+e-t0é1-e-t+e-t0ù1112í,í即x=êúîx21=0îx21=1ë01ûé1-e-t+e-t0ùé1-e-t+e-t0ù-1Y(t)=x=êú,F(t,t0)=Y(t)Y(t0)=êúë01ûë01û1-8证1:QAB=BA¥¥¥¥At1kk1kk1kk1kkAtBe=BåAt=åBAt=åABt=(åAt)B=eBk=0k!k=0k!k=0k!k=0k!x&=e-AtBeAtx=e-AteAtBx=BxF(t,t)=eB(t-t0)0A+BABBA而QAB=BAe=e×e=e×ee-Ate(A+B)(t-t0)eAt0=e-AteA(t-t0)eB(t-t0)eAt0=e-AteAte-At0eB(t-t0)eAt0=e-At0eB(t-t0)eAt0=e-At0eAt0eB(t-t0)=eB(t-t0)=F(t,t)0证毕。At-At证2:取x=ex=T(t)xx=ex-At-At-At两边求导得x&=-Aex+ex&=eBx即x&=(A+B)x其状态转移矩阵为F(t,t)=e(A+B)(t-t0)0根据相似矩阵性质得F(t,t)=T-1(t)F(t,t)T(t)=e-Ate(A+B)(t-t0)eAt00001-9解:由题可得A,B,C的值,则é1-1sùês+3(s+1)(s+3)(s+1)(s+2)(s+3)úêú(sI-A)-1=ê011úês+1(s+1)(s+2)úê1úê00úës+2û传递函数阵为2és+4s+2-2ùêúG(s)=C(sI-A)-1B=(s+1)(s+2)(s+3)(s+1)(s+2)(s+3)êúê11úêës+2s+2úû
脉冲响应阵为é1-(t-t)-2(t-t)1-3(t-t)-(t-t)-2(t-t)-3(t-t)ùG(t-t)=L-1[G(s)]=ê-e+2e-e-e+2e-eú22ê-2(t-t)-2(t-t)úëeeû22é(s+1)(2s+1)(s+1)ù1-10解:最小公分母为g(s)=s(s+1),N(s)=G(s)g(s)=êúës(s+1)2s+1û21其行列式因子为D(s)=1,D(s)=(s+1)(s-1)(s+)122D2(s)21则其不变因子为d(s)=1,d(s)==(s+1)(s-1)(s+)12D(s)21é10ù其Smith标准型为S(s)=ê2ú,ë0(s+1)(s-1)(s+1/2)ûé1ù0S(s)ês(s+1)2ú所以McMillan标准型为GM(s)==êúg(s)ê0(s-1)(s+1/2)úêësúû1则传递函数阵地零点为z=1,z=-,极点为p=p=0,p=p=-1。1212342é100ùé0ùê2úêú1-11解:P(s)=0s(s+1)s(s+2),Q(s)=s,R(s)=[00-1],W(s)=0êúêúêë00s+2úûêë-1úû2系统的特征方程为detP(s)=s(s+1)(s+2)=0,则系统的极点为0,0,-1,-2。-11系统的传递函数阵为G(s)=R(s)P(s)Q(s)+W(s)=,故传递函数阵的极点s+2为-2,无零点。21s(s+1)G(s)==,即系统的零点为0,0,-1。2s+2s(s+1)(s+2)kk1-12证:QCAB=CAB111222¥¥A1(t-t)1kk1kkC1eB1=C1(åA1(t-t))B1=åC1A1B1(t-t)k=0k!k=0k!¥¥1kk1kkA2(t-t)=åC2A2B2(t-t)=C2(åA2(t-t))B2=C2eB2k=0k!k=0k!又QD=DG(t-t)=G(t-t)1212
所以两个系统零状态响应等价。1-16解1:QF&(t,t)=A(t)F(t,t),F(0)=I00F&(0)=AF(0)=Aé1-t3t1-t3tù(-e+3e)(e+3e)ê24úé11ù即A=F&(0)=ê1ú=êúêe-t+3e3t(-e-t+3e3t)úë41ûë2ût=0At-1-1解2:QF(t)=e=L[(sI-A)]és-11ù-1ê(s+1)(s-3)(s+1)(s-3)ú(sI-A)=êú4s-1êúêë(s+1)(s-3)(s+1)(s-3)úûés-1-1ùé11ù(sI-A)=êúA=êúë-4s-1ûë41û1-19b)证1:Qtr(A)=0¹2=tr(A)12A与A不相似,两系统不可能等价。12证2:由D¹D知两系统不等价。122-3解:∵系统在t时刻可控0t1TT∴格兰姆矩阵W(t,t)=F(t,t)B(t)B(t)F(t,t)dt非奇异c01ò00t0对于任给的初始状态x(t),构造如下容许控制输入0TT-11u(t)=-B(t)F(t,t)W(t,t)(x(t)-F(t,t)x),则0c01001t1x(t)=F(t,t)[x(t)+F(t,t)B(t)u(t)dt]1100ò0t0t1TT-11=F(t,t)[x(t)-F(t,t)B(t)B(t)F(t,t)W(t,t)(x(t)-F(t,t)x)dt]100òt00c010010-11=F(t,t)[x(t)-W(t,t)W(t,t)(x(t)-F(t,t)x)]100c01c010011=x1∴可以将系统状态转移到x¹0。111若要使系统状态保持在x,即x&=A(t)x+B(t)u=0,即B(t)u=-A(t)x有解,
1由于x¹0,所以这个很难保证。é1a+bùéCùé10ù2-7(1)解:由题意得rank[BAB]=rankêú=2,rankêú=rankêú=2ë1c+dûëCAûëabû∴使a+b¹c+d,系统完全可控;使b¹0,系统完全可观。é0110ùêú2-8解:rank(B)=2,rank[BAB]=1000=3=n,所以可控性指数m=2;êúêë0030úûé101ùêúéCù010rank(C)=2,rankêú=êú=3=n,所以可观性指数为n=2。ëCAûê04-1úêúë001û2-13解1:存在。因为(A,b)可控,将它化成可控标准形,得(A,b),变换阵为T。若令cc1可控标准形的输出矩阵c=[10L0],则系统(A,c)可观。令c=cT,则系统cccc1(A,c)可观。-1解2:由(A,b)可控可得,(sI-A)b行线性独立。T-1T-1T-1T取c=b[(sI-A)](sI-A),则c(sI-A)=b[(sI-A)]列线性独立,即(A,c)可观。é10-2ùé1ùTêúêúT注意:不能直接取c=b,反例:A=020,b=1,c=b=[111]êúêúêë003úûêë1úûé1-1-7ùé111ùêúêú此时rankU=rank124=3,rankV=rank121=2,系统可控不可êúêúêë139úûêë141úû观。2-15证明:充分性:∵(A-bk,b)对所有k可控,∴当k=0时,(A,b)可控。必要性:∵(A,b)可控,则rank[sI-A,b]=n
又∵[sI-(A-bk),b]与[sI-A,b]相抵(列初等变换)则rank[sI-(A-bk),b]=rank[sI-A,b]=n根据PBH秩判据,(A-bk,b)对所有k可控。3-1解:(1)首先验证该系统可控可观。é2-44ùé-0.502ù2êú-1êúU=[bAbAb]=01-2,U=-1-12êúêúêë1-11úûêë-0.5-11úûTépnùé-0.5-11ùêTúêúT=pA=0.52-1,1ênúêúêpTA2úê-0.5-32úënûëû如此得可控标准形为é010ùé0ù-1êúêú-1A=TAT=001,b=Tb=0,c=cT=[-132]c11êúc1êúc1êë-1-3-3úûêë1úû22s+3s-1由此可得,系统的传递函数阵为g(s)=32s+3s+3s+1由于系统是可观可控的,根据传递函数阵可直接得到可观标准形é00-1ùé-1ùêúêúA=10-3,b=3,c=[001]oêúoêúoêë01-3úûêë2úû(2)首先验证该系统可观可控。é124ùé-120ù2êú-1êúU=[bAbAb]=112,U=-3-12êúêúêë247úûêë20-1úûTépnùé20-1ùêTúêúT=pA=-1-11,1ênúêúêpTA2úê010úënûëû如此得可控标准形为é010ùé0ù-1êúêú-1A=TAT=001,b=Tb=0,c=cT=[478]c11êúc1êúc1êë111úûêë1úû
28s+7s+4由此可得,系统的传递函数阵为g(s)=32s-s-s-1由于系统是可观可控的,根据传递函数阵可直接得到可观标准形é001ùé4ùêúêúA=101,b=7,c=[001]oêúoêúoêë011úûêë8úûé0100ùé0ùêúêú001003-3解:g(s)的可控标准形实现为:A=êú,b=êú,c=[1001]ê0001úê0úêúêúë-1-30-2ûë1ûécùé1001ùêúêúcA-1-20-2rankêú=rankêú=42êcAúê25-24úê3úêúëcAûë-4-105-10û该系统既可控又可观,故此实现为最小实现。(另可由g(s)无零极点相消判断其为最小实现)é11ùé11ùé10ùês+1s+3úês+1s+3ú3-5(1)解:G(s)=êú+ê11ú,令G¢(s)=ê11úë11ûê--úê--úës+1s+2ûës+1s+2û32方法1:G¢(s)各元的最小公分母为g(s)=s+6s+11s+61æé62ùé54ùé11ù2öG¢(s)=ççêú+êús+êús÷÷g(s)èë-6-3ûë-5-4ûë-1-1ûøé001000ùé00ùêúêú00010000êúêúê000010úê00úG(s)的可控标准形实现为A1=êú,B1=êúê000001úê00úê-60-110-60úê10úêúêúêë0-60-110-6úûêë01úûé625311ùé10ùC=ú,D=ú1ê1êë-6-3-5-4-1-1ûë11û经验证rankV=3,系统不可观测。在V中选取3个线性无关行,另外再选取3个线11
é625311ùêú-6-3-5-4-1-1êúê-6-6-5-9-1-3ú性无关的行,得变换阵T1=êúê100000úê010000úêúêë001000úûé001100ùé11ùêúêú-1.5-2-0.5000-1-1êúêúê-30-4000úê-1-3ú-1则A1=T1A1T1=êú,B1=T1B1=êú,ê000001úê00úê-1-100-10úê00úêúêúêë1.500.5-60-5úûêë00úû-1é100000ùC=CT=111êúë010000ûé001ùé11ùêúêúé100ùé10ù最小实现为:A=ê-1.5-2-0.5ú,B=ê-1-1ú,C=êú,D=êúë010ûë11ûêë-30-4úûêë-1-3úû-1-2-3方法2:(汉克尔阵法)G¢(s)=hs+hs+hs+L,其中123é11ùé-1-3ùé19ùé-1-27ùé181ùh=ú,h=ú,h=ú,h=ú,h=ú1ê2ê3ê4ê5êë-1-1ûë12ûë-1-4ûë18ûë-1-16ûé11-1-319ùêú-1-112-1-4êúê-1-319-1-27ú作汉克尔阵H(a,b)=êú,rankH(a,b)=3,ê12-1-418úê19-1-27181úêúêë-1-418-1-16úû故最小实现维数为3,根据变换阵取法,得é11-3ùé-1-39ùé11ùêú*êúé11-3ùêúF=-1-12,F=12-4,F=ú,F=-1-1êúêú1ê-1-122êúëûêë-1-39úûêë19-27úûêë-1-3úû最小实现为é001ùé11ù*-1êúêú-1é100ùA=FF=-1.5-2-0.5,B=F=-1-1,C=FF=ú,êú2êú1ê010ëûêë-30-4úûêë-1-3úû
é10ùD=êú,经验证(A,B,C)完全可控可观测。ë11û方法3:és+21ùé11ùG(s)=ês+1s+3ú=ês+1s+3ú+é10ùêss+1úê11úê11úêúê--úëûës+1s+2ûës+1s+2û1é10ù1é00ù1é01ùé10ù=êú+êú+êú+êús+1ë-10ûs+2ë0-1ûs+3ë00ûë11û1é1ù1é0ù1é1ùé10ù=êú[10]+êú[0-1]+êú[01]+êús+1ë-1ûs+2ë1ûs+3ë0ûë11û所以G(s)的Jordan形实现(最小)é-1ùé10ù&êúêú,yé101ùXé10ùuX=ê-2úX+ê0-1úu=êú+êúë-110ûë11ûêë-3úûêë01úû22-11és+4s-42(s-1)ù3-6解:G(s)=C(sI-A)B=2ê22ú(s-1)(s-2)ë2s+s-22(s-1)û在(1)中,G(s)=G(s);而在(2)中,G(s)¹G(s),故该实现是(1)的实现,经验证(A,B,C)完全可控可观测,所以此实现为最小实现。-tìx&=ex1-e-t1-e-tï11ìïx1=x1(0)eéx1ùée0ùéx1(0)ù4-1解:í1,解得í,即x=êú=êúêúïx&2=x2ïîx2=x2(0)(t+1)ëx2ûêë0t+1úûëx2(0)ûît+1-t1-e因为e趋于定值,而t+1是发散的,则系统在x=0处不稳定,因而不是一致稳定、渐进稳定、一致渐进稳定的。4-2证明:对于系统x&=A(t)x,F&(t,t)=A(t)F(t,t)00T而l(s)=maxl[A(s)+A(s)],则md[FT(t,t)F(t,t)]=F&T(t,t)F(t,t)+FT(t,t)F&(t,t)000000dtTT=F(t,t)(A(t)+A(t))F(t,t)00T£l(t)F(t,t)F(t,t)m00
dF(t,t)dF(t,t)00即£l(t)F(t,t),£l(t)dtm0mdtF(t,t)0t两边求积分得:lnF(t,t)£ldt=-a(t-t)+C,即F(t,t)£eCe-a(t-t0)0òm00t0即存在N=eC>0,a>0,使得对于t³t,有F(t,t)£Ne-a(t-t0)100所以系统是一致渐进稳定的,对于线性系统x&=A(t)x是按指数稳定的。2t4-5证明:由状态方程解得:x=xe,则当t®¥时,x(t)®¥,故系统的解不稳定。02222tttt将等价变换x=ex代入状态方程,的2tex+ex&=2tex,即x&=0变换后的系统是稳定的,因此等价变换不能保证稳定性不变。-14-6证明:原系统平衡状态稳定,则F(t,t)有界,因为T(t),T(t)均有界,则经李雅0-1-1普诺夫变换后,F(t,t)=T(t)F(t,t)T(t)£T(t)F(t,t)T(t),即F(t,t)0000有界,故稳定性不变;-1原系统渐进稳定,则limF(t,t)=0,则limF(t,t)=limT(t)F(t,t)T(t)=0,000t®¥t®¥t®¥故渐进稳定性亦不变。同理,若原系统不稳定,则变化下的系统也不稳定。2举例:令x=tx,则x=t-1x,代入状态方程得:-t-2x+t-1x&=2x,解得x=xtet,0所以,若原系统不稳定,在李雅普诺夫变换下系统依然不稳定。4-7解:(1)由系统得é1-101.1ùé-10-10ùêúêú01-1.10.111101rankU=rankêú=4,rankV=rankêú=4ê1010úê0-1.1-10úêúêúë0-10-1ûë-1.10.1101û所以系统可控可观测。2D(s)=(s+1)(s-1)(s+1.1s+1.1),知系统有一个特征值为1,不满足Rel(A)<0,则系统平衡状态不稳定,不是渐近稳定。又由于系统可控可观测,所以BIBS不稳定,BIBO不稳定,总体不稳定。é1ù0(6)将G(s)化为Smith-McMillan形:GM=ês(s+1)(s+2)(s+3)úêúë0s-4û系统传递函数阵的极点为0,-1,-2,-3。由于包含极点0,所以系统不是渐近稳定
的。由于G(s)中有元素的极点中包含0,则系统BIBO不稳定,因而系统BIBS不稳定,总体不稳定。对于系统是否平衡状态稳定,则需要判断系统的特征方程D(s)的根,若D(s)中实部为零的根所对应的初等因子是一次,而其余根均有负实部,则系统平衡状态稳定,否则不稳定。4-8解:x=0是系统唯一的平衡状态。122取V(x,t)=[x+(t+1)x],则V(x,t),V&(x,t)对x,t存在且连续,且V(0,t)=0。1221t+1当x¹0时,x£V(x,t)£x,所以V(x,t)正定且有界;22V&(x,t)=1[2xdx1+(t+1)2xdx2+x2]=-1(20t+19)x2£0,当x任意,x=0t1222122dtdt2ìx&1=x2=0时,V&(x,t)=0,除此之外均有V&(x,t)<0。将x=0代入方程ï1,tt2íx&=-x-10xïî2t+112可见除(0,0)点之外,(x,0)不是系统受绕运动的解。1当x®¥时,V(x,t)®¥。所以系统原点平衡状态是大范围渐近稳定的。4-9解:系统的特征方程为:D(s)=det(sI-A)32=s-(a+a+a)s+(aa+aa+aa-a)s-aaa-aa+aa1122331122223311221311223312231322根据劳斯判据,令b=c=-(a+a+a)121112233-aaa-aa+aa+(a+a+a)(aa+aa+aa-a)1122331223132211223311222233112213b=c=231a+a+a112233c-aaa-aa+aa4111223312231322b==3c-(a+a+a)21112233构成许瓦兹矩阵:é010ùêúB=-b01,系统系数阵A与许瓦兹矩阵B具有相同的特征多项式。ê3úê0-b-búë21û
é000ùêúT取Q阵为Q=000³0,显然xQx沿任意非零解不恒为0。êú2ê002búë1ûéb1b2b300ùTêúT由李雅普诺夫方程BP+PB=-Q,解得P=0bb0,当P=P>0时,ê12úê00búë1û系统x&=Bx渐进稳定,这时系统x&=Ax也渐近稳定。即当b>0,b>0,b>0时,系123统大范围渐近稳定。TTTTTT4-10解:令V(x)=xPx,V&(x)=x&Px+xPx&=x(AP+PA)x=-xWx,即解李雅éb1b2b300ùTP=ê0bb0ú普诺夫方程AP+PA=-W,得ê12ú。ê00-búë1ûéb1b2b300ùTêú所以,V(x)=x0bb0xê12úê00-búë1ûV(x)正定的条件为b<0,b<0,b>0。1235-1证明:由于det(I+AB)=det(I+BA)-1det(sI-A)-det(sI-A-bc)det(sI-A)-det[(sI-A)(I-(sI-A)bc)]=det(sI-A)det(sI-A)-1-1-1=1-det[I-(sI-A)bc]=1-det[1-c(sI-A)b]=c(sI-A)bé01412ùêú12485-2解:rankU=rankêú=3<4,所以系统是不完全可控的。ê1-11-1úêúë1-11-1ûé0140ùé-2/35/94/90ùêúêú1240-1/34/9-4/90对系统进行可控形分解,取T-1=êú,T=êúê1-110úê1/31/91/90úêúêúë1-111ûë00-11û
é00-40ùé1ùêúêú10000可得A=TAT-1=êú,b=êú。可以看出-1为不可控极点,不能ê0130úê0úêúêúë000-1ûë0û进行配置,所以题中可以将极点配置在(-2,-2,-2,-1)和(-2,-2,-1,-1),但不能配置在(-2,-2,-2,-2)。32对于(-2,-2,-2,-1),可控部分特征多项式det(sI-A)=s-3s+4,而11332f(s)=(s+2)=s+6s+12s+8,则c-1-1ìéa2a11ùüìé100ùé0-31ùüé001ùï2êúïïêúêúïêúT=í[b11A11b11A11b11]êa110úý=íê010úê-310úý=ê013úïîêë100úûïþïîêë001úûêë100úûïþêë139úûé001ùêúk=kT=[-4-12-9]013=[-9-39-121],11êúêë139úû所以k=[-9-39-121a],其中a是任意常数。232对于(-2,-2,-1,-1),f(s)=(s+2)(s+1)=s+5s+8s+4,则cé001ùk=[0-8-8]ê013ú=[-8-32-96]1êúêë139úû所以k=[-8-32-96b],其中b是任意常数。5-4解:由g(s)可得系统的可控标准形实现为é010ùé0ùêúêúx&=001x+0u,y=[-211]x。êúêúêë65-2úûêë1úû由于系统可控,可以利用状态反馈改变极点,但不能改变零点。因此可以将极点配置在(-2,-2,-3),以形成零极点对消,故希望的特征多项式为232f(s)=(s+2)(s+3)=s+7s+16s+12c从而得反馈阵K=[-6-12-5-162-7]=[-18-21-5]。
é00001125ùêú0011255115-6(2)解1:rankU=rankêú=4,所以系统完全可控。ê11255111227úêúë01001147û432闭环系统希望的特征多项式为f(s)=s+7s+18s+22s+12,构造状态反馈阵é0010ùêúê0120úé0000ù-1é0000ùK,取W=,S=ú,则K=SW=ú1ê1êê1251úë0010ûë1000ûêúë0011û432所以det(sI-A-BK)=s-2s-s-s-91构造变换阵-1ìéa3a2a11ùüïêúïï[23]êa2a110úïT=íb1(A+BK1)b1(A+BK1)b1(A+BK1)b1ýêa100úï1ïêúïîë1000ûïþé-1/3001/3ùêú1000=êúê0100úêúë0010ûé[-21-23-19-9]Tùé-16-19-9-7ùK=ú=ú2êêë0000ûë0000ûé-16-19-9-7ùK=K+K=ú。12êë1000ûé0012ùêú0125解2:rank[bAbA2bA3b]=rankêú=41111ê12512úêúë0014û由于(A,b)可控,K可省去。11432闭环系统希望的特征多项式为f(s)=s+7s+18s+22s+12。432det(sI-A)=s-2s-s-6,构造变换阵
-1ìéa3a2a11ùüé-1/2001/2ùïêúïêúï[23]êa2a110úïê1000úT=íb1Ab1Ab1Ab1ý=êa100úê0100úï1ïêúêúïîë1000ûïþë0010ûé[-18-22-19-9]Tùé-13-19-9-9ùK=K=ú=ú2êêë0000ûë0000ûé0100ùé00ùêúêú001000解3:Qm=3,m=1,系统x&=êúx+êúu为龙伯格第二可控形。12ê-3123úê11úêúêúë2100ûë01û32f(s)=(s+3)(s+1-j)(s+1+j)=s+5s+8s+6,f(s)=s+212ék11k12k13k14ù设计状态反馈阵K=êú,使得kkkkë21222324ûA+BK=é0100ùé0100ùêúêú00100010êú=êúê-3+k+k1+k+k2+k+k3+k+kúê-6-8-50ú1121122213231424êúêúë2+k211+k22k23k24ûë000-2ûé-1-8-7-1ù解得K=K=êúë-2-10-2ûé101010ùêú5-7(3)解:rankU=rank010-204=2<3,所以系统不完全可控。êúêë000000úûé100ù-1êú对系统进行可控性分解,得A=TAT=0-21,可见系统的不可控极点在êúêë00-2úû左半平面,所以系统可用状态反馈实现镇定。é100ùêúrankV=rank100=1<3,所以系统不完全可观测。êúêë100úû
é100ù-1êú对系统进行可观测性分解,得A=TAT=0-21,可见系统的不可观测极êúêë00-2úû点在左半平面,所以系统是可检测的。
'
您可能关注的文档
- 索达吉堪布《入菩萨行论》讲座第04品036-046 思考题问题及答案.doc
- 纺纱习题答案.doc
- 线性代数 (陈建龙 著) 科学出版社 课后答案.pdf
- 线性代数(经济数学2)_习题集(含答案).doc
- 线性代数+同济大学+第四版+课后答案[1].docx
- 学第四版_课后答案.doc
- 习题答案_邹庭荣_李仁所_张洪谦.doc
- 线性代数答案.doc
- 线性代数简明教程第二版 陈维新课后答案 无水印版.pdf
- 练习答案+参考译文:《研究生英语综合教程上》1-6单元.doc
- 练习题汇总(2).doc
- 组网技术与网络管理课后答案.doc
- 细胞学习题及解答.doc
- 细胞生物学习题与解答.doc
- 经干院《统计练习册》习题答案.doc
- 经济学原理 吴海燕(普通高校经济及管理学科规划教材) 习题答案.doc
- 经济学基础习题答案(第四版)刘华.doc
- 经济学导论习题答案.docx
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明