

- 840.85 KB
- 2022-04-22 13:46:59 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn汽车节能驾驶辅助优化研究**郑榕,舒红,王圆熙,高峰(重庆大学汽车工程学院,重庆400044)5摘要:为了使汽车节能驾驶辅助系统能够更好的用于实时应用,运用动态规划方法,建立以最低油耗为主要目标,兼顾加速舒适性、动力性需求和避免频繁换挡的预测性油耗优化模型。对汽车起步加速工况和平路-爬坡工况进行优化计算,得到预测性油耗优化策略,并与基于AT综合换挡规则的控制策略对比;分析节能驾驶辅助系统的实时提示功能,并对减小加速实时提示进行仿真。仿真研究结果表明该节能驾驶辅助系统节油效果显著。10关键词:车辆工程;节能驾驶辅助;动态规划;车速优化中图分类号:中图分类号:U461.8文献标识码:AStudyofVehicleFuel-savingDrivingAssistanceOptimization15ZhengRong,ShuHong,WangYuanxi,GaoFeng(SchoolofAutomotiveEngineering,ChongqingUniverstiy,ChongQing400044)Abstract:Forbetterreal-timeapplicationsofFuel-savingDrivingAssistanceSystem,apredictiveoptimizationmodeloffuelconsumptionisbuiltupbyusingdynamicprogrammingmethod,whichthemaintargetisthelowestfuelconsumption,withtheperformancedemand,acceleration20comfortandavoidingfrequentshiftingtakingintoaccount.Thevehicleoptimalcomputationattheaccelerationandroad-climbingconditionarecarriedout,andtheresultofpredictivefuelconsumptionoptimizationstrategyiscomparedwiththecontrolstrategyoftheATshiftrule.Finally,real-timemessagefunctionofFuel-savingDrivingAssistanceSystemisanalyzed,andreal-timeoperationofreducingaccelerationsimulationiscarriedout.Theresearchresultsshow25thefuel-savingeffectisremarkable.Keywords:AutomotiveEngineering;Fuel-savingDrivingAssistance;DynamicProgramming;SpeedOptimization0引言30汽车节能驾驶辅助系统对驾驶员操作行为的经济性进行评价,并对不节能驾驶行为给出操作提示,以改善不良驾驶行为,降低燃油消耗。在降低油耗的方案中,相对车身技术的改[1]进,改善驾驶员对油门、档位等操纵可以节约15%左右的燃油,且投入也较低。相关节能[2][3-4]驾驶培训研究也表明生态驾驶行为的节油潜力在10%到30%之间。节能驾驶辅助系统根据经验规则给出节能驾驶操作提示,如减小加速率、提前换挡等,平均节油可达10%。35因此,节能驾驶辅助系统的研究具有重要的理论价值和应用前景。[5]动态规划法目前在经济性最优驾驶应用十分广泛。Hellstrom等采用动态规划法针对重[6]卡设计一种基于道路地理信息,以最优油耗为目标的预见性档位提醒系统。R.K等基于动[7]态规划法设计了考虑交通信号的经济车速控制系统。MensingF等采用三维动态规划法在NEDC工况下获得最优速度曲线的节能驾驶模式,与原始驾驶模式进行仿真对比,可以实现[8]40油耗节省16%,但其计算时间长,不能用于实时应用。王建强运用动态规划算法提出基于实时道路坡度信息的经济车速优化方法,相较定速巡航平均节油效果达到5%。传统节能驾驶辅助系统未考虑未来行驶过程汽车状态的变化,且由于语音播报时间和驾作者简介:郑榕(1992-),女,研究生,汽车辅助驾驶通信联系人:舒红(1963-),女,副教授,汽车辅助驾驶.E-mail:shuhong@cqu.edu.cn-1-
中国科技论文在线http://www.paper.edu.cn驶员反应时间的存在,驾驶员对驾驶行为做出的调整存在滞后性,不能达到较好的节油效果。因此,对汽车未来行驶过程的最优经济车速和档位进行预判,并提供预见性提示的节能驾驶45辅助系统,在降低能源消耗和减少排放的过程中有非常重要的意义。本文以一款具有手自一体换挡功能的6速AT变速器SUV为研究对象,运用动态规划原理提出兼顾燃油经济性和动力性需求的节能驾驶辅助优化模型,对起步加速工况和平路-爬坡工况进行仿真。1动力传动系统建模50根据发动机台架稳态试验数据建立发动机数值模型。为提高计算效率,对发动机单位时间油耗模型进行拟合,得到拟合公式(1),其拟合方程相关系数为0.99941,数值模型与拟合模型的对比如图1所示。2222Q=(q+qT+qn+qT+qn+qnT)1/(+qT+qn+qT+qn+qnT)(1)t13e5e7e9e11ee2e4e6e8e10ee式中Qt为单位时间油耗(ml/s);Te为发动机转矩(N.m);ne为发动机转速(r/min)。55)25)25-120-12015151010Qt/(ml.s5Qt/(ml.s500油耗油耗5000500040002504000200250转速3000150200转速3000100150ne/2000100050100(N.m)ne/20001000050(N.m)(r.min0转矩Te/(r.m转矩Te/-1)发动机in-1)发动机(a)数值模型(b)拟合模型图1发动机单位时间油耗模型Fig.1Fittingmodelofenginefuelconsumptionperunittime60液力变矩器闭锁时,泵轮与涡轮直连,液力变矩器未闭锁时,发动机与泵轮联合工作。根据联合工作点得到不同节气门开度α下涡轮转速nt和泵轮转速np的关系,如图2所示。)-160005000/(r.min4000e3000200010000n发动机转速7560005040005000节气门开253000度a010002000(r·min-1)/%0速nt/涡轮转图2不同节气门开度下涡轮与泵轮转速关系图65Fig.2Therotatespeedgraphofpumpimpellerandturbineunderdifferentthrottlepercentage选用车速与节气门开度作为控制参数,分别以瞬时加速度最大和瞬时油耗最低为目标,[9]建立汽车动力性换挡规则和经济性换挡规则。综合考虑汽车行驶中经济性和动力性需求制-2-
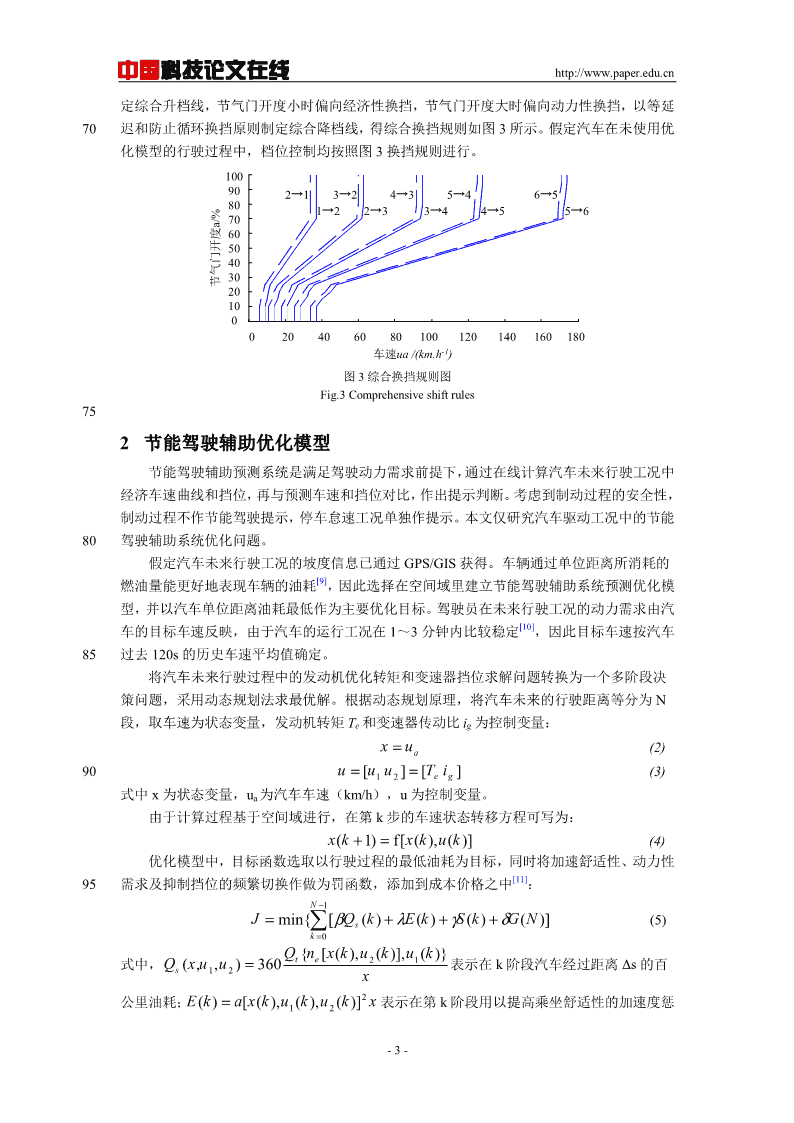
中国科技论文在线http://www.paper.edu.cn定综合升档线,节气门开度小时偏向经济性换挡,节气门开度大时偏向动力性换挡,以等延70迟和防止循环换挡原则制定综合降档线,得综合换挡规则如图3所示。假定汽车在未使用优化模型的行驶过程中,档位控制均按照图3换挡规则进行。100902→13→24→35→46→5801→22→33→44→55→67060504030节气门开度a/%20100020406080100120140160180车速ua/(km.h-1)图3综合换挡规则图Fig.3Comprehensiveshiftrules752节能驾驶辅助优化模型节能驾驶辅助预测系统是满足驾驶动力需求前提下,通过在线计算汽车未来行驶工况中经济车速曲线和挡位,再与预测车速和挡位对比,作出提示判断。考虑到制动过程的安全性,制动过程不作节能驾驶提示,停车怠速工况单独作提示。本文仅研究汽车驱动工况中的节能80驾驶辅助系统优化问题。假定汽车未来行驶工况的坡度信息已通过GPS/GIS获得。车辆通过单位距离所消耗的[9]燃油量能更好地表现车辆的油耗,因此选择在空间域里建立节能驾驶辅助系统预测优化模型,并以汽车单位距离油耗最低作为主要优化目标。驾驶员在未来行驶工况的动力需求由汽[10]车的目标车速反映,由于汽车的运行工况在1~3分钟内比较稳定,因此目标车速按汽车85过去120s的历史车速平均值确定。将汽车未来行驶过程中的发动机优化转矩和变速器挡位求解问题转换为一个多阶段决策问题,采用动态规划法求最优解。根据动态规划原理,将汽车未来的行驶距离等分为N段,取车速为状态变量,发动机转矩Te和变速器传动比ig为控制变量:x=u(2)a90u=[uu]=[Ti](3)12eg式中x为状态变量,ua为汽车车速(km/h),u为控制变量。由于计算过程基于空间域进行,在第k步的车速状态转移方程可写为:x(k+)1=[fx(k),u(k)](4)优化模型中,目标函数选取以行驶过程的最低油耗为目标,同时将加速舒适性、动力性[11]95需求及抑制挡位的频繁切换作做为罚函数,添加到成本价格之中:N−1J=min{[βQs(k)+λE(k)+γS(k)+δG(N)](5)k=0Q{n[x(k),u(k)],u(k)}te21式中,Q(x,u,u)=360表示在k阶段汽车经过距离Δs的百s12x2公里油耗;E(k)=a[x(k),u(k),u(k)]x表示在第k阶段用以提高乘坐舒适性的加速度惩12-3-
中国科技论文在线http://www.paper.edu.cn[12]2[13]罚函数;S(k)=[u(k)−u(k+1)]表示在第k阶段抑制频繁换挡的惩罚函数;22100G(N)=[x(N)−u]2表示位于行驶循环的终端,与目标车速误差相关联的惩罚函数,uafaf是行驶循环所期望的车速;β、λ、γ、δ依次为油耗函数、舒适性惩罚函数、频繁换挡惩罚函数和驾驶动力需求惩罚函数的权重系数。约束条件包括对发动机转矩转速,汽车加速度和车速的约束:T(k)≤T(k)≤T(k)e_minee_maxn(k)≤n(k)≤n(k)e_minee_maxa(k)≤a(k)≤a(k)(6)mingmaxu(k)≤u(k)≤u(k)a_minaa_maxk=(=0,1,…,N)105发动机转矩和转速由发动机速度特性决定;加速度在满足物理极限的前提下,将允许的2最小最大加速度定为±2m/s;初始车速和目标车速uaf已知情况下,根据状态转移方程得未来行驶过程中的双向车速可达域,即车速的约束条件,如图4。为缩短计算时间,根据经济优化车速曲线仿真结果优化可达域,缩小可达域范围,如图5。优化可达域不影响经济优化车速曲线,计算时间却节省一半以上。110))-1-1可达域/(km.h可达域/(km.haauu车速车速距离L/m距离L/m图4双向可达域图5优化可达域Fig.4BidirectionalaccessibledomainFig.5Optimizedaccessibledomain1153优化模型仿真结果为使节能驾驶辅助系统在行驶中给予驾驶员合理的经济性驾驶提示,本文运用节能驾驶辅助优化模型对起步加速工况和平路-爬坡工况进行优化计算,通过对比优化结果与运用二参数综合AT换挡规则进行控制的结果,说明优化模型的节油效果。3.1起步加速工况仿真120运用优化模型对已知目标车速的起步加速工况进行仿真,随着行驶距离增加,行驶过程的百公里油耗减小,而行驶时间却相对增加。为得到能兼顾燃油经济性和动力性需求的起步加速过程的经济优化车速曲线,选取判断经济车速最佳行驶距离的指标函数为百公里油耗与行驶时间加权相加的值:H(L)=ϕQ(L)+φT(L)(7)s125根据不同工况持续加速时间的统计结果,确定允许的最长持续加速时间为30s[10]。行驶距离的选取方法:在允许的最长持续加速时间内,使指标函数H(L)最小的行驶距离为最佳行驶距离。为使起步加速过程有更好的燃油经济性,目标车速80km/h以上的高速工况ϕ和-4-
中国科技论文在线http://www.paper.edu.cnφ分别为1和0.9,其他工况ϕ和φ分别为1和0.8,即:L=argmin[H(L)](T(L)≤30s)(8)130以10km/h为间隔,10到120km/h中取12个速度作为起步加速的目标车速,根据式(13)确定加速过程的行驶距离。对各加速过程进行仿真,以行驶距离150m,车速从0加速到50km/h的加速过程为例,得到的经济优化车速曲线及其对应的发动机转速、档位、发动机转矩如图6所示。可见,其发动机转速基本维持2000r/min,档位迅速升到3档,并维持在3档加速,发动机转矩维持在100N·m左右。)1206000e-11005000)80-14000/(km.h603000au402000/(r.min车速20发动机转速n100000050100150050100150距离L/m距离L/m135(a)车速(b)发动机转速6250520041503档位/N·m1002501Te发动机转矩00050100150050100150距离L/m距离L/m(c)档位(d)发动机转矩图60-50km/h加速过程优化行驶结果Fig.6Optimizedsimulatingresultsof0-50km/hacceleratingprocess将每组加速过程的发动机工作点显示到发动机万有特性图上,部分加速过程如图7所140示。目标车速为20km/h时,发动机的转矩在0-50N·m之间,转速在1000-2400r/min之间,发动机工作点处在燃油消耗率较高的区域,但由于20km/h目标车速加速过程的发动机输出功率较小,所以整个过程的油耗较小。目标车速为40km/h、60km/h、80km/h、100km/h的加速过程,发动机转速主要在1500-3500r/min之间,发动机工作点基本处在燃油消耗率较低区域,得到的燃油经济性较好。而目标车速为120km/h的加速过程,发动机转速在1452500-4500r/min之间,发动机工作点多数处于燃油消耗率较高的区域。因为目标车速较大,受最长持续加速时间约束和加速过程动力性需求的影响,导致汽车的燃油经济性较差,但综合考虑燃油消耗和加速需求,120km/h目标车速加速过程的控制属于较好的策略。假定汽车在行驶过程中,档位按照图3设计的综合AT换档规则图进行换挡,对各加速过程的油耗进行计算,将该结果与动态规划算法得到的百公里油耗进行对比,见表1。对于150相同的车速曲线,动态规划算法得到的控制策略相比运用AT换挡规则图得到的控制策略,百公里油耗平均降低了8.496%,这说明汽车按动态规划法优化档位换档后,能显著提高燃油经济性。155-5-
中国科技论文在线http://www.paper.edu.cn表1起步加速过程油耗对比Tab.1Fueleconomycomparisoninstartingacceleratingprocess基于AT换挡图油耗基于动态规划油耗目标车速/(km.h-1)加速距离/(m)节油率/%/[L.(100km)-1]/[L.(100km)-1]103012.44811.2049.993205015.14613.37311.709307016.95416.5442.4204010020.96818.8989.8715015020.96118.56611.4286020021.80618.76013.9687025022.67819.49414.0408032522.26419.17613.8709040023.59221.16610.28410045024.16423.4333.02411050026.11625.8960.84112055027.86027.7200.50322002201655165110011055555发动机转矩Te/N.m0Te/N.m发动机转矩01000200030004000500010002000300040005000发动机转速ne/(r.min-1)发动机转速ne/(r.min-1)(1)0-20km/h(2)0-40km/h220220165165Te/N.m1101101605555发动机转矩Te/N.m0发动机转矩01000200030004000500010002000300040005000发动机转速ne/(r.min-1)发动机转速ne/(r.min-1)(3)0-60km/h(4)0-80km/h2202201651651101105555Te/N.m发动机转矩0Te/N.m发动机转矩01000200030004000500010002000300040005000发动机转速ne/(r.min-1)发动机转速ne/(r.min-1)(5)0-100km/h(6)0-120km/h图7各加速过程发动机工作点分布Fig.7Distributionofengineworkingpointsofsomeacceleratingprocess3.2平路-爬坡工况仿真165车辆以某车速行驶,根据GPS/GIS信息预知前方道路出现坡道时,进入坡道实时经济-6-
中国科技论文在线http://www.paper.edu.cn[14]车速优化。根据我国《公路路线设计规范》纵坡长度限制,本文设计的坡道工况坡度变化如图8所示,该工况前200m为平直路段,后150m的坡道路段坡度为5%。10/%5坡度0-5050100150200250300距离L/m图8平路-爬坡工况坡度图170Fig.8Slopemapofroad-climbingcondition分别选择30km/h、50km/h、70km/h和90km/h作为汽车行驶的起始车速,坡道上的目标车速与上坡前的平直道路上起始车速相等,汽车分别在上坡前200m、175m、150m、125m、100m、75m、50m、25m和0m处进入节能驾驶辅助优化行驶,考虑程序计算效率,总行驶175距离为350m,在进入优化行驶前汽车保持匀速行驶,计算各行驶过程的百公里油耗,结果显示油耗最低均出现在上坡前100m进入优化行驶的过程。选取上坡前平直路段100m、坡道路段150m的平路-爬坡工况,以上述四种车速作为起始车速,运用节能驾驶辅助优化模型进行仿真。以起始车速50km/h的平路-爬坡工况为例,得到的经济优化车速及其对应的发动机转速、档位和发动机转矩如图9所示。各过程的发动机工作点显示到发动机万有特性图180上,如图10所示。)1206000e-11005000)80-14000/(km.h603000au402000/(r.min车速20发动机转速n100000050100150050100150距离L/m距离L/m(a)车速(b)发动机转速6250520041503档位/N·m1002501Te发动机转矩00050100150050100150距离L/m距离L/m(c)档位(d)发动机转矩图9坡度5%平路-爬坡工况加速过程优化行驶结果Fig.9Optimizedsimulatingresultsatroad-climbingconditionof5%grade-7-
中国科技论文在线http://www.paper.edu.cn220220165165Te/N.m1101105555发动机转矩0Te/N.m发动机转矩01000200030004000500010002000300040005000发动机转速ne/(r.min-1)发动机转速ne/(r.min-1)(1)30km/h(2)50km/h2202201651651101105555发动机转矩Te/N.m0发动机转矩Te/N.m01000200030004000500010002000300040005000发动机转速ne/(r.min-1)发动机转速ne/(r.min-1)185(3)70km/h(4)90km/h图10坡度5%平路-爬坡过程发动机工作点分布Fig.10Engineworkingpointsatroad-climbingconditionof5%grade从图9的车速图可以看出,汽车在预判到前方将进入坡道路段时,在平直路段上提前减190速,而在坡道路段上慢慢降档以增大发动机转矩,坡道上的车速先降低后增加至目标车速。由图10可见,发动机转速控制在2500r/min以下,从而保证发动机工作在燃油消耗率较低的区域,或使发动机工作点的需求功率较小,以此来提高汽车在整个过程中的燃油经济性。对图10中平路-爬坡工况(坡度5%)的四组起始车速在Simulink中进行实时滚动仿真,得到的优化百公里油耗见表2,对比汽车以相同起始车速在相同坡度的道路上以综合AT换195档规则换档,维持速度不变的匀速行驶,优化过程的百公里油耗平均降低12.74%。说明对于不同起始车速的平路-爬坡工况,通过DP方法优化得到的坡道实时经济优化车速,有利于提高整个行驶过程的燃油经济性。表2坡度为5%时平路-爬坡工况油耗对比200Tab.2Fueleconomycomparisonatroad-climbingconditionof5%grade基于AT换挡图油耗基于动态规划油耗-1起始车速/(km.h)节油率/%-1-1/[L.(100km)]/[L.(100km)]3013.26211.26715.0475013.29911.04516.9517013.28511.09316.5039013.35513.0262.462将图8所示道路信息中,200m至350m的坡度分别改变为3%、7%和9%,计算不同坡前距离进入优化行驶的百公里油耗。结果显示其油耗最低出现在坡前100m进入优化行驶的过程。故运用节能驾驶辅助优化模型时,当检测到前方坡道时,距离坡前100m处开始进行205坡道实时经济车速优化仿真计算,使车辆以合理的车速通过坡道,实现油耗的降低。4实时提示系统设计与仿真针对传统节能驾驶辅助系统提示滞后问题,结合预测车速与动态规划计算的经济车速,-8-
中国科技论文在线http://www.paper.edu.cn设计一种具有预见性的节能驾驶辅助实时提示方案,并对该方案中的减小加速提示进行仿真计算,分析其节油能力。2104.1实时提示系统方案设计节能驾驶辅助系统实时提示信息主要包括:减小加速的提示、档位提示、超速提示、怠速提示和坡道提示。①减小加速的提示:在畅通平直道路上经济车速出现加速工况时,对比未来5s内预测车速和经济优化车速,若在5s内的某一时刻预测车速大于优化车速且差值大于1km/h,则215提前提示驾驶员减小加速。②档位提示:汽车在手动换挡模式下稳速行驶或加速行驶时,若当前的档位低于优化车速的档位,则提醒驾驶员及时换档。③超速提示:若车速高于120km/h,则给予驾驶员减小车速的提示信息。为避免车速在120km/h上下波动造成频繁提示,车速高于120km/h并超速提示后,将超速提示的门限值降220为110km/h。④怠速提示:若汽车怠速时间超过30s,则提示驾驶员适当的减少怠速时间。⑤坡道提示:根据GPS/GIS信息获知前方道路100m处出现坡道时,进行坡道实时经济车速优化,若存在经济车速曲线中某点车速低于当前车速且差值超过1km/h,则提示驾驶员前方坡道较大,需提前降速。2254.2减小加速实时提示仿真为便于研究,选择车速图中未来实际车速曲线,代替预测模型获得的预测车速曲线。图11为代表城市畅通工况的UDDS工况,在该行驶工况上对节能驾驶辅助系统减小加速的提示功能进行仿真计算。为避免汽车行驶过程中车速的波动会引起频繁提示,令系统两次提示发出的间隔时间最短为30s。去掉反复出现的提示信息后,剩下的提示时刻分别为330s、385s、230550s、748s、942s、1085s、1150s和1319s,共8次减小加速的提示,如图12所示,1为出现减小加速的提示。100)-1751/(km.h50au25提示信号车速0003006009001200020040060080010001200时间t/s时间t/s图11UDDS工况部分车速图图12减小加速提示结果Fig.11ThespeedmapinUDDSworkingconditionFig.12Resultsofdeceleratingprompt235在出现减小加速的提示时刻点,将未来5s时域内预测车速和经济优化车速提取出来,对预测车速运用AT换挡规则的控制策略计算百公里油耗,对经济车速用动态规划程序得到的档位和转矩计算百公里油耗,两者结果的对比如表4.2所示,经济车速曲线的百公里油耗比预测车速平均减小19.17%。这说明,该提示系统减小加速的提示功能具有较好的节油潜240力。-9-
中国科技论文在线http://www.paper.edu.cn5结论本文针对节能驾驶辅助系统,运用动态规划法,基于空间域建立了以发动机最低油耗为主要目标,兼顾加速舒适性、动力性需求和避免频繁换档的节能驾驶辅助优化模型。综合考虑经济性和动力性需求,确定加速过程的合理计算距离,对加速工况和平路-爬坡工况进行245优化计算。结果显示相比采用二参数综合AT换挡规则,采用本文优化模型得到的经济优化车速曲线油耗有显著降低。最后分析节能驾驶辅助系统的实时提示功能,并提出提示信息的判断条件。[参考文献](References)250[1]李升波,徐少兵,王文军,等.汽车经济性驾驶技术及应用概述[J].汽车安全与节能学报,2014,5(2):121-131.[2]BartDegraeuwe,BartBeusen.Corrigendumonthepaper"Usingon-boarddataloggingdevicestostudythelonger-termimpactofaneco-drivingcourse"[J].TransportationResearchPartDTransports&senvironment,2013,19:48-49..255[3]AndrieuC,G.S.Pierre.Usingstatisticalmodelstocharacterizeeco-drivingstylewithanaggregatedindicator[J].2012,5(3):63-68.[4]VaggC,BraceCJ,HariD,etal.DevelopmentandFieldTrialofaDriverAssistanceSystemtoEncourageEco-DrivinginLightCommercialVehicleFleets[J].IEEETransactionsonIntelligentTransportationSystems,2013,14(2):796-805.260[5]HellströmE,AslundJ,NielsenL.Designofawell-behavedalgorithmforon-boardlook-aheadcontrol[J].IfacWorldCongress,2008,41(2):3350-3355.[6]Kamalanathsharma,R.K,Rakha,H.A.Multi-stagedynamicprogrammingalgorithmforeco-speedcontrolattrafficsignalizedintersections[C]//InternationalIEEEConferenceonIntelligentTransportationSystems.2013:2094-2099.265[7]MensingF,TriguiR,BideauxE.VehicleTrajectoryOptimizationforApplicationinEco-Driving[C].VehiclePowerandPropulsionConference(VPPC),2011IEEE,2011:1-6.[8]王建强,俞倩雯,李升波,等.基于道路坡度实时信息的经济车速优化方法[J].汽车安全与节能学报,2014,5(3):257-262.[9]李莹,王晓娟,冯挽强,等.自动变速器换挡规律研究[J].研究与开发,2012(10):77-83.270[10]谢浩.基于BP神经网络及其优化算法的汽车车速预测[D].重庆大学,2014[11]向羽.基于动态规划的两挡电动车速比优化设计[D].吉林大学,2014.[12]王园熙.汽车节能辅助驾驶优化研究[D].重庆大学,2016[13]ChrisMi.车辆能量管理:建模、控制与优化[M].北京:机械工业出版社,2013.[14]中华人民共和国交通部.公路路线设计规范(JTGD20-2006)[S].北京:人民交通出版社,2006.275-10-'
您可能关注的文档
- 我国金融发展对城乡居民财产性收入差距的影响分析.pdf
- 技工学校教师职业倦怠的成因及对策研究进展.pdf
- 抗生素暴露对小白菜幼苗生长及内生细菌的影响.pdf
- 新农保对中老年劳动力农业劳动供给的影响.pdf
- 易腐品生产运输协调决策模型.pdf
- 智慧城市建设风险分析及对策研究--以株洲市智慧城市建设项目为例.pdf
- 概率论与数理统计的SPOC教学改革探索.pdf
- 模拟移动床色谱分离4-苯基噁唑烷-2-硫酮对映体.pdf
- 氧化三甲胺在细胞超低温冻存中的应用.pdf
- 波纹钢板剪力墙简化模型分析.pdf
- 温拌沥青混凝土感应加热自愈合性能研究.pdf
- 生物质炭不同施用量对设施菜地N2O及NOx排放的减排效应研究.pdf
- 电化学类芬顿(Electro-Fe2+EDTA)体系降解染料废水研究.pdf
- 石墨烯负载铁酸锌纳米材料的制备及应用.pdf
- 硫辛酸包埋物制备工艺优化及其抗氧化性研究.pdf
- 离子交换树脂法分离纯化赖氨酸的研究.pdf
- 科技成果转化下农业专业技术人员对继续教育的认知态度、参与行为及其需求意愿分析--基于福建、安徽、山东和黑龙江四省的问卷调查.pdf
- 空冷支架结构体系抗震性能试验研究.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明