

- 907.11 KB
- 2022-04-22 11:50:31 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'《自动控制原理》习题及答案习题11.下列信号分别属于哪种信号:(1)加热炉中某处的温度;(2)每隔1分钟测量一次炉温,测量所得的数据;(3)一张照片上各点的灰度和颜色;(4)经扫描仪扫描并在笔记本电脑屏幕上显示的一张照片上各点的灰度和颜色;(5)电视屏幕上播放的电视节目;(6)DVD视盘上录制的电影信号;(7)电影院中一个扬声器线圈中的电流;(8)电影院中各处的声音;(9)为了得到较可信的心电图,多次测量并记录的曲线。2.讨论下列系统是否是定常系统,是否是线性系统,是否是确定性系统,是否是动态系统,是否是可逆系统,是否是连续系统,是否是单输入单输出系统,是否是一维信号系统:(1)汽车的速度与耗油量的关系;(2)一个在光滑平面上运动的质点的速度与所受合力的关系;(3)火箭的加速度与所受合力的关系;(4)把某河流某处每天的径流量表(输入)中的每月1日的数据另列一个表输出;(5)一个企业的投入产出关系;(6)正在钢丝上表演的杂技演员,输入是全身各肌肉的用力,他既要保持平衡,又不能离开某处;(7)因为心情(输入)舒畅,所以不但身体好了,而且学习也有了进步。3.判断下列系统是否是线性系统?是否是定常系统?其中r(t)和y(t)分别是输入和输出。(1)y(t)=br(t);(2)y(t)=tr(t);(3)y(t)=r&(t);(4)y(t)=r(2t);(5)y(t)=r(t)cosωt+5(t≥0);(6)y(t)=r(t)的虚部;(7)()2()(t≥0);(8)2;yt=rty(t)=5+r(t)+t&r&(t)(9)y(n)=r(n+1)−r(n−1);(10)&y&&(t)+3&y&(t)+6y&(t)+8y(t)=r(t);t⎧0t<6(11)y(t)=3r(t)+6r&(t)+5∫r(τ)dτ;(12)y(t)=⎨−∞⎩r(t)t≥64.讨论下列情况主要是开环机制,还是反馈机制,或是按扰动的前馈机制:(1)“自动控制理论”这门课是自动化专业的基础课,理论性又很强,所以应该更加努力学习;(2)达尔文学说认为,生物的进化是生存竞争和自然选择的结果;(3)“五一”长假耽误了很多时间,所以更应该抓紧时间学习,争取把时间补回来;(4)一分耕耘一分收获;(5)瞄准后射出一发子弹;(6)驾驶汽车;(7)向印刷线路板上安装电子元器件的机械手;1
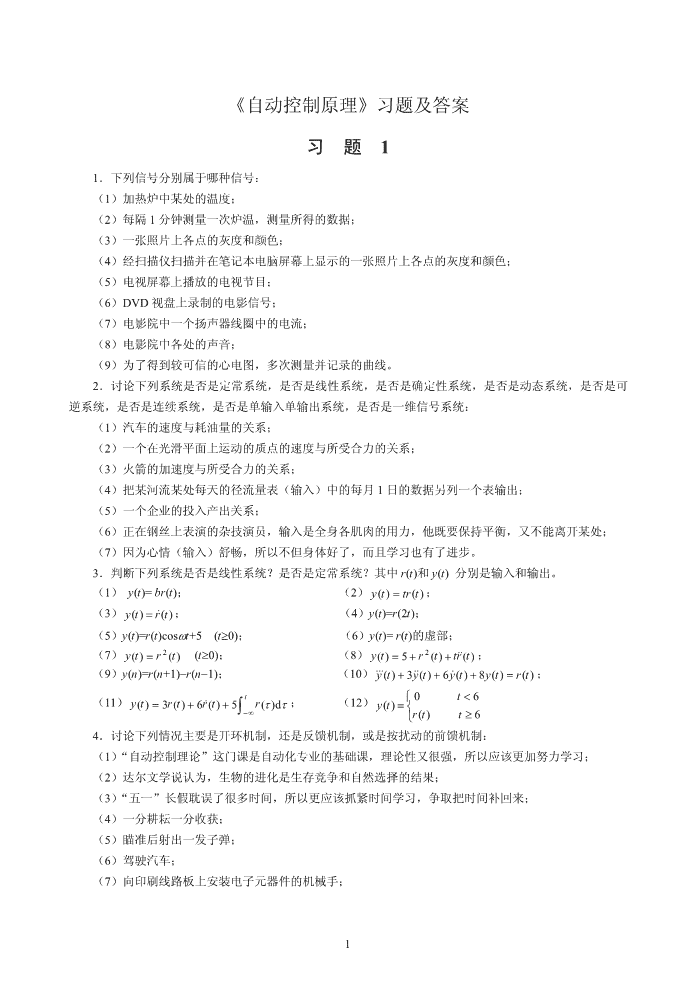
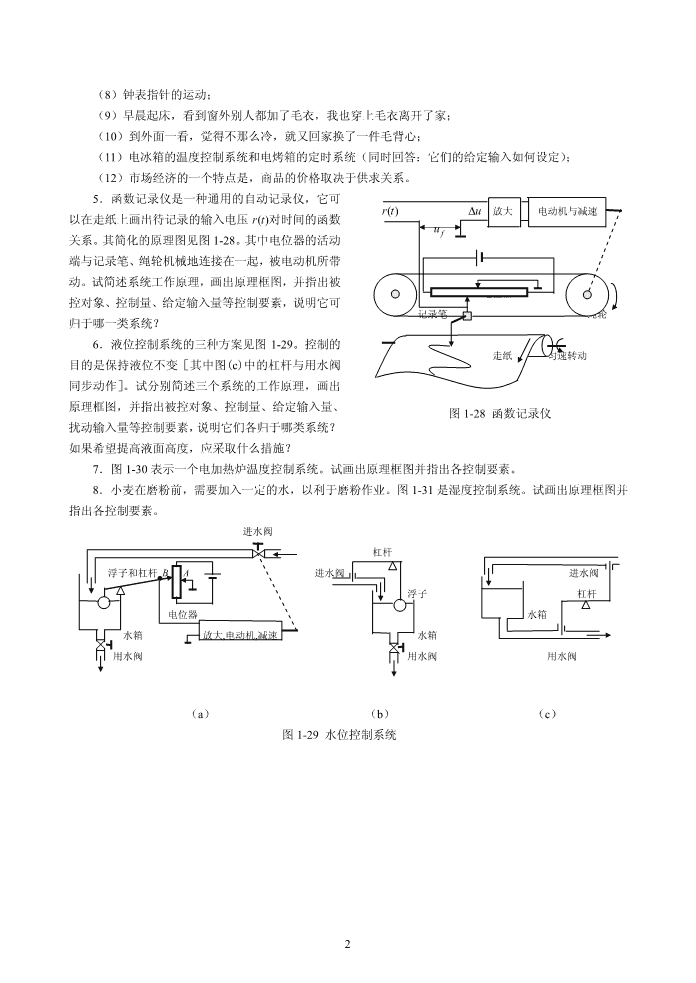
(8)钟表指针的运动;(9)早晨起床,看到窗外别人都加了毛衣,我也穿上毛衣离开了家;(10)到外面一看,觉得不那么冷,就又回家换了一件毛背心;(11)电冰箱的温度控制系统和电烤箱的定时系统(同时回答:它们的给定输入如何设定);(12)市场经济的一个特点是,商品的价格取决于供求关系。5.函数记录仪是一种通用的自动记录仪,它可r(t)∆u放大电动机与减速以在走纸上画出待记录的输入电压r(t)对时间的函数uf关系。其简化的原理图见图1-28。其中电位器的活动端与记录笔、绳轮机械地连接在一起,被电动机所带动。试简述系统工作原理,画出原理框图,并指出被电位器控对象、控制量、给定输入量等控制要素,说明它可记录笔绳轮归于哪一类系统?6.液位控制系统的三种方案见图1-29。控制的走纸匀速转动目的是保持液位不变[其中图(c)中的杠杆与用水阀同步动作]。试分别简述三个系统的工作原理,画出原理框图,并指出被控对象、控制量、给定输入量、图1-28函数记录仪扰动输入量等控制要素,说明它们各归于哪类系统?如果希望提高液面高度,应采取什么措施?7.图1-30表示一个电加热炉温度控制系统。试画出原理框图并指出各控制要素。8.小麦在磨粉前,需要加入一定的水,以利于磨粉作业。图1-31是湿度控制系统。试画出原理框图并指出各控制要素。进水阀杠杆浮子和杠杆BA进水阀进水阀浮子杠杆电位器水箱水箱放大,电动机,减速水箱用水阀用水阀用水阀(a)(b)(c)图1-29水位控制系统2
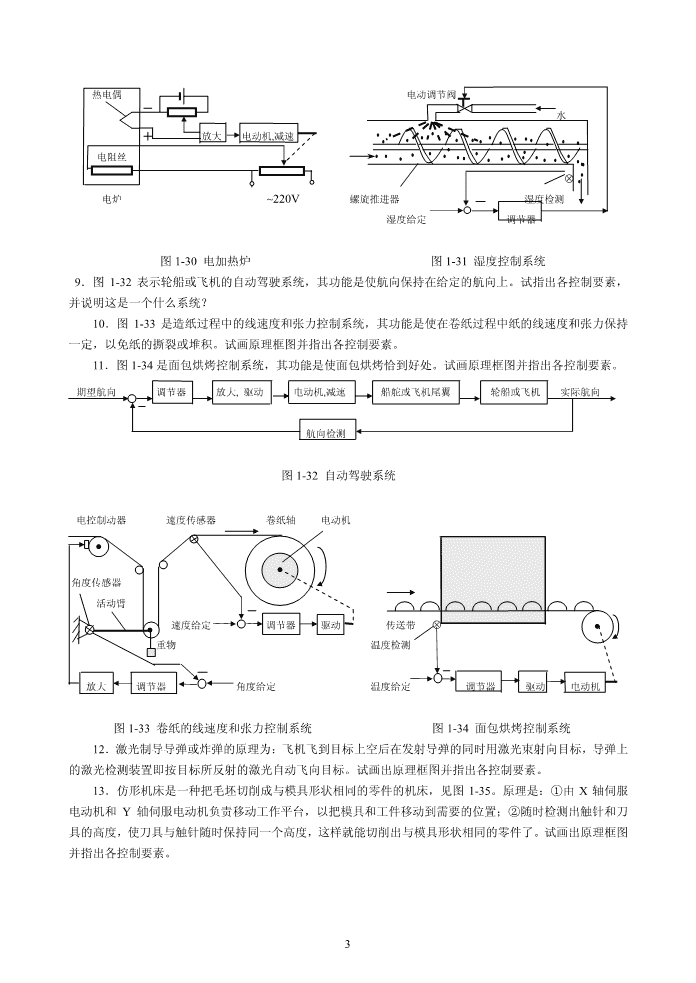
热电偶电动调节阀水放大电动机,减速电阻丝⊗电炉~220V螺旋推进器湿度检测湿度给定调节器图1-30电加热炉图1-31湿度控制系统9.图1-32表示轮船或飞机的自动驾驶系统,其功能是使航向保持在给定的航向上。试指出各控制要素,并说明这是一个什么系统?10.图1-33是造纸过程中的线速度和张力控制系统,其功能是使在卷纸过程中纸的线速度和张力保持一定,以免纸的撕裂或堆积。试画原理框图并指出各控制要素。11.图1-34是面包烘烤控制系统,其功能是使面包烘烤恰到好处。试画原理框图并指出各控制要素。期望航向调节器放大,驱动电动机,减速船舵或飞机尾翼轮船或飞机实际航向航向检测图1-32自动驾驶系统电控制动器速度传感器卷纸轴电动机烘烤箱角度传感器活动臂速度给定调节器驱动传送带⊗重物温度检测放大调节器角度给定温度给定调节器驱动电动机图1-33卷纸的线速度和张力控制系统图1-34面包烘烤控制系统12.激光制导导弹或炸弹的原理为:飞机飞到目标上空后在发射导弹的同时用激光束射向目标,导弹上的激光检测装置即按目标所反射的激光自动飞向目标。试画出原理框图并指出各控制要素。13.仿形机床是一种把毛坯切削成与模具形状相同的零件的机床,见图1-35。原理是:①由X轴伺服电动机和Y轴伺服电动机负责移动工作平台,以把模具和工件移动到需要的位置;②随时检测出触针和刀具的高度,使刀具与触针随时保持同一个高度,这样就能切削出与模具形状相同的零件了。试画出原理框图并指出各控制要素。3
Z轴位置传感器Z轴伺服电动机及驱动⊗刀具位置传感器⊗控制器只上下移动的触针只上下移动和旋转的刀具模具被切削的零件能前后左右移动的工作平台X轴伺服电动机及驱动立柱Y轴伺服电动机及驱动机床底座图1-35仿形机床14.在液体管道中,流过阀门的流量与阀门前后压差的平方根成正比:q=kp如果流量与压差分别都在某一个值附近微小波动,试写出线性化的流量-压差关系。习题21.求下列信号的频谱:⎧⎪1t≤τ/2(1)Gτ(t)=⎨;⎪⎩0t>τ/2⎧e−(t−1)0≤t≤1(2)f(t)=⎨;⎩0其他(3)f(t)=Gτ(t)∗δ(t−t0),其中Gτ(t)见本题(1)。2.若已知F[f(t)]=F(ω),试利用傅氏变换的性质求下列信号的频谱:(1)tf(2t);(2)(t−2)f(t);df(3)(t−2)f(−2t);(4)t;dt(5)f(1−t);(6)(1−t)f(1−t)3.求下列信号一个周期内的平均功率,并画出它们的功率谱密度:(1)Acos(2000πt)+Bsin(200πt);(2)Acos(200πt)cos(2000πt);(3)Asin(200πt)cos(2000πt);(4)sin2(200)cos(2000)Aπtπt4.求下列信号的自相关函数:(1)()=e−at⋅1()(>0);(2)fttaf(t)=Ecos(ω0t)⋅1(t)5.试小结傅里叶分析在实际信号处理中的应用和局限性。6.函数f(t)的单边拉氏变换为:(1)F(s)=1e−τs;(2)F(s)=1s+1(s+1)(s−1)指出其收敛域。f(t)是否存在傅氏变换?如有,请求出来。4
习题31.判断下列系统是否是线性系统?是否是定常系统?其中r(t)和y(t)分别是输入和输出,y(0)是输入加入前一瞬间的初始状态。(1)y(t)=ay(0)+br(t)(t≥0);(2)y(t)=ay(0)+btr(t)(t≥0);(3)()2(0)()(t≥0);(4)y(t)=y(0)+r(t)+1。yt=ay+brt2.微分方程为Ty&(t)+y(t)=r(t),用拉氏变换法求脉冲响应函数g(t),并用卷积求输入r(t)=1(t)−1(t−τ)时的零状态响应。3.图3-58是弹簧−质量−阻尼系统,其中阻尼器的阻尼力与速度成正比(比例系数为f),试列写位移y与外力r之间的微分方程与传递函数。4.图3-59是应用于飞机、火箭、高速列车上的加速度计的示意图。它的主要部件是一个被束缚在弹簧上的质量为m的惯性物体,弹簧固定在被测的运动体上。要求计算运动体的加速度x&,但直接能测量的却1只有弹簧的变形y(t)=x2(t)−x1(t)。设弹簧的弹性系数为k,物体m所受的粘性摩擦系数为f,试求以x1(t)为输入、y(t)为输出的微分方程和传递函数。5.用复阻抗法求图3-60和图3-61系统的传递函数,并把它们转化为微分方程。yxx21弹性系数k外力r阻尼系数f阻尼系数fm弹性系数km图3-58弹簧-质量-阻尼系统图3-59加速度计R100µF100kΩ20kΩC20kΩr10µFyr−Ky图3-60无源网络图3-61有源网络6.系统在单位阶跃输入r(t)=1(t)时的零状态响应为−2t−t,(1)用两种方法求传递函数与r(t)g(t)yf(t)=1−e+e脉冲响应函数;(2)由求出的脉冲响应函数用卷积法11反过来求单位阶跃输入时的零状态响应,看是否与原已知相一致。7.系统的输入和脉冲响应函数分别见图3-62(a)−1/201t02t和(b),试用卷积的图解法求零状态响应。(a)(b)8.用结构图等效变换的方法求图3-63中Y(s)与图3-62卷积的图解法R(s)之间的传递函数。9.用结构图等效变换的方法求图3-64中Y(s)与R(s)之间的传递函数。10.用结构图等效变换的方法分别求图3-65中Y(s)与R(s)、Y(s)与N(s)之间的传递函数。11.在图3-66中,已知G(s)和H(s)两框对应的微分方程分别为5
6y&+10y=20e,20b&+5b=10y求传递函数Y(s)/R(s)和E(s)/R(s)。RG1YH2+G2RG1−G2G3YG3H1H3(a)(b)图3-63化简结构图的题8G3NG1NRG1+G2−YR+G2+G4YH1G3图3-64化简结构图的题9图3-65化简结构图的题10G1R10EG(s)YREYBH(s)G2图3-66传递函数与微分方程的关系图3-67用梅逊公式求传递函数12.画出图3-63的信号流图并用梅逊公式求Y(s)与R(s)之间的传递函数。13.有时,不可能或很难用化简结构图的方法求传递函数,这时最好用梅逊公式。试求图3-67中的传递函数Y(s)/R(s)和E(s)/R(s)。14.图3-68是控制理论实验中的一个模拟电路,画其结构图并求输入输出间的传递函数。C1C2R215.图3-69是某个位置随R1动系统。已知电位器的最大工作角为330°,测速发电机TG的传递函数为K4s,直流拖动电动机RR0−KR0−KR0−KYSM的电枢电阻假设为零。求:(1)电位器的传递函数K,两R00个放大器的传递函数K和K;12(2)利用3.6节的例7画出结图3-68实验室的模拟电路构图。6
16.图3-70是一个加热系统。系统的输入是电加热装置单位时间内供给的热量r(t),输出是出口温度y(t)。其他已知条件见图3-70。画出其结构图并求输入输出间的传递函数。17.图3-71为理想火箭推进器模型。参数见图3-71,其中的粘性摩擦力与速度成正比。试画系统的结构图并求某时刻t时推进力r(t)与荷载舱y(t)之间的传递函数。K,θ30k10k20k0r−K(功放)SMTG3+15V−15V10k−K10k−K10kK0,θy+15V−15V图3-69位置随动系统荷载舱速度y(t)荷载舱质量m容器壁绝热检测热料液温度y(t)粘性摩擦系数f弹性连接系数k加热器:延迟时间τ火箭质量M(t)比热容=c粘性摩擦系数F冷料液:质量=M温度=θ流量=q∼220V单位时间内供推进力r(t)给的热量=r(t)图3-70加热系统图3-71理想火箭的模型18.能否判断下列系统的BIBO或零输入稳定性?如果能,请判断:(1)零输入响应为(2)零状态响应为y(t)=Acosωt;t;yf(t)=Ae(3)阶跃输入时的响应为(4)实际脉冲输入时的响应为()=+e−tsin(ω+ϕ);t;ytABty(t)=A+B⋅1(t−τ)+Ce(5)脉冲响应函数为(6)响应的稳态分量为gtA−2tB;y(t)=At;()=e+(7)响应的稳态分量为(8)响应的暂态分量为y(t)=Bsin(ωt+ϕ);()e−2te−tsin();yt=A+Bωt+ϕ(9)微分方程为(10)特征方程为&y&+2y&+3y=r;42230;s+s+s+=7
(11)特征方程为(12)特征方程为2(1)0;(s−1)(s+1)(s+2)=0ss+=19.系统如图3-72,其中进水流量r(t)是输入,水位h(t)r(t)是输出,设出水流量与水位成比例即q(t)=kh(t)。试从微分方程和物理概念两方面判断:系统是否是零输入稳定的?如果把阀h(t)水槽A换成出水量固定的泵呢?A流量q(t)20.判断下列系统是否稳定:(1)习题1图1-29(c)所示水位控制系统;(2)炉温控制系统的温度振荡且幅度越来越大;图3-72水槽的零输入稳定性(3)炉温控制系统的温度振荡但幅度越来越小;(4)行进中的骑自行车者,骑车者的控制为输入,车体姿态为输出;(5)用功率不变的电炉对房间供暖,室外气温为系统惟一的输入,温度为输出;(6)存在银行的存款,输入为存、取款;(7)由于盗猎者疯狂的捕猎,藏羚羊的数量越来越少;(8)由于国家采取了保护措施,藏羚羊的数量又逐渐得到恢复。21.(1)某稳定的线性定常系统的零状态响应见图3-73(a)中曲线A,当输入不变,该系统在非零初始状态下的响应是图中的哪条曲线?(2)对于图3-73(b),情况又如何?y(t)y(t)abAAcabcddOtOt(a)(b)图3-73稳定系统在同一输入下的响应22.分别用赫尔维茨判据与劳斯判据判断具有下面特征方程系统的稳定性:341035220s+s+s+s+=23.判断图3-74系统的稳定性。1s+110RYRY2(2s+1)(3s+1)ss(s+1)s−12s(a)(b)图3-74反馈控制系统的稳定性24.对于实际系统,仅仅稳定是不够的,还要求极点离虚轴有一定的距离。图3-75为高速列车停车位置控制系统。如果要求全部闭环极点都位于复平面上s=−1线以左,设法用劳斯判据求放大器增益K的临界8
值。25.当输入是常数A时,下列系统有无稳态输出值?如有,请求出:11(1)G(s)=;(2)G(s)=s+2s−20.001至停车点距离RK刹车系统:1000高速列车:实际位置Y2s加速度计:0.12s测速计:0.1s位置检测:1图3-75高速列车停车位置控制系统习题41.试讨论下列系统是动态性能不好(包括是否稳定),还是稳态精度不够,还是两者都不好:(1)温度控制系统的温度经常偏离给定值,但偏离后在一段时间内又基本不变化[图4-78(a)]。(2)温度控制系统的温度经常波动,但停止波动后能基本实现给定值[图4-78(b)]。温度给定温度给定OtOt(a)(b)图4-78温度控制系统的输出(3)角度随动系统,当输入先快速移动一个角度,然后静止不动,这时输出能基本重复输入的动作;但输入匀速转动时,输出的转速慢于输入,致使动作不能同步。(4)角度随动系统能较好地指向静止目标,但对于运动目标跟踪不良。(5)第1章图1-18系统,当料液流量增加某一定值时,温度需要较长时间才能回升,而且较多地低于原温度。2.某系统的单位阶跃响应如表4-5,它能否近似成一阶系统?如果能,求传递函数。表4-5一阶系统单位阶跃响应的数据时刻/s01234567…∞单位阶跃响应y(t)01.612.793.724.384.815.105.36…6.003.把图1-19系统等效为单位反馈系统,根据图4-10,其结构图设为图4-79,其中给定输入为100°C。(1)试求当料液温度突然比正常温度降低10°C时的响应函数,并画出曲线;(2)最终实际温度为多少?9
冷料液温度变化θ1热交换器放大器电动阀51给定温度θr102.54+温度θy5s+1图4-79温度控制系统的结构图4.图4-80是简化的飞行控制系统结构图。(1)试选择参数K1和K2,使系统的自然振荡频率ωn=6,并刚好处于无超调状态;(2)求这时阶跃响应的调节时间。5.二阶系统的阻尼系数ζ=0.707时称为具有最佳阻尼。25KR(s)KY(s)R(s)Y(s)1s(s+0.8)s(0.1s+1)Ks2图4-80临界阻尼的二阶系统图4-81欠阻尼二阶系统(1)求图4-81系统具有最佳阻尼系数时的K值;(2)当具有最佳阻尼系数时,求输入为r(t)=2×1(t)时的超调量和调节时间。6.二阶无零点系统的单位阶跃响应如图4-82,试确定其传递函数。7.如果要求二阶无零点系统在保持超调量不变的情况下具有较低的振荡频率,应使闭环传递函数的极点位于图4-83中的A、B还是C、D?哪一种情况的快速性较好?y(t)稳态值Im2.4A2.12.0COReDB06t/s图4-82性能指标的含义图4-83振荡频率8.是否过阻尼二阶系统的响应速度一定比欠阻尼系统的慢?9.近似地求下面系统的阶跃响应超调量和调节时间:1301(s+4.9)G(s)=2(s+5s+25)(s+5.1)(s+50)110.系统传递函数为G(s)=,试定性比较下列系统的阶跃响应性能与它的差异:2s+s+111(1);(2);22s+1.2s+14s+4s+110
10.5s+1(3);(4)22(s+s+1)(0.5s+1)s+s+111.用终值定理法重新求第3题的稳态温度。12.根据图3-52,水位控制系统的结构设为图4-84。设给定电位为1V(相当于给定水位为2.5m),如果用水流量比正常时增大了53,求(cm)/s用水流量变化N(s)水位的稳态值。这是一个无差系统吗?注:图中的各传递函数涉及的单位是:给定电位放大,校正电动阀0.1水箱水位1010给定量为V,输出量为m,用水流量为R(s)2开度−Y(s)3s+1s(cm)/s,即不必再进行单位换算。电位器0.413.单位反馈系统的开环传递函数为KGk(s)=2(s+2)(s+5)图4-84液位控制系统的稳态误差(1)用大半张练习本纸准确绘制闭环根轨迹图;(2)由绘制的根轨迹图作图求阶跃响应超调量为17%时的K值,并求这个K值时的阶跃响应调节时间和稳态误差;(3)由图分析,如果只调整开环增益,则系统动态性能的改善与稳态性能的改善有无矛盾?14.系统如图4-85(a)。(1)画出根轨迹图;(2)由图分析,如果只调整开环增益,系统动态性能的改善与稳态性能的改善有无矛盾?能否提高响应速度?(3)为了改善性能,采取了图4-85(b)所示的校正措施,试画校正后系统的根轨迹图并分析校正的作用。放大被控对象校正装置被控对象1k(s+4)1R(s)kY(s)R(s)Y(s)s(s+2)s+10s(s+2)(a)(b)图4-85用根轨迹法分析校正的作用∗2K(0.5s+s+1)15.开环传递函数为Gk(s)=,试画闭环根轨迹。4(s+1)16.测速反馈系统如图4-86。(1)概略地画出无测速反馈时的根轨迹;(2)画闭环极点随T而变化的轨迹并分析测速反馈的作用;(3)如果要求阶跃响应超调量σ≤5%,调节时间不超过3s,且稳态误差尽可能小,试求T;(4)求这时的稳态误差。17.系统见图4-87,要求阶跃响应超调量σ≤20%,调节时间ts≤0.3s。试用根轨迹法设计串联迟后-超前校正装置。驱动被控对象角位移串联校正被控对象2KR(s)5Y(s)R(s)G(s)Y(s)cs(s+1)(s+5)s(0.1s+1)(0.01s+1)测速反馈Ts图4-86测速反馈系统图4-87根轨迹法校正18.试讨论:对于第1题中有问题的各系统,应该如何校正?如果是PID调节器,应如何调整其参数?11
19.第12题中的用水干扰是系统的主要扰动量,试设计一个按用水增量n(t)前馈补偿的复合控制系统,画出其结构图。设所需的流量计的传递函数为0.01V[(cm)3s−1]。20.精馏塔塔底温度控制系统见图4-88。其中热蒸气在加热器中对塔底料液不断进行加热以保持温度恒定。调节器2是为了克服蒸汽流量变化的干扰而设的。(1)试画出系统的原理框图;(2)图中进料是另一个主要的扰动量,如果进料要从它引入前馈补偿,前馈信号应从调节器1加温度给定入还是从调节器2加入?画出有前馈补偿的复合控制系统方框图。调节器1精馏塔�温度检测流量检测调节器2加热器�加热蒸气图4-88精馏塔塔底温度控制系统习题51.系统的传递函数为G(s)=20(s+1)e−τss(s+2)(s+3)写出其幅频特性和相频特性的表达式。它的相频特性有什么特点?2.对于习题3图3-60所示的无源网络,(1)分别求频率特性、幅频特性和相频特性的表达式;(2)它的相频特性与角频率ω是线性关系吗?(3)描点画其幅频特性和相频特性曲线;(4)设输入电压为r(t)=(2sin3t+20sin300t)1(t)V(其中时间的单位为s),试尽可能准确地画出输出电压的波形(要注明频率的近似值)。3.对图5-45系统,求输入为r(t)=3sin2t时的稳态误差。4.图5-46中,G(ω)是理想低通滤波器:⎧⎪e−jωτω≤1rad/sG(ω)=⎨⎪⎩0ω>1rad/s2sin(t/2)(1)求零初始状态下的单位阶跃响应;(2)求输入为r(t)=下的零状态响应。tR(s)E1Y(s)s+1图5-45反馈系统12
5.求系统的稳态响应,其传递函数和输入分别为r(t)−TsG(ω)y(t)1eG(s)=,s+1r(t)=sint+sin(3t)6.在“电路”课中已知,LC谐振电路具有选图5-46由频率特性求响应择频率的作用,当输入的正弦信号频率与LC电路的谐振频率一致时,将产生强烈的输出响应;而当输入信号的频率与谐振频率稍微偏离时,输出响应几乎为零。利用这一原理可以从非正弦周期信号中选择所需的正弦频率成分。设图5-47(a)就是这样的理想LC谐振电1路,谐振频率为f0==100kHz,R=100kΩ。输入电流r(t)见图5-47(b)。当输入电流的参数为图5-472πLC(b)所示的3种情况时,试概略地画出输出电压y(t)的波形(并注明幅度值)。r(t)/(mA)1①τ=5µs,T=10µsr(t)LCRy(t)②τ=10µs,T=20µs0τTt/s③τ=15µs,T=30µs−1(a)(b)图5-47谐振电路的选频作用7.分别求下列理想高通滤波器和理想带通滤波器的脉冲响应函数:⎧⎪Ae−jωτω≥ω⎧⎪Ae−jωτω≤ω<ω(1)G(ω)=⎨0c;(2)G(ω)=⎨012⎪⎩0ω<ωc⎪⎩0ω<ω1,ω≥ω28.设计通带截止频率为2kHz的4阶巴特沃斯低通滤波器。9.信号由有用信号和噪声相加而⎥G(jω)⎢成,它们的幅频谱见图5-48(其中粗线为有用信号的频谱),试设计一个3阶巴特沃斯滤波器来滤除噪声。0310f/(kHz)10.(1)用半张练习本纸画出半对数坐标;(2)描点画出题2的对数图5-48滤波器设计幅频特性和对数相频特性曲线。11.(1)画出下列开环系统的对数幅频特性渐进线,并修正成较准确的曲线;(2)不描点,但尽可能准确地画出对数相频特性曲线:40(s+0.5)2.5(s+2)(1)Gk(s)=;(2)Gk(s)=;22(s+0.2)(s+s+1)s(s+40)(s+21s+20)400(s+1)2s−1(3)Gk(s)=;(4)Gk(s)=s2(s2+20+100)s+112.某系统的波德图见图5-49,试大致画出当输入为2sint+sin10t时的稳态响应波形。13.某系统的波德图见图5-50,(1)它是最小相位的吗?(2)设此系统串联有延迟环节,试判断延迟13
时间τ的大致范围。14.实际开环系统的波德图见图5-51,近似地求L(ω)开环传递函数。−20−1L(ω)/dB0dB110−40ω/(rad⋅s)20ϕ(ω)−1ω/(rad⋅−1)0.1110ω/(rad⋅s)s−40−90°−180°图5-49波德图的概念图5-50非最小相位系统的波德图L(ω)/dB40200−20−40−60−80−100−1200.1110100−1ω/(rad⋅s)ϕ(ω)−45°−90°−135°−180°−225°−270°图5-51实际开环系统的波德图15.本题讨论在磁带录放技术中广为应用的杜比(Dolby)降噪系统。磁带放音时,由于磁带与放音磁头之间的摩擦,结果在放出的声音中叠加了一种高频的“咝咝”噪声。杜比降噪系统的原理是,在录音时用一个高频增强滤波器把原信号的高频部分放大,而在放音时再衰减这同一频率范围的信号。对于原信号而言,这种录音时的放大和放音时的衰减正好抵消;而对于高频的放音噪声而言,由于放音后被衰减,所以听起来被大大削弱了。设信号s(t)的对数幅频谱和放音噪声n(t)的对数幅频谱如图14
5-52(a)所示,录音时的高频增强滤波器G1(s)、放音时的高频衰减滤波器G2(s)和信号处理过程如图5-52(b)所示。如果希望信噪比为40dB(即信号幅频谱与噪声幅频谱相差40dB),试画出滤波器G1(s)和G2(s)的对数幅频特性曲线。16.画出典型环节的幅相频率特性曲线。17.概略地画出第11题的幅相频率特性曲线。20log⎪S(ω)⎪/(dB),0信号20log⎪N(ω)⎪/(dB)−10−20噪声−30−40501001k5k10k20kf/(Hz)(a)磁带录音磁带放音高频放音噪声n(t)原始信号s(t)高频增强G1(s)磁带上的信号+高频衰减G2(s)最终听见的信号y(t)(b)图5-52杜比降噪系统习题61.已知闭环系统为无零点二阶系统,幅频特性如图6-41。求阶跃响应的超调量与调节时间。2.第4章曾谈到,附加零点使阻尼变小,而附加极点使⎟G(jω)⎢阻尼增加。试从频率特性的角度解释这一规律。1.43.图6-42画出了三个开环系统的幅相频率特性曲线。试1.0用奈奎斯特稳定判据判断闭环系统的稳定性。−0.8sKe03ω/(rad⋅s−1)4.单位反馈系统的开环传递函数为Gk(s)=,试s+1用奈奎斯特稳定判据确定使闭环系统稳定的K值范围。图6-41二阶系统的闭环幅频特性5.判断习题5第11题的闭环系统的稳定性。15
ImImIm−1−10Re0Re−10ReG(s)=K(T1s+1)(T2s+1)G(s)=K(T5s+1)(T6s+1)G(s)=Kk3ks(Ts+1)(Ts+1)(Ts+1)(Ts+1)ks(Ts−1)s1234图6-42奈奎斯特稳定判据16
6.开环传递函数分别为−s512(s+1)100e(1)Gk(s)=;(2)Gk(s)=;(3)Gk(s)=s(0.5s+1)(0.1s+1)s(0.5s+1)(0.1s+1)2s(s+10s+100)分别画出开环系统的波德图,并计算开环截止频率ω和相位裕量γ。c7.对于习题5的第14题,(1)从图5-51上近似地求相位裕量γ和增益裕量的分贝值;(2)求速度误差;(3)如果把开环增益增大到原来的10倍,相位裕量γ和增益裕量的分贝值将变为多少?速度误差呢?8.最小相位的开环系统见图6-43,判断闭环系统的稳定性。9.对于第5题的第(1)小题,求阶跃响应的超调量和调节时间的近似值。10.几个最小相位系统的开环波特图见图6-44,试比较它们闭环性能的差异。L(ω)L(ω)−400dBω/(rad⋅s−1)ab−20ϕ(ω)0dBω/(rad⋅s−1)ω/(rad⋅s−1)−20−180°−40cd图6-43奈奎斯特稳定判据图6-44最小相位系统的波德图11.最小相位系统Gk(s)的开环波德图见图6-45,如果希望校正后的波德图如图中Gk′(s),试画出串联校正装置的波德图。L(ω)12.原系统的开环传递函数为G′(s)−2010kGk(s)=s(s+1)−20−40G(s)(1)设计串联超前校正(包括开环增益的调k0dB−20ω/(rad⋅s−1)整),使动态性能指标为ω=10rad/s,γ=40°,并计c算这时的速度误差系数K。−40−40v(2)设计串联迟后校正(包括开环增益的调−60整),使性能指标为Kv=20,γ=40°,并计算这时的−60开环截止频率ω。c图6-45串联校正(3)设计串联迟后-超前校正,使性能指标为K=200,ω=10rad/s,γ=40°。vc13.对于习题4第1题中的各系统,试讨论如何用频率法校正。14.某系统的开环截止频率ωc≈100rad/s,则在下列串联校正装置传递函数中,能在基本保持原系统稳定性及频带宽的前提下,通过适当的增益调整,使稳态误差减至最小的是哪一种:5s+12s+10.0005s+10.5s+1θK1K2θ,,,r0.5s+110s+10.05s+15s+1Tfs+1s(Tms+1)15.角度随动系统如图6-46,其中K=2D(s)2000°/Vs,Tf=0.008s,Tm=1s,要求的性能指标为:Kv≥500/s,ts≤0.4s,σ≤30%。试设计反馈校正传递函数D(s),并确定K。1图6-46反馈校正16.试判断下列说法是否全面、正确:(1)串17
联超前校正主要用于改善动态性能;(2)串联迟后校正主要用于改善稳态性能;(3)串联迟后-超前校正用于同时改善动态和稳态性能;(4)反馈校正的主要作用是全面改善动态和稳态性能。习题71.数字信号和离散信号是不同的两个概念。试判断下列信号是否是数字信号,是否是离散信号:(1)组成手提式电脑显示屏的许多小液晶块中的一个所受的电压;(2)上述显示屏中某一时刻某行的灰度(信号的自变量为几何坐标而不是时间);(3)数字式洗印照片时,需要用扫描仪把底片存入计算机的存贮器,该存贮器中的底片信号;(4)上述装置输出照片时,是用强度随底片变化的激光束扫描相纸并使其感光,该激光束的强度。2.把图7-43所示周期序列展开为傅氏级数,并由结果求原序列。3.计算下列序列的频谱:∞(1)x(n)=2n⋅1(−n);(2)nx(n)=∑(1/4)δ(n−3k)k=0x(n)X(ω)11……−5−1015n−3000300f/Hz图7-43周期序列图7-44连续信号的频谱4.连续信号x(t)的频谱见图7-44,分别以T=1/400s和T=1/800s为采样周期对x(t)进行采样而得到x(n),求两种情况下x(n)的频谱,并指出其主值区间。5.在第2章讲到把信号调制后再传输是为了在一个信道中同时传输多路信号,这称为“多路复用”。这种多路信号按频谱范围的不同使用同一信道的技术称为“频分复用”。在数字传输出现以后,多路复用可按图7-45所示的思路进行。即把一个采样周期分成若干个时间段,每一段传输一路信号。虽然微观上任何时刻都只传输一路信号,但宏观上却达到了同时传输多路信号的目的。这种多路复用技术称为“时分复用”。设一根光导纤维中同时传输24路数字电话,话音的频谱范围为50∼3400Hz,求光导纤维应有的频带宽。x(t)采样周期T…Ot第1路第2路第3路…第24路图7-45时分复用6.将三角波采样得到序列x(n)=0⋅δ(n)+δ(n−1)+2δ(n−2)+δ(n−3),求x(n)的连续频谱和4点DFT。7.分别求方波脉冲序列x(n)=δ(n)+δ(n−1)+δ(n−2)的3点和8点DFT,并与其连续频谱比较。8.有限长序列为x(n)={3,2,3,4},n=0,1,2,3,(1)试利用DFT的矩阵形式求其DFT;(2)再由所得结果求IDFT,看是否和原序列相等。k9.有一作序列频谱分析用的数字信号处理器,输入序列的长度必须是2的整数次幂2,若采样周期T=10ms,要求频率分辨率f1≤10Hz,求:(1)应输入的序列长度;(2)所能处理信号的最高频率;(3)试用该处理器计算−10t的频谱X(k),并将其中的k换算成ω。x(t)=e⋅1(t)18
10.试分别利用直接法和DFT求下面2个序列的线性卷积和线性相关函数:x(n)=δ(n)+2δ(n−1),y(n)=δ(n)+δ(n−1)11.系统的脉冲响应函数为g(n)={1,0.5},输入序列为…,r(−1)=3,r(0)=2,r(1)=1,试用直接卷积法和DFT法分别求n=1时刻的输出y(1)。12.求以下各序列的双边z变换,并标明收敛域,绘出零极点分布:(1)x(n)(1/2)n1(n)(n);(2)n=⋅+δx(n)=(1/3)⋅1(−n)n(3)x(n)=(1/2);(4)x(n)=0.1δ(n)+0.2δ(n−1)+0.3δ(n−2)13.用定义法求下列双边z变换式的z反变换:−1−11+2z1+2z(1)X(z)=,z>1;(2)X(z)=,z<1−1−2−1−21−2z+z1−2z+z14.分别用定义法和部分分式法求下列单边z变换式的z反变换:−110z−3+z(1)X(z)=;(2)X(z)=(z−1)(z−2)−1−21−2z+z21010z(3)X(z)=;(4)X(z)=(z−1)(z−2)(z−1)(z+2)15.求下列双边z变换式所有可能的因果和非因果序列的原函数:−15z1(1)X(z)=;(2)X(z)=−1−1−1−2(1−2z)(3−z)1+1.5z−0.5z16.由z变换求下列序列的频谱(采样周期为T):(1)δ(n−m);(2)e−αn1(n)⋅17.第12题的各序列是否存在频谱?如有,请求出。习题8s+101.求能在计算机上实现迟后校正传递函数的差分方程。5(s+2)2.求积分环节1/s的差分方程。3.某人在银行有一年一存取的定期存款,设第n年的原存款额为y(n),新存入额为x(n),年息为a,且利息不单独支付。试列写该过程的差分方程。设y(0)=500,a=0.02,x(0)=0,x(1)=100,x(2)=−200,求y(3)。4.分别用迭代法、经典法和z变换法(其中的z反变换又分别用定义法和部分分式法)求因果系统差分方程初值问题前4步的解:⎧y(n)−0.5y(n−1)+0.06y(n−2)=r(n−2),r(n)=1(n)(1)⎨⎩y(−1)=y(−2)=0⎧y(n)−0.1y(n−1)=0.53r(n)+0.1r(n−1),r(n)=1(n)(2)⎨⎩y(−1)=0⎧y(n)−y(n−2)=r(n−2),r(n)=0(3)⎨⎩y(−1)=0,y(−2)=15.初值问题为⎧y(n)=r(n)+2r(n−1),r(0)=1,r(1)=2,r(2)=3,r(3)=4⎨⎩y(0)=0求系统的脉冲响应函数和z传递函数,并用卷积求前4步的近似解。它与迭代解法有区别吗?19
6.求第4题(1)、(2)系统的z传递函数。7.已知零初始状态下离散系统的单位阶跃响应为−2nT(T为采样周期),求系统的z传递函y(n)=1−e数、脉冲响应函数和差分方程。8.移动平均去噪系统为y(n)=0.2r(n−1)+0.6r(n)+0.2r(n+1),求z传递函数和脉冲响应函数。9.求图8-50中各系统的z传递函数(采样周期T=1s)。−1−1r(n)zzy(n)数字控制器广义对象−11zr(n)1.2零阶保持器y(t)s(10s+1)1计算机模数转换(T=1s)(a)(b)图8-50数值计算系统和计算机控制系统10.判断下列因果离散系统的稳定性:n1(1)脉冲响应函数为g(n)=δ(n)+1.2;(2)z传递函数为G(z)=;(z−0.2)(z+0.5)(z+0.1)(3)特征方程为0.5−21.5−110;(4)差分方程为y(n+2)−y(n+1)+0.26y(n)=r(n+1)+2r(n)z+z+=11.判断第3题存款系统的稳定性。12.判断图8-50系统的稳定性,如稳定,求单位阶跃输入时的稳态输出。113.非因果系统的z传递函数为G(z)=,0.4<⎪z⎪<0.6,试求其脉冲响应函数,并判断(z+0.6)(z−0.4)稳定性。14.判断第8题移动平均去噪系统的稳定性。15.求图8-50(b)系统的单位阶跃响应的前若干个值,并由此近似地求阶跃响应超调量。16.图8-50(b)系统的原开环系统是1型的,用模拟比例调节器时位置误差为零。问:用计算机控制后的位置误差是多少?这有什么规律吗?17.离散系统的脉冲响应函数为g(n)=0.5δ(n)+δ(n−1)+0.5δ(n−2),(1)求频率特性;(2)画出幅频和相频特性曲线。18.求第8题移动平均去噪系统的频率特性,并画出幅频特性曲线。19.离散系统为:r(n)y(n)(1)y(n)−0.8y(n−1)=r(n);1(2)图8-51系统。z对上述两个系统,试分别(1)求频率特性;(2)画出幅频和相频特性曲线;(3)说明是FIR滤波器还是IIR滤波器,是递归滤波器还是非递归滤波器。图8-51离散系统20.试分别判断第4、5、17题系统是FIR滤波器还是IIR滤波器。21.理想带通滤波器为jωT⎧⎪140πrad/s≤ω≤100πrad/sG(e)=⎨⎪⎩0其他设采样周期为T=4ms,用矩形窗法设计FIR滤波器,并列出滤波输出的计算公式。22.用双线性变换法重做第1题。并判断两种离散化方法所得系统的稳定性。23.用双线性变换法重做第2题。并判断两种离散化方法所得系统的稳定性。24.用双线性变换法设计数字3阶巴特沃斯低通滤波器,采样频率为1.2kHz,截止频率为400Hz。25.试设计数字3阶巴特沃斯带通滤波器,采样频率为100kHz,通带为12.5kHz∼37.5kHz。20
26.仍是图8-50(b)系统,但采样周期T=0.5s,数字控制器待设计。要求的性能指标为:Kv≥1,σ≤30%,t≤6s,试用连续系统等效法设计数字控制器,并写出编程用的计算公式。s27.试小结连续系统离散化的方法。习题91.对于图3-29的汽车悬挂系统,如果把x(t)和y(t)做为输出,求传递函数矩阵。2.对于图3-40的直流电动机,如果把M(t)也做为一个输入,求传递函数矩阵。L3.双输入双输出系统由下面的微分方程组描述,求传递函数矩阵:⎧&y&1+2y&1+3y2=u1+u2⎨⎩&y&2+3y&1+y1−y2=u2+u&14.传递函数矩阵的全解耦除了难以准确实现以外,还会带来不稳定等不良影响,所以经常采用的是部分解耦而非全解耦。图9-54(a)是两种液体混合的管路,需要控制混合后液体的流量和成分。流量和成分分别用调节器1和调节器2控制。这是有相互影响的两个回路。现希望消除流量回路对成分回路的影响,设结构图为图9-54(b)(成分回路对流量回路的影响未画出),试求解耦环节的传递函数Gc(s)。部分解耦与第4章的前馈补偿有关系吗?液体2调节器2成分给定检测流量给定调节器1,阀:G(s)流量1液体1成分检测Gc(s)交连:G3(s)流量检测成分给定调节器2,阀:G(s)成分2调节器1流量给定检测(a)(b)图9-54部分解耦5.双输入双输出系统的动态方程如下,试把它写为矩阵形式,并画状态变量图:⎧x&1=x2+u1⎪⎪x&2=x3+2u1−u2⎪⎨x&3=−6x1−11x2−6x3+2u2⎪⎪y1=x1−x2⎪⎩y2=2x1+x2−x36.系统为&y&+3y&+2y=3u&+u,试选择状态变量列写动态方程,并画状态变量图。7.对于第2题的直流电动机系统,试以θy、θ&y和电枢电流ia为状态变量列写动态方程,并画出状态变量图。8.一个匀速直线运动的物体,试分别以它的位置和速度作为状态变量写动态方程。9.对于图3-59的加速度计,设加速度不变,且把它也设为一个状态变量,试列写动态方程。10.系统结构见图9-55,试以图中的x1、x2、x3为状态变量列写动态方程,并画出状态变量图。11.试列写图9-56所示非线性系统的动态方程。21
22Kuxx=yreuy21s+3s(s+1)s(s+a)x3su=f(e)图9-55按指定的状态变量写动态方程图9-56非线性控制系统km&12.图9-57是登月舱在月球软着陆的示意图,其中m为登月舱质量,g为月球的重力加速度,y为离地面的距离,反向推力为km&(k为常数)。设状态变量和输入变量为yx1=y,x2=y&,x3=m,u=m&试列写系统的动态方程。它是线性定常的吗?mg13.对第6题,设状态变换⎧x1=~x1+~x2⎨~~⎩x2=−x1−2x2试写出变换矩阵P和状态变换后的动态方程。图9-57登月舱软着陆系统14.设2阶系统(A,B,C)的特征值为共轭复数σ±jω,这时如果用状态变换把它化为特征值标准形,则系统矩阵中将出现复数,从而给计算带来不便。这时,可以用状态变换把系统矩阵化为形如~−1⎛σω⎞A=PAP=⎜⎟⎜⎟⎝−ωσ⎠的模态标准形。当特征值为实数,则模态形就是对角形。(1)试证:这时的变换矩阵为P=()αβ其中列向量α和β分别是特征值σ+jω所对应的特征向量的实部和虚部。(2)利用上述结论将矩阵⎛−21⎞A=⎜⎟⎜⎟⎝−17−4⎠化为模态标准形。15.对第6题,化简状态变量图求传递函数。16.求第5题的传递函数矩阵。17.对第6题和第13题,试分别由动态方程求传递函数,看与原已知是否相一致。18.对于第6题,试分别列写能控标准形、能观测标准形的动态方程,并与第6题的结果相比较。19.系统的微分方程为&y&+4y&+3y=u&&+6u&+8u试分别列写能控标准形、能观测标准形和对角标准形的动态方程。20.系统的传递函数为52(s+1)(s+2)求若当标准形的动态方程。21.用2种方法求下列状态方程的矩阵指数,并求初值问题的解:22
⎧⎛01⎞⎛1⎞⎧⎛−30⎞⎛0⎞(1)⎪x&=⎜⎜−4−5⎟⎟x+⎜⎜1⎟⎟u,u=1(t);(2)⎪x&=⎜⎜0−3⎟⎟x+⎜⎜1⎟⎟u,u=1(t);⎨⎝⎠⎝⎠⎨⎝⎠⎝⎠⎪()T⎪()T⎩x(0)=10⎩x(0)=10⎧⎛−100⎞⎛0⎞⎧⎛02⎞⎛0⎞⎪⎜⎟⎜⎟(3)⎪x&=⎜⎜−20⎟⎟x+⎜⎜1⎟⎟u,u=1(t);(4)⎪x&=⎜0−21⎟x+⎜1⎟u,u=1(t)⎨⎝⎠⎝⎠⎨⎜⎟⎜⎟⎪x(0)=()10T⎪⎝00−2⎠⎝0⎠⎩⎪()T⎩x(0)=10022.系统的状态转移矩阵(矩阵指数)为⎛2e−t−5e−2t4e−t−e−2t⎞Φ(t,0)=⎜⎟⎜−2e−t+3e−2t−3e−t+2e−2t⎟⎝⎠求系统矩阵A。23.判断下面系统状态的零输入稳定性:⎛−110⎞⎛1⎞⎛−110⎞⎜⎟⎜⎟⎜⎟(1)x&=⎜0−11⎟x+⎜0⎟u;(2)x&=⎜0−10⎟x⎜⎟⎜⎟⎜⎟⎝−30−3−1⎠⎝0⎠⎝00−2⎠24.试证:如果系统矩阵为14题所提及的模态标准形⎛σω⎞A=⎜⎜⎟⎟⎝−ωσ⎠则矩阵指数为1⎛eσtcosωteσtsinωt⎞ux1eAt=⎜⎟s⎜−eσtsinωteσtcosωt⎟⎝⎠1125.由能控性定义判断下列系统的状态能控性:x2x3=yss⎧⎛−10⎞⎛1⎞(1)⎪⎨x&=⎜⎜⎟⎟x+⎜⎜⎟⎟u;−2−3⎝0−2⎠⎝0⎠⎪⎩y=()10x图9-58能控能观性(2)图9-58系统。26.判断下列系统的状态能控性:⎛100⎞⎛1⎞⎛−100⎞⎛1⎞⎜⎟⎜⎟⎜⎟⎜⎟(1)x&=⎜02−2⎟x+⎜0⎟u;(2)x&=⎜0−20⎟x+⎜0⎟u;⎜⎟⎜⎟⎜⎟⎜⎟⎝−110⎠⎝0⎠⎝00−3⎠⎝1⎠⎛−400⎞⎛1⎞⎛−310⎞⎛1−1⎞⎜⎟⎜⎟⎜⎟⎜⎟(3)x&=⎜0−40⎟x+⎜2⎟u;(4)x&=⎜0−30⎟x+⎜00⎟u;⎜⎟⎜⎟⎜⎟⎜⎟⎝001⎠⎝1⎠⎝00−1⎠⎝20⎠⎛2000⎞⎛2⎞⎛0100⎞⎛0⎞⎜⎟⎜⎟⎜⎟⎜⎟(5)⎜0−510⎟⎜0⎟;(6)⎜0010⎟⎜0⎟x&=⎜00−51⎟x+⎜0⎟ux&=⎜⎟x+⎜⎟u00010⎜⎟⎜⎟⎜⎟⎜⎟⎜⎝000−5⎟⎠⎜⎝1⎟⎠⎜⎝123−5⎟⎠⎜⎝1⎟⎠由本题,不稳定的系统是否一定不能控?27.系统(A,B,C)的各系数矩阵为23
⎛200⎞⎛1⎞⎜⎟⎜⎟mA=⎜041⎟,B=⎜0⎟,C=()1102⎜⎟⎜⎟l⎝004⎠⎝1⎠2mθ试用状态变换把它化为能控标准形。12l1m2m128.状态方程为⎛11⎞⎛1⎞l2l1x&=⎜⎜⎟⎟x+⎜⎜⎟⎟u⎝01⎠⎝1⎠θ1θ2θ1求状态反馈矩阵,使闭环极点为−2和−3,并画出状态变量图。u(t)Mu(t)M29.(1)试以直觉来猜测一下图9-59的双摆系统(假定两个摆在两个平行的平面内运动而不碰撞)(a)(b)在m1、m2、l1、l2的何种条件下将是能控的?图9-59双倒立摆系统的能控性(2)写出系统的线性化动态方程,并用其能控性矩阵求能控的条件。30.由能观测性定义判断第25题系统的状态能观测性。31.判断下列系统的状态能观测性:⎧⎛2−1⎞⎛1⎞⎧⎛−10⎞⎛1⎞(1)⎪⎨x&=⎜⎜2−1⎟⎟x+⎜⎜0⎟⎟u;(2)⎪⎨x&=⎜⎜0−2⎟⎟x+⎜⎜0⎟⎟u;⎝⎠⎝⎠⎝⎠⎝⎠⎪⎩y=()11x⎪⎩y=()10x⎧⎛10−1⎞⎛1⎞⎧⎛210⎞⎛1⎞⎪⎜⎟⎜⎟⎪⎜⎟⎜⎟⎪x&=⎜−1−20⎟x+⎜1⎟u(3)⎪⎨x&=⎜020⎟x+⎜1⎟u;(4)⎪⎜⎟⎜⎟;⎜⎟⎜⎟⎨⎝301⎠⎝1⎠⎪⎝00−3⎠⎝1⎠⎪100()⎛⎞⎪⎩y=011x⎪y=⎜⎜⎟⎟x⎪⎩⎝0−10⎠⎧⎛−2100⎞⎪⎜⎟⎧⎛000−1⎞⎪⎜0−200⎟⎪⎜⎟(5)x&=⎜⎟x;(6)⎪⎪x&=⎜100−2⎟x⎪⎪⎜00−31⎟⎜⎟⎨⎜⎟⎨⎜010−3⎟⎪⎝000−3⎠⎪⎜⎟⎪1000⎪⎝001−4⎠⎛⎞()⎪y=⎜⎜⎟⎟x⎪⎩y=0001x⎪⎩⎝00−10⎠32.用状态变换把第27题系统化为能观测标准形。33.对于本书多次提到的倒立摆系统,试自己选择观测器的特征值,设计状态观测器。34.对于第9题的加速度计,试设计状态观测器,以观测加速度的瞬时值。35.系统的传递函数为s+12s+3s+2试写能控但不能观测的动态方程。36.讨论第19题系统的能控能观性。37.讨论第7题系统的能控能观性。38.讨论9.4节例9的实现是否是最小实现。39.设宇宙飞船的质量为m(t),离月球表面距离为h(t),垂直速度为v(t),发动机推力为u(t),月球的重力加速度为g,除燃料外的飞船质量为M,初始燃料的质量为F。飞船的状态方程易得为24
⎧h&(t)=v(t),h(0)=h0⎪⎪u(t)⎨v&(t)=−g+,v(0)=v0⎪m(t)⎪⎩m&(t)=−Ku(t),m(0)=M+F要求飞船在月球上实现软着陆,即指定的终点状态为h(tf)=v(tf)=0对其中的tf并无限制。发动机推力的限制为0≤u≤α同时要求所剩燃料最多,即满足以下终点性能指标:J=−m(tf)=min试用最大值原理求闭环最优控制律u∗(t)。提示:这时的横截条件为∂Jph(tf)待定,pv(tf)待定,pm(tf)=−=1∂m40.被控对象的状态方程为x&1=x2,x&2=u控制量u(t)不受限制,二次型的性能指标为1∞222J=∫(x1+2x1x2+2x2+u)dt20求最优控制u∗(t),使性能指标为最小。41.对于本书多次提到的倒立摆系统,设二次型的性能指标为∞TJ=∫(xQx+uRu)dt0其中Q=单位阵,R=0.01,试求最优的状态反馈阵。42.离散系统的差分方程为y(n+2)+3y(n+1)+2y(n)=2u(n+1)+3u(n),试分别写能控标准形和能观测标准形的动态方程,并画相应的状态变量图。43.计算机控制系统如图9-60。为了设计数字控制器,需要把被控对象的数学模型化为离散系统。(1)求对象的离散动态方程(采样周期为1s);(2)画出离散化后的闭环系统结构图(其中的信号全部是离散序列而并非像图9-60这样有连续信号);(3)开环系统是否稳定?⎧⎛01⎞⎛0⎞r(n)数字控制器u(n)零阶保持器u(t)被控对象:⎪⎨x&=⎜⎜⎟⎟x+⎜⎜⎟⎟uy(t)⎝02⎠⎝1⎠⎪⎩y=()10x模数转换图9-60计算机控制系统44.对于第8题,希望能讨论该物体在采样时刻(采样周期为1)的运动规律,试求它的离散化状态方程。45.系统矩阵⎛010⎞⎜⎟A=⎜001⎟⎜⎝−6−14⎟⎠100求A。25
46.如图9-61所示的热力系统,需要检测内室温度x和外室温度x,但其中只有内室温度可以测量,12而外室温度x2不可直接测量。为了估计x1和x2,通过辨识实验可得到离散动态方程为x(k)2⎧⎛⎜x1(k+1)⎞⎟=⎛⎜0.6270.361⎞⎟⎛⎜x1(k)⎞⎟A/Dy(k)⎪⎜x(k+1)⎟⎜0.0900.833⎟⎜x(k)⎟⎪⎝2⎠⎝⎠⎝2⎠x(k)⎨1⎪⎛x1(k+1)⎞⎪y(k+1)=()10⎜⎜⎟⎟⎩⎝x2(k+1)⎠试设计状态观测器以观测x和x,并画出原系统和状态观测器12的状态变量图。图9-61温度检测的状态观测习题101.分别用李亚普诺夫第一法和第二法判别非线性系统平衡状态的稳定性:⎧x&=x⎧⎪x&=−x+x+x(x2+x2)(1)12;(2)⎨112112⎨&222⎩x2=−x1−(1+x2)x2⎪⎩x&2=−x1−x2+x2(x1+x2)2.试证:10.4节例11中式(10-25)和式(10-28)的平衡状态是大范围渐进稳定的。3.用李亚普诺夫第二法重做习题9第40题。4.系统的运动方程为&y&+y&+y=0,(1)用等斜线法画出相轨迹图;(2)近似地画出在初始条件y(0)=某正数,y&(0)=0时的y-t图。5.图10-58是简化的带有库仑摩擦的随动系统,输入为零。设初始条件为(1)e(0)=2.2,e&(0)=0;(2)e(0)=3.5,e&(0)=0。试在e-e&平面上画出系统的相轨迹,并分析库仑摩擦的不良作用。6.图10-59是带有饱和特性的测速反馈系统,设输入为零。试在e-e&平面上画出系统的相轨迹。2fre5y2s1fy&f−1f1y&s11re2y&y1y&ss图10-58带有库仑摩擦的随动系统图10-59带有饱和特性的测速反馈系统7.设10.6节例7中(图10-44)的K=1,T=1,M=10,h=0.1,(1)试用描述函数法求振荡的频率和幅度;(2)如果输入为单位阶跃函数,画稳态输出的波形。26
答案习题11.判断的依据是这些信号各自的定义。题号(1)(2)(3)(4)(5)(6)(7)(8)(9)确定性√√√√√√√√×连续√×√×××√√√一维√√×××√(×)√×√2.判断的依据是这些系统各自的定义。题号(1)(2)(3)(4)(5)(6)(7)定常×√×√×××线性×√√√×××确定×√√√×××动态√√××√√√可逆√√√××××连续√√√××√√单输入单输出√√√×√××一维√√√√√√√tf(2)f=m&x&=mv&,v=∫dt(设初速度为零)0m(3)f=ma,a=f/m(m不断变小)(4)一个月的多个数据→一个数据3.判断的依据是线性系统和定常系统的定义,可参考例1-11∼例1-19。对于常系数线性常微分方程(第1、3、10题)和常系数线性差分方程(第9题),都是线性且定常的。题号(1)(2)(3)(4)(5)(6)(7)(8)(9)(10)(11)(12)线性√√√√×√××√√√√定常√×√√×√√×√√√×y(t)=r(2t)r(t)(4)输入与输出见图,可见是线性且定常的。t(11)对于方程两边求导,则得y&(t)=3r&(t)+6&r&(t)+5r(t)更清楚地看出是线性定常系统。(12)输入输出见图a。当输入延迟τ,如果是定常系统,则输出应是图b,但实际是图c,故是时变系统。27
r(t)y(t)r(t)y(t)r(t)=y(t)06t06τt06τt(a)(b)(c)4.开环与闭环的区别:闭环从动作的结果引出信号到输入端,然后影响后续的动作或状态;而开环则不管动作的结果。按扰动的前馈与普通开环的区别:按扰动的前馈根据扰动的情况修正动作,而普通开环不管扰动。按扰动的前馈与闭环的区别:按扰动的前馈是根据扰动来修正动作,而闭环是根据结果来修正动作。(1)前馈,(2)反馈,(3)前馈,(4)开环,(5)开环,(6)反馈,(7)开环,(8)开环,(9)前馈→反馈,(10)反馈,(11)反馈。5.原理:当uf≠r,∆u≠0,控制作用使∆u变小,直到uf=r,∆u=0,电机停止动作,这就是记录笔的稳态位置。当r=0,最终记录笔停在u=0的位置即电位器的中点(所画曲线f的零点);对不同的r,记录笔的位置也不同;由于u与记录笔的位置成正比,故记录笔的f位置也与r成正比,即所画曲线的幅度与r成正比。分类:随动系统、电力传动系统。画原理框图须注意:凡信号线只能是某个信号(物理量),而框则只能是物体。画原理框图的步骤:(1)确定被控制量,它总是与控制系统的目的相联系。(2)把被控制量画在图的最右边。(3)按照定义,确定被控对象(对于完全同步运动的几个物体,往往算作同一个框)。(4)分析什么信号影响到被控制量,这既要考虑正常的驱动因素(往往是控制量),又要考虑扰动因素(扰动量)。(5)按照从后往前的顺序,实事求是地逐步画完整个图,要注意按照定义确定给定输入量(它最显著的特点是,如果增大它,则能增大被控制量),并把它画在最左边。电源电压阻力控制(调节)器(控制量)r(t)∆u放大功放驱动电流电机、减速器、绳轮和笔笔的位置u执行元件被控对象f电位器测量元件6.a)分类:过程控制系统、恒值系统。降低A点位置即减少给定输入量可提高水位。28
水压出水流量给定元件控制器执行元件A点电位器A点电位∆u放大电机、减速器、阀进水流量水箱水位位置(控制量)被控对象杠杆右端电位电位器杠杆浮子测量元件b)分类:同a)。为叙述方便起见,设杠杆水平时阀正好关闭,这时浮子的位置就是希望水位。则原理框图如下。缩短浮子到杠杆的杆长即增大给定输入量可提高水位。水压出水流量控制器执行元件杠杆水平时浮子的高程杠杆阀进水流量水箱水位浮子的实际高程浮子测量元件c)分类:同a),但,是开环控制系统。只有人为地向水箱倒水才能提高水位。出水流量杠杆阀进水流量水箱水位控制器执行元件被控对象7.散热、被加热物性能给定元件控制器执行器电位器1电位器1滑臂与左端放大电机、减速、电加热电流电炉温度滑臂位置间的电压位器2与电阻丝(控制量)被控对象热电偶8.原料湿度、谷物速度控制器执行器湿度给定调节器阀水的流量加湿器湿度(控制量)被控对象湿度检测29
9.被控对象:轮船(或飞机),执行元件:电机、减速、船舵(或尾翼),控制量:船舵角度,控制器:调节器、放大、驱动。飞机或轮船自动行驶时,指定航向并不是随时变化的,而是过一段时间规划一次,即是一条折线。故可认为是恒值系统,但认为是随动系统也无妨。10.原理:这里有两个恒值控制系统:①线速度控制系统,其目的是使纸张的生产匀速;②张力维持系统中活动臂的角度控制系统,其目的是使张力维持系统不至于瓦解。电源电压阻力控制器执行器速度给定调节器驱动驱动电流电机、纸卷线速度(控制量)被控对象(时变)速度传感器测量元件张力与重力控制器执行元件角度给定调节器放大、制动器制动力活动臂角度(制动器不断磨损)(控制量)被控对象角度传感器测量元件这里要注意的是,这是两个时变系统:①由于纸卷越来越粗,转动惯量越来越大,故纸卷是非定常的;②由于制动器有磨损,同样的电压输入所得到的制动力却不一定相同,即它也是时变的。11.电源电压、散热、面包大小控制器执行器(控制量)温度给定调节器驱动、电机、传送带传送带速度烤箱温度被控对象温度检测12.出发方向、风控制器执行器激光点激光检测目标方向调节器驱动、舵舵角导弹航向(控制量)被控对象实际航向航向检测k14.Δq=Δp2p0习题21⎛ωτ⎞1.(1)直接查傅氏变换表:F[Gτ(t)]=sin⎜⎟ω⎝2⎠30
11−jω−jω−(t−1)−jωt−(1+jω)t+1−1τ−1τ−jωe−e(2)F[f(t)]=eedt=edt=edτ=e=∫∫∫11+jω1+jω1+jω001−t−(t−1)也可:f(t)=ee⋅1(t)−e⋅1(t−1),然后利用延迟性质查傅氏变换表求。(3)F[f(t)]=F[G(t)]F[δ(t−t)]=1sin⎛ωτ⎞e−jωt0τ0⎜⎟ω⎝2⎠2.(1)利用频域微分性质和尺度变换性质:11dF(ω)F[tf(2t)]=F[−j(2t)f(2t)]=ω=ω/2−2j−4jdω1dF(ω)(2)F[(t−2)f(t)]=F[tf(t)]−2F[f(t)]=−2F(ω)−jdω11dF(ω)⎛ω⎞(3)F[(t−2)f(−2t)]=F[(−2t)f(−2t)]−2F[f(−2t)]=ω=−ω/2−F⎜⎟−2−4dω⎝−2⎠df(t)(4)令ϕ(t)=,则F[ϕ(t)]=jωF(ω),故dt⎡df(t)⎤1ddF(ω)Ft=F[tϕ(t)]=[jωF(ω)]=−F(ω)−ω⎢⎥⎣dt⎦−jdωdω−jω−jω(5)F[f(1−t)]=F{f[−(t−1)}=F{f[−t]}e=F(−ω)e1dF(ω)1dF(ω)−jω(6)由于F[tf(t)]=,故由上一小题,有F[(1−t)f(1−t)]=eω=−ω−jdω−jdω6.(1)极点为s=−1,故F(s)的收敛域为Re(s)>−1,包括虚轴,故f(t)存在傅氏变换,且1−jτω为F[f(t)]=F(s)s=jω=ejω+1(2)极点为s=−1和s=1,故F(s)的收敛域为Re(s)>1,不包括虚轴,故f(t)不存在傅氏变换。习题31.与第1章习题第3题相比,这里要按照3.1.5段的修正来判断。即有初始状态y(0)和输入r(t)这2个“输入”。当判断是否为线性定常时,要把其中1个“输入”设为零,然后判断输出与另1个“输入”的关系是否为线性定常。只有对于这2个“输入”都分别为线性定常,整个系统才是线性定常的。(1)线性、定常;(2)线性、时变;(3)非线性、定常;(4)非线性、定常。2.(1)Ty&(t)+y(t)=δ(t),(Ts+1)Y(s)=11−11−t/TY(s)=,g(t)=L[Y(s)]=e⋅1(t)Ts+1T(2)先计算r1(t)=1(t)时的零状态响应:∞1−(t−η)/Tt1−(t−η)/T−t/Ty1f(t)=r1(t)∗g(t)=∫−∞1(η)e⋅1(t−η)dη=∫0edη=1−e,(t>0)TT−(t−τ)/T根据定常系统的定义,r2(t)=1(t−τ)时的零状态响应为y2f(t)=1−e,(t>τ)。(3)最后,根据线性系统的叠加原理,总响应为31
⎧y=1−e−t/T0τ110s+15.用“电路”中的运算阻抗法,图3-60:G(s)=;图3-61:G(s)=−。0.2s+12s相应的微分方程分别为0.2y&(t)+y(t)=r(t),2y&(t)=−10r&(t)−r(t)。6.第1种方法:先求传递函数,即传递函数=输出的拉氏变换/输入的拉氏变换。再用拉氏反变换求脉冲响应函数。第2种方法:先求脉冲响应函数,即脉冲响应函数=零初状态下的单位阶跃响应的导数。再用拉氏变换求传递函数。21−2t−t结果都是:G(s)=1+−,g(t)=δ(t)+2e−es+2s+1G+GGGG121238.a)G(s)=;b)G(s)=1+GG(1+GH)(1+GH)+GH23113322Y(s)G1G29.=R(s)1+GG(H+1)121Y(s)G4(G1G2+G2+G3)Y(s)G410.=;=R(s)1+G(G+G)N(s)1+G(G+G)423423Y(s)400s+100E(s)10(3s+5)(4s+1)11.=;=22R(s)12s+23s+25R(s)12s+23s+2512.可由题8验证结果。Y(s)G1+G2−2G1G2E(s)1−G1G213.=;=R(s)1+G+G−3GGR(s)1+G+G−3GG1212121215.这个负号是由于测速反馈须是负反馈,实际接线时从测速机的负端引出反馈信号。−Ks4角度1/11-3-2−K电动机角度31/1118.判断稳定性的准则:①若已知传递函数、脉冲响应函数或特征方程,用BIBO稳定或零输入稳定的充要条件、必要条件、代数稳定判据判断;②若已知零输入响应,用零输入稳定的定义判断;③若已知暂态分量、稳态分量、零状态响应,则无法判断;④对于未知其数学模型或输出数学表达式的实际系统,用稳定的定义或例3-58∼3-62的方法判断。结果是:(1)不稳;(2)不能判断;(3)稳;(4)不稳;(5)不稳;(6)不能判断;(7)不能判断;(8)不能判断;(9)稳;(10)不稳;(11)不稳;(12)不稳。19.(1)时间∆t内水位的升高与净进水流量成正比,与时间∆t成正比,即∆h=K(r-q)∆t其中K为比例常数。两边除以∆t,且令∆t→0,得h(s)Kh&=K(r−kh),h&+Kkh=Kr,=r(s)s+Kk32
故稳定。若换成泵,则有&defh(s)Kh=K(r−q)=Kr1,=r1(s)s故不稳。(2)从物理概念来看,稳定意味着,如果输入不变,当初始状态不同时,输出也能趋于同一输出。当从水箱舀出一瓢水,如果最终水位能恢复原样,则稳定。容易判断,对本题,舀出一瓢水后,水位确实能复原,故稳定。但如果换成泵,即使出水量等于进水量,当舀出一瓢水,显然水位不能复原,不稳定。20.(1)不稳,这是由于,当遇到干扰(如舀去一瓢水)时无法恢复原状。(2)不稳。骑车者车体(3)稳。(4)整个系统见图,作为闭环系计划姿态控制力车体姿态统必须稳定。但本题问的是其中“车体”骑车者的感官的这一部分。按照零输入稳定的定义,设控制力不变,则无论开始时车体有多么平衡,最终也必将翻倒。故知“车体”不稳。(5)稳,这是由于,对于某一室外温度,室内温度总能恒定在相应的一个值。(6)不稳,这是由于,由于有利息,存款越变越多。(7)不稳,这是由于,藏羚羊的数目离其平衡数(即自然环境所能供养的数目)越来越远。(8)稳,这是由于,藏羚羊的数目离其平衡数越来越近。21.见例3-58∼例3-62。(1)a;(2)a。22.不稳。23.(a)判断稳定性要用闭环传递函数,即11Gb(s)==2(2+1)(3+1)+(−1)2sss12s+11s+1由二次方程的求根公式可知(请同学们自己推导)下述常用的命题:如果系数全为正,则二次三项式的根必在左半复平面。故本题稳定。(b)前向通路的传递函数为s+11010(s+1)×=ss(s+1)+20s2s(s+21)故闭环传递函数为10(s+1)10(s+1)Gb(s)==232s(s+21)+10(s+1)s+21s+10s+10用代数稳定判据得知,系统稳定。K24.闭环传递函数为G(s)=,令s=s−1,则闭环特征方程为b21(1−0.1K)s+0.1Ks+K22(1−0.1K)(s−1)+0.1K(s−1)+K=(1−0.1K)s+(0.3K−2)s+(0.8K+1)1111Re(s)<−1等价于Re(s)<0,又由于是2阶系统,故又等价于特征多项式各项系数为正,即1⎧1−0.1K>0⎪⎨0.3K−2>0⎪⎩0.8K+1>0得33
20/31rad/s⎩傅氏反变换:111⎡1⎤−jωτjωt⎡1⎤−j(τ−t)ωy1(t)=∫⎢+πδ(ω)⎥eedω=∫⎢+πδ(ω)⎥edω2π−1⎣jω⎦−1⎣jω⎦1111⎡cos(t−τ)ωsin(t−τ)ω⎤11sin(t−τ)ω=+∫⎢+⎥dω=+∫dω22π−1⎣jωω⎦2π0ω(t−τ)11sinθdef11=+∫dθ=+Si[t−τ]2πθ2π0上面的Si[•]称为正弦积分函数。本题理想滤波器的输入是1(t-T)-1(t),故响应为1[Si(t−T−τ)−Si(t−τ)]。π7.截止频率为ω的理想低通滤波器的脉冲响应函数在例5-12已求出为cAω−10cg(t)=F[G(ω)]=Sa[(t−τ)ω]LLcπ故理想高通滤波器的脉冲响应函数为Aω−1−10cg(t)=F[G(ω)]=F[A−G(ω)]=Aδ(t)−Sa[(t−τ)ω]HH0L0cπ理想带通滤波器的脉冲响应函数为AωAω−1−10201g(t)=F[G(ω)]=F[G(ω)−G(ω)]=Sa[(t−τ)ω]−Sa[(t−τ)ω]BBH1H221ππ8.ω=2kHz=4πkrad/sc1G(s)=Ls4+2.613s3+3.414s2+2.613s+1s=s/ωc37
4ωc=432234s+2.613ωs+3.414ωs+2.613ωs+ωcccc119.G(s)==L32s=s/(20kπ)−33−22−1s+2s+2s+1(20kπ)s+2(20kπ)s+2(20kπ)s+1截止频率为1/(6kπ)rad/s的低通滤波器为11G(s)==L132s=6kπs3322s+2s+2s+1(6kπ)s+2(6kπ)s+2(6kπ)s+1截止频率为6kπrad/s的高通滤波器为1G(s)=G(s)=HL1s=1/s3−32−2−1(6kπ)s+2(6kπ)s+2(6kπ)s+1故带通滤波器为G(s)=G(s)G(s)BLH10.本题很容易,目的是为了认识对数幅频和对数相频曲线。11.(1)L(ω)dB40200.10.20.5110ωϕ(ω)0°-90°-180°0.10.20.5110ω(2)L(ω)dB-20-40-60-80-100-1200.112102040100ωϕ(ω)0°-90°-180°-270°0.1110100ω(3)38
L(ω)dB4020120-20-40-600.112410100ωϕ(ω)0°-90°-180°-270°0.1110100ωL(ω)Oω−20ϕ(ω)ππ/201/Tω(4)非最小相位环节jTω−1的对数幅频特性曲线与环节jTω+1的相同,而相频特性为∠(jTω−1)=π−arctan(Tω)见图。在此基础上,容易画出串联有该环节系统的伯德图。12.ω为10rad/s时为−40dB,基本已接近于y(t)零,故sin10t的响应基本是零,无须考虑。而ω20为1rad/s时的分贝值为20,即幅频特性值为10,0t/s故2sint的稳态响应的幅值为2×10=20。波形大致2π如图。39
13.(1)如果是最小相位系统,则按幅频L(ω)dB特性渐近线,传递函数应为−20KG(s)=0dB110ωs(Ts+1)ϕ(ω)即相频特性应渐近于−180°(见右图中粗虚线),ω但图5-50(右图中粗实线)却并非如此,这说−90°明它不是最小相位的。−180°(2)由书图5-33和右图知,1/τ>10,即τ<0.1。14.先用折线逼近曲线,再求传递函数。这是很重要的求传递函数的实验方法。16.jjjjjjO1OKO1OOO12ωn22G(s)=KG(s)=Ts+1G(s)=1/sG(s)=sG(s)=G(s)=Ts+2ζTs+12s+2ζωns+ωn17.(1)(2)(3)ImImImReReRe习题62.附加零点就是串联上一个高通滤波器,它使高频分量提升,从而加快响应速度,振荡趋势变大,即阻尼变小。而附加极点就是串联上一个低通滤波器,作用恰相反。3.(1)稳;(2)稳;(3)不稳。4.00.5);(2)X(z)=(z<1/3);z−0.51−3z0.5zz−1−2(3)X(z)=+(0.50)1−0.5zz−0.513.(1)x(n)={1,4,7,…}(n=0,1,2,…)(2)x(n)={…,8,5,2}(n=…,-2,-1)14.定义法略,下面是部分分式法的结果:n(1)x(n)=−10+10×2;(2)x(n)=−3−2n;n1020n(3)x(n)=5δ(n)−10×1(n)+5×2;(4)x(n)=×1(n)+×(−2)33jωT−jmωT−ane16.(1)F[δ(n−m)]=e(2)F[e⋅1(n)]=jωT−ae−ejωT17.(1)、(3)、(4)存在频谱,等于把双边Z变换中的z代换成e;(2)不存在频谱。习题81.(10T+5)y(n)−5y(n−1)=(10T+1)r(n)−r(n−1))2.y(n)−y(n−1)=Tr(n−1)100100n100n4.(1)y(n)=1(n)+0.2−0.3={0,0,1,1.5,⋅⋅⋅}56871.53n6.3(2)y(n)=−0.1+1(n)={0.53,0.683,0.69983,⋅⋅⋅}991n1n(3)y(n)=(−1)+1={1,0,1,0,⋅⋅⋅}22z+25.G(z)=,g(n)={1,2},n=0,1zY(z)1Y(z)0.53z+0.16.(1)=(2)=2R(z)z−0.5z+0.06R(z)z−0.1−2T1−e2T2T−2Tn7.G(z)=;g(n)=(1−e)δ(n)+(e−1)e−2Tz−e−2T−2Ty(n)−ey(n−1)=(1−e)r(n−1)−2z9.(a)G(z)=−2−11+z(1+z)2−0.1−0.1⎡T10(z−1)⎤24z−(34.8+12e)z+(12+10.8e)(b)G(z)=1.2−10++=k⎢−0.1T⎥−0.1⎣z−1z−e⎦(z−1)(z−e)2−0.1−0.1Gk(z)24z−(34.8+12e)z+(12+10.8e)Gb(z)==1+G(z)2−0.1−0.1k25z−(35.8+13e)z+(12+11.8e)10.(1)不稳;(2)稳;(3)临界不稳;(4)稳12.(a)用w变换;(b)由于是2阶,可直接求出特征根来判断。44
⎡T10(z−1)⎤16.第9题已求出开环Z传递函数为Gk(z)=1.2⎢−10++−0.1T⎥,1型,故位置⎣z−1z−e⎦误差为零。这是普遍规律,即模拟调节器数字化后开环型别不变。17.(1)⎪G(ω)⎪G(ω)=F[g(t)]2=Z[g(t)]jωT1z=e−1−2=0.5+z+0.5z0π/2Tπ/T2π/Tω−jωT−j2ωT=0.5+e+0.5e∠G(ω)−jωTjωT−jωT0π/2Tπ/T2π/Tω=e(1+0.5e+0.5e)=e−jωT(1+cosωT)(2)见右图。-π1jωT119.(1)G(z)=,G(e)=,是IIR滤波器,是递归滤波器。−1−jωT1−0.8z1−0.8e−1jωT−jωT−1(2)G(z)=1+z,G(e)=1+e,g(n)=Z[G(z)]=δ(n)+δ(n−1),是FIR滤波器,计算输出时只与输入有关,故不是递归滤波器。π0.16π−1jωT1jωTjωTn1jωTn21.g(n)=F[G(e)]=∫G(e)ed(ωT)=∫ed(ωT)2π2π−π−0.16π0.16π110.16nπ=∫cos(ωTn)d(ωT)=sinθ0=0.16Sa(0.16nπ)πnπ0再对上式截尾、右移,可得因果FIR滤波器。2(z−1)+10s+10T(z+1)22.H(z)==2z−15(s+2)s=Tz+1⎡2(z−1)⎤5⎢+2⎥⎣T(z+1)⎦−1(10T+2)z+(10T−2)(5T+1)+(5T−1)z==10(T+1)z+10(T−1)−15(T+1)+5(T−1)z5(T+1)u(k)+5(T−1)u(k−1)=(5T+1)e(k)+(5T−1)e(k−1)2400×2π224.ω=tanrad/s=×1.73rad/sAT2×1200T45
3ωAG1(s)=3223s+2ωAs+2ωAs+ωAH(z)=G1(s)2z−1s=Tz+131.732=32⎛z−1⎞⎛z−1⎞2z−13⎜⎟+2×1.732⎜⎟+2×1.732+1.732⎝z+1⎠⎝z+1⎠z+1325.2(z+3z+3z+1)=3215.7z+15.1z+7.1z+1.725.由4.4节,带通滤波器是一个低通和一个高通滤波器的串联,故先分别求低通和高通数字滤波器,再把它们串联。习题9⎛⎜Cm−(Las+Ra)⎞⎟2.G(s)=⎜⎝s(Jis+fi)(Las+Ra)+CmKbiss(Jis+fi)(Las+Ra)+CmKbis⎟⎠22⎧⎪sY1+2sY1+3Y2=U1+U2⎧⎪(s+2s)Y1+3Y2=U1+U23.⎨,⎨22⎪⎩sY+3sY+Y−Y=U+sU⎪⎩(3s+1)Y+(s−1)Y=sU+U2112211212⎛s2+2s3⎞⎛Y⎞⎛11⎞⎛U⎞⎜⎟11⎜⎟=⎜⎟⎜⎟⎜⎝3s+1s2−1⎟⎠⎜⎝Y2⎟⎠⎜⎝s1⎟⎠⎜⎝U2⎟⎠−1⎛s2+2s3⎞⎛11⎞1⎛s2−3s−1s2−4⎞G(s)=⎜⎟⎜⎟=⎜⎟⎜3s+1s2−1⎟⎜s1⎟s4+2s3−s2−11s−3⎜s3+2s2−3s−1s2−s−1⎟⎝⎠⎝⎠⎝⎠本题指出了从输入输出微分方程组求传递函数矩阵的步骤。4.G流量GG流量cc2GG33成分给定+G+成分成分给定G++成分22检测检测GG=−G,G=−G/Gc23c32部分解偶就是前馈补偿。本题意在指出部分解偶的实际意义和方法。5.较容易,意在练习状态方程的矩阵形式和状态变量图。答案为⎡010⎤⎡10⎤⎢⎥⎢⎥⎡1−10⎤x&=⎢001⎥x+⎢2−1⎥u,y=⎢⎥x⎣21−1⎦⎢⎣−6−11−6⎥⎦⎢⎣02⎥⎦6.设x1=y,x2=y&−3u,则46
⎧⎛01⎞⎛3⎞⎪x&=⎜⎜⎟⎟x+⎜⎜⎟⎟u⎨⎝−2−3⎠⎝−8⎠⎪()⎩y=10x⎧Li&+Ri=u−Kiθ&⎪aaaaaby7.由图3-40直接得⎨,令x1=θy,x2=θ&y,x3=ia,最后得⎪⎩Jiθ&&y+fiθ&y=Cmia−ML⎛010⎞⎛00⎞⎜⎟⎜⎟⎛ua⎞x&=⎜0−f/JCm/(Ji)⎟x+⎜0−1/(Ji)⎟⎜⎜⎟⎟⎜⎟⎜⎟⎝ML⎠⎝0−Kbi/La−Ra/La⎠⎝1/La0⎠本题是从结构图求状态方程的实际例子。⎧x&1=x28.令x1=x,x2=x&,则⎨x&=0⎩210.由图直接得⎧x&2+3x2=2e=2(u−x1)⎪⎛001⎞⎛0⎞⎪&x&1+x&1=2(x2−x1)⎜⎟⎜⎟⎨,x&=⎜−2−30⎟x+⎜2⎟ux&=x⎪13⎜02−3⎟⎜0⎟⎪y=x⎝⎠⎝⎠⎩111.令x=y,x=y&,则由图得:&x&+ax&=Ku=Kf(r−x),最后得:12111⎧x&1=x2⎨⎩x&2=Kf(r−x1)−ax2⎧~&⎛−10⎞~⎛−2⎞⎛⎜11⎞⎟−1⎛⎜21⎞⎟⎪x=⎜⎜⎟⎟x+⎜⎜⎟⎟u13.P=⎜⎟,P=⎜⎟,⎨⎝0−2⎠⎝5⎠⎝−1−2⎠⎝−1−1⎠⎪()~⎩y=11x19.先求传递函数,得⎧⎛01⎞⎛0⎞⎧⎛0−3⎞⎛5⎞⎧⎛−10⎞⎛1⎞⎪x&1=⎜⎜⎟⎟x1+⎜⎜⎟⎟u⎪x&2=⎜⎜⎟⎟x2+⎜⎜⎟⎟u⎪x&3=⎜⎜⎟⎟x3+⎜⎜⎟⎟u⎨⎝−3−4⎠⎝1⎠,⎨⎝1−4⎠⎝2⎠,⎨⎝0−3⎠⎝1⎠⎪()⎪()⎪()y=52x+uy=01x+uy=3/21/2x+u⎩1⎩2⎩320.本题是由传递函数求约当标准型的例子。⎡−111⎤⎧1/s⎡1/s⎤1/s⎫G(s)=⎢+2+⎥×5=⎨⎢−1+⎥+⎬×5⎣s+1(s+1)s+2⎦⎩1+1/s⎣1+1/s⎦1+2/s⎭1x&x-122s1x&x11su5y1x&x33s247
⎧⎛−110⎞⎛0⎞⎪⎜⎟⎜⎟⎪x&=⎜0−10⎟x+⎜1⎟u⎨⎜⎟⎜⎟⎪⎝00−2⎠⎝1⎠⎪⎩y=()5−55x⎡31−t1−4t⎤⎛−t−4t−t−4t⎞−e−e21.(1)eAt=⎜(4e−e)/3(e−e)/3⎟,⎢236⎥⎜−t−4t−t−4t⎟x=⎢5111⎥⎝(−4e+4e)/3(−e+4e)/3⎠⎢−+e−t+e−4t⎥⎣4312⎦−3t⎛e−3t0⎞⎡e⎤At⎢⎥(2)对角型,直接得e=⎜⎟,x=11−3t⎜0e−3t⎟⎢−e⎥⎝⎠⎣33⎦(3)与第1小题步骤相同,略。−t⎛e00⎞⎜⎟At−2t−2t(4)约当型,直接得e=⎜0ete⎟,求状态方程的解略。⎜−2t⎟00e⎝⎠⎛8−2⎞22.A=⎜⎟⎜⎟⎝−4−1⎠s+1−103223.(1)sI−A=0s+1−1=s+3s+6s+34,由代数稳定判据,不稳定。303s+1(2)约当型,特征值为-1、-1和-2,稳定。25.(1)不能控;(2)不能控。26.(1)用能控性判据,能控;(2)对角型,不能控;(3)虽是对角型,但特征值相重,仍用能控性判据,不能控;(4)约当型,不能控;(5)约当型,能控;(6)能控标准型,能控。28.k1=12,k2=−530.(1)不能观;(2)不能观。31.(1)用能观性判据,能观;(2)对角型,不能观;(3)约当型,不能观;(4)用能观性判据,能观;(5)约当型,能观;(6)能观标准型,能观。s+135.G(s)=,分母与分子有公因子,故下面的能控型必不能观:(s+1)(s+2)⎧⎛01⎞⎛0⎞⎪x&=⎜⎜⎟⎟x+⎜⎜⎟⎟u⎨⎝−2−3⎠⎝1⎠⎪()⎩y=11x2s+6s+8(s+2)(s+4)36.G(s)==,分母分子没有公因子,故它的任何动态方程都是2s+4s+3(s+1)(s+3)能控且能观的。38.计算复杂,不要求。48
⎧⎛01⎞⎛0⎞⎪x(n+1)=⎜⎜⎟⎟x(n)+⎜⎜⎟⎟u(n)42.⎨⎝−2−3⎠⎝1⎠⎪()⎩y(n)=32x(n)⎧⎛10.5(e2T−1)⎞⎛0.25(e2T−1)−0.5T⎞⎪x(n+1)=⎜⎟x(n)+⎜⎟u(n)43.⎜0e2T⎟⎜0.5(e2T−1)⎟⎨⎝⎠⎝⎠⎪⎩y(n)=()10x(n)习题101.(1)第1法:原方程已经是多元泰勒级数形式,只要略去高次项就得到线性方程:⎛01⎞s−12x&=⎜⎟x,sI−A==s+s+1,渐近稳定。⎜⎟⎝−1−1⎠1s+122第2法:唯一的平衡状态是原点。取V(x)=x+x,则1222V&(x)=2xx&+2xx&=−2x(1+x)≤0112222⎧x&1=0李氏稳定。在原点附近,设V&(x)≡0,即x2=0,代入原方程:⎨,x1=0,这说明除0=−x⎩1原点外不能持续为零,据定理4,原点是渐近稳定的。⎛−11⎞s+1−12(2)第一法:x&=⎜⎟x,sI−A==s+2s+2,渐近稳定。⎜⎟⎝−1−1⎠1s+122第二法:唯一的平衡状态是原点。取V(x)=x+x,则122222V&(x)=2x1x&1+2x2x&2=2(x1+x2)(x1+x2−1)x2当状态变量很小时负定,故原点是渐近稳定的。α=-0.5α=-1α=-1.54.(1)x2=y&>0:α=0dx−x−x212==αα=1α=-3dxx12−1x=x21α+1xx2=y&<0:1dx−x+x212==αdxxα=-1α=312−1x=x21α−1α=0当α和x同时反号,则x值不变,这说明相轨迹对α=0.5α=1α=1.521称于横轴。故从任一点开始的运动都是周期运动即自振荡。49
(2)见下图。yOtKK(Tω+j)−KTK7.(1)G(jω)===−j2222222−Tω+jω−ω(Tω+1)Tω+1ω(Tω+1)另一方面,有hIm1πAjarcsinπA2−h2πh−=−eA=−−jN(A)4M4M4MORe交点处G(jω)的虚部与负倒描述函数的虚部相等,即πhA→∞−1/N(A)A→h−Kπh1π4M−=−,=224M2400ω(Tω+1)ω(ω+1)3G(jω)ω+ω−127=0,ω≈5rad/s这就是自振荡频率。而负倒描述函数的实部与G(j5)的实部相等,即22πA−hπA−0.0111−=−=2=y(t)4M40−(ω+1)ω=5−261可求得自振荡幅度A。(2)y(t)=1(t)−e(t),故稳态输出大体如图。0t50'
您可能关注的文档
- 《编译原理》西北工业大学第三版课后答案.pdf
- 《网络安全技术》习题与答案.pdf
- 《美学》带答案的思考题及样题.doc
- 《美学原理》-尔雅通识-作业考试题满分答案.docx
- 《美术鉴赏》考试题及答案.docx
- 《美的历程:美学导论》在线课课后作业答案及答题情况.docx
- 《职业伦理与积极心理》考试题库及答案.doc
- 《职业道德与创新能力》考试试题及答案.doc
- 《自动控制原理》+胡寿松+习题答案(附带例题课件).pdf
- 《自动控制原理》张爱民课后习题答案.doc
- 《自动控制原理课》李道根主编哈尔滨工业大学出版社课后答案.pdf
- 《自动控制理论 第2版(夏德钤)》习题答案详解.doc
- 《自动控制理论 第2版》习题参考答案.doc
- 《自动控制理论》第2版_夏德钤翁贻方习题答案.pdf
- 机械工业出版社习题答案_可打印 (2).pdf
- 《自动控制理论》第3版机械工业出版社习题答案_可打印.pdf
- 《自动检测技术》习题集及部分参考答案.doc
- 《自然辩证法概论》课后题答案整理.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明