

- 1.19 MB
- 2022-04-22 11:50:40 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
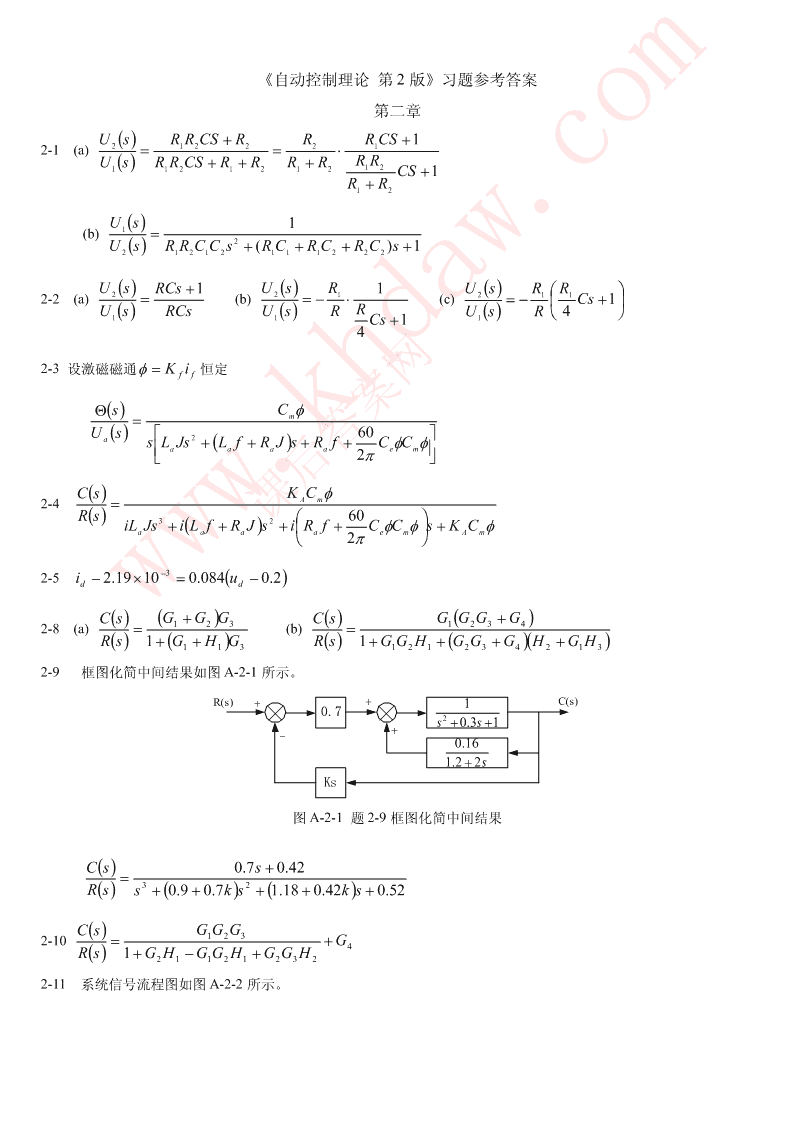
'《自动控制理论第2版》习题参考答案第二章U()sRRCS+RRRCS+12122212-1(a)==⋅U1()sR1R2CS+R1+R2R1+R2R1R2CS+1R+R12U()s11=(b)()2UsRRCCs+(RC+RC+RC)s+121212111222U2()sRCs+1U2()sR11U2(s)R1⎛R1⎞2-2(a)=(b)=−⋅(c)=−⎜Cs+1⎟U1()sRCsU1()sRRCs+1U1()sR⎝4⎠42-3设激磁磁通φ=Ki恒定ffΘ()sCφ=mUa()s⎡2()60⎤sLJs+Lf+RJs+Rf+CφCφ⎢aaaaem⎥⎣2π⎦C()sKCφ=Am2-4R()s3()2⎛60⎞iLJs+iLf+RJs+i⎜Rf+CφCφ⎟s+KCφaaaaemAm⎝2π⎠−32-5i−.219×10=.0084()u−2.0ddC()s()G1+G2G3C()sG1(G2G3+G4)2-8(a)=(b)=R()s1+()G+HGR()s1+GGH+()GG+G(H+GH)1131212342132-9框图化简中间结果如图A-2-1所示。R(s)++1C(s)0.72s+3.0s+1_+.0162.1+2sKs图A-2-1题2-9框图化简中间结果C()s7.0s+.042=()3()2()Rss+9.0+7.0ks+.118+.042ks+.052C()sG1G2G32-10=+G()4Rs1+GH−GGH+GGH211212322-11系统信号流程图如图A-2-2所示。
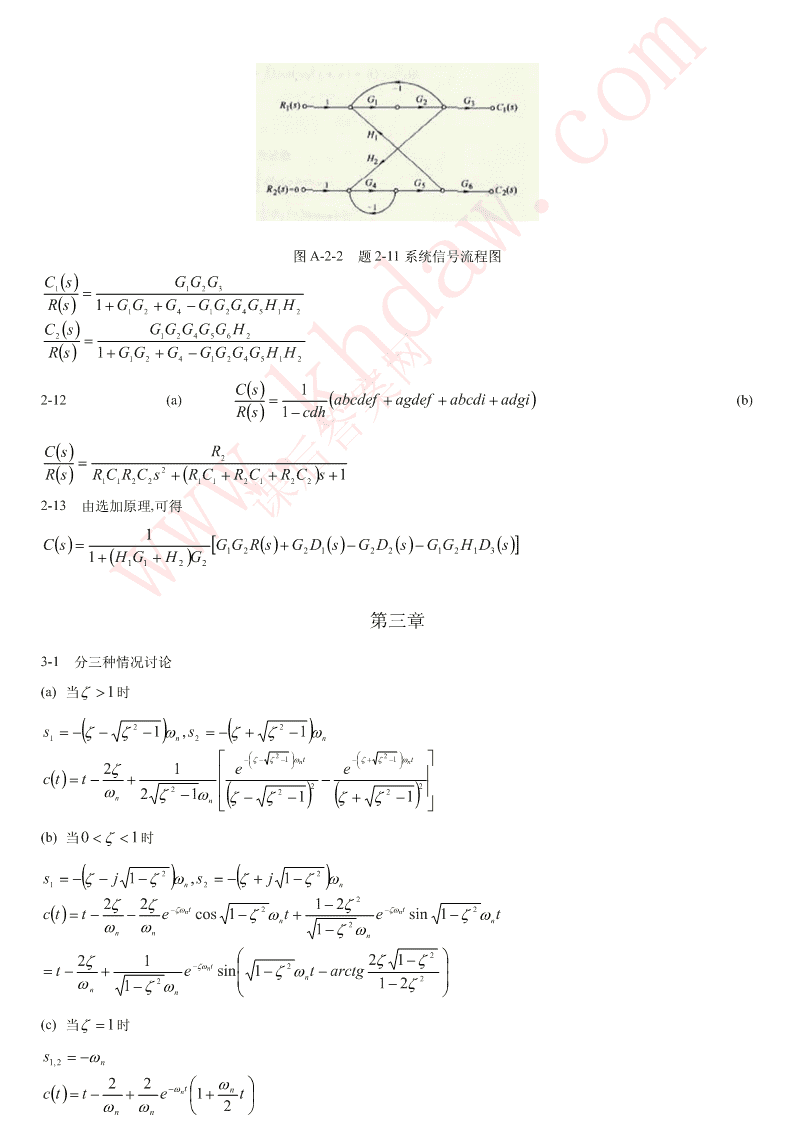
图A-2-2题2-11系统信号流程图C()sGGG1=123R()s1+GG+G−GGGGHH124124512C()sGGGGGH2=124562R()s1+GG+G−GGGGHH124124512C()s12-12(a)=(abcdef+agdef+abcdi+adgi)(b)R()s1−cdhC()sR=2()2()RsRCRCs+RC+RC+RCs+111221121222-13由选加原理,可得1C()s=[]GGR()s+GD()s−GD()s−GGHD()s()12212212131+HG+HG1122第三章3-1分三种情况讨论(a)当ζ>1时(2)(2)s=−ζ−ζ−1ω,s=−ζ+ζ−1ω1n2n−⎛ζ−ζ2−1⎞⎟ωt−⎛ζ+ζ2−1⎞ωt⎡⎜n⎜⎟n⎤2ζ1e⎝⎠e⎝⎠c()t=t−+⎢−⎥222⎢()2()2⎥ωn2ζ−1ωnζ−ζ−1ζ+ζ−1⎣⎦(b)当0<ζ<1时(2)(2)s=−ζ−j1−ζω,s=−ζ+j1−ζω1n2n22ζ2ζ−ζωnt21−2ζ−ζωnt2c()t=t−−ecos1−ζωt+esin1−ζωtnnωω2nn1−ζωn2ζ1⎛2ζ1−ζ2⎞=t−+e−ζωntsin⎜1−ζ2ωt−arctg⎟n22⎜1−2ζ⎟ω1−ζωnn⎝⎠(c)当ζ=1时s=−ω2,1nc()t=t−2+2e−ωnt⎛1+ωnt⎞⎟⎜ωnωn⎝2⎠
设系统为单位反馈系统,有s()s+2ζωE()s=R()()s−cs=R()snr22s+2ζω+ωnn1s(s+2ζω)2ζn系统对单位斜坡输入的稳态误差为e=lims⋅⋅=sr222s→0ss+2ζωs+ωωnnn3-2(1)K=50,K=,0K=0(2)K=∞,K=K,K=0pvapvaKK(3)K=∞,K=∞,K=(4)K=∞,K=,K=0pvapva102003-3首先求系统的给定误差传递函数E(s)1s1.0(s+)1Φ()s===e2R(s)1+G(s)1.0s+s+10误差系数可求得如下s1.0(s+)1C=limΦ()s=lim=00s→0es→021.0s+s+10d102.0(s+)1C=limΦ()s=lim=1.01s→0dses→01.0(s2+s+10)2222d1.0(2s+s+10)−202.0(s+)1C=limΦ()s=lim=02s→0ds2es→01.0(s2+s+10)3(1)rt)(=R,此时有rt)(=R,r&t)(=r&&t)(=0,于是稳态误差级数为0s0sse(t)=Crt)(=0,t≥0sr0s(2)rt)(=R+Rt,此时有r(t)=R+Rt,r&(t)=R,r&&(t)=0,于是稳态误差级数为01s01s1se()t=Crt)(+Cr&(t)=1.0R,t≥0sr0s1s11212(3)r(t)=R+Rt+Rt,此时有r(t)=R+Rt+Rt,r&(t)=R+Rt,r&&t)(=R,于是稳态误差级数012s012s12s222为Ce()t=Crt)(+Cr&(t)+2r&&(t)=(1.0R+Rt),t≥0sr0s1ss12!23-4首先求系统的给定误差传递函数E(s)1s1.0(s+)1Φ()s===e2R(s)1+G(s)1.0s+s+500误差系数可求得如下
s1.0(s+)1C=limΦ()s=lim=00s→0es→01.0s2+s+500d5002.0(s+)11C=limΦ()s=lim=1s→0dses→01.0(s2+s+500)2500222d1001.0(s+s+500)−10002.0(s+)198C=limΦ()s=lim=2s→0ds2es→01.0(s2+s+500)35002LLrt)(=sin5tsr&t)(=5cos5tsr&&t)(=−25sin5ts稳态误差级数为()⎡C2⎤[]et=C−×25+Lsin5t+C×5−Lcos5tsr⎢0⎥1⎣2⎦[]−4[2]=9.4×10+Lsin5t+1×10−Lcos5t2ζ3-6系统在单位斜坡输入下的稳态误差为e=srωn加入比例—微分环节后C()s=[]R()(s1+as)−C(s)G(s)()2()1+asG(s)1+asωC()s=R()s=nR()s()221+Gss+2ζωs+ωnn2()s+2ζ−aωωsnnE()s=R()s−C()s=R()s22s+2ζωs+ωnn1R()s=2s2ζ−aωe=limsE()s=nsrs→0ωn2ζ可见取a=,可使e=0srωn3-7ζ=.0598,ω=19.588n43-8G()s=()2ss+4s+63-9按照条件(2)可写出系统的特征方程2(s+1−j)(s+1+j)(s+a)=(s+2s+2)(s+a)32=s+2(+a)s+2(+2a)s+2a=0将上式与1+G(s)=0比较,可得系统的开环传递函数2aG(s)=[]2ss+2(+a)s+2(+2a)
根据条件(1),可得12aK==5.0=ve2+2asr解得a=1,于是由系统的开环传递函数为2G(s)=[]2ss+3s+4()1M=466.%,t=.799s(2%),(ω=.212rad/s,ζ=.024)psn3-10()2M=163.%,t=8s()2%,(ω=1rad/s,ζ=)5.0psn()3t=15s,(ω=4.0rad/s,ζ=.125),过阻尼系统,无超调。sn3-11(1)当a=0时,ζ=.0354,ω=22。n(2)ω不变,要求ζ=7.0,求得a=0.25n3-121.单位脉冲响应(a)无零点时ωn−ζωnt2c()t=esin1−ζωt,()t≥0n21−ζ(b)有零点z=−1时2⎛2⎞1−2ζω+ω⋅ω1−ζωc()t=nnne−ζωntsin⎜1−ζ2ωt+arctgn⎟,()t≥0n2⎜1−ζω⎟1−ζ⎝n⎠比较上述两种情况,可见有z=−1零点时,单位脉冲响应的振幅较无零点时小,而且产生相移,相移角为21−ζωnarctg。1−ζωn2.单位阶跃响应(a)无零点时1⎛1−ζ2⎞c()t=1−e−ζωntsin⎜1−ζ2ωt+arctg⎟,()t≥0n2⎜ζ⎟1−ζ⎝⎠(b)有零点z=−1时2⎛2⎞1−2ζω+ω1−ζc()t=1+nne−ζωntsin⎜1−ζ2ωt−arctg⎟,()t≥0n2⎜ω−ζ⎟1−ζ⎝n⎠加了z=−1的零点之后,超调量M和超调时间t都小于没有零点的情况。ppK()τs+1113-13系统中存在比例-积分环节,当误差信号e(t)=0时,由于积分作用,该环节的输出保持不变,故系s统输出继续增长,知道出现e()t<0时,比例-积分环节的输出才出现减小的趋势。因此,系统的响应必然存在超调现象。3-14在r()t为常量的情况下,考虑扰动n()t对系统的影响,可将框图重画如下
N(s)+KC(s)K2()2_s()τ2s+1sτs+12KK(τ(τss++11))1111ss图A-3-2题3-14系统框图等效变换Ks()2()Cs=Ns2()()sτs+1+KKτs+121211根据终值定理,可求得n()t为单位阶跃函数时,系统的稳态误差为0,n(t)为单位斜坡函数时,系统的稳态误差为。K1从系统的物理作用上看,因为在反馈回路中有一个积分环节,所以系统对阶跃函数的扰动稳态误差为零。在反馈回路中的积分环节,当输出为常量时,可以在反馈端产生一个与时间成正比的信号以和扰动信号平衡,就使斜坡函数的扰动输入时,系统扰动稳态误差与时间无关。3-15(1)系统稳定。(2)劳斯阵列第一列符号改变两次,根据劳斯判据,系统有两个极点具有正实部,系统不稳定。(3)劳斯阵列第一列符号改变两次,根据劳斯判据,系统不稳定。42(4)系统处于稳定的临界状态,由辅助方程A(s)=2s+6s+4可求得系统的两对共轭虚数极点s=±j;s=±j2。须指出,临界稳定的系统在实际中是无法使用的。2,14,33-16(1)K>0时,系统稳定。(2)K>0时,系统不稳定。(3)00τ+2由此得到τ和K应满足的不等式和条件(2K+)10<τ<,K>,1τ≠2K−1K234591530100τ643.332.52.282.132.04根据列表数据可绘制K为横坐标、τ为纵坐标的曲线,闭环系统稳定的参数区域为图A-3-3中的阴影部分。图A-3-3闭环系统稳定的参数区域3-18根据单位反馈系统的开环传递函数K(s+)3G()s=2s(s+2s+)232得到特征方程s+2s+(K+)2s+3K=0,列写劳斯表
3s12+K2s23K1s4−K0sK根据劳斯判据可得系统稳定的K值范围00便有二个闭环极点位于右半平s1面。所以无论K取何值,系统都不稳定。图A-4-4题4-3系统常规根轨迹K()s+11(2)G()s=2()ss+2分离点为(,0j0);常规根轨迹如图A-4-4(b)所示。从根轨迹图看,加了零点z=−1后,无论K取何值,系统都是稳定的。4-7系统特征方程为2()s+1+αs+1=0以α为可变参数,可将特征方程改写为αs1+=02s+s+1
从而得到等效开环传递函数αsG(s)=eq2s+s+1°根据绘制常规根轨迹的方法,可求得分离点为(−,1j0),出射角为ϕ=m150。参数根轨迹如图A-4-8所示。P图A-4-8题4-7系统参数根轨迹(1)无局部反馈时(α=0),单位速度输入信号作用下的稳态误差为e=1;阻尼比为ζ=5.0;调节时间为srt=6s()5%s(2)α=2.0时,e=2.1,ζ=6.0,t=5s5(%)srs比较可见,当加入局部反馈之后,阻尼比变大,调节时间减小,但稳态误差加大。(3)当α=1时,系统处于临界阻尼状态,此时系统有二重闭环极点s=−1。2,14-9主根轨迹如图A-4-9所示。系统稳定的K值范围是0时,没有分离点。系统的根轨迹族如图999A-4-15所示。
图A-4-15题4-13系统的根轨迹族第五章15-1(1)G()s=s()s+11G()jω=2ω1+ω()0∠Gjω=−90−arctgωω0.51.01.52.05.010.0G()jω1.790.7070.370.2240.0390.0095∠G()jω-116.6°°°°°°-135-146.3-153.4-168.7-174.2系统的极坐标图如图A-5-1所示。图A-5-1题5-1系统(1)极坐标图1(2)G()s=()1+s(1+2s)
1G()jω=221+ω1+4ω∠G()jω=−arctgω−arctg2ωω00.20.50.81.02.05.0G()jω10.910.630.4140.3170.1720.0195∠G()jω0°°°°°°°-15.6-71.6-96.7-108.4-139.4-162.96系统的极坐标图如图A-5-2所示。图A-5-2题5-1系统(2)极坐标图1(3)G()s=s()s+1(2s+1)1G()jω=22ω1+ω1+4ω()0∠Gjω=−90−arctgω−arctg2ωω0.20.30.5125G()jω4.552.741.270.3170.0540.0039∠G()jω-105.6°°°°°°-137.6-161-198.4-229.4-253系统的极坐标图如图A-5-3所示。图A-5-3题5-1系统(3)极坐标图
1(4)G()s=2()()s1+s1+2s1G()jω=222ω1+ω1+4ω()0∠Gjω=−180−arctgω−arctg2ωω0.20.250.30.50.60.81G()jω22.7513.87.862.520.530.650.317∠G()jω-195.6°°°°°°°-220.6-227.6-251.6-261.6-276.7-288.4系统的极坐标图如图A-5-4所示。图A-5-4题5-1系统(4)极坐标图15-2(1)G()s=()jω(1+jω)系统的伯德图如图A-5-5所示。图A-5-5题5-2系统(1)伯德图1(2)G()s=()1+jω(1+j2ω)系统的伯德图如图A-5-6所示。
图A-5-6题5-2系统(2)伯德图1(3)G()s=jω()1+jω(1+j2ω)系统的伯德图如图A-5-7所示。图A-5-7题5-2系统(3)伯德图1(4)G()s=()(2)()jω1+jω1+j2ω系统的伯德图如图A-5-8所示。
图A-5-8题5-2系统(4)伯德图15-3G()s=s()1.0s+1(5.0s+1)1G()jω=22ω1+1.0(ω)1+5.0(ω)()0∠Gjω=−90−arctg1.0ω−arctg5.0ωω0.51.01.52.03.05.010.0G()jω17.38.95.33.51.770.670.24∠G()jω-106.89°°°°°°°-122.3-135.4-146.3-163-184.76-213.7系统的极坐标图如图A-5-9所示。图A-5-9题5-3系统极坐标图系统的伯德图如图A-5-10所示。
图A-5-10题5-3系统伯德图相角裕度γ≈7.0°,增益裕量GM=.355dB15-4(1)G()jω=,此为非最小相位环节,其幅频、相频特性表达式为jω−11G()jω=21+ω()0∠Gjω=−180+arctgω该环节的伯德图如图A-5-11所示。图A-5-11题5-4伯德图1(2)惯性环节G()jω=是最小相位的,其幅频、相频特性表达式为jω+11G()jω=21+ω∠G()jω=−arctgω该环节的伯德图如图A-5-11点划线所示。由图可见,两个环节具有相同的幅频特性,相频特性有根本区别。105-7(a)G()s=,系统的相频特性曲线如图A-5-12所示。5.0s+1
10图A-5-12题5-7G()s=相频特性曲线5.0s+1.392(b)G()s=,系统的相频特性曲线如图A-5-13所示。s()5.0s+1.392图A-5-13题5-7G()s=相频特性曲线s()5.0s+15.0()2s+1(c)G()s=,系统的相频特性曲线如图A-5-14所示。2()s5.0s+15.0(2s+1)图A-5-14题5-7G()s=相频特性曲线2()s5.0s+15-8(a)闭环系统不稳定。(b)闭环系统稳定。(c)闭环系统稳定。(d)闭环系统稳定。−τs2e5-9G()s=s()1+s(1+5.0s)τ=0时,经误差修正后的伯德图如图A-5-15所示。从伯德图可见系统的剪切频率ω=.115rad/s,在剪切频c率处系统的相角为ooϕ(ω)=−90−arctgω−arctg5.0ω=−1689.ccco由上式,滞后环节在剪切频处最大率可有111.的相角滞后,即o180oτ=111.π解得τ=.01686s。因此使系统稳定的最大τ值范围为0≤τ<.01686s。
图A-5-15题5-9系统伯德图K15-10由G()()sHs=知两个转折频率ω=rad/s,ω=1rad/s。令K=1,可绘制系统伯德图如()()12s1+s1+3s3图A-5-16所示。图A-5-16题5-10系统伯德图o确定ϕ(ω)=−180所对应的角频率ω。由相频特性表达式gooϕ(ω)=−90−arctg.033ω−arctgω=−180ggg.133ωgo可得arctg=9021−.033ωg解出ω=3=.1732rad/sg在图A-5-16中找到L(ω)=−5.2dB,也即对数幅频特性提高5.2dB,系统将处于稳定的临界状态。因此g
420lgK=5.2dB⇒K=为闭环系统稳定的临界增益值。35-11由L)1.0(=0dB知K=1;1由L)1(=−3dB知ω=1是惯性环节由的转折频率;s+1ω从1增大到10,L(ω)下降约23dB,可确定斜率为−20dB/dec,知系统无其他惯性环节、或微分环节和振荡环节。−τsoo−τse由ϕ)1.0(=0和ϕ)1(=−83知系统有一串联纯滞后环节e。系统的开环传递函数为G()()sHs=()s+1o−.066s180oe由ϕ)1(=arctg1−×τ=−83解得τ=.066s。可确定系统的传递函数为G()()sHs=π()s+11.0K5-12系统的开环传递函数为G()()sHs=()2s1.0s+s+.0001系统稳定的增益范围021,o()csss+1s+7.5°γ=62(ω=.302rad/s),满足设计要求。cK6-8G()s=s()s+1(2.0s+1)校正之前γ=−6.9°,取θ=−128°处的ω=.0602rad为新的剪切频率,该处增益为211.db,故取β=113.,s.667s+1ω2=.015rad/s则ω1=.0013rad/s,滞后校正装置传递函数为Gc()s=,校正后系统开环传递函数为769.s+18(.667s+1)G()s=,s()s+1(2.0s+1)(769.s+1)°γ≈40(ω=.0602rad/s),满足要求。系统校正前、后伯德图如图A-6-6所示。c图A-6-6题6-8系统校正前、后伯德图°°6-9未采用反馈校正时,γ=179.,带宽为.4826rad/s。采用反馈校正后,调整K=5.2,使K=10,此时γ=27。A带宽为.7426rad/s。可见,采用反馈校正,可提高系统的稳定裕度,并可使带宽增大。系统反馈校正前、后伯德图
如图A-6-7所示。图A-6-7题6-9系统反馈校正前、后伯德图第七章⎧y()t=KXsinωt,0<ωt<α0⎪7-1(a)⎨y()t=K0Xsinωt−K1a+K0a,α<ωt<π−α⎪y()t=KXsinωt,π−α<ωt<π⎩0a其中α=arcsinX2()−⎡2⎤K0K1aa⎛a⎞N()X=K1+⎢arcsin+1−⎜⎟⎥,X>aπ⎢XX⎝X⎠⎥⎣⎦⎧y()t=,00<ωt<α⎪(b)⎨y()t=K0Xsinωt,α<ωt<π−α⎪⎩y()t=,0π−α<ωt<πa其中α=arcsinX2⎛πa⎞2K0a⎛a⎞N()X=K0⎜1−arcsin⎟+1−⎜⎟,X>a⎝2X⎠πX⎝X⎠17-3K=1.0时绘制的系统线性部分的极坐标图和非线性环节的负倒幅特性如图A-7-1所示,G()jω与−无N()X交点,故系统稳定。
图A-7-1题7-3系统的稳定性分析令∠G(jω)=-180°,可求得ω=7.8rad,将ω=7.8rad代入G(jω)=1,可得K=11.53,当K<11.53时,ss系统不会产生自持振荡。24⎛1.0⎞17-4N()X=1−⎜⎟,系统线性部分的极坐标图和非线性环节的负倒幅特性如图A-7-2所示,其中−πX⎝X⎠N()Xπ是实轴上从−到−∞的直线。2图A-7-2题7-4系统的稳定性分析1G()jω与−有交点,系统将出现自持振荡,振荡频率为4.1rads,振幅为1.7。N()X7-6令x=e,x=e&得122x=−2ξωx−ωx2n2n1dx3.0x+x121α==−dxx22即有−x1x=23.0+α用等倾线法绘制的相轨迹如图A-7-3所示,奇点为稳定焦点。
图A-7-3题7-6系统的相平面图7-8以下结果可和仿真结果比较。⎡22⎤2⎛2.0⎞⎛1.0⎞2.0N()X=⎢1−⎜⎟+1−⎜⎟⎥−j,X>2.02πX⎢⎝X⎠⎝X⎠⎥πX⎣⎦M=,1a=,2.0m=5.0y=c&&+c&,e=−c⎧,1e&>,0e>2.0或e&<,0e>1.0⎪y=φ(e)=⎨,0e&>,0−1.0,0e<1.0或e&<,0e<−2.0相平面分为三个区:I区e&&+e&=0⇒α=−1−1II区e&&+e&+1=0⇒e&=α+11III区e&&+e&−1=0⇒e&=α+1用等倾线法绘制的相轨迹如图A-7-4所示。图A-7-4题7-8系统相平面图
根据图A-7-4,系统有一个稳定的极限环,且自持振荡的振幅为0.2。进一步可用谐波平衡法确定自持振荡的频1率。由图A-7-5中G()jω与−的交点可确定自持振荡的频率为7.1rads。N()X图A-7-5题7-8系统极坐标图和负倒幅特性7-9y=5.0c&&+c&,e=−c⎧−,4e<−5.0⎪y=φ(e)=⎨8e,−5.05.0相平面分为三个区:8I区5.0e&&+e&−4=0⇒e&=α+2−16eII区5.0e&&+e&+8e=0⇒e&=α+2−8III区5.0e&&+e&+4=0⇒e&=α+2用等倾线法绘制的相轨迹如图A-7-6所示。图A-7-6题7-9系统相平面图根据系统的相轨迹,可知系统奇点的类型是稳定焦点,系统响应是衰减振荡的。
7-10对题7-9系统加入微分负反馈后,令非线性环节的输入变量为E,输出变量为y。E=e−Kc&=e+Ke&tt⎧−,4e<−5.0⎪y=φ(E)=⎨8E=(8e+Kte&,)−5.05.0相平面分为三个区:8I区5.0e&&+e&−4=0⇒e&=α+2−16eII区5.0e&&+1(+8K)e&+8e=0⇒e&=tα+2+16Kt−8III区5.0e&&+e&+4=0⇒e&=α+2取K=5.0,用等倾线法绘制的相轨迹如图A-7-7所示。t图A-7-7题7-10系统相平面图与未加速度反馈的情形比较,系统将在较短的时间内到达平衡点(调整时间短),奇点为稳定节点,其响应具有单调衰减的性质。7-13系统的各变量名如图A-7-8所示。
图A-7-8题7-13系统框图及变量名2(1)G()s=,e()0=,5.3e&()0=0se=−c,e=Ke−y11⎧,1e&<0y=φ()c&=φ()e&=⎨⎩−,1e&>02e=c&&=−e&&1e&&+2()e−y=0⎧2+2ee&&+2e+2=,0e&>0⇒e&=−⎪α⎨2e−2⎪e&&+2e−2=,0e&<0⇒e&=−⎩α用等倾线法绘制的相轨迹如图A-7-9所示。图A-7-9题7-13系统(1)的相平面图2(2)G()s=(K=,2T=1),e()0=,5.3e&()0=0。2s+1e=−c,e=e−y12e=c&&+c&=−e&&−e&1e&&+e&+2e−2y=0⎧−2−2ee&&+e&+2e+2=,0e&>0⇒e&=⎪1+α⎨2−2e⎪e&&+e&+2e−2=,0e&<0⇒e&=⎩1+α用等倾线法绘制的相轨迹如图A-7-10所示。
图A-7-10题7-13系统(2)的相平面图第八章()−aT−atz1−e8-1(1)f()t=1−e,F()z=()()−atz−1z−etzft=aT(2)(),F()z=z−aaTatTze(3)f()t=te,F()z=()−aT2z−e2()2Tz1+z(4)f()t=t,F()z=()3z−1−at−atzesinωT(5)f()t=esinωt,F()z=2−aT−2aTz−2zecosωT+e()−aTsz1−e8-2(1)F()s=,F()z=()−aTss+a()z−1()z−e2()ωT−ωTωze−e(2)F()s=,F()z=22[]2()ωT−ωTs−ω2z−ze+e+1[()−aT()−aT]1zzaT−1+e+1−aT+1e(3)F()s=,F()z=2()22−aTss+aa()z−1()z−e()−T−2Ts+3zz+e−2e(4)F()s=,F()z=()()2−T−2T−3Ts+1s+2z−()e+ez+ez−1−t8-3(1)F()z=,Z[]F()z=aTz+a
2z−1−.0695tT(2)F()z=,Z[F()z]=te()22z−1zt(3)F()z=,Z−1[]F()z=−1()t+2T()z−1(z−2)()−aTz1−e−1−at(4)F()z=,Z[]F()z=1(t)−e()(−aT)z−1z−eRG()zG(z)RG1()()zG2z8-4(a)C()z=(b)C()z=R()z(c)C()z=1+GH()z1+G()()zHz1+GGH()z12−TK1(−e)z8-5系统的开环脉冲传递函数G()z=;()−Tzz−e()−TC(z)GzK1(−e)z闭环脉冲传递函数==;()−TR(z)1+Gzz+(K−1−Ke)−T−T差分方程c(k+)1+(K−1−Ke)c(k)=K1(−e)r(k)Kz8-6(1)G()z=−Tz−e−T1+G()z=z−e+Kz=0w+1令z=,T=1sw−1()K+.0632w+()K+.1368=0可得系统稳定的条件K>0。Kz(2)G()z=,采样系统的根轨迹如图A-8-1所示。z−.0368图A-8-1题8-6采样系统根轨迹.0632K8-7G()z=z−.0368特征方程为z−.0368+.0632K=0w+1令z=w−1.0632()(1+Kw+.1368−.0632K)=0
根据劳斯判据,要使系统稳定,应有K<.2165。所以采样系统的临界稳定的K值为2.165。K⎡⎛−T⎞⎛−T−T⎞⎤8-10G()z=T−T+TeT1⎟z−TeT1+TeT1−T−T⎢⎜11⎜11⎟⎥()z1⎛zeT1⎞⎣⎝⎠⎝⎠⎦−⎜−⎟⎝⎠K=lim[]1+G()z=∞pz→1K=lim()z−1G(z)=KTvz→11T1e=+=srKKKpv1采样系统在输入r(t)=(1t)+t时的稳态误差终值为。KK().0368z+.02648-12系统的开环脉冲传递函数G()z=;()z−1(z−.0368)实轴上的根轨迹[].0368,,1(−∞,−.0717];分离点s=.065,−.208;2,1和虚轴交点±j.116(K=.372);采样系统的根轨迹如图A-8-2所示。图A-8-2采样系统根轨迹−sT1−eK8-13G()s=⋅ss()τs+11K(.0005z+.00045)G()z=()z−1(z−.0905)1+w由K=1,可求得K=10,将z=,K=10代入,得v1−w5.0(1−w)(1+.0053w)G()w=w()1+20.05w
采样系统w域的伯德图如图A-8-3所示。剪切频率为ω=.0132rad,相角裕量为13.6°。cs图A-8-3采样系统w域伯德图°选用相位超前校正,取ϕ=45,则α=.0172m取幅值为−10lg⎛⎜1⎞⎟=−.764db处的频率ω=.023rad为新的剪切频率。校正装置传函为⎝.0172⎠s1+13.71wD()w=1+8.1w校正后,系统的相角裕量为γ=499.°>45°z−1将w=代入D()w,可得校正装置的脉冲传递函数z+1−11−.0864zD()z=.524−11−.0286z第九章9-1解R(τ)=E[X(t)X(t+τ)]1T=Tlim→∞∫−TX(t)X(t+τ)dt2T1T=Tlim→∞∫−TAsin(ωt+ϕ)Asin[ω(t+τ)+ϕ]dt2T2AT=Tlim→∞∫−T[cos(2ωt+2ϕ+ωτ)+cosωτ]dt4T2TA⎡1⎤=limsin(2ωt+2ϕ+ωτ)+tcosωτT→∞4T⎢⎣2ω⎥⎦−T2A=cosωτ2
∞−jω1τΦ(ω1)=∫−∞R(τ)edτ2∞A−jωτ=∫cosωτ⋅e1dτ−∞22∞A=cosωτ(cosωτ+jsinωτ)dτ∫11−∞22∞A=2cosωτ⋅cosωτdτ∫1022A∞=[cos(ω−ω)τ−cos(ω+ω)τ]dτ∫11202Aπ=[δ(ω−ω)+δ(ω−ω)]112E(s)1s(Ts+)19-2解给定误差传递函数===Φ(s)eR(s)KKs(Ts+)1+KK1+1⋅212Ts+1sK2C(s)sK2(Ts+)1扰动误差传递函数===Φ(s)nN(s)1+K1⋅K2s(Ts+)1+K1K2Ts+1s∞−jωτ给定控制随机信号的谱密度Φ(ω)=∫R(τ)edτr−∞r∞2−μτ||−jωτ=∫aeedτ−∞∞2−μτ||=2∫aecosωτdτ02222μa2μa2===Φ(ω)22r1ω+μjω+μ∞2−jωτ222扰动随机信号的谱密度Φ(ω)=∫Kδ(τ)edτ=K=K=Φ(ω)n−∞NNNn1222系统的均方误差e=e+ern1∞2∞2=[|Φ(jω)Φ(ω|)dω+|Φ(jω)Φ(ω|)dω]∫∫−∞er1−∞nn12π221∞jω(jωT+)12μa=∫−∞⋅dω2πjω(jωT+)1+KKjω+μ1221∞K2(jωT+)1+⋅Kdω∫−∞N2πjω(jωT+)1+KK12
2s=jω1T2μa2s2+2μa2sj∞==∫ds−j∞322πjTs+(μT+)1s+(μ+KK)s+μKK121221j∞K2KNTs+K2KN+ds2πj∫−j∞Ts2+s+KK1222222222Tμa+TμaKK+μaKKKT+KK1212N2N=+2Tμ+μ+K1K22K1TE(s)1s9-3解给定误差传递函数Φ(s)===eR(s)1+G(s)s+KC(s)G(s)K扰动误差传递函数Φ(s)===nN(s)1+G(s)s+K2422Φ(ω)===Φ(ω)r2r1ω+4jω+228222Φ(ω)===Φ(ω)n2n1ω+16jω+421∞2∞2e=[|Φ(jω)Φ(ω|)dω+|Φ(jω)Φ(ω|)dω]∫∫−∞er1−∞nn12π221∞jω21∞K22=∫∫−∞⋅dω+−∞⋅dω2πjω+Kjω+22πjω+Kjω+422s=jω12s122Kj∞j∞==∫∫−j∞2ds+−j∞2ds2πjs+(K+)2s+2K2πjs+(K+)4s+4K2K=+K+2K+42上式对K求一阶导数并令其等于零解得,当K=22时,e有最小值。9-4解输入到输出的传递函数为C(s)1=2R(s)RRCCs+(RC+RC+RC)s+1121212112222cd+cd1k−1kkk−2I=I==22ddd(2RC+RC+RC)kk−1k−2121122等效带宽为πω=πI=bN(2RC+RC+RC)121122'
您可能关注的文档
- 《职业伦理与积极心理》考试题库及答案.doc
- 《职业道德与创新能力》考试试题及答案.doc
- 《自动控制原理》+胡寿松+习题答案(附带例题课件).pdf
- 《自动控制原理》习题及答案.pdf
- 《自动控制原理》张爱民课后习题答案.doc
- 《自动控制原理课》李道根主编哈尔滨工业大学出版社课后答案.pdf
- 《自动控制理论 第2版(夏德钤)》习题答案详解.doc
- 《自动控制理论 第2版》习题参考答案.doc
- 《自动控制理论》第2版_夏德钤翁贻方习题答案.pdf
- 《自动控制理论》第3版机械工业出版社习题答案_可打印.pdf
- 《自动检测技术》习题集及部分参考答案.doc
- 《自然辩证法概论》课后题答案整理.doc
- 《船舶电气设备及系统》郑华耀主编_课后习题参考答案.doc
- 《船舶管理》题库--带答案.doc
- 《英美概况》试题(附答案).doc
- 《英译汉教程》 练习参考答案.doc
- 英译汉教程》____练习参考答案.doc
- 《英译汉教程》练习参考答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明