

- 371.17 KB
- 2022-04-22 11:26:21 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'课后答案网:www.hackshp.cn课后答案网您最真诚的朋友www.hackshp.cn网团队竭诚为学生服务,免费提供各门课后答案,不用积分,甚至不用注册,旨在为广大学生提供自主学习的平台!课后答案网:www.hackshp.cn视频教程网:www.efanjy.comPPT课件网:www.ppthouse.com课后答案网www.hackshp.cn若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
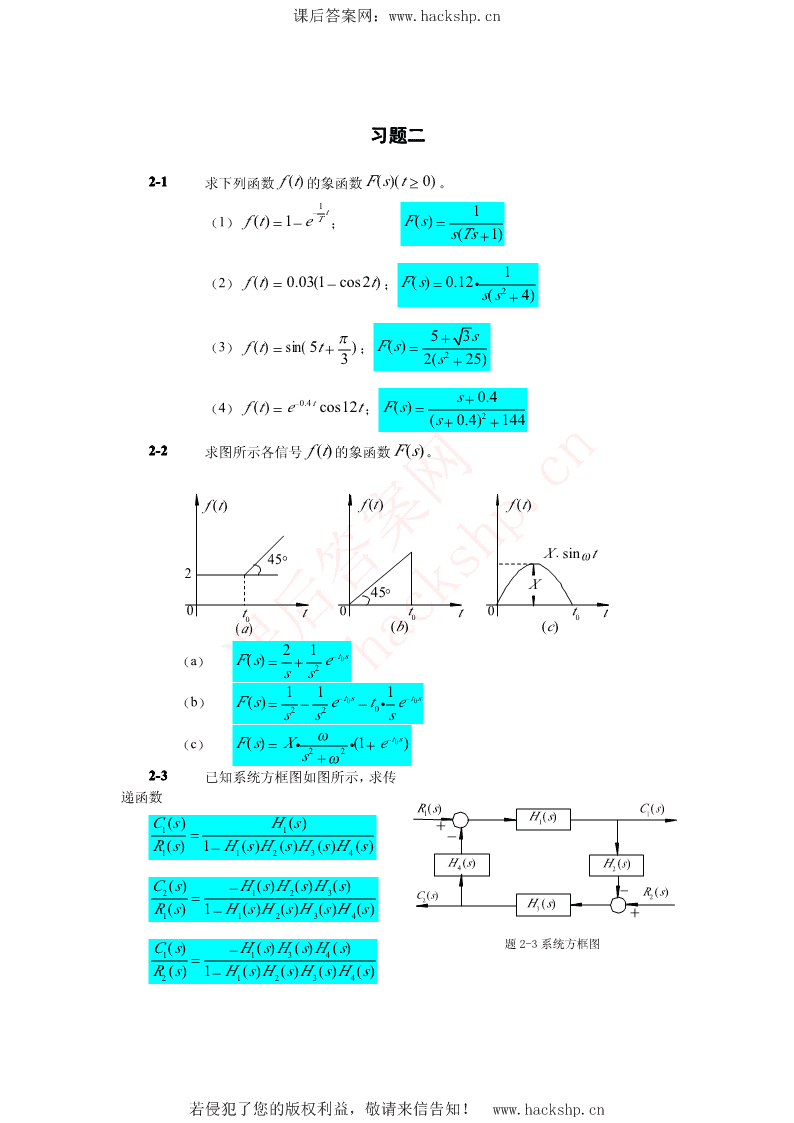
课后答案网:www.hackshp.cn习题二2-12-1求下列函数f(t)的象函数F(s)(t≥0)。1−t1(1)ft()1=−eT;Fs()=sTs(+1)1(2)f(t)=.003(1−cos2t);Fs()=0.12i2ss(+4)π5+3s(3)f(t)=sin(5t+);Fs()=232(s+25)−0.4ts+0.4(4)f(t)=ecos12t;Fs()=2(s+0.4)+1442-2求图所示各信号ft)(的象函数Fs()。ft)(ft)(ft)(X⋅sinωt45°2X45°0t0t0t0t0t0t(a)(b)(c)21−ts0(a)Fs()=+e2ss(b)课后答案网Fs()=1−1e−ts0−ti1e−ts0220sssω−ts0(c)Fs()=Xii(1+e)22www.hackshp.cns+ω2-3已知系统方框图如图所示,求传递函数R1(s)C1(s)H(s)Cs()Hs()+111=−Rs()1−HsHsHsHs()()()()11234H4(s)H2(s)Cs2()−HsHsHs1()2()3()()−R(s)=C2s2H(s)Rs()1−HsHsHsHs()()()()3+11234题2-3系统方框图Cs()−HsHsHs()()()1134=Rs()1−HsHsHsHs()()()()21234若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
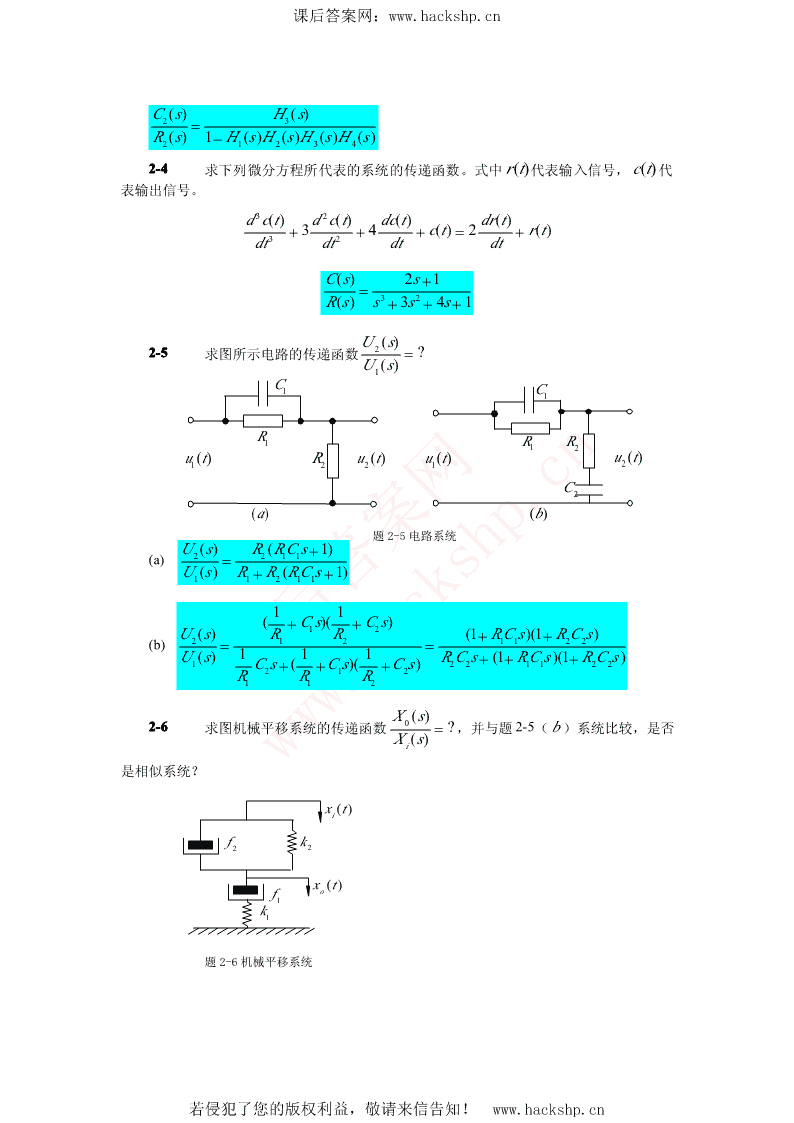
课后答案网:www.hackshp.cnCs()Hs()23=Rs()1−HsHsHsHs()()()()212342-4求下列微分方程所代表的系统的传递函数。式中rt)(代表输入信号,ct)(代表输出信号。32dc(t)dc(t)dc(t)dr(t)+3+4+c(t)=2+r(t)32dtdtdtdtCs()2s+1=32Rs()s+3s+4s+1U(s)22-5求图所示电路的传递函数=?U(s)1C1C1R1R1R2u1(t)R2u2(t)u1(t)u2(t)C2(a)(b)题2-5电路系统Us()RRCs(+1)2211(a)=Us()R+RRCs(+1)1121111(+Cs)(+Cs)12Us()RR(1+RCs)(1+RCs)2121122(b)==Us()111RCs+(1+RCs)(1+RCs)1Cs+(+Cs)(+Cs)221122212RRR课后答案网112X(s)02-6求图机械平移系统的传递函数=?,并与题2-5(b)系统比较,是否X(s)www.hackshp.cni是相似系统?xt()if2k2xt()of1k1题2-6机械平移系统若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cnXs()(K+fsK)(+fs)o1122=Xs()Kfs+(K+fsK)(+fs)i111122此机械系统与题2-5(b)系统是相似系统2-72-7为什么两个惯性环节串联不可能成为振荡环节?构成振荡环节的必要条件是什么?2-82-8若系统的方框图如图所示,求:Fs()R(s)ε(s)Bs()+C(s)+G1(s)+G2(s)−Y(s)H(s)题2-8控制系统(1)以R(s)为输入,而分别以C(s)、Y(s)、B(s)、ε(s)为输出的闭环传递函数。Cs()GsGs()()Ys()GsGsHs()()()1212==Rs()1+GsGsHs()()()Rs()1+GsGsHs()()()1212Bs()Gs()ε()s11==Rs()1+GsGsHs()()()Rs()1+GsGsHs()()()1212(2)以F(s)为输入,而分别以C(s)、Y(s)、B(s)、ε(s)为输出的闭环传递函数。Cs()Gs()Ys()GsHs()()22==Fs()1+GsGsHs()()()Fs()1+GsGsHs()()()1212Bs()−GsGsHs()()()ε()s−GsHs()()122==Fs()1+GsGsHs()()()Fs()1+GsGsHs()()()课后答案网1212C(s)ε(s)2-9试求取图2-40所示系统的传递函数及。www.hackshp.cnR(s)R(s)H(s)4R(s)ε(s)−C(s)G(s)G(s)G3(s)G(s)+1+2+4−−H(s)3+H2(s)−H(s)1题2-9系统方框图若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cnCs()GGGG1234=Rs()1+GGH+GGH+GGGH−GGGGH233344123212341ε()s1+GGH+GGH233344=Rs()1+GGH+GGH+GGGH−GGGGH233344123212341C(s)ε(s)2-10简化图2-41所示三个系统的方框图,并求出和。R(s)R(s)F(s)+R(s)ε(s)C(s)G1(s)G2(s)++−−G(s)G(s)34(a)Cs()GsGs()()12=Rs()1+GsGs()()+GsGs()()1324ε()s1+GsGs()()24=Rs()1+GsGs()()+GsGs()()1324G(s)4R(s)ε(s)+C(s)G1(s)G2(s)++课后答案网−G(s)www.hackshp.cn3(b)Cs()GsGs()()+GsGs()()1224=Rs()1+GsGsGs()()()123ε()s1−GsGsGs()()()234=Rs()1+GsGsGs()()()123F(s)+R(s)ε(s)++C(s)G1(s)G2(s)G3(s)−−G(s)4(c)若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cnCs()GsGsGs()()()123=Rs()1+GsGs()()+GsGsGs()()()24123ε()s1+GsGs()()24=Rs()1+GsGs()()+GsGsGs()()()24123C(s)2-11简化所示系统的方框图,并求传递函数。R(s)−R(s)C(s)G(1s)G(s)+2++−R(s)C(s)+−−++G2(s)G1(s)++Cs()Gs()(1−Gs())21(a)=Rs()1−Gs()+GsGs()()112Cs()2GsGs()()+Gs()−Gs()(b)1221=Rs()13()+GsGs()+Gs()−Gs()1221课后答案网www.hackshp.cn若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn习题三3-13-1设单位负反馈控制系统的开环传递函数为1Gs()=ss(+1)试求系统响应单位阶跃函数的过渡过程的上升时间t,峰值时间t,超调量σ%和过渡过rp程时间t。st≈2.418(s),t=3.628(s),σ%16.3%=,rpt=6s(∆=0.05),t=8s(∆=0.02)ss3-2试求图3-39所示控制系统的阻尼比ζ,无阻尼自振频率ω及响应单位阶跃函n数的过渡过程的超调量σ%峰值时间t。p系统的参数分别为Rs()ε()sKmCs()sTs(+1)−1m(1)K=10s,T=0.1s−mm−1(2)K=20s,T=0.1smm题3-2控制系统(1).ζ=0.5,ω=10,σ%16.3%≈,t≈0.363()snp(2).ζ=0.354,ω=14.1,σ%≈30.4%,t≈0.238()snp3-3设有一系统的闭环传递函数为2Cs()ωnφ()s==22Rs()s+2ζωs+ωnn为了使系统对阶跃输入的过渡过程,有约5%的超调量和2秒的过渡过程时间,试求ζ和ωn值应等于多大。课后答案网ζ=0.69,ω≈2.90(∆=0.02)nω≈2.17(∆=0.05)nwww.hackshp.cn3-4试应用劳斯-霍维兹稳定判据分析图3-40所示系统的稳定性。10(s+1)(1)Gs()=;(稳定)ss(−1)(s+5)Rs()ε()sCs()Gs()10−(2)Gs()=;(不稳定)ss(−1)(2s+3)题3-4控制系统24(3)Gs()=;(稳定)ss(+2)(s+4)若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn3s+1(4)Gs()=。(不稳定)22s(300s+600s+50)3-5已知单位负反馈系统的开环传递函数为KGs()=ss(+1)(s+2)试应用劳斯-霍维兹稳定判据确定欲使系统稳定时开环放大系数K的取值范围。05.2)作为补偿。[H(s)=1](1)确定所需的a值;∗(2)确定所希望的闭环极点对应的K值;(3)确定第三个闭环极点的位置。∗a=6k=27s=3.834-6已知系统如图所示,作出系统的闭环根轨迹,要求确定根轨迹的起始角和与虚轴的交点。∗1Rs()KCs()+s+−s(s+)2−2实轴根轨迹,[0,−∞]控制系统概图2渐近线:σ=−,ϕ=180,60,60°+°−°aa3π起始角:θ=−p14∗与虚轴交点:ω=±2(k=4)4-7某系统开环传递函数为课后答案网K(.025s+1)G(s)H(s)=H(s)=1www.hackshp.cns(5.0s+1)试用根轨迹法确定系统无超调的K值范围。023.324-8负反馈控制系统的开环传递函数为∗Ks(+2)GsHs()()=ss(+1)(s+3)(1)作系统根轨迹图;∗(2)求当ζ=5.0时,闭环的一对主导极点值,及其对应的K值。若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn(1)实轴根轨迹:[3,2],[1,0]−−−π渐近线:σ=−1,ϕ=±aa2分离点:d=−0.53(2)主导极点:s=−0.7±j1.2(ζ=0.5)1,22∗5k=,k≈334-9已知单位反馈控制系统的开环传递函数为1(s+a)4G(s)H(s)=2s(s+1)作以a为参变量的参数根轨迹图。以a为参量的根轨迹方程:1a4=−121ss(++s)4实轴根轨迹:[−∞,0]1分离点:d=−61π渐近线:σ=−,ϕ=π,±aa33与虚轴交点:课后答案网ω=±0.5(a=1)4-10已知单位反馈系统的开环传递函数www.hackshp.cn6.2G(s)=s(1.0s+1)(Ts+1)作以T为参变量的参数根轨迹图。1以为参量的根轨迹方程:T20.1s++s2.61i()=−12s(10.1)+sT实轴根轨迹:[−∞−,10]若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn终止角:θ=78.7°z14-11设系统结构如图4-26所示。(1)绘制k=5.0时的闭环根轨迹图;h(2)求k=5.0,k=0时,系统的闭环极点与对应的ζ值;h(3)绘制k=1时,以k为参变量的参数根轨迹图;h(4)当k=1时,分别求k=0、5.0、4的阶跃响应指标σ%、t,并讨论k大小hsh对系统动态性能的影响。Rs()kCs()k=0.5,k=10时h+s(s+)1−闭环极点为:−±3j11+ksh3ζ=控制系统概图10σ%=0.008%,t=1.17()ss4-12已知控制系统的开环传递函数如下:∗Ks(+2)(1)GsHs()()=;(s++1j2)(s+−1j2)∗Ks(+20)(2)GsHs()()=ss(+10+j10)(s+10−j10)试概略画出相应的闭环根轨迹图(要求算出根轨迹的起始角)。(1)实轴根轨迹课后答案网:[2,−−∞]会合点:−4.236p=−±1j2,θ=153.4°1,2p1(2)实轴根轨迹:www.hackshp.cn[0,20]−渐近线:σ=0,ϕ=±90°p=−10±j10aa1,2起始角:θ=°0p1若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn习题五5-15-1绘制下列开环传递函数的奈魁斯特图,并判断其闭环(负反馈)系统的稳定性。10(1)GsHs()()=;(10.5)(12)+s+s10(2)GsHs()()=�s(10.1)+s(1)Gj(ω)不包围图(1,0)−j点,又知开环右极点数p=0,所以系统稳定。(2)开环右根数p=0,Gj(ω)曲线不包围(1,0)−j点,所以系统稳定。5-25-2绘制下列传递函数的伯德图,并进行修正,以得到精确的特性曲线。(1)GsHs()()5(12)=+s;10(s+2)(2)GsHs()()=;ss(+1)(s+10)9(3)GsHs()()=。2ss(+0.5)(s+0.6s+1)(1)20lg513.98=dB12(s+1)(2)Gs()=2课后答案网1ss(+1)(s+1)1020lg26.02=dBwww.hackshp.cn18(3)Gs()=12s(s+1)(s+0.6s+1)0.520lg1825.1=dBζ=0.320lgM≈0.46dBr105-3设系统的传递函数Gs()=,求在频率为f=1HZ,幅值为R=10的正0.5s+1若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn弦输入信号作用下,系统的稳态输出ct()的幅值与相位。rt()=Risin(ωt)10sin2=iπtct()=RGji|(ω)|sin(2iπt+∠Gj(ω)=8.94sin(2πt−63.4)5-4图5-53中所示为最小相位系统的对数幅频特性,试求它们的传递函数G(s)。L()ωL()ω50−20−20240100ω02ω()a()bL()ωL()ω−20−4040−40−20ω200ω1ωcω−205ω−40−60()c()dL()ω40+4034−20010300ω−40课后答案网8()ewww.hackshp.cn对数幅频特性1ωωi(s+1)c1316.231.7(0.5s+1)ω1(a)Gs()=(b)Gs()=(c)Gs()=0.01s+1s21s(s+1)ω22500.01(s+0.4s+1)(d)Gs()=(e)Gs()=1121s(s+1)(s+1)[(0.01)s+0.02s+1](s+1)0.5163005005-5试绘制开环传递函数Gs()=的伯德图,并求稳定裕度。2ss(++s100)若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn5Gs()=121s(s+s+1)100100其中,放大环节,20lg513.98=dB1振荡环节:T=10ζ=0.05MdB()=20dBr由图知:ω=5cω=10gγ=86°,kdB()14(≈dB)gK5-6单位负反馈系统开环传递函数为Gs()=,试求使M≤rs(10.1)(10.01)+s+s1.5时,K值是多少?稳定裕度与剪切频率各为多少?提示:闭环系统为高阶系统,由1经验式M=,计算出γ=41.8°γsinγ画出k=1时的伯德图,由图得到k=10,ω=10,ω=28,kdB()18(=dB)cgg5-7单位负反馈系统,开环传递函数分别为课后答案网Im[GH]www.hackshp.cnIm[GH]Im[GH]-10-100Re-1ReRe()a()b()cIm[GH]Im[GH]Im[GH]-1-10Re0Re-10Re()f()d()e题5-7开环幅相特性若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cnKK(1)Gs()=(2)Gs()=(Ts+1)(Ts+1)(Ts+1)sTs(+1)(Ts+1)12312KKTs(+1)(Ts+1)(3)(4)12Gs()=Gs()=23sTs(+1)sKK(5)Gs()=(6)Gs()=Ts−1sTs(−1)它们的开环幅相频率特性曲线如图所示。试判别各系统的稳定性?(1)p=0,0型系统,N=−1,不稳定(2)p=0,Ⅰ型系统,N=0,稳定(3)p=0,Ⅱ型系统,N=−1,不稳定(4)p=0,Ⅲ型系统,N=0,稳定(5)p=1,0型系统,N=0,不稳定1(6)p=1,Ⅰ型系统,N=−,不稳定25-85-8已知单位负反馈系统的开环传递函数为13.3Gs()=2ssss(+1)(+0.81+1)24.594.054.05应用奈魁斯持稳定判据,论证系统是否稳定?课后答案网提示:(1)先画出概略的奈魁斯特图,www.hackshp.cn(2)应用奈氏判据判别系统是否稳定。5-95-9设二阶自动调速系统的闭环频率特性谐振峰值M=3,ω=15,试求该系统的rr超调量σ%和调整时间t。sζ=0.173,ω=15.47t=1.15()s,σ%=58.3%usK5-10某放大器的传递函数为Gs()=,测得其频率响应,当ω=lrad/s时,Ts+1幅频A=12/2,相频φ=−π/4,问放大系数K及时间常数T各为多少?若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cnk=12,T=1105-11设单位负反馈控制系统的开环传递函数Gs()=,当把下列输入信号作用s+1在闭环系统上时,试求系统的稳态输出。(1)rt()sin(=t+30)°(2)rt()=⋅2cos(2t−45)°(3)rt()sin(=t+30)°-2cos(2t-45°)(1)ct()=0.9054sin(it+24.8)°(2)ct()1.788cos(2=it−55.3)°(3)ct()0.9054sin(=it+24.8)1.788cos(2°−it−55.3)°5-12图(a)和(b)分别为某Ι型和某Ⅱ型系统的对数幅频特性的渐近线,试证:(1)ω1=Kν(2)ω2=Ka式中K和K分别为静态速度误差系数和静态加速度误差系数。νadBL()ωdBL()ω-20-40ω1-200ω0ωω2-40-40()a()b课后答案网题5-12对数幅频特性www.hackshp.cn若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn习题六6-1试分别画出图6-23中超前网络和滞后网络的伯德图。CRuiRuuiCu00题6-1校正网络ksRCs11Gs()==Gs()==Ts+1RCs+1Ts+1RCs+16-2试比较相位超前校正、相应滞后校正和相位滞后—超前校正的特点?并说明如何选用它们?6-3已知单位负反馈系统的开环传递函数为KGs()=s(0.5s+1)(s+1)−1�试采用校正方法分析设计,使校正后系统的速度误差系数Kv=5s;相位裕度γ≥40;幅值裕度KdBg()10≥dB。1+Ts110+sGs()==c1+βTs1100+s其中:T=10,β=10k=5,ω=0.5课后答案网cK6-4设原系统如图所示,其中Gs()=。若要求系统的剪切频率www.hackshp.cnss(+1)�ωc≥4.4rads/,相位裕度γ≥50;在单位斜坡输入信号作用下的稳态误差ess≤0.1,试确定相位超前环节的参数。R(s)C(s)G(s)+-1+αTs10.5+sαGs()==放大器增益提高6.5倍c1+Ts10.078+s其中:α=6.5,T=0.078题6-4控制系统k=10,ω=5c156-5已知原系统的不可变部分Gs0()=,要求用PD校正方法,使系s(0.1s+1)(s+1)若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn
课后答案网:www.hackshp.cn�统满足γ≥45,ω=0.5rads/。试确定校正环节的参数。c0.256-6设单位负反馈系统的开环传递函数为Gs()=,试进行相位超前校2s(0.25s+1)−1�正分析设计,使系统在频率ω=1s时提供约45的相位裕度。1+αTs14.36+sαGs()==放大器增益提高19倍c1+Ts10.23+s其中:α=19,T=0.236-7设单位负反馈控制系统的开环传递函数为KGs()=11s(s+1)(s+1)1060要求设计串联校正装置,使系统满足:(1)输入速度为2rad/s时,稳态误差不大于1/63(rad);�(2)相角裕度γ≥30,剪切频率ω=20rads/。c(1+Ts)(1+αTs)(10.112)(10.1)+s+s12取α=βGs()==c(1+βTs)(1+Ts)(10.71)(10.016)+s+s12其中:T=0.112,β=6.31T=0.016,α=6.326-8设单位负反馈控制系统的开环传递函数为14.4Gs()=课后答案网s(0.1s+1)要求采用速度反馈校正,使系统具有临界阻尼(即ζ=1)。试求校正环节的参数值,并比较校正前后系统的精度。www.hackshp.cnGs()=bs=0.0972sc校正前后都为Ⅰ型系统校正前开环增益K=14.41校正后开环增益K=12.6,校正后误差增大。2若侵犯了您的版权利益,敬请来信告知!www.hackshp.cn'
您可能关注的文档
- 学法大视野 考一本 高中地理 海豚出版社 习题参考答案
- 可编程序控制器应用技术 赵春生 人民邮电出版社 课后答案 第1章 课后答案
- 严蔚敏版数据结构课后习题答案-完整版
- 课题_结构力学龙驭球第三版课后习题答案
- 岩石力学与地下工程 (蔡美峰 何满潮 刘东燕 著) 科学出版社 课后答案
- 研究生英语阅读教程上册UNIT1-6课后答案及翻译刘朝武主编
- 控制工程导论 (周雪琴 张洪才 著) 西北工业大学出版社 课后答案
- 控制工程基础 (董景新 著) 清华大学出版社 课后答案
- 液压与气压传动_左建明主编_第四版_课后答案
- 一元函数微积分 (魏贵民 胡灿 著) 高等教育出版社 课后答案《一元函数微积分》习题解答3-1到3-6
- 控制工程基础 第三版 (董景新 赵长德 著) 清华大学出版社 培训习题 课后答案
- 一元函数微积分 (魏贵民 胡灿 著) 高等教育出版社 课后答案《一元函数微积分》习题解答3-7到3-9
- 一元函数微积分 (魏贵民 胡灿 著) 高等教育出版社 课后答案《一元函数微积分》习题解答第二章
- 一元函数微积分 (魏贵民 胡灿 著) 高等教育出版社 课后答案《一元函数微积分》习题解答第四章
- 一元函数微积分 (魏贵民 胡灿 著) 高等教育出版社 课后答案《一元函数微积分》习题解答第一章
- 医学统计学 第二版 颜虹主编 课后答案 人民卫生出版社-
- 医用物理学 (李旭光 著) 北京出版社邮电大学 课后答案
- 医用物理学 第七版 (胡新珉 著) 人民卫生出版社 课后答案
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明