
- 366.74 KB
- 2022-04-22 13:43:50 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn四轮轮毂电机驱动电动汽车高效制动能量#回收策略研究1211*李建华,郑迎,靳立强,田端洋5(1.吉林大学汽车仿真与控制国家重点实验室;2.华域汽车系统股份有限公司)摘要:提出了基于模糊控制理论的电机再生制动力与液压制动力的分配控制策略,设计了不同制动强度工况下制动力的分配控制策略,搭建了联合仿真模型,并进行了相应试验,结果10表明,本文所制定的制动能量回收控制策略对制动能量的回收率都能达到40%以上,实现了电动汽车的制动能量高效回收,同时制定的防抱死策略保证了车辆的制动安全性。关键词:车辆工程;制动能量回收;模糊控制;轮毂电机。中图分类号:U469.7215ResearchonEfficientRegenerativeBrakingControlforfourwheelhubmotordrivenelectricvehicle1211LIJianhua,ZHENGYing,JINLiqiang,TIANDuanyang(1.StateKeyLaboratoryofAutomotiveSimulationandControl,JilinUniversity,Changchun130022,China;202.HUAYUAutomotiveSystemsCo.,Ltd.)Abstract:Inthispaper,acontrolstrategyofdistributionofmotorregenerativebrakingforceandhydraulicpowerbasedonfuzzycontroltheorywasdesigned,andacontrolstrategyofhebrakingforcedistributionunderdifferentbrakingintensityconditionsalsowasdesigned,setupaco-simulationmodel,andthecorrespondingtestwastaken,theresultsshowthatthebrakingenergyrecoverycontrol25strategyfortherecoveryofbrakingenergyratecanreachmorethan40%,thehighefficientrecoveryofbrakingenergyofelectricvehicleswasachieved,withtheestablishmentoftheantilockbrakingstrategy,thevehiclebrakingsafetyhasbeenguaranteed.Keywords:Vehicleengineering;Brakingenergyregeneration;Fuzzycontrol;Wheelhubmotor.300引言在我国,汽车排放已经成为城市大气污染的重要因素,电动汽车由于具有节能和降低排放的巨大潜力,成为当今节能环保汽车技术研发的热点,其中轮毂电机驱动方案仅通过驱动[1-3]电机即可实现独立控制,传动系的响应速度快得多,因此车轮驱动力控制变得简单容易[4-5]35实现。这对提高电动汽车的各项性能是非常重要的,同时电动汽车制动能量回收技术在节能减排中起到了重要的作用。在电动汽车技术研究领域,再生制动控制理论及相关技术一直是研究热点。1997年丰[6]田公司推出第一辆产品化的混合动力轿车Prius,但是为了不影响汽车的制动效果,当时的再生制动子系统仅仅是在传统机械摩擦制动系统上的简单叠加,只起到辅助制动的作用,40所以制动能量回收的效果很一般。然而随着再生制动技术的逐步成熟,04版Prius混合动力[7]轿车通过引进电子伺服制动控制技术,实现了四个车轮独立控制的同时也使得制动过程更基金项目:高等学校博士学科点专项基金(20130061120041)作者简介:李建华(1979.11-),男,副教授、硕导,主要研究方向:汽车底盘电控系统设计与集成.E-mail:ljh_lotus@126.com-1-
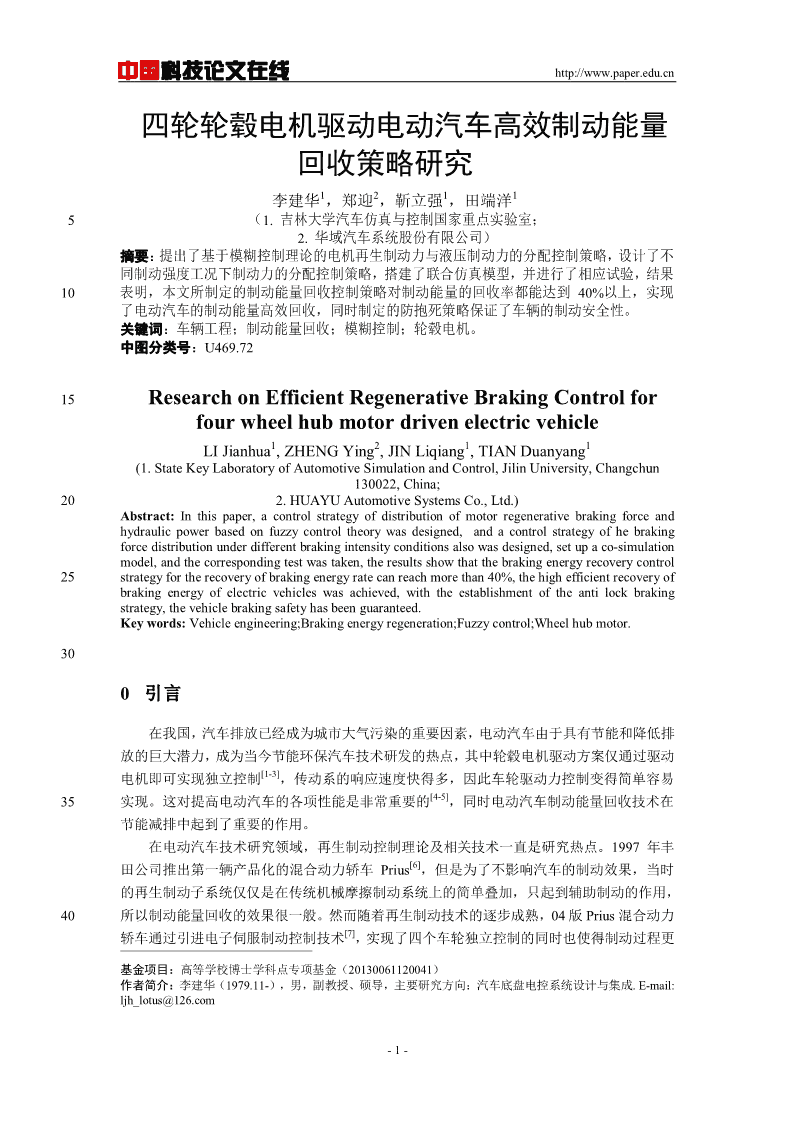
中国科技论文在线http://www.paper.edu.cn[8]加平稳,混合动力汽车Prius制动能量的回收对整车效率提高的贡献率达到了20%。从国内外的实验数据看,Prius通过实现机电协调再生制动,制动能量回收率得到明显提升,其[9,10]能量回收率是国内并联再生制动技术的两倍以上,整车能量利用率也明显提升。由于45Prius采用的仍是集中电机驱动,这种利用ABS系统与电机系统协调控制实现的再生制动系统仍未能充分发挥电动汽车再生制动能力,只是在很低的制动强度时才实现全电制动。本文主要从轮毂电机驱动这种全新的整车构型下手,制定相应的控制策略以实现其最大限度的制动能量回收。1制动能量回收及制动防抱死控制策略50电机在制动过程中的参与程度决定了制动能量的回收率,期望回收的制动能量就越多,就需要电机参与程度越高。然而并不是所有工况下都能通过电机实现再生制动,因此为了制动系统在满足整车制动力需求的前提下,最大限度的回收制动能量,应保证制动系统能够满足下列设计要求:(1)对制动系统进行合理的分配,协调各车轮的制动力矩满足整车的制动性能;55(2)制动系统要有容错能力与冗余能力,在制动系统出现故障无法提供再生制动力时,控制系统应能够快速切换到液压制动模式,以保证整车的制动可靠性。(3)再生制动控制策略应制定合理,保证制动能量的回收效率;并在紧急制动时,能够有效防止车轮抱死现象的发生。1.1制动需求模式判断60首先对制动的工况进行总体判断从而确定电动轮汽车的制动模式,其判断的流程如图1所示。根据电池的SOC值、制动踏板的开关信号以及踏板的行程进行判断。如果制动开关打开时,电池的SOC值高于0.85,此时再为电池充电容易引起过充而对电池造成的损害,制动系统将不再进行制动能量回收而转换到纯液压制动模式。如果在制动时电池的SOC值低于0.85,将采集到的制动踏板行程l信号与踏板行程预设的门限值λ进行比较,如果采集65到的行程值小于门限值,表明此时为低强度制动工况,采用纯电机回收制动模式;如果采集到的行程值大于门限值,表明此时为高强度制动工况,采用机电复合制动模式。整车的机电复合制动仿真软件设计方案如图2所示。开始N制动踏板开结束关是否打开YN纯液压制SOC<0.85?动模式YY小强度纯电机踏板位移l<λ?制动模式N大强度复合制动模式N返回速度V=0?Y结束图1制动模式判断流程图70Fig.1Brakemodeflowchart-2-
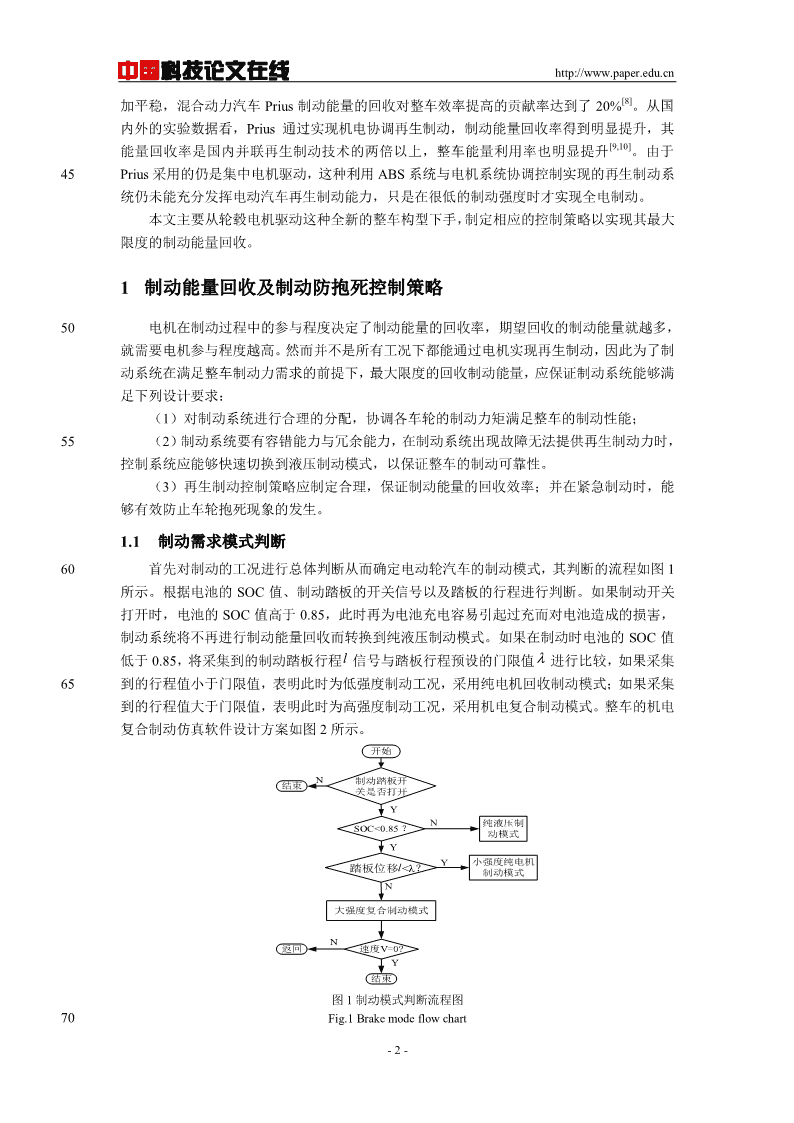
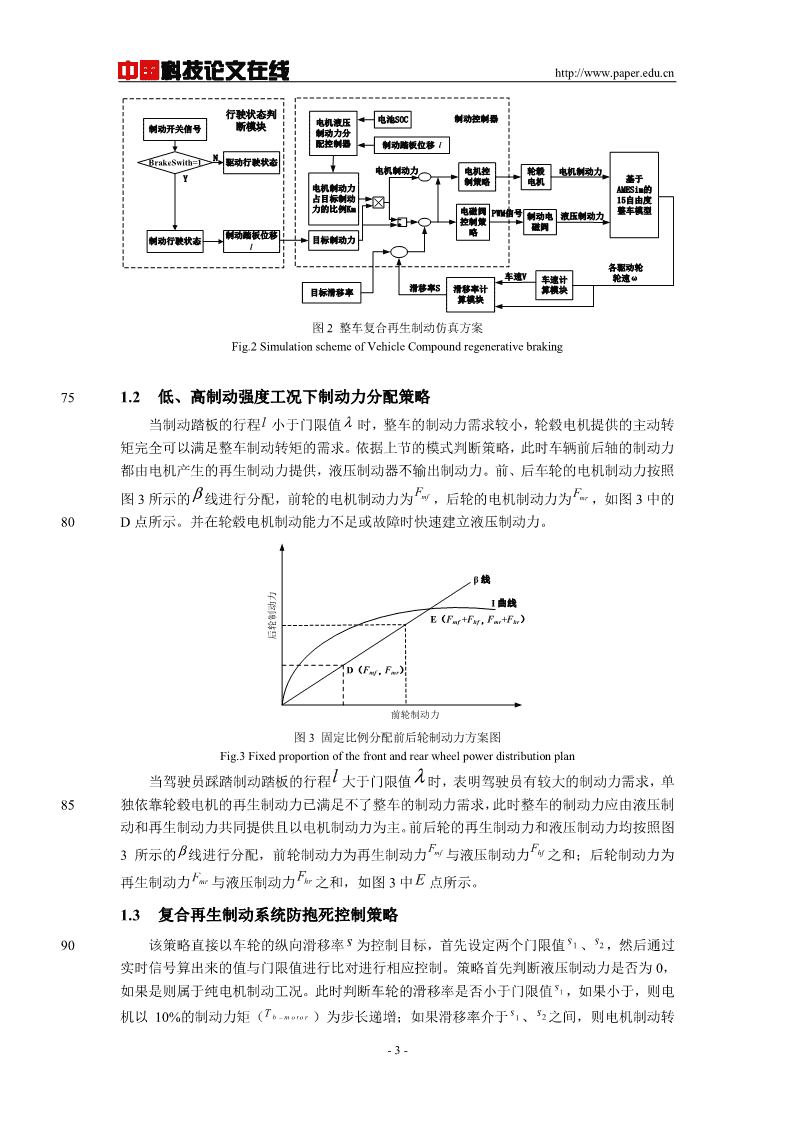
中国科技论文在线http://www.paper.edu.cn行驶状态判电池SOC制动控制器断模块电机液压制动开关信号制动力分配控制器制动踏板位移lNBrakeSwith=1驱动行驶状态电机制动力电机控轮毂电机制动力Y制策略电机基于电机制动力AMESim的占目标制动15自由度力的比例Km电磁阀PWM信号整车模型制动电液压制动力控制策磁阀制动踏板位移略制动行驶状态目标制动力l各驱动轮车速V车速计轮速ω目标滑移率滑移率S滑移率计算模块算模块图2整车复合再生制动仿真方案Fig.2SimulationschemeofVehicleCompoundregenerativebraking751.2低、高制动强度工况下制动力分配策略当制动踏板的行程l小于门限值λ时,整车的制动力需求较小,轮毂电机提供的主动转矩完全可以满足整车制动转矩的需求。依据上节的模式判断策略,此时车辆前后轴的制动力都由电机产生的再生制动力提供,液压制动器不输出制动力。前、后车轮的电机制动力按照图3所示的β线进行分配,前轮的电机制动力为Fmf,后轮的电机制动力为Fmr,如图3中的80D点所示。并在轮毂电机制动能力不足或故障时快速建立液压制动力。β线I曲线E(Fmf+Fhf,Fmr+Fhr)后轮制动力D(Fmf,Fmr)前轮制动力图3固定比例分配前后轮制动力方案图Fig.3Fixedproportionofthefrontandrearwheelpowerdistributionplan当驾驶员踩踏制动踏板的行程l大于门限值λ时,表明驾驶员有较大的制动力需求,单85独依靠轮毂电机的再生制动力已满足不了整车的制动力需求,此时整车的制动力应由液压制动和再生制动力共同提供且以电机制动力为主。前后轮的再生制动力和液压制动力均按照图3所示的β线进行分配,前轮制动力为再生制动力Fmf与液压制动力Fhf之和;后轮制动力为FF再生制动力mr与液压制动力hr之和,如图3中E点所示。1.3复合再生制动系统防抱死控制策略ss90该策略直接以车轮的纵向滑移率s为控制目标,首先设定两个门限值1、2,然后通过实时信号算出来的值与门限值进行比对进行相应控制。策略首先判断液压制动力是否为0,s如果是则属于纯电机制动工况。此时判断车轮的滑移率是否小于门限值1,如果小于,则电机以10%的制动力矩(Tbmotor−)为步长递增;如果滑移率介于s1、s2之间,则电机制动转-3-
中国科技论文在线http://www.paper.edu.cnsT矩保持,如果滑移率大于2,则电机以10%的制动力矩(bmotor−)为步长递减,依此循环v95直至车速低于退出防抱死控制的设定车速0。如果当前的液压制动力不为0,则进入复合制动工况防抱死控制逻辑,此时的控制逻辑和纯电机制动时的相似,区别是在车轮的滑移率s大于滑移率的上限值2时,在复合制动工况防抱死控制逻辑要关闭液压制动回路中的两个增压阀,使车轮的液压制动力矩保持不变,并按照纯电机制动工况防抱死控制逻辑对车轮的电机制动力矩进行调节实现车轮的防抱死控制。其控制逻辑的总流程图如图4所示。参考车速v、纵向滑移率s是否Th=0纯电机制动防抱死复合制动防抱死控控制策略制策略电机制动转否电机制动转矩增s>=s?否矩增大s>=s1?1大10%Tb-motor是10%Tb-motor是电机制动力电机制动力矩保持不变矩保持不变电机制动转液压制动电磁是s>=s2?矩减小s>=s?是阀关闭同时电210%T机制动转矩减否b-motor否小10%Tb-motor电机制动力电机制动力矩保持不变矩保持不变否是v
您可能关注的文档
- 单羰基姜黄素类似物的抗肿瘤靶点发现.pdf
- 卵巢癌起源理论与浆液性卵巢癌的输卵管起源新观点.pdf
- 卷接机斜置轴承分离装置设计与仿真.pdf
- 参芪解郁方对产后抑郁大鼠TregTh17平衡的干预作用研究.pdf
- 双酪氨酸诱导小鼠肠道氧化应激及炎症反应.pdf
- 双链DNA可能的几种局部拓扑结构.pdf
- 含油异丁烷的燃爆实验研究.pdf
- 吸热表面热辐射特性对太阳能腔式吸热器热效率的影响.pdf
- 四种发光甲虫的转录组测序和系统发育分析.pdf
- 固体氧化物燃料电池与微型燃气轮机发电系统半实物仿真研究.pdf
- 土下地膜覆盖对春玉米产量及水分利用效果的影响.pdf
- 基于ANSYS Workbench的4000Nm全液压坑道钻机回转平台优化设计.pdf
- 基于ECR低能电子照射的超精密金属抛光技术研究.pdf
- 基于SIFT的图像复制粘贴篡改检测.pdf
- 基于分层技术的快速最大方差展开算法及其在过程监测中的应用.pdf
- 基于区域映射与全概率模型的多示例图像检索方法.pdf
- 基于卫星测高回波波形的南极海域重力异常研究.pdf
- 基于异丙醇锆阴极修饰层的高效聚合物太阳能电池.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明
-
 关注微信公众号售出明细实时看
关注微信公众号售出明细实时看