

- 555.01 KB
- 2022-04-22 13:43:43 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn卷接机斜置轴承分离装置设计与仿真**王艳军,王文格(湖南大学机械与运载工程学院,长沙410082)5摘要:随着伺服控制技术的发展,在超高速卷接机组的研制中,采用独立伺服驱动代替传统的机械传动成为发展趋势,针对传统分离装置结构复杂,尤其是负载波动范围大,不利于伺服驱动,设计了卷接机斜置轴承分离装置,利用PRO/E建立了三维模型,并根据实际工况,利用ADAMS进行了动力学仿真,分析了其动力学特性,获得了动力学特性曲线,仿真分10析结果验证了斜置轴承分离装置的可行性和合理性,对比分析斜置轴承分离装置和传统端面凸轮分离装置的仿真数据,验证了斜置轴承分离装置的优越性,为卷接机的自主研发和独立伺服驱动的应用提供了一定的参考价值。关键词:机械制造及其自动化;卷接机;伺服驱动;动力学分析;斜置轴承中图分类号:TS4315ThedesignandsimulationanalysisofseparationDeviceoftobacco-machinerywithobliquebearingsWANGYanjun,WANGWenge(MechanicalandVehicalEngineeringSchool,HunanUniversity,Changsha410082)20Abstract:Withtheadvancementandoptimizationofservocontroltechnology,independentservodriveinsteadofthetraditionalmechanicaldrivehasbecomeatrendinthedevelopmentandmanufacturingofultra-highspeedtobaccomachinery.Theseparationdevicehasbeendesignedsincethetraditionalonesareofcomplexstructure,vastloadfluctuationandunsuitabilitytoservodriveoftraditionalseparationplant.Thethree-dimensionalmodelwiththeapplicationofPRO/Eisestablished.25Astimulationanddynamicanalysisofthethree-dimensionalmodelismadeundertheassistanceofADAMS.Asaresult,thedynamicscurveisobtained.Simulationresultsverifythattheseparationdevicewithobliquebearingisfeasibleandsuitableforpragmaticuse.Furthermore,thecomparisonofthesimulationresultsofobliquebearingdeviceandendcamdeviceillustratesthatobliquebearingdeviceisbetterthanendcamplan.Theaforementionedresultsprovidecertainreferencevalueforthe30independenceresearchanddevelopmentaswellastheapplicationoftobaccomachinery.Keywords:MechanicalmanufactureandAutomationMajor;tobacco-machinery;servomotor;dynamicsanalysis;obliquebearing0引言35驱动技术对于机械产品的变革具有深刻的意义,应用独立伺服驱动代替传统的机械传[1]动,可以提高传动精度,成为机械产品创新设计和产品升级的有效途径。伺服电机的性能是伺服驱动系统代替传统机械传动的应用中的重要因素,而负载的变[2]化规律决定着电机的选择。在同样的负载平均值下,负载波动幅度的降低,有利于电机性[3]能的发挥,延长电机的使用寿命。目前,卷接机分离装置结构主要有“相交轴”结构、圆柱[4]40凸轮结构和端面凸轮结构,其中端面凸轮结构在维修性、可靠性等方面更具优势,但其结构复杂,且凸轮制造精度要求高,制造成本高,尤其在稳定运行状况下负载变化范围比较大,不利于伺服控制的应用,目前的研究主要通过优化凸轮曲线来减小负载力矩波动,但其优化效果有限。因此,设计一种结构简单、稳定运行时负载力矩范围变化小的分离装置,对于伺作者简介:王艳军(1991-),女,硕士研究生,主要研究方向:机械设计通信联系人:王文格(1966-),男,教授、博导,主要研究方向:机械电子工程,烟草机械.E-mail:wangwg@hnu.edu.cn-1-
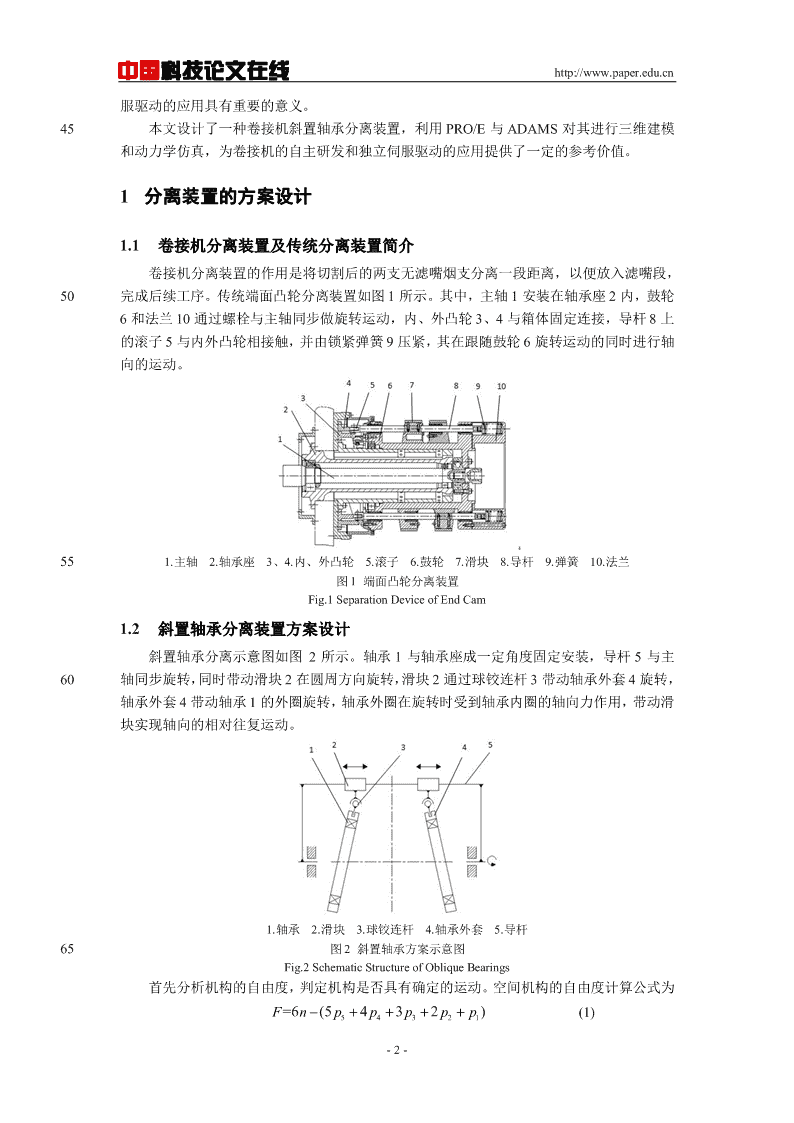
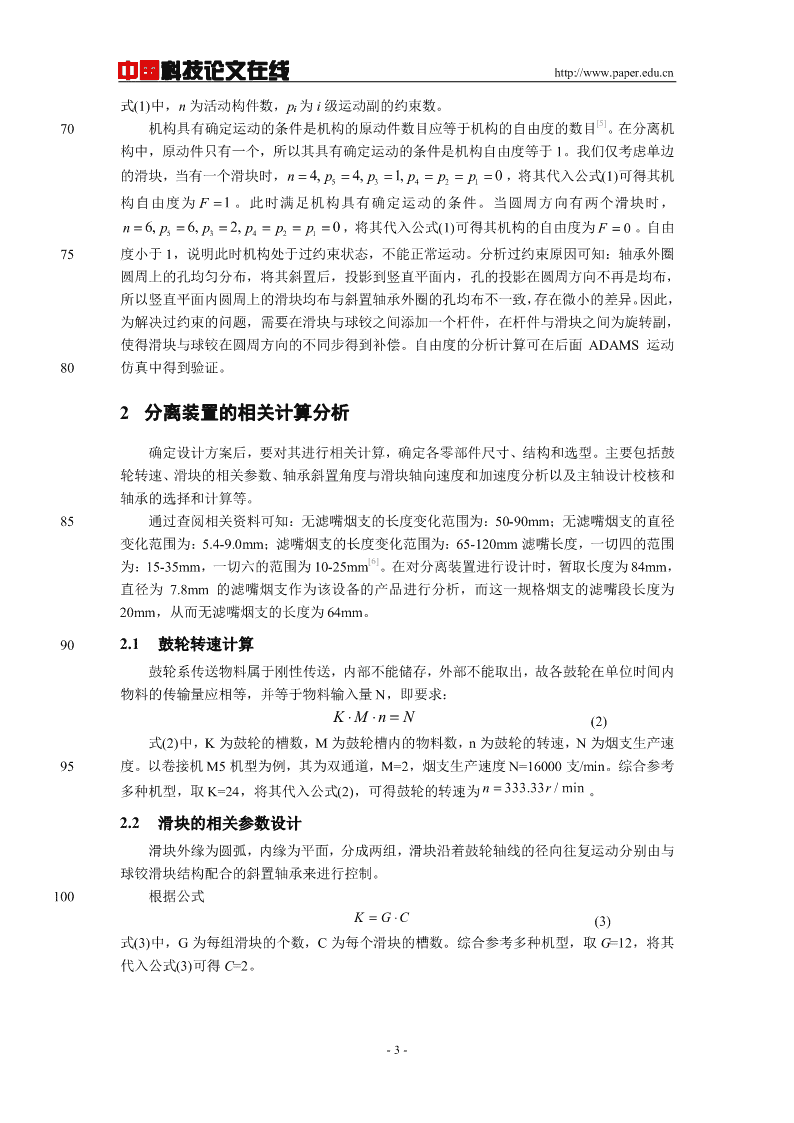
中国科技论文在线http://www.paper.edu.cn服驱动的应用具有重要的意义。45本文设计了一种卷接机斜置轴承分离装置,利用PRO/E与ADAMS对其进行三维建模和动力学仿真,为卷接机的自主研发和独立伺服驱动的应用提供了一定的参考价值。1分离装置的方案设计1.1卷接机分离装置及传统分离装置简介卷接机分离装置的作用是将切割后的两支无滤嘴烟支分离一段距离,以便放入滤嘴段,50完成后续工序。传统端面凸轮分离装置如图1所示。其中,主轴1安装在轴承座2内,鼓轮6和法兰10通过螺栓与主轴同步做旋转运动,内、外凸轮3、4与箱体固定连接,导杆8上的滚子5与内外凸轮相接触,并由锁紧弹簧9压紧,其在跟随鼓轮6旋转运动的同时进行轴向的运动。551.主轴2.轴承座3、4.内、外凸轮5.滚子6.鼓轮7.滑块8.导杆9.弹簧10.法兰图1端面凸轮分离装置Fig.1SeparationDeviceofEndCam1.2斜置轴承分离装置方案设计斜置轴承分离示意图如图2所示。轴承1与轴承座成一定角度固定安装,导杆5与主60轴同步旋转,同时带动滑块2在圆周方向旋转,滑块2通过球铰连杆3带动轴承外套4旋转,轴承外套4带动轴承1的外圈旋转,轴承外圈在旋转时受到轴承内圈的轴向力作用,带动滑块实现轴向的相对往复运动。1.轴承2.滑块3.球铰连杆4.轴承外套5.导杆65图2斜置轴承方案示意图Fig.2SchematicStructureofObliqueBearings首先分析机构的自由度,判定机构是否具有确定的运动。空间机构的自由度计算公式为Fnppppp=6(−++++5432)(1)54321-2-
中国科技论文在线http://www.paper.edu.cn式(1)中,n为活动构件数,pi为i级运动副的约束数。[5]70机构具有确定运动的条件是机构的原动件数目应等于机构的自由度的数目。在分离机构中,原动件只有一个,所以其具有确定运动的条件是机构自由度等于1。我们仅考虑单边的滑块,当有一个滑块时,nppppp======4,4,1,0,将其代入公式(1)可得其机53421构自由度为F=1。此时满足机构具有确定运动的条件。当圆周方向有两个滑块时,nppppp======6,6,2,0,将其代入公式(1)可得其机构的自由度为F=0。自由5342175度小于1,说明此时机构处于过约束状态,不能正常运动。分析过约束原因可知:轴承外圈圆周上的孔均匀分布,将其斜置后,投影到竖直平面内,孔的投影在圆周方向不再是均布,所以竖直平面内圆周上的滑块均布与斜置轴承外圈的孔均布不一致,存在微小的差异。因此,为解决过约束的问题,需要在滑块与球铰之间添加一个杆件,在杆件与滑块之间为旋转副,使得滑块与球铰在圆周方向的不同步得到补偿。自由度的分析计算可在后面ADAMS运动80仿真中得到验证。2分离装置的相关计算分析确定设计方案后,要对其进行相关计算,确定各零部件尺寸、结构和选型。主要包括鼓轮转速、滑块的相关参数、轴承斜置角度与滑块轴向速度和加速度分析以及主轴设计校核和轴承的选择和计算等。85通过查阅相关资料可知:无滤嘴烟支的长度变化范围为:50-90mm;无滤嘴烟支的直径变化范围为:5.4-9.0mm;滤嘴烟支的长度变化范围为:65-120mm滤嘴长度,一切四的范围[6]为:15-35mm,一切六的范围为10-25mm。在对分离装置进行设计时,暂取长度为84mm,直径为7.8mm的滤嘴烟支作为该设备的产品进行分析,而这一规格烟支的滤嘴段长度为20mm,从而无滤嘴烟支的长度为64mm。902.1鼓轮转速计算鼓轮系传送物料属于刚性传送,内部不能储存,外部不能取出,故各鼓轮在单位时间内物料的传输量应相等,并等于物料输入量N,即要求:K⋅⋅=MnN(2)式(2)中,K为鼓轮的槽数,M为鼓轮槽内的物料数,n为鼓轮的转速,N为烟支生产速95度。以卷接机M5机型为例,其为双通道,M=2,烟支生产速度N=16000支/min。综合参考多种机型,取K=24,将其代入公式(2),可得鼓轮的转速为nr=333.33/min。2.2滑块的相关参数设计滑块外缘为圆弧,内缘为平面,分成两组,滑块沿着鼓轮轴线的径向往复运动分别由与球铰滑块结构配合的斜置轴承来进行控制。100根据公式K=⋅GC(3)式(3)中,G为每组滑块的个数,C为每个滑块的槽数。综合参考多种机型,取G=12,将其代入公式(3)可得C=2。-3-
中国科技论文在线http://www.paper.edu.cn2.3轴承斜置角度与滑块轴向速度及加速度分析105设分离距离固定为k,轴承的半径为R,则轴承斜置的角度为θ=arcsin(/2)kR(4)式中θ∈(0,90),为使轴承斜置后在竖直平面内的投影近似圆,需要满足RRcosθ=,即cosθ≈1,故θ越小越好。分离距离kR=2sinθ为定值,故在满足基本尺寸情况下,R应尽量取大值。110图3运动轨迹分析图Fig.3MotionAnalysischart如图3所示,z轴为装置的主轴方向,轴承运动的轨迹在x-y平面和y-z平面的对应如图,假设圆周运动的角速度为ω,以a点为运动起点,t秒时运动到p点,则p点的坐标为115yR=cosωt,将其对应到斜置角度为θ的轴承上,其坐标z(=−Ry)tanθ,将yR=cosωt代入可得z(=−Rt1cos)ωθtan,对其进行一次求导可得速度vR=⋅ωθωtansint,对其进行2二次求导可得加速度aR=⋅ωθωtancost。所以,滑块的轴向速度与加速度均为正弦变化,速度为v=0时为烟支交界处。此处计算可在仿真曲线中得到验证。主轴设计与校核以及轴承的选择和计算与正常的机械结构设计无异,在此处不再一一列[7-8]120出。2.4负载力矩的分析在分析负载力矩时,可将鼓轮作用于电机轴上的负载力矩T分为下列三类:(1)惯量力矩T:仅作用于启动和停止的过渡过程。惯量力矩可通过回转体转动惯量和j角加速度计算获得:n⋅2πω=60∂ω125α=(5)∂tTJ=αj式(5)中:J为转动惯量,n为轴的转速,ω为角速度,α为角加速度。在鼓轮轴转速及转动惯量确定的情况下,利用以上公式便可计算得出过渡过程所产生的惯量力矩。(2)摩擦力矩T:作用于全过程。直驱电机的轴在轴承座里由两个轴承支撑。轴承的径f130向和轴向摩擦系数通常参考设计手册,由于滚轮轴承采用脂润滑,且转速较低,因此不考虑-4-
中国科技论文在线http://www.paper.edu.cn轴承的热膨胀和离心力作用引起的摩擦系数变化,脂润滑的特点是从静止状态启动时摩擦系数较大,启动后摩擦系数稳定,查阅相关资料取其静摩擦系数为0.04,动摩擦系数为0.02。由轴承引起的摩擦力矩如下:DTF=⋅⋅μ(6)fr2135式(6)中,F为轴颈处的摩擦力,μ为摩擦系数,D为轴颈直径。r(3)载荷力矩T:作用于全过程。载荷扭矩包括:烟支动作力矩、负压风影响力矩等。i各种载荷负载力矩需具体分析,一般认为烟支动作力矩对鼓轮轴上总负载力矩影响较小。3分离装置的建模和仿真分析3.1分离装置的建模140在对相关参数计算分析后,结合分离装置的实际应用需求,经过反复的尺寸修正和结构[9]完善,确保装置在结构上不会出现干涉及无法装配等情况。利用PRO/E完成对装置零部件的建模和装配,其三维装配图如图4所示,滑块和轴承等内部结构如图5所示。图4分离鼓轮三维装配图145Fig.4Three-DimensionalAssemblyDrawingsofSeparatingDevice图5分离装置内部结构装配图Fig.5Separationplantinternalstructureassemblydrawing1503.2斜置轴承分离装置仿真分析对分离鼓轮进行动力学分析时,需先将PRO/E模型导入到ADAMS中。将建好的模[10]型保存为PARASOLID(*.x_t)格式的文件,直接导入ADAMS中。在ADAMS中定义各[11]个零件的材料及性能参数,如表1所示,根据装配关系添加约束,并施加相应的力和运动,得到ADAMS仿真模型。155-5-
中国科技论文在线http://www.paper.edu.cn表1零部件材料及性能参数Tab.1Components’MaterialandPerformanceparameter33112零件材料密度D/(×10kg/m)杨氏模量Y/(×10N/m)泊松比P主轴40Cr7.872.110.277配气座HT2507.281.380.156鼓体ZL3022.57.00.34分烟块ZL3022.57.00.34承烟槽ZL3022.57.00.34配芯轴座40Cr7.872.110.277垫圈1Cr18Ni97.921.840.243侧板5A032.697.00.33注:其他未注明零件材料均设置为钢(D=7.8,Y=2.07,P=0.29)。首先分析鼓轮稳态运行下滑块的位移,验证此装置是否能满足分离距离的精度要求。160根据前面的计算,仿真时分离鼓轮稳定运行的转速为设定为333.3r/min,即1998°/s,仿真得到的各滑块位移数据如表2,目标分离距离为46mm,由表格数据可知,滑块的运动精度满足0.1mm的要求。表2各组滑块分离距离(单位均为mm)Tab.2SeparationDistanceofSmokePointsBlocks(unit:millimeter(s))组号左滑块分离距离右滑块分离距离左右滑块分离距离之和122.98922.999345.9883222.999122.999145.9982322.999422.999645.999422.998722.998645.9973522.999422.999445.9988622.999922.999145.999722.999322.999245.9985822.99922.999145.9981922.999722.999645.99931022.999922.998745.99831122.999422.999445.99881222.999122.999145.9982165滑块的速度曲线如图6所示,曲线满足正弦运动规律,验证了速度分析的合理性,其中最大速度为0.39m/s。滑块的加速度曲线如图7所示,也符合正弦运动规律,验证了加速度2分析的合理性,其中最大加速度为14.0858m/s。稳态时负载变化曲线如图8所示,负载变化范围为3.09-4.13Nm。-6-
中国科技论文在线http://www.paper.edu.cn170图6稳态时滑块速度变化曲线Fig.6VelocityVariationCurveinSteadyState图7稳态时滑块加速度变化曲线175Fig.7AccelerationVariationCurveinSteadyState图8稳态时负载变化曲线Fig.8LoadVariationCurveinSteadyState3.3仿真分析对比180将斜置轴承分离装置的仿真分析数据与传统端面凸轮分离装置的仿真数据进行对比,对比数据如表3所示。由表可以看出,斜置轴承分离装置与传统端面凸轮分离装置相比较,滑块的速度和加速度均有所减小,最大速度减小了31%,最大加速度减小了47%,有利于避免烟支空头;稳态负载和负载变化范围也均有所减小,负载平均值减小了43%,负载波动幅度减小了50%,降低了对伺服电机性能的要求。185表3对比分析(稳态转速为400000/s)Tab.3ComparativeAnalysisofAlternatives(Steady-statespeed400000/s)斜置轴承端面凸轮-1最大速度/(m⋅s)0.801.16-2最大加速度/(m⋅s)56.42105.02稳定负载/(Nm)1.62~5.642.24~10.47负载平均值/(Nm)3.636.355-7-
中国科技论文在线http://www.paper.edu.cn负载波动幅度/(Nm)4.048.234结论针对端面凸轮分离装置负载变化较大问题,本文设计了一种斜置轴承分离装置,完成了基本结构设计和三维建模,并利用虚拟样机对其进行相关的动力学仿真分析及对比,验证了190结构方案的可行性和优越性。斜置轴承分离装置降低了系统对伺服电机性能的要求,为卷接机的自主研发和独立伺服驱动的应用提供了一定的参考价值。[参考文献](References)[1]谭士威,王文格,饶兴华.伺服驱动滑块分离装置的研究及优化[J].机械科学与技术,2014,33(3):195372-377.[2]刘江,唐传军,陈经界.倒置式车削中心交流伺服电机的选型[J].工艺与装备,2010,(3):71-75.[3]聂挺,王文格,戴俊良.负载动态特性对伺服电机跟随性能影响研究[J].工程设计学报,2013,20(4):309-314.[4]YJ19-YJ29卷接机组编写组.YJ19-YJ29机组[M].北京:北京出版社,2000.200[5]YJ17-YJ27卷接机组编写组.YJ17-YJ27机组[M].北京:中国科学技术出版社,2001.[6]孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006.[7]于建军.卷烟工艺学[M].北京:中国农业出版社,2003.[8]成大先.机械设计手册[M].北京:化学工业出版社,2010.[9]佟河亭,冯辉,李超.Pro/ENGINEER中文版习题精解[M].北京:人民邮电出版社,2001.205[10]刘小龙,赵彦峻,葛文庆.医疗助力下肢骨骼设计及动力学仿真分析[J].工程设计学报,2016,23(4):327-332.[11]贾长治,殷军辉,薛文星.ADAMS虚拟样机从入门到精通[M].北京:机械工业出版社,2010.-8-'
您可能关注的文档
- 光敏感型水凝胶的研究进展.pdf
- 关于《敖氏伤寒金镜录》的作者及版本流传的探讨.pdf
- 利用水文模型研究GPS站坐标时间序列.pdf
- 利用番茄红素提高细胞重编程效率的研究.pdf
- 利用高密度基因组芯片估计绵羊SNP之间的重组率和有效群体大小.pdf
- 制备温度对BiFeO3薄膜结构及性能的影响.pdf
- 单件生产系统的动态调度方法.pdf
- 单羰基姜黄素类似物的抗肿瘤靶点发现.pdf
- 卵巢癌起源理论与浆液性卵巢癌的输卵管起源新观点.pdf
- 参芪解郁方对产后抑郁大鼠TregTh17平衡的干预作用研究.pdf
- 双酪氨酸诱导小鼠肠道氧化应激及炎症反应.pdf
- 双链DNA可能的几种局部拓扑结构.pdf
- 含油异丁烷的燃爆实验研究.pdf
- 吸热表面热辐射特性对太阳能腔式吸热器热效率的影响.pdf
- 四种发光甲虫的转录组测序和系统发育分析.pdf
- 四轮轮毂电机驱动电动汽车高效制动能量回收策略研究.pdf
- 固体氧化物燃料电池与微型燃气轮机发电系统半实物仿真研究.pdf
- 土下地膜覆盖对春玉米产量及水分利用效果的影响.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明