

- 679.54 KB
- 2022-04-22 13:44:44 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn#黑加仑采收机的设计与试验*王业成,徐允飞,靳亚东(东北农业大学工程学院)5摘要:为了提高黑加仑浆果的采收效率、降低生产成本及减轻劳动强度,对自走式黑加仑采收机进行了整体结构设计,并对其惯性激振器进行了运动分析,建立了采收系统的动力学模型,获得工作参数、结构参数对采收指振动幅度的影响。根据分析结果,试制了黑加仑采收样机,并进行了田间试验,试验表明:采收机可以一次可完成浆果采收、收集、清选、运送10作业,作业效率高,实现了黑加仑田间机械化收获;在一定的农艺要求下,采收样机的采收率为89.9%,损失率为8.9%,基本可满足生产需求。关键词:黑加仑;浆果;采收机;收获中图分类号:S225.9315DesignandexperimentofBlackcurrentharvesterWANGYecheng,XUYunfei,JIYadong(CollegeofEngineering,NortheastAgriculturalUniversity)Abstract:Inordertoimprovetheharvestingefficiencyofblackcurrantberries,reducethecostof20productionandreducelaborintensity,thewholestructureofself-propelledblackcurrantharvesterwasdesigned.Themotionanalysisoftheinertialexciterwascarriedout,thedynamicmodeloftheharvestingsystemwasestablished,theinfluenceofworkingparametersandstructuralparametersonthevibrationamplitudewasobtained.Accordingtotheresultsoftheanalysis,blackcurrantharvestingprototypewasdeveloped,andfieldexperimentswerecarriedout.Theresultsshowedthattheharvester25couldcompletetheharvesting,collection,cleaningandtransportationoftheberriesatonetime,andtheworkefficiencywashigh,blackcurrantharvestingmechanizationinthefieldwasachieved.Undercertainagronomicrequirements,therecoveryrateofharvestingprototypewas89.9%,andthelossratewas8.9%,whichbasicallymeetstheproductionrequirement.Keywords:Blackcurrent;berry;harvester;harvesting300引言黑加仑(Ribesnigrum)学名黑穗醋栗(Blackcurrant),俗称黑豆果,具有独特的保健营养[1][2]价值,独特的鲜食风味,优良的加工性能等优点,栽培面积、产量逐年上升。但是目前我国黑加仑收获主要是手工采摘和手动采收器采收,劳动效率低,采收期七月中旬至八月初,35天气炎热,成熟期集中,劳动强度大,影响了栽培面积,因此解决小浆果的机械收获问题对扩大其栽培面积及减轻劳动强度有重要现实意义。[3][4]为了获得小浆果采收所需关键参数,国内外研究人员进行了大量研究。A.Torregrosaa,etal.以采收日期、激振频率、振动持续时间为因素,以主枝受力、采收率、果树损伤为评价指标,分别采用拖拉机悬挂式与手持式激振器对主枝激振进行了试验研究,获[5]40得较佳的采收参数。FábioLúcioSantos,etal.对二个品种的咖啡主枝在振幅3.75~7.50mm、[6]频率13.33~26.67Hz,以主枝各点加速度来判定咖啡采收效果,进行激振试验研究。王业成等人对黑加仑采收装置进行了试验优化研究,在振动频率945→1135rpm、振幅33→25mm、[7]激振相对位置0.60,此时黑加仑采收率可达95%以上,果枝需要的激振力小于4N。傅岩基金项目:高等学校博士学科点专项科研基金(20122325120010);国家自然科学基金(51205057)作者简介:王业成(1978-),男,副教授、硕导,主要研究方向L:现代农业装备.E-mail:6wyec@163.com-1-
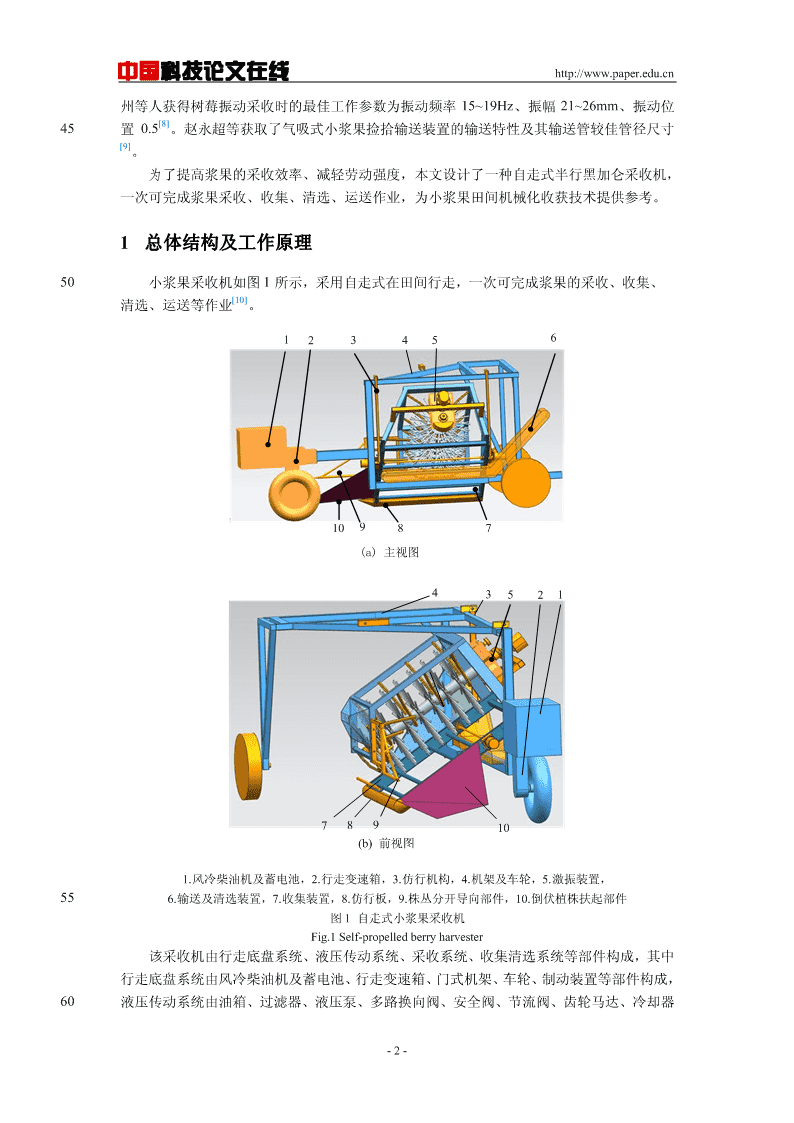
中国科技论文在线http://www.paper.edu.cn州等人获得树莓振动采收时的最佳工作参数为振动频率15~19Hz、振幅21~26mm、振动位[8]45置0.5。赵永超等获取了气吸式小浆果捡拾输送装置的输送特性及其输送管较佳管径尺寸[9]。为了提高浆果的采收效率、减轻劳动强度,本文设计了一种自走式半行黑加仑采收机,一次可完成浆果采收、收集、清选、运送作业,为小浆果田间机械化收获技术提供参考。1总体结构及工作原理50小浆果采收机如图1所示,采用自走式在田间行走,一次可完成浆果的采收、收集、[10]清选、运送等作业。12345666610987(a)主视图4352178910(b)前视图1.风冷柴油机及蓄电池,2.行走变速箱,3.仿行机构,4.机架及车轮,5.激振装置,556.输送及清选装置,7.收集装置,8.仿行板,9.株丛分开导向部件,10.倒伏植株扶起部件图1自走式小浆果采收机Fig.1Self-propelledberryharvester该采收机由行走底盘系统、液压传动系统、采收系统、收集清选系统等部件构成,其中行走底盘系统由风冷柴油机及蓄电池、行走变速箱、门式机架、车轮、制动装置等部件构成,60液压传动系统由油箱、过滤器、液压泵、多路换向阀、安全阀、节流阀、齿轮马达、冷却器-2-
中国科技论文在线http://www.paper.edu.cn等构成,采收系统由惯性激振装置、采收指、双向仿行机构、株丛分开导向部件、倒伏植株扶起部件等构成,收集清选系统包括浆果收集装置、输送装置、风机等构成。工作时,柴油机动力经过行走变速箱、前轮,带动采收机底盘在田间行走,每次田间行走可以完成半行灌木丛浆果的收获作业;液压传动系统采用各马达串联来传递柴油机动力,65采用节流阀与惯性激振器液压马达并联的方式来调节液压马达转速,进而调节激振频率;采收机前进作业时,倒伏植株扶起部件把倒伏、贴地的植株扶起,株丛分开导向部件把一行株丛分为二个半行,其中半行株丛喂入到采收系统中,随着浆果主枝移动和采收指绕主轴旋转,使得浆果主枝依次进入到各采收指之间;在惯性激振装置的带动下采收指绕主轴进行往复高频振动,使主枝、浆果产生往复振动,当浆果的惯性力大于果柄与浆果连接强度时,浆果脱70离果枝,完成采收过程;脱离果枝的浆果、叶片等下落到植株下侧的收集装置中,在收集输送带的提升作业下,浆果及叶片等被收集到输送装置中;在输送装置的作用下浆果、叶等被输送、提升到气吸清选装置中;叶等细小杂质在负压风力作用下经风道、风机返回田间,清选后的浆果下落的运输箱中,完成收集清选作业。该机采收系统采用采收指多点激振果枝,来实现振动采收。果枝单点激振可能在果枝端75部形成“辫梢”效应,并且果枝端部一般为刚生长的新枝,强度、刚度较弱,采收时容易在此产生较大弯曲变形和较大的位移,使果枝端部损伤、断裂,多点采收应保证果枝端部及时[7]喂入到采收指之间,通过采收指来限制果枝端部过大的弯曲变形,起到保护果枝作用。因此,多点激振方式相对单点激振方式可适当的增加振动强度,实现较高的采收率。为了保证浆果采收机具有较高的采收率和较低的损失率,采收系统应该与果树、地面之80间保持尽可能的较小距离,该采收机采用采收系统与地面上下仿行、与果树根部左右仿行的双自由度仿行机构,实现采收系统随着地面、果树根部的变化,保证与其距离。该仿行机构采用上下2杆、前后2杆来约束采收系统4个自由度,采收系统与地面上下方向仿行采用弹簧平衡采收系统的重量,减小仿行板对地面压力及前进阻力,提高仿行可靠性。2激振器的运动分析852.1激振器力学模型的简化惯性激振器由液压马达、同步带传动系统、2个偏心块、主轴及采收杆、弹簧限位结构等组成,其中2个偏心块相位差180°。该惯性激振器机构具有2个自由度,分别是液压马达及偏心块转动位移、采收指绕主轴转动位移。液压马达带动2个偏心块可等速同向旋转,使偏心块产生大小相等、方向相反、距离周期变化的惯性力,从而形成周期变化的惯性力偶,[11]90使采收杆绕主轴周期摆动,实现振动采收。当采收机匀速沿植株行间前进时,果枝喂入到采收系统内,进入到采收指之间,连续喂入的果枝对采收指一侧的作用力大于另一侧的作用力,使采收指绕主轴产生的宏观转动运动,从而实现果枝的连续的喂入、流出采收系统,实现机械化连续采收作业。激振器采用弹簧限位结构来避免在没有果枝喂入时,采收指及主轴在轴承传递较小扭矩95作用时产生高速旋转。同时,弹簧限位结构可以使激振器形成质量、弹簧系统,提高采收指的振动幅度。由于激振器的质量远大于果枝质量,忽略果树质量。激振器简化的力学模型如图2所示,设偏心块形心的偏心距为r、质量为m,采收指、主轴、机架等对转轴O的转动惯量为-3-
中国科技论文在线http://www.paper.edu.cnJO,主轴直径为rO,限位结构的弹簧刚度为k。mBrθωklArOφJOOω图2机构简化模型图Fig.2Mechanismsimplermodel1002.2系统方程的建立[12]采用拉格朗日方法建立系统微分方程,其形式如式(1)所示。dTTUDQi(i1,2,3n)(1)dtqqqqiii式中qi和qi—系统的广义坐标和广义速度n—系统的自由度T—系统的动能105U—系统的势能D—系统的能量散失函数Qi—广义激振力如图2所示,不考虑激振器的刚性位移,仅考虑系统的往复振动,激振器的力学模型具有2个自由度,选取偏心块相对采收机位置θ、采收指、主轴相对采收机的位置φ来确定系统的位置,规定转角θ、φ逆时针旋向为正向,其中偏心块转角θ由液压马达驱动,设马达、偏心块以匀角速ω转动。若偏心块以匀角速ω转动,角速度为已知量,则采收系统只有1101个独立变量,采用采收指转角φ来表示系统的动能T、势能U和能量散失函数D,如式(2)、式(3)、式(4)所示。T1J221m[(l)2(r)22lrcos](2)O2212Uk(3)0212Dc(4)02115其中:k02kr0以采收指转角φ为广义坐标,以为广义速度,将式(2)、式(3)、式(4)代入拉格朗日方程(1),可求出采收系统振动方程式22(JO2ml)c0k02ml0rsint(5)仅考虑方程稳态受迫振动,设其解为120Bsin(t)(6)0其中振幅B为-4-
中国科技论文在线http://www.paper.edu.cn22mlrsB(7)Jml2222O2(1s)(2s)ncO其中频率比s阻尼比2222OkrJoOml,O22kro(JO2ml)3田间试验1253.1试验材料如图3(a)所示,选用黑龙省农业科学研究院园艺分院试验站种植的黑加仑为样本,[13]试验日期为2015年7月5日。如图3(b)所示,选用牡丹江市横道河子镇道林村种植的黑加仑为样本,试验日期为2016[13]年7月12日。130(a)黑龙省农业科学研究院园艺分院试验站(b)牡丹江市横道河子镇道林村图3田间试验135Fig.3Fieldexperiment3.2试验方法如图3所示,试验装置采用自制的自走式小浆果采收样机,风冷式柴油机功率为6.3kW,振幅选取24mm,振动频率选取16Hz,多点位置激振。[8]试验选取采收率y1、损失率y2为采收器的性能指标,采收率y1、损失率y2分别按式(8)、140式(9)计算m1y100%(8)1mmm123-5-
中国科技论文在线http://www.paper.edu.cnmy2100%(9)2mmm123式中m1—进入采收箱中浆果的质量m2—未进入采收箱中,落入地面浆果的质量145m3—果枝上未落果的质量,不包括没有经济价值的小粒、绿粒3.3试验结果试验结果如表1所示,自走式小浆果采收机的在黑龙省农业科学研究院园艺分院试验站试验时获得的采收率y1均值为89.9%,损失率y2均值为8.9%,可基本满足生产要求。按行距2.4m,垄长50米,每垄需要准备收获时间为4min进行生产效率计算,则每公顷采收作150业过程需要时间仅为8小时。自走式小浆果采收机的在牡丹江市横道河子镇道林村试验时获得的采收率y1均值为49.4%,损失率y2均值为40.3%,不能满足生产要求。表1试验结果Tab.1Experimentalresult样本编号地点采收率y1/%损失率y2/%1园艺分院87.49.92园艺分院92.17.23园艺分院90.29.74道林村52.438.55道林村46.342.1自走式小浆果采收机可实现完全机械化采收,一次可完成浆果采收、收集、清选、运送等作业,作业效率高。对于果树上成熟的浆果,基本上可一次性实现采收作业,在试验中发现黑龙江种植的黑加仑定植行距一般为2~2.2m,穴距0.7~1.0m,每穴1~3株,主枝多155而密,光源和土地的利用率高,干枝丛的底面宽度大,方便人工冬季抗寒、人工采收,但[14]不便于机械化采收。由于干枝丛的底面宽度较大,影响了收集装置的收集浆果的位置,造成部分浆果落在干支从中间,造成过高的损失率。部分田间垄距过小,垄间植株搭界,影响采收机田间通过性,采收机不能进行采收作业。在道林村采收试验损失率过高,不能满足生产要求,这是由于果树在春季受到晚霜冻160害,植株相对较矮;同时由于行间穴距较大,以及品种关系,植株的干支是以穴从中心向外放射状的生长方式进行生长,尤其是干支与地面的向采收机前进方向的倒伏倾角过大,最终造成部分干支不能喂入到采收系统中,不能实现采收,还有一部分干支是在向前产生过大倾角的变形后喂入到采收系统中,使该部分干枝处于收集装置的边缘,浆果很容易掉落田间,造成损失率过高。因此,要解决小浆果机械化采收难题,要实现农机和农艺融合,165协同发展。为适应机械化采收的农艺要求,对果树的树高、树型、浆果在树枝上的结果区域、成熟期的一致性、主枝丛的底面宽度、主枝倒伏倾角、采收难易程度、产量、冬季耐寒性等指[14]标,严格的要求。应该针对现有种植模式增大行距,定植后株从相接而成带状,便于黑加仑机械采收。通过定期机械剪枝,缩小主枝丛的底面宽度,以减小采收时落果损失。解决170机械化采收时机器行走困难、浆果收集作业困难、果枝喂入量波动等问题。-6-
中国科技论文在线http://www.paper.edu.cn4结论设计了一种自走式黑加仑采收机,并对其惯性激振器进行了运动分析,建立了采收系统的动力学模型,获得了采收指振动幅度的数学方程。该采收样机可以一次可完成浆果采收、收集、清选、运送作业,作业效率高,可以实现黑加仑田间机械化收获作业;在一定的农艺175要求下,采收样机的采收率为89.9%,损失率为8.9%,基本可满足生产需求。[参考文献](References)[1]蓝峰,苏子昊,黎子明等.果园采摘机械的现状及发展趋势[J].农机化研究,2010,11(11):249-252.[2]宋洪伟,张冰冰,梁英海等.我国穗醋栗、树莓等小浆果资源研究与利用现状[J].吉林农业科学2011,36(5):56-58.180[3]R.A凯普纳等著.崔安,张德骏译.农业机械原理[M]北京:机械工业出版社,1978.514-526.[4]J.D.So.VibratoryHarvestingMachineforboxthorn(LyciumchinenseMILL)berry[J].TransactionsoftheASAE,2003,46(2):211-221.[5]A.Torregrosaa,E.Ortía,B.Martínb,MechanicalharvestingoforangesandmandarinsinSpain[J].BiosystemsEngineering,2009,104(9):18-24.185[6]FábioL.SantosI;DanielM.deQueirozII;,Frequencyandamplitudeofvibrationoncoffeeharvesting[J].RevistaBrasileiradeEngenhariaAgrícolaeAmbiental.2010,14(4):425-431.[7]王业成,陈海涛,林青.黑加仑采收装置参数的优化[J].农业工程学报,2009.25(3):79-83.[8]傅岩州,孙培灵,王业成.树莓振动采收工作参数的优化研究[J].农机化研究,2016,38(2):141-144.[9]赵永超,孔德刚,霍俊伟,王业成,何宇,张韵.气吸式小浆果捡拾输送装置仿真与试验[J].农业工190程学报,2016,32(17):32-39.[10]王海滨,郭艳玲,鲍玉东,等.振动式蓝莓采摘的机理分析与仿真[J].农业工程学报,2013,29(12):40-46.[11]汤智辉,孟祥金,沈从举等.机械振动式林果采收机的设计与试验研究[J].农业机械化研究,2010.8(8):65-69.195[12]王业成,袁威,陈海涛,付.便携式小浆果采收器,农业机械学报,2011.42(S1):181-183.[13]梁英海,李亚东等.黑穗醋栗成熟期间营养成分变化规律和适宜采收期研究[J].吉林农业大学报,2007,29(1):58-60.[14]睢薇,代志国,霍俊伟.黑豆果高效栽培技术[M].哈尔滨:黑龙江科技出版社,2004.-7-'
您可能关注的文档
- 阿霉素涂层输尿管支架的制备及药物释放行为的研究.pdf
- 零件加工一致性评价技术.pdf
- 面向众核负载聚集模式的Cache一致性协议研究综述.pdf
- 预补偿型反向训练模式下的01式跳空技术.pdf
- 高分辨率透射电镜碳烟图像量化分析方法研究.pdf
- 高压缩比天然气发动机爆震模拟及燃烧室优化.pdf
- 黄淮海平原区夏玉米倒伏特点及化控抗倒技术研究进展.pdf
- 黄芪甲苷对高胰岛素环境下肾小球系膜细胞的保护作用及其机制.pdf
- 黄连素激活TGR5、调节S1P2MAPK信号通路,抵抗高糖诱导的GMC中炎症纤维化成分的表达.pdf
- 黑龙江省农机合作社发展现状分析.pdf
- 鼎湖鳞伞菌丝体粗多糖的流变学特性研究.pdf
- 2016-2017年--小学校继续教育工作总结范文.doc
- 关于山东齐鲁师范学院2017年优秀人才招聘的通知范文.doc
- 关于投诉重庆--收藏品文化传播有限公司销售大量假冒收藏品的范文.doc
- 关于投诉重庆品渝轩售卖三无食品的情况汇报范文.doc
- 关于辽宁大连普兰店区教育文化体育局2017年所属自主招聘教师的通知范文.doc
- 关于面积超过144平房子的契税缴纳比例问题咨询范文.doc
- 写给重医附一院陈--的表扬信.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明