

- 316.43 KB
- 2022-04-22 11:52:00 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
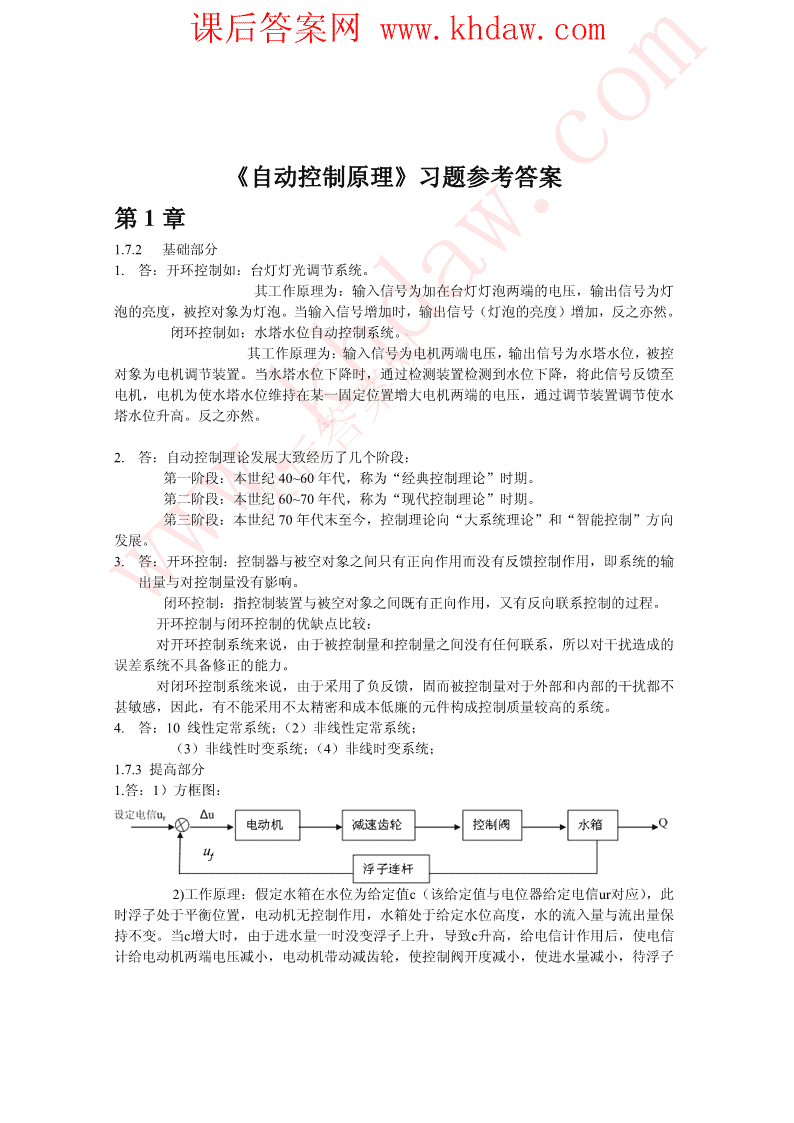
'课后答案网www.khdaw.com《自动控制原理》习题参考答案第1章1.7.2基础部分1.答:开环控制如:台灯灯光调节系统。其工作原理为:输入信号为加在台灯灯泡两端的电压,输出信号为灯泡的亮度,被控对象为灯泡。当输入信号增加时,输出信号(灯泡的亮度)增加,反之亦然。闭环控制如:水塔水位自动控制系统。其工作原理为:输入信号为电机两端电压,输出信号为水塔水位,被控对象为电机调节装置。当水塔水位下降时,通过检测装置检测到水位下降,将此信号反馈至电机,电机为使水塔水位维持在某一固定位置增大电机两端的电压,通过调节装置调节使水塔水位升高。反之亦然。2.答:自动控制理论发展大致经历了几个阶段:第一阶段:本世纪40~60年代,称为“经典控制理论”时期。第二阶段:本世纪60~70年代,称为“现代控制理论”时期。第三阶段:本世纪70年代末至今,控制理论向“大系统理论”和“智能控制”方向发展。3.答:开环控制:控制器与被空对象之间只有正向作用而没有反馈控制作用,即系统的输出量与对控制量没有影响。闭环控制:指控制装置与被空对象之间既有正向作用,又有反向联系控制的过程。开环控制与闭环控制的优缺点比较:对开环控制系统来说,由于被控制量和控制量之间没有任何联系,所以对干扰造成的误差系统不具备修正的能力。对闭环控制系统来说,由于采用了负反馈,固而被控制量对于外部和内部的干扰都不甚敏感,因此,有不能采用不太精密和成本低廉的元件构成控制质量较高的系统。4.答:10线性定常系统;(2)非线性定常系统;(3)非线性时变系统;(4)非线时变系统;1.7.3提高部分1.答:1)方框图:2)工作原理:假定水箱在水位为给定值c(该给定值与电位器给定电信ur对应),此时浮子处于平衡位置,电动机无控制作用,水箱处于给定水位高度,水的流入量与流出量保持不变。当c增大时,由于进水量一时没变浮子上升,导致c升高,给电信计作用后,使电信计给电动机两端电压减小,电动机带动减齿轮,使控制阀开度减小,使进水量减小,待浮子
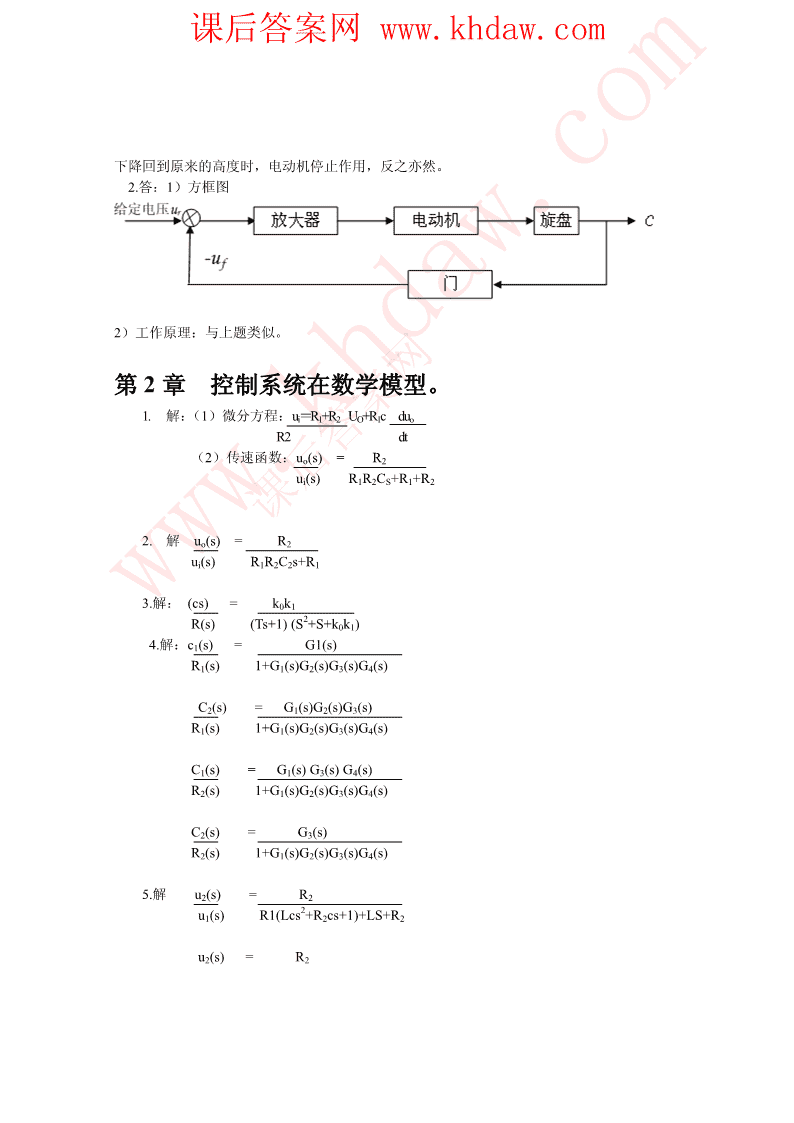
课后答案网www.khdaw.com下降回到原来的高度时,电动机停止作用,反之亦然。2.答:1)方框图2)工作原理:与上题类似。第2章控制系统在数学模型。1.解:(1)微分方程:ui=R1+R2UO+R1cduoR2dt(2)传速函数:uo(s)=R2ui(s)R1R2CS+R1+R22.解uo(s)=R2ui(s)R1R2C2s+R13.解:(cs)=k0k12R(s)(Ts+1)(S+S+k0k1)4.解:c1(s)=G1(s)R1(s)1+G1(s)G2(s)G3(s)G4(s)C2(s)=G1(s)G2(s)G3(s)R1(s)1+G1(s)G2(s)G3(s)G4(s)C1(s)=G1(s)G3(s)G4(s)R2(s)1+G1(s)G2(s)G3(s)G4(s)C2(s)=G3(s)R2(s)1+G1(s)G2(s)G3(s)G4(s)5.解u2(s)=R22u1(s)R1(Lcs+R2cs+1)+LS+R2u2(s)=R2
课后答案网www.khdaw.com2u1(s)R1Lcs+R1R2cs+R1+LS+R2微分方程:2R2u1=R1Lcdu2+(R1R2c+L)du2+(R1+R2)u2dt2dt提高部分:1.解:Y(s)=12Fi(s)ms+fs+k2.解:系统传速函数:C(s)=k1k2R(s)(T1s+1)(T2s+1)+k1k2+k2k33.解:1+G1(s)H1(s)+G2H2+G3u3+G2G3G4+G1(s)G2(s)H2H3C(s)=G1(s)G2(s)G3(s)R(s)1+G1(s)H1(s)+G2(s)H2(s)G3(s)H3(s)+G2(s)G3(s)G4(s)+G1(s)G2(s)H1(s)H3(s)4.解:C(s)=s(s+a-k)32R1(s)s+(a+3)s+3as+3k2C(s)=k(s+3s+3)32R2(s)s+(a+3)s+3as+3k5解:传速函数:C(s)=G1(s)G2(s)R(s)1+G1(s)H1(s)+G2(s)H2(s)+G1(s)G2(s)+G1(s)G2(s)G3(s)+G1(s)G2(s)H1(s)H2(s)第三章时域分析法3.7.2基础部分-40t-8t1.解c(t)=1+0.2e-1.2e(1)闭环传递函数:1.6s+320ф(s)=ss(++8)(s40)(2)单位脉冲函数:
课后答案网www.khdaw.com1.6s+320C(s)=ss(++8)(s40)2.解:1−tT/单位阶跃响应:C(t)=e(t≧0)T-t/T单位斜坡响应:C(t)=(t-T)+Te(t≧0)3.解:4开环传递函数为:G(s)=ss(4+)4闭环传递函数为:ф(s)=2ss++44-t则:单位阶跃响应为:h(t)=1-e(1-t)(t≧0)4.解:K开环传递函数:G(s)=ss(0.1+1)K闭环传递函数:ф(s)=ssK(0.1++1)1010100当K=10时,ф(s)===22ss(0.1++1)100.1ss++10ss++101002⎧Wn=⇒=100Wn10⎨⎩21ξξWn=⇒=00.5212−−0.5/1π则:δ00==ee−−πξ/1910021000=000πππt====pWdWn1−ξ221101−2当K=20时,可按同样的原理求取。5.解:(1)不稳定。(2)不稳定。(3)不稳定。(4)不稳定。
课后答案网www.khdaw.com6.解:D(s)=s(s+1)(s+2)+K2=s(s+3s+2)32=s+3s+2s+K使系统稳定的K的取值范围为:0<K<6。7.解:432D(s)=s+2s+2s+4s+2应用劳斯判据判断为:该系统不稳定,在s右半平面具有两个闭环极点。8.解:2⎧σ%15%=⇒e−−πξ1ξ100%15%=⇒=⎪⎨3.5⎪ts=⇒22=⇒=Wns⎩ξWn单位阶跃输入时,稳定误差:ess=01单位斜坡输入时,稳定误差:ess=2Wn3.7.3提高部分1.解:⎧K=0.9h⎨⎩K=1002.解:1系统的传递函数为:ф(s)=s+10(参考)3.解:2⎧ht()−∞h43−⎧33.3%=e−−πξ/1ξ100%p⎪δp%==100%100%=33.3%⎪⎧ξ=⎨⎨h()∞3⇒⇒π⎨⎪⎪=0.1=⎩Wn=t0.1Wn12⎩p⎩−ξ4.解:20010(1)G(s)==(ss++10)(2)(0.1ss++1)(0.51)121(s+1)7(s+3)3(2)G(s)==(4)(222)11ss++ss+28(ss+1)(ss++1)42
课后答案网www.khdaw.com6(5sss++10)30(2)6(0.5+1)(3)G(s)===2ss(++10)ss(10)s(0.1s+1)R111(1)输入为1(t)时,ess====1++Kp1101111输入为t时,ess=∞12输入为t时,ess=∞2(2)、(3)可按同样的原理求取。5.解:(1)系统在右半s平面根的个数为:2(2)虚根为s112=±2i;s3、4=±2i。6.解:40(S+20)(1)K=40时,系统在扰动作用下的稳定输出:C=系统在扰动作NS()SK+2040×+201用下的稳定误差:eSSN=0(2)系统总的输出量:C(s)=CR(S)+CN(S)240(sK++20)=(参考)2sK+××+2040201第四章轨迹分析法4.4.2基础部分1.解答:根轨迹又称为根迹,是指当系统的特征方程中某个参数(如K,T)连续地从零变化到无穷大时,特征方程的根连续发生变化时在S平面上所形成的若干条曲线。2.解:系统的开环零点、开环极点是已知的,通过建立开环零点、开环极点与闭环零点、闭Kszsz(−)(−−)...(sz)12m环极点的关系有助于系统根轨迹的绘制。由GsHs()()=闭环极(spspsp−−−)()...()12n点由开环前向通道传递函数的零点和反馈通道传递函数的极点组成。03.解答:180根轨迹方程:1+G(s)H(S)=0绘制根轨迹的相角条件:∠G(S)H(S)=π2k+v幅值条件:GsHs()()1=4.解:见书p73-p78。
课后答案网www.khdaw.com5.解:Ks*(+1)6.解:GsHs()()=ss(2++)(3s)327.解:D(s)=s+s+3s+ks+2kKs(2+)Ks(2+)则:开环传递函数为:GsHs()()==322ssss+23(23++ss+)则:根轨迹为:Ks*(++++2)Ks*(2)2*(Ks2)2*(Ks2)8.解:GsHs()()====2220.5ss++10.5(ss++22)(ss++22)(si+++−1)(si1)根轨迹为:
课后答案网www.khdaw.comKK**9.解:GsHs()()==2ss(+3)(s++2s2)ss(+3)(s++1is)(+−1i)π3π44−1.253π−π4−4Ks*(++2)Ks*(2)10.解:GsHs()()==2222(49ss++)(225si+−)(225s++i)根轨迹为:3ππ4425−253ππ−−444.4.3提高部分Ks(2+)1.解:Gs()=ss(1+)
课后答案网www.khdaw.com-2-101(1)分离点为:−22(2)特征方程为:D(s)=s+2s+ks+42=s+(2+k)+4当k=2时,复数特征根的实部为-2。2~10:略。应用根轨迹绘制规则绘制。Ks(1++)Ks(1)11.解:GsHs()()==21011ss++(si++39)(s+−39)i22根轨迹为:12~14:略。第5章频率特性分析法5.7.2基础部分1.解答:频率特性:又称频率响应,是指线性系统或环节,在正弦信号作用下,系统的稳态输出与输入之比对频率的关系。频率特性的表示方法:1)极坐标表示:Gj()()ω=∠AjωωGj()2)对数频率特性曲线表示:
课后答案网www.khdaw.comL()ω=20lgGj(ω)2.解答:奈奎斯特稳定判断:设系统开环传递函数有p个极点,则闭环系统稳定的主要条件为:当W由-∞→∞时,开环幅相特性曲线G(jω)逆时针包围(-1,j0)点(又称为临界点)的次数N=p;否则,闭环系统不稳定。若p=0,则仅当G(jω)曲线不包围(-1,j0)点时闭环系统稳定。+当开环传递函数G(s)含有v个积分环节时,应从强制的开环幅相特性曲线上ω=0对应o点处逆时针方向作v90,无穷大半径圆弧的辅助线,找到w=0时曲线G(jω)的起点,才能正确确定开环幅相特性曲线G(jω)官包围(-1,j0)点的角度。o3.解:幅值裕度h定为:幅相曲线上,相角为-180时对应幅值的倒数,公式如下:1h=nGj()()ωggHjω0相角裕度定义为:180加上开环幅相曲线幅值等于1时的相角,公式如下:oγ=+180∠GjHj(ωωcc)()2Gs()=4.解:(1)()ss+121(+)2⇒=Gj()ω()11++jjω(2ω)2=−()11jω(−2jω)22()11++ωω()422=−()13ω−jω22()11++ωω()423ωA()ω=ϕω()=arctg22241−ω2()11+++ω()41ωω+ω则:实频特性:UA(ω)=ωϕcos(ω)
课后答案网www.khdaw.com虚频特性:VA(ω)=(ωϕ)sin(ω)幅频特性:22AUV()ω=+()ωω()相频特性:V(ω)ϕω()=arctgU()ω(2)~(4)可按类似方法处理。5.解:系统的频率特性为:2(32+++gj)ω.2g3.2−ωGj()ω=()48++jjωω()6.解:(1)jj[G][G]0ω0ωjω[G]07.解:-40dB/decL(ω)/dBL(ω)/dB12ω-80dBdec00-100dB/dec
课后答案网www.khdaw.com(3)、(4)可按同样的方式处理。8.解:10Gs()=Gv()=+(s10)(a)s+20(b)(c)~(i)可按绘制由于幅频特性曲线的方式的反过程同样处理。9.解:由奈奎斯特稳定判据得知:(1)稳定;(2)不稳定;(3)稳定;(4)稳定。相角裕度计算方式:oγ=+180∠GjHj()ωωcc()10.略5.7.3提高部分1.解:同基础部分频率特性显以传递函数为基础的控制系统的分析方法。2.解:最小相位系统:指一个稳定的系统,其传递函数在右半s平面无零点。对于最小相位系统,传递函数分子和分母的最高次方均分别是m和n,则当频率趋于无穷时,两个系统的对数幅频曲线斜率为-20(n-m)dB/dec,但是其对数相频曲线不同,只有最o小相位系统显趋于-90(n-m)。3.略4~7略参见书事例题可解答。8.解:(1)不稳定;(2)稳定;(3)稳定;(4)不稳定。9~13略可参见书事例题材解答。第6章自动控制系统的校正本章答案为给出的校正方法,参见各方法,与对应的题型对应,即可达到求解的目的。频率响应校正方法:1.串联超前校正:利用超前网络的相位超前特性,正确地将截止频率置于超前网络交接频率1和1之间。αTT无源超前网络的设计步骤为:(1)根据稳态误差要求,确定开环增益K。
课后答案网www.khdaw.com(2)利用已确定的开环增益K,计算未校正系统的相应位置。(3)根据截止频率ω′′的要求,计算超前网络参数α和T,公式如下:c1T=ωαm⎧⎪−==L′′()()ωcc′Lωαc1.0lg⎪⎪⎨γϕγ′′=+mc()ω′′⎪α−1⎪ϕ=arctgm⎪⎩2α式中:ωmm,ϕα,,T为超前网络参数;γ(ωc′′)通常用估计方法给出,因此还需要进行下一步。(4)验收已校正系统的相位裕量和幅值裕量有时没有幅值裕量要求。(5)确定超前网络的参数值。2.串联滞后校正:利用滞后网络的高频幅值衰减特性使截止频率降低,从而使系统获得较大的相位裕量。设计步骤如下:(1)根据稳态误差要求,确定开环增益K。ωc′γ(2)利用已确定的开环增益,确定未校正系统的截止频率,相位裕量和幅值裕量20lghg。ω′′γ′′(3)选择不同的c计算或查找相位裕量,根据相位裕量要求,选择校正后系统的截止频ω′′率c。(4)确定滞后网络参数b和T。(5)验算系统的幅值裕量和相位裕量。计算公式为:⎧⎪γ′′=+γω()()cc′′ϕωc′′⎪⎨20lgbL+′′()ωc′=0⎪1⎪=0.1ω′′c⎩bT根轨迹校正
课后答案网www.khdaw.com1.串联超前校正:如果原系统具有不理想的动态特性且全部开环极点为实极点,则可以采用单级超前网络进行校正。设计步骤为:(1)根据系统的性能指标要求,确定希望闭环主导板点位置。(2)如果系统根轨迹不通过该希望闭环主导板点,则不能用调整增益法来实现。因此需按下式计算由超前网络产生的超前角ϕc:oϕ=−−180ϕc式中:mnϕ=∑∑∠−−∠−()(sz11jspi)j=11i=(3)确定超前网络的零极点位置。(4)验算性能指标要求。2.串联滞后校正设计步骤为:(1)确定希望闭环主导极点位置。o(2)由10夹角法确定滞后网络零点,并近似计算主导极点上的根轨迹增益。(3)根据稳态性能指标要求计算滞后网络参数。(4)根据相位条件验算希望得极点。第7章离散控制系统7.6.2其础部分−at1.解:(1):f()te=−1z⇒=F()z1−−aTze−−aTze−−z=−aTze−−aT−e=−aTZ−ef()tt=cosω(2):
课后答案网www.khdaw.comzz()−cosωt⇒=Fz()2zzT−+2cosω1t(3):f()ta=Tz⇒=Fz()za−−at(4):f(tt)=e−aTTze⇒=Fz()2−aT()ze−(5):f()tt=Tz⇒=Fz()2()z−1s+32.解:(1)Fs()=()ss++12()21=−ss++12zz⇒=Fz()2⋅−−−TT2ze−−ze−−2TTzze()22−−ze+=−−TT2()zeze−−()−−2TT22()zee−+=−−TT2()zeze−−()其余各题类似,(2)~(7)略。−Tze()1−3.解:(1)Fz()=−T()zz−−1()ezz=−−Tzz−−1e
课后答案网www.khdaw.comt⇒=f()t1−e(2)~(5)可按类似方法解题。4~9.题略。7.6.3提高部分1.解:X(z)与V(z)之间的脉冲传递函数为:X()zDzGzGz()1()h()=Uz()1+D()()()zGzGz1h−Ts1−e而Gs()=对Gs()求z变换得:Gz()hhh。s,X()zG1()()zGhzD(z)=故:Uz()1+GzGzDz1()()()h2~6.题可参见书上例题求解。第8章现代控制制理论初步8.4.2基础部分1.解:状态变量:�x=xx=xx=1921则:��x==xx12;����x==xu−−=−−32xxuxx32221则:状态方程为:�⎡⎤⎢x11⎥=+⎡01⎤⎡⎡⎤x0⎤u⎢⎥�⎢−−23⎥⎢⎢⎥x1⎥x⎣⎦⎣⎣⎦2⎦⎣⎦2输出方程:⎡x1⎤x=[]10⎢⎥⎣x2⎦
课后答案网www.khdaw.com2.解:(1):⎡⎤−−221⎡x1⎤⎡0⎤�⎢⎥⎢⎥⎢⎥x=−020xu+0⎢⎥⎢2⎥⎢⎥⎢⎥⎣⎦140−⎢⎣x⎥⎦⎢⎣1⎥⎦3根据能控性判别方法可知:⎡0⎤⎡−2210−−⎤⎡⎤⎡⎤1⎢⎥⎢⎥⎢⎥⎢⎥Β=0ΑΒ=02000−=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎣1⎥⎦⎢⎣14010−⎥⎢⎥⎢⎥⎦⎣⎦⎣⎦,⎡−−22112⎤⎡⎤⎡⎤−2⎢⎥⎢⎥⎢⎥ΑΒ=02000−=⎢⎥⎢⎥⎢⎥⎢⎣14001−⎥⎢⎥⎢⎥⎦⎣⎦⎣⎦−所以:⎡⎤012010−−2⎢⎥θ=ΒΑΒΑΒ=⎡⎤000,0010=⎣⎦⎢⎥⎢⎥⎣⎦101100−γ≠3anθ故系统状态不可控。(2)解:根据能控性判别方法可知:⎡⎤00⎡11000⎤⎡⎤⎡01⎤⎢⎥⎢⎥⎢⎥⎢⎥Β=01ΑΒ=01001=01⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦10⎢⎣01110⎥⎢⎦⎣⎥⎢⎦⎣01⎥⎦⎡11001⎤⎡⎤⎡02⎤2⎢⎥⎢⎥⎢⎥ΑΒ=01001=01⎢⎥⎢⎥⎢⎥⎢⎣01101⎥⎢⎦⎣⎥⎢⎦⎣02⎥⎦所以:
课后答案网www.khdaw.com⎡000102⎤2⎢⎥θ==⎡⎤BABAB010101⎣⎦⎢⎥⎢⎣100102⎥⎦θ=0∴γθ≠3,an故系统状态不可控。3.解:⎡⎤−−−122⎢⎥C=[110]CA=[]1100−=11[−131−−]⎢⎥⎢⎥⎣⎦101−⎡⎤−−−1222⎢⎥CA=−−−[]131011−=[050]⎢⎥⎢⎥⎣⎦101−所以:⎡⎤⎡C110⎤⎢⎥⎢⎥θθgC==A−131,−−≠g0⎢⎥⎢⎥2⎢⎣CA⎥⎢⎦⎣050⎥⎦所以:γθg=3ank,因此系统状态完全能观测。(2)方法一样。8.4.3提高部分解答方法:能控性判别方法:θ=ΒΑΒ[]⎡⎤C能观性判别方法:θg=⎢⎥⎣⎦CA−1系统传递函数:GsCSIA()=−()B'
您可能关注的文档
- 胡学龙《数字图像处理》习题答案.pdf
- 胡宏纹版《有机化学》课件及习题答案.pdf
- 胡庆康《现代货币银行学教程》3版)课后习题详解.pdf
- 胡汉才编著《理论力学》课后习题答案第4章习题解答.doc
- 胡汉才编著《理论力学》课后习题答案第5章习题解答.doc
- 胡裕树_《现在汉语》课后习题答案.doc
- 胡裕树《现代汉语》教材思考和练习参考答案(完整版).pdf
- 胡运权《运筹学教程》习题答案(第一章)[1].pdf
- 自动化制造系统复习题(有答案).docx
- 自动控制原理 第3章习题解答.pdf
- 自动控制原理 课后答案(孙亮 杨鹏 着) 北京工业大学出版社.pdf
- 自动控制原理(王万良)答案.pdf
- 原理_于希宁_课后习题答案.doc
- 胡寿松第5版_课后习题及答案_完整_.doc
- 自动控制原理及其应用部分习题解答.doc
- 自动控制原理第2版王划一课后习题答案.pdf
- 自动控制原理第3版答案 孙炳达主编.doc
- 自动控制原理第二版 冯巧玲 北航第一章习题及答案.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明