

- 292.32 KB
- 2022-04-22 11:52:12 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'课后答案网,用心为你服务!大学答案---中学答案---考研答案---考试答案最全最多的课后习题参考答案,尽在课后答案网(www.khdaw.com)!Khdaw团队一直秉承用心为大家服务的宗旨,以关注学生的学习生活为出发点,旨在为广大学生朋友的自主学习提供一个分享和交流的平台。爱校园(www.aixiaoyuan.com)课后答案网(www.khdaw.com)淘答案(www.taodaan.com)
《自动控制原理》(第2版)习题答案
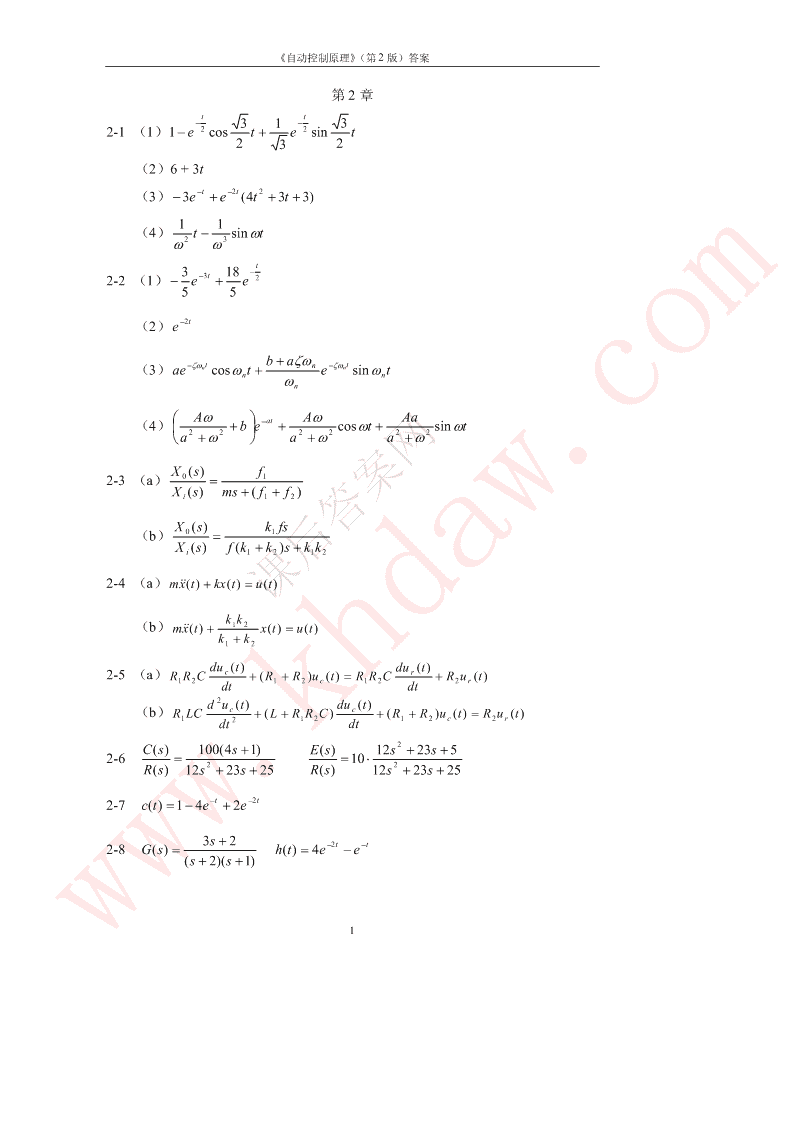
《自动控制原理》(第2版)答案第2章tt3132-1(1)1e2coste2sint232(2)6+3tt2t2(3)3ee4(t3t)311(4)tsint23t3t182-2(1)e3e2552t(2)e(3)aentcostbanentsintnnnAatAAa(4)becostsint222222aaaX(s)f012-3(a)X(s)ms(ff)i12X(s)kfs01(b)X(s)f(kk)skki12122-4(a)mx(t)kx(t)u(t)kk(b)()12()()mxtxtutkk12du(t)du(t)2-5(a)cr()RRC(RR)u(t)RRCRut1212c122rdtdt2du(t)du(t)(b)cc()()()RLC(LRRC)RRutRut121212c2rdtdt2C(s)1004(s)1E(s)12s23s52-61022R(s)12s23s25R(s)12s23s25t2t2-7c(t)14e2e3s22tt2-8G(s)h(t)4ee(s2)(s)11
《自动控制原理》(第2版)答案U(s)RCRs1c322-9(a)U(s)RC(RR)s1r123U(s)CRRs(RR)c1223(b)U(s)Rr1C(s)G1G22-10(a)R(s)1(GG)(GG)1234C(s)1(G1)G2(b)R(s)1G(HH)212C(s)G1G2G3G1H1G3(c)R(s)1GHGGHGGGGHGHGH21233123113133C(s)G1G22-11(a)R(s)1GG23C(s)G11(H)(b)R(s)1HGH1C(s)G2(G1G3)(c)R(s)1GHGGH22121C(s)G1G2G3G4G31(G1H1)2-12(a)R(s)1GHGHGGGHH(GH)(GH)1132123211132E(s)11(G3H2)G4G3H2H1R(s)1GHGHGGGHH(GH)(GH)1132123211132C(s)G1G22G1G2E(s)11(G1G2)(b)R(s)1GG3GGR(s)1GG3GG12121212C(s)G1G2E(s)11(G1G2H1)2-13(a)R(s)1GGGGHR(s)1GGGGH1212112121C(s)11(G1G2H1)G3G2E(s)11(G1G2H1)G3G2D(s)1GGGGHD(s)1GGGGH1212112121C(s)G2G4G3G4G1G2G4E(s)1G1G2G4(b)R(s)1GGGGR(s)1GGGG24342434C(s)G4E(s)G4D(s)1GGGGD(s)1GGGG243424342
《自动控制原理》(第2版)答案GGGGG123432-14(a)G(s)1GHGHGGGHGGH(GH)(GH)113212334331132GGGGGG123456(b)G(s)1GGHGGHGGH232341453(c)15.1abcded1(gb)(d)G(s)1afgbchehgf(af)(ch)3
《自动控制原理》(第2版)答案第3章带格式的:行距:多倍行距1.25字行6003-1G(s)=1.43n=24.5带格式的:缩进:首行缩s270s600进:2字符,行距:多倍行距1.25字行3-2=0.6n=2带格式的:字体:小四,降低量15磅%=9.48%tp=1.96tr=1.38ts=2.5带格式的:缩进:首行缩3-3=0.5n=1进:2字符带格式的:字体:小四,降%=16.3%tp=2.42tr=3.63ts=6低量14磅Ts1删除的内容:23-4(1)(s)KT1带格式的:字体:小四,降Ts12低量15磅带格式的:缩进:首行缩15(s)3进:21.75磅(2)(s)(s2)(s)5带格式的:行距:多倍行距1.25字行带格式的:缩进:首行缩4040进:7字符,行距:多(3)(s)倍行距1.25字行22(s)3.0.016s6.0s.025带格式的:字体:小四,降低量5磅3-5(1)=0.1n=5带格式的:缩进:首行缩进:7.5字符,行距:多c(t)1.1005e5.0tsin(.497t84.26)倍行距1.25字行带格式的:缩进:首行缩进:4字符,行距:多%=72.9%ts=6倍行距1.25字行=0.1n=10带格式的:行距:多倍行距1.25字行c(t)1.1005etsin(.994t84.26)带格式的:字体:小四,降低量5磅带格式的:字体:小四,降%=72.9%ts=3低量5磅=0.1n=1带格式的:缩进:首行缩进:1.5字符,行距:多1.0t倍行距1.25字行c(t)1.1005esin(.0994t84.26)带格式的:行距:多倍行距1.25字行%=72.9%ts=30带格式的:字体:小四,降低量5磅(2)=0.5n=5带格式的:字体:小四5.2t带格式的:缩进:首行缩c(t)1.1155esin(.433t60)进:0字符,行距:多倍行距1.25字行%=16.3%ts=1.2带格式的:行距:多倍行距1.25字行3-6(1)图1=0.1n=1%=72.9%ts=30带格式的:缩进:首行缩图2=0.5n=1%=20.2%ts=6.11进:0字符带格式的:字体:倾斜图3=0.0745n=0.745%=79.1%ts=54带格式的:字体:倾斜,下3-7(1)Kh=0.216标带格式的:缩进:首行缩101(Khs)10进:2字符(2)(s)(s)1222s1(10Kh)s10s1(10Kh)s10带格式的...[1]带格式的...[2](3)10.316.01510.0474带格式的:字体:小四n带格式的...[3]4
《自动控制原理》(第2版)答案带格式的:缩进:首行缩%=56.2%tp=1.006ts=6进:5字符,行距:多倍行距1.25字行%=18.4%tp=1.128ts=2带格式的:缩进:首行缩(4)原系统=0.158n=3.16%=60.5%tp=1.006ts=6进:1.5字符,行距:多倍行距1.25字行加入比例微分和速度反馈后,阻尼比增大,使系统超调量减小,响应速度加带格式的:缩进:首行缩快。进:2字符,行距:多倍行距1.25字行3-8图1和图2系统均是稳定的。带格式的:行距:多倍行距1.25字行3-9(1)系统稳定。带格式的:非上标/下标(2)系统不稳定,s右半平面有2个极点。带格式的:缩进:首行缩(3)系统不稳定,s平面虚轴上有2对共轭极点。进:24磅,行距:多倍行距1.25字行3-10(1)系统稳定。带格式的:行距:多倍行距(2)系统不稳定。1.25字行带格式的:缩进:首行缩(3)系统稳定。进:24磅,行距:多倍行距1.25字行(4)系统不稳定。带格式的:行距:多倍行距3-11(1)无解1.25字行(2)K>1.53带格式的:缩进:首行缩进:24磅,行距:多倍行(3)09时,有2个分离点带格式的:缩进:首行缩进:3.5字符,行距:多a=9时,有1个分离点倍行距1.25字行00.1带格式的:字体:倾斜带格式的:字体:倾斜118.18s6-8用串联滞后校正Gc(s)带格式的:字体:倾斜1165.29s带格式的:行距:1.5倍行距6-9(1)第3种校正装置带格式的:字体:小四,降低量12磅(2)采用第3种校正装置带格式的:字体:小四,降1低量17磅6-10KTTT112带格式的:字体:小四,降1低量31磅5.0(2s1)(2s1)(1.0s)1s1156-11Gc(s)21(s)1.0(05s)1s1306-12Gc(s)=0.0972s带格式的:下标6-13Gr(s)=1/G0(s)带格式的:字体:非倾斜,下标6-14(1)K=0.145(2)Gr(s)=0.5s12
《自动控制原理》(第2版)答案带格式的:字体:小四,降1s低量12磅6-15串联校正Gc(s)>T带格式的:字体:倾斜s带格式的:字体:倾斜带格式的:字体:小四复合校正Gr(s)=s/K带格式的:字体:非倾斜带格式的:字体:小四带格式的:居中13
《自动控制原理》(第2版)答案第7章带格式的:字体:小四kxxa7-1(a)y1带格式的:字体:小四k2x(k1k2)signaxa带格式的:字体:小四,降低量17磅(b)ykxbsignx域代码已更改带格式的:字体:小四,降低量5磅32带格式的:字体:小四7-2N(A)A4带格式的:字体:小四,降低量12磅7-3(a)分解为:死区继电器+死区特性带格式的:行距:1.5倍行距(b)分解为2个死区特性(c)等效为死区特性7-4第1个系统分析的精度高带格式的:字体:倾斜7-5(a)G1(1+H1)带格式的:下标带格式的:字体:倾斜GH11(b)带格式的:下标1G1带格式的:字体:小四,降低量15磅7-6(a)稳定系统带格式的:缩进:首行缩(b)不稳定的自振荡进:2字符,行距:1.5倍行距(c)稳定的自振荡带格式的:缩进:首行缩(d)不稳定的自振荡(离虚轴近的交点)进:24磅,行距:1.5倍行距稳定的自振荡(离虚轴远的交点)带格式的:行距:1.5倍7-7A=5.3=2行距带格式的:字体:倾斜7-8(1)非线性系统稳定时02带格式的:字体:倾斜非线性系统产生周期运动2/3e0稳定焦点=e<e0稳定焦点2111arcsin17-16稳定,emax=1AAA7-17略(A>a)7-18略线性部分7-19略5ksGs()2Jsskj5kGj()5kJ25k0时,JImGj0...[5]删除的内容:(此处有一个图)...[6]15
《自动控制原理》(第2版)答案删除的内容:第八章第8章带格式的:字体:小三(as)T删除的内容:采样系统Te8-1(1)E*(s)1e(as)T2带格式的:字体:小四删除的内容:aTzesinT(2)E*(s)删除的内容:aT2aT(ze)2zecosT1-at1)e(t)=te2Tz(zcosT2zcosT)(3)E*(s)22(z2zcosT)1*zzet()enTt()(8-2(1)n0aTz1zeaTaTze(zecosbT)(2)aT2aT(ze)2zecosbT1anTnTe(tnT)3T3TTze(ze)1n0(3)3T3(ze)12Tz(z)1sinT(4)22*anT(z2zcosT)1E()snTen03T1z1Tze1z(5)3T23T9z13(ze)9zezzz(6)5.05.0nTe()asnTz1zeTze2Tn0zTzz(z1T)(7)()asT22Te2Tsz1(z)1(z)1aTaTaTZ2(eZecos)wTabZesinwT(8)()*asTZeZbT()2ceZaT22ewaTos1Tw()2cZeZaTewaTosTeE(s)...[7]带格式的:字体:小四2Tz1(e)8-4(a)带格式的:缩进:首行缩T2进:0字符(z1)(ze)带格式的:字体:小四3带格式的:字体:小四,降z(b)低量15磅T(z1)(ze)带格式的:字体:小四带格式的:缩进:首行缩T进:2字符1e8-5(1)带格式的:字体:小四,降Tze低量15磅nT带格式的:缩进:首行缩(2)c(n)=1e进:2字符,行距:1.5倍行距带格式的:字体:小四16
《自动控制原理》(第2版)答案GG(z)R(z)GGR(z)GG(z)GGHR(z)GGH(z)GGR(z)1232123212328-6c(z)1GGH(z)12221TzTz8-71(z)22(z)1(z)1n1n18-8(1)c(n).025()1()34(n)31616nnn(2)c(n)(5.5)114()2(5.7)3nn(3)c(n)(4.0)2(3.0)31.0cos5.0n1.0sin5.0n8-9(1)闭环系统稳定(2)KGlim1z2pz11Kzlim1G()z0pTz112Kzlim1G()z0pTz1n(3)Cn()0.49910.213nn8-10(1)c(n).0125(n).0252.012541n1n(2)c(n)5.024368-11T<0.405时系统稳定-4T81e8-12kTs1k8.3-4T1eGGzDzDzRzGNz12()1()2()()2()8-13(1)CzCzCz()()()rn1(GGzDz)()1211(2)D(z)D1(z)包含(z1)项,增加系统型号。2GG(z)1212.01(3)1(z)zZ2s(s)1带格式的:行距:1.5倍8-140100a)AAA5ks线性部分Gs()2Jsskjk5Gj()25kJ25k0时,ImGj0J25k时,ImGj0J页15:[6]删除的内容番茄花园2010-6-2616:09:00
(此处有一个图)1与G()j无交点,所以系统总是稳定的。NA()7-12(1)由xAx,,12xxx得,x12xx21,(fxx,2)dxfxx()A21,2xdxAdx,所以121dxx121212xAxC(抛物线方程),CxAx0212122(图)(2)ee0令x12ex,e,得xxx22,ex2dxx22xxC所以1,所以21dxx12(3)由xx0得xxxxxx12,27-13xx20nnx=0.15,n=1,x(0)0,x(0)02dx2xxnn等倾线法dxx
无73-79页页16:[7]删除的内容番茄花园2010-6-2616:14:00-at1)e(t)=te*et()enTtnT()()n0anTnTe()tnTn0*anTnTsE()snTeen0()asnTnTen0()asT()asT2Te2Ts……()*asT2()asT3()asteET(s)e2Te……()aST*()asT3()ast()asT3[1eE](s)TeTeTe……-(a+s)TTe=-(a+s)T1-e-(a+s)T*TeEs()-(a+s)T2[1-e]'
您可能关注的文档
- 胡运权《运筹学教程》习题答案(第一章)[1].pdf
- 自动化制造系统复习题(有答案).docx
- 自动控制原理 (胡寿松 著) 科学出版社 课后答案.pdf
- 自动控制原理 第3章习题解答.pdf
- 自动控制原理 课后答案(孙亮 杨鹏 着) 北京工业大学出版社.pdf
- 自动控制原理(王万良)答案.pdf
- 原理_于希宁_课后习题答案.doc
- 胡寿松第5版_课后习题及答案_完整_.doc
- 自动控制原理及其应用部分习题解答.doc
- 自动控制原理第3版答案 孙炳达主编.doc
- 自动控制原理第二版 冯巧玲 北航第一章习题及答案.doc
- 自动控制原理第五版胡寿松主编课后习题答案详解.pdf
- 自动控制理论第四版课后习题详细解答答案(夏德钤翁贻方版).doc
- 自动控制理论课后习题答案(上).doc
- 自动控制理论课后习题详细解答答案(夏德钤翁贻方版).doc
- 自控习题答案(夏德岑 第三版).doc
- 自控原理习题答案(全).doc
- 自控原理习题答案(陈铁牛 版).doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明