

- 267.37 KB
- 2022-04-22 11:52:02 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
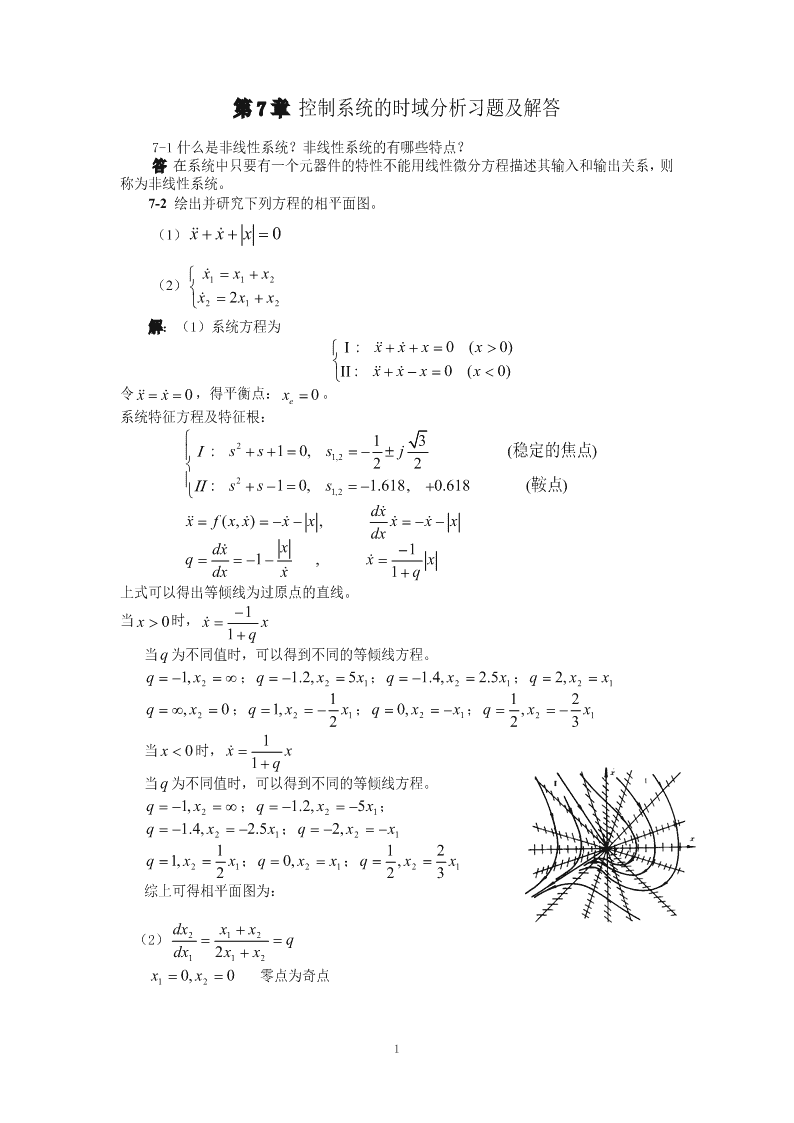
'第7章控制系统的时域分析习题及解答7-1什么是非线性系统?非线性系统的有哪些特点?答在系统中只要有一个元器件的特性不能用线性微分方程描述其输入和输出关系,则称为非线性系统。7-2绘出并研究下列方程的相平面图。(1)&x&+x&+x=0x&1=x1+x2(2)x&=2x+x212解:(1)系统方程为Ι:&x&+x&+x=0(x>0)ΙΙ:&x&+x&−x=0(x<0)令&&xx==&0,得平衡点:x=0。e系统特征方程及特征根:132Ι:1ss++=0,s=−±j(稳定的焦点)1,222ΙΙ:ss2+−=10,s=−1.618,+0.618(鞍点)1,2dx&&x&=f(x,x&)=−x&−x,x&=−x&−xdxdx&x−1q==−1−,x&=xdxx&1+q上式可以得出等倾线为过原点的直线。−1当x>0时,x&=x1+q当q为不同值时,可以得到不同的等倾线方程。q=−1,x=∞;q=−1.2,x=5x;q=−1.4,x=2.5x;q=2,x=x2212121112q=∞,x=0;q=1,x=−x;q=0,x=−x;q=,x=−x22121212231当x<0时,x&=x1+q当q为不同值时,可以得到不同的等倾线方程。q=−1,x=∞;q=−1.2,x=−5x;221q=−1.4,x=−2.5x;q=−2,x=−x2121112q=1,x=x;q=0,x=x;q=,x=x212121223综上可得相平面图为:dxx+x212(2)==qdx2x+x112x=0,x=0零点为奇点121
1−2q整理得:x=x21q−11−2q等倾线为过零点的直线,令p=则x=px,21q−1q=∞,x=−2x;q=5,x=−2.5x;q=2,x=−3x;212121q=1,x=−∞x;q=0.5,x=0x;2121p∞410.50-0.5-1-2-33/2q17/33/43/51/21/30∞2-1x=px21综上可得相平面图为:27-3已知非线性系统的微分方程式为&x&+0.5x&+2x+x=0,试求奇点,并绘制出相平面图。2dx&−0.5x&−2x−x解:求奇点。由题中微分方程:=dxx&2若x&=0,则有0.5x&+2x+x=0求得相轨迹的奇点分别为:(0,0)和(-2,0)。(2)在奇点(0,0)处泰勒级数展开:。故此奇点为稳定焦点。(3)分析在奇点处泰勒级数展开,令,由,,因此奇点为鞍点。图7-37-4如题7-4图所示得具有非线性反馈增益的二阶系统,在输出微分反馈回路中,非线性元件具有饱和特性。试在e−e&平面上画出具有代表性的相轨迹,以表示对各种条件的影响,假设K=5,J=1,a=1。解:c&&=5u;c&=v2
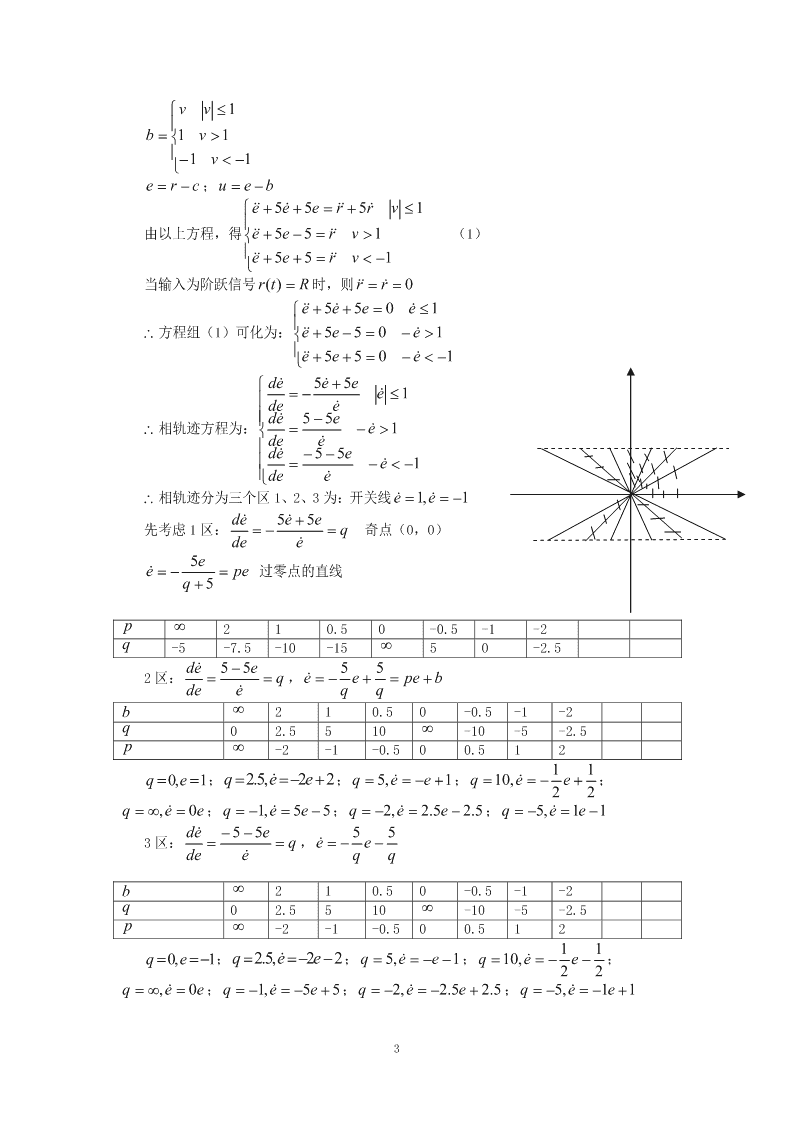
vv≤1b=1v>1−1v<−1e=r−c;u=e−be&&+5e&+5e=&r&+5r&v≤1由以上方程,得e&&+5e−5=&r&v>1(1)e&&+5e+5=&r&v<−1当输入为阶跃信号r(t)=R时,则&r&=r&=0e&&+5e&+5e=0e&≤1∴方程组(1)可化为:e&&+5e−5=0−e&>1e&&+5e+5=0−e&<−1de&5e&+5e=−e&≤1dee&de&5−5e∴相轨迹方程为:=−e&>1dee&de&−5−5e=−e&<−1dee&∴相轨迹分为三个区1、2、3为:开关线e&=1,e&=−1de&5e&+5e先考虑1区:=−=q奇点(0,0)dee&5ee&=−=pe过零点的直线q+5p∞210.50-0.5-1-2q-5-7.5-10-15∞50-2.5de&5−5e552区:==q,e&=−e+=pe+bdee&qqb∞210.50-0.5-1-2q02.5510∞-10-5-2.5p∞-2-1-0.500.51211q=0,e=1;q=2.5,e&=−2e+2;q=5,e&=−e+1;q=10,e&=−e+;22q=∞,e&=0e;q=−1,e&=5e−5;q=−2,e&=2.5e−2.5;q=−5,e&=1e−1de&−5−5e553区:==q,e&=−e−dee&qqb∞210.50-0.5-1-2q02.5510∞-10-5-2.5p∞-2-1-0.500.51211q=0,e=−1;q=2.5,e&=−2e−2;q=5,e&=−e−1;q=10,e&=−e−;22q=∞,e&=0e;q=−1,e&=−5e+5;q=−2,e&=−2.5e+2.5;q=−5,e&=−1e+13
7-5系统如题7-5图所示,假设系统仅受到初始条件作用,试画出e−e&平面上的相轨迹。解:微分方程为:e=−c&−cc&&=uMe>0u=−Me<0由上述方程得:e&=−c&&−c&=−u−c&当e=0,u&≠0,e&&=−u&−u当e≠0,u=常数,∴u&=0则有:Me<0e&&=−u=−Me>0所以开关线为e=0相轨迹方程:de&M2当e<0时,e&&=M,=,e&=Me+A,A是与初始条件或此区域内相轨迹起点11dee&相关的积分常数。曲线为顶点在−A/M,开口向右的抛物线。1de&M2当e>0时,e&&=−M,=−,e&=−Me+A,A是与初始条件或此区域内相轨迹22dee&起点相关的积分常数。曲线为顶点在A/M,开口向左的抛物线。1当e=0,u&≠0,e&&=−u&−ue&t0+t0+t0+设突变时刻为t,则e&&dt=−u&dt−udt0∫t0−∫t0−∫t0−e(t0+)u(t0+)t0+3∫de&=−∫du−∫udte(t0−)u(t0−)t0−t0+Qu跳跃有界,∴∫udt=0t0−e(t)−e(t)=−u(t)+u(),在t→t的0+0−0+t0−0−0+e时间段内∆u=±2M即−Me&>0-3∆e=Me&<0−5相轨迹图,设M=1,起点(0,-5)如图4
7-6试用相平面法分析如题7-6图所示系统。讨论在β=0,β<0及β>0三种情况下相轨迹的特点。解:线性部分的微分方程为:c&&=u非线性环节可表示为:Me>0u=−Me<0又因e=−(c+βc&)故M,c+βc&<0c&&=−M,c+βc&>0dc&dc&dcdc&由c&&===c&,根据上式得dtdcdtdc2c&=2Mc+A1,c+βc&<02c&=−2Mc+A,c+βc&>02这两个方程分别对应c−c&平面上开口向右,向左顶点在c轴上的两条抛物线。位置与初始条件及另一区域的相轨迹与开关线的交点有关。开关线为是:c+βc&=0(1)当β=0时,直线c=0为分界线,根据系统方程:2c&=2Mc+A1,c<02c&=−2Mc+A,c>02可得下图所示相轨迹。奇点在原点,为中心点。1(2)当β<0时,直线c+βc&=0即c&=−c的斜率为正,根据系统方程:β2c&=2Mc+A1,c+βc&<02c&=−2Mc+A,c+βc&>02可得右图所示相轨迹。奇点在原点,为不稳定的焦点。1(3)当β>0时,直线c+βc&=0即c&=−c的斜率为负,根据系统方程:β2c&=2Mc+A1,c+βc&<02c&=−2Mc+A,c+βc&>02可得右图所示相轨迹。奇点在原点,为稳定的焦点。β=0β<0β>07-7描述函数分析法的实质是什么?试述描述函数的概念及其求取方法。dx7-8某一非线性环节,其输入输出关系为:y=x+4x,试求出该环节的描述函dt数N(X)。5
解:根据其输入输出关系,可以将该环节看成是由一线性环节y=4x与一非线性环1dx节y=x并联而成,如(图7-8)所示。2dt由于线性环节的放大系数为4,所以该环节的描述函数N(X)=4。1dx非线性部分的输入输出关系为y=x。由此可以看出,输出y与输入x的变化方22dt向有关,因此这部分的描述函数N(X)将会是一复数。下面就来推出N(X)的具体形式。22x(t)=Xsintdx212y=x=Xsinωt⋅Xωcosωt=Xωsinωtcosωt=Xωsin2ωt2dt22ππ122A=y(t)cosωtdωt=Xωsin2ωtcosωtdωt1∫∫ππ00πππ2232223=∫Xω(sinωt−sinωt)dωt=∫∫Xωsinωtdωt−Xωsinωtdωtππ000n−1nsinxcosxn−1n−2根据积分公式:∫sinxdx=−+∫sinxdxnn2π2π22Xω1−2Xω4XωA=sinωtdωt=cosωt=1∫π33π3π002ππ1222B=y(t)sinωtdωt=Xωsinωtcosωtdωt1∫∫ππ00π223=∫Xω(cosωt−cosωt)dωtπ0n−1ncosxsinxn−1n−2根据积分公式:∫cosxdx=−+∫cosxdxnn2π2π2Xω1−2XωB=cosωtdωt=sinωt=01∫π33π006
B1A14XωN2(X)=+j=j⋅XX3π因此,本题所给的非线性环节的描述函数4Xω为:N(X)=N(X)+N(X)=4+j⋅123π7-9某非线性环节特性如题7-9图所示。试画出该环节在正弦输入下的输出波形,并求出其描述函数N(X)。解设输入x(t)=Xsinωt。图7-9所示非线性特性在正弦输入下的输出波形如图7-9a所示。其输入输出的数学函数式为:题7-9图非线性特性y(t)=Kx+C=KXsinωt+C(0<ωt<π)y(t)=Kx−C=KXsinωt−C(π<ωt<2π)输出y(t)是一周期函数,由于是奇函数,故有A=0。1根据π2π214B=y(t)sinωtdωt=[KXsinωt+C]sinωtdωt1∫∫ππ00π2π4KX114C=∫−cos2ωtdωt+∫2sinωtdωtπ22π00ππ2KX124C2=ωt−sin2ωt+[]−cosωtπ20π04C=KX+π式(7-5),有图7-9a输入输出波形代入式(8-7)可得上述非线性环节的描述函数为:B14CN(X)==K+(7-23)XπX由式(7-23)可以看出,该环节的特性相当于一个放大系数为K的线性环节与一个具有继电特性的非线性环节并联而成,如图7-9b所示。在该图中,若输入端作用一正弦函数x(t)=Xsinωt,其输出将等于两个环节输出的叠加,其中:图7-9b并联环节的描述函数故有:其y(t)波形与图8-9所示的相同。7
7-10试求如题7-10图所示非线性元件的描述函数。题7-10图kxx≤a1解:(a)由图可以看出:y=k2x−(k2−k1)ax>a令x=XsinωtX≥aa则拐点处对应角度为:α=ωt=arcsinX又Q输出y(t)是对称的奇函数k1Xsinωt,0<ωt≤a∴其数学表达式为:y(t)=πkXsinωt−(k−k)a,α<ωt≤2212∴A=01π12π4B=y(t)sinωtdωt=2y(t)sinωtdωt1∫0∫0ππ2a2a=kX+(k−k)(a1−()+Xarcsin)212πXX∴描述函数为:22A1+B1A12aa2aN(X)=∠(arctan)=k+(k−k)(1−()+arcsin)212XBπXXX1(X>a)π若Xa令x=XsinωtX≥aa则拐点处对应α=ωt=arcsinX又Q输出y(t)是对称的奇函数8
00<ωt≤a∴其数学表达式为:y(t)=πkXsinωt+(M−ka)α<ωt≤2A=01π42kXa4M2kaa2B=2y(t)sinωtdωt=kX+arcsin+−1−()1∫π0πXππX∴描述函数为:4M2kaa2aN(X)=+k−(1−()+arcsin)(X≥a)πXπXXX若Xω=6N(X)max有两种办法:1)改变G(jω)——调整K,K(−5ω)πReG(jω)|=|>−ω=642ω=6ω(ω+13ω+36)6K<15.722)改变N(A):调整死区继电器特性的死区a或输出幅值M−1πa−2=−0.5,u"≥1,u=2;则系统的结构图化为:12e>2从而1u=0e≤21−2e<−24Mh2812∴N(X)=1−()=1−()πXXπX2X1πX1∴−=−⋅N(X)8121−()2X13
11当X→0.5时−=−∞;当x→∞时−=−∞;N(X)N(X)d1(−)=0得X=2/2dXN(X)1πhπ可知当X=2/2处极值为−=−=−N(X)2M8X=2/210又QG(jω)=2jω(1+jω)o−1o令∠G(jω)=−90−2tgω=−180,得ω=1,G(jω)=5ω=11∴当ω=1时,G(jω)交负实轴于−5处,从而G(jω)曲线与−曲线的交点为:N(x)(-5,j0)121600(1±0.99)令−=−5,求得X=2,则X1=12.71,X2=0.9N(x)2π稳定的自持振荡的频率为ω=1,幅值为X=12.7214'
您可能关注的文档
- 胡宏纹版《有机化学》课件及习题答案.pdf
- 胡庆康《现代货币银行学教程》3版)课后习题详解.pdf
- 胡汉才编著《理论力学》课后习题答案第4章习题解答.doc
- 胡汉才编著《理论力学》课后习题答案第5章习题解答.doc
- 胡裕树_《现在汉语》课后习题答案.doc
- 胡裕树《现代汉语》教材思考和练习参考答案(完整版).pdf
- 胡运权《运筹学教程》习题答案(第一章)[1].pdf
- 自动化制造系统复习题(有答案).docx
- 自动控制原理 (胡寿松 著) 科学出版社 课后答案.pdf
- 自动控制原理 课后答案(孙亮 杨鹏 着) 北京工业大学出版社.pdf
- 自动控制原理(王万良)答案.pdf
- 原理_于希宁_课后习题答案.doc
- 胡寿松第5版_课后习题及答案_完整_.doc
- 自动控制原理及其应用部分习题解答.doc
- 自动控制原理第2版王划一课后习题答案.pdf
- 自动控制原理第3版答案 孙炳达主编.doc
- 自动控制原理第二版 冯巧玲 北航第一章习题及答案.doc
- 自动控制原理第五版胡寿松主编课后习题答案详解.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明