

- 914.01 KB
- 2022-04-22 11:52:15 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
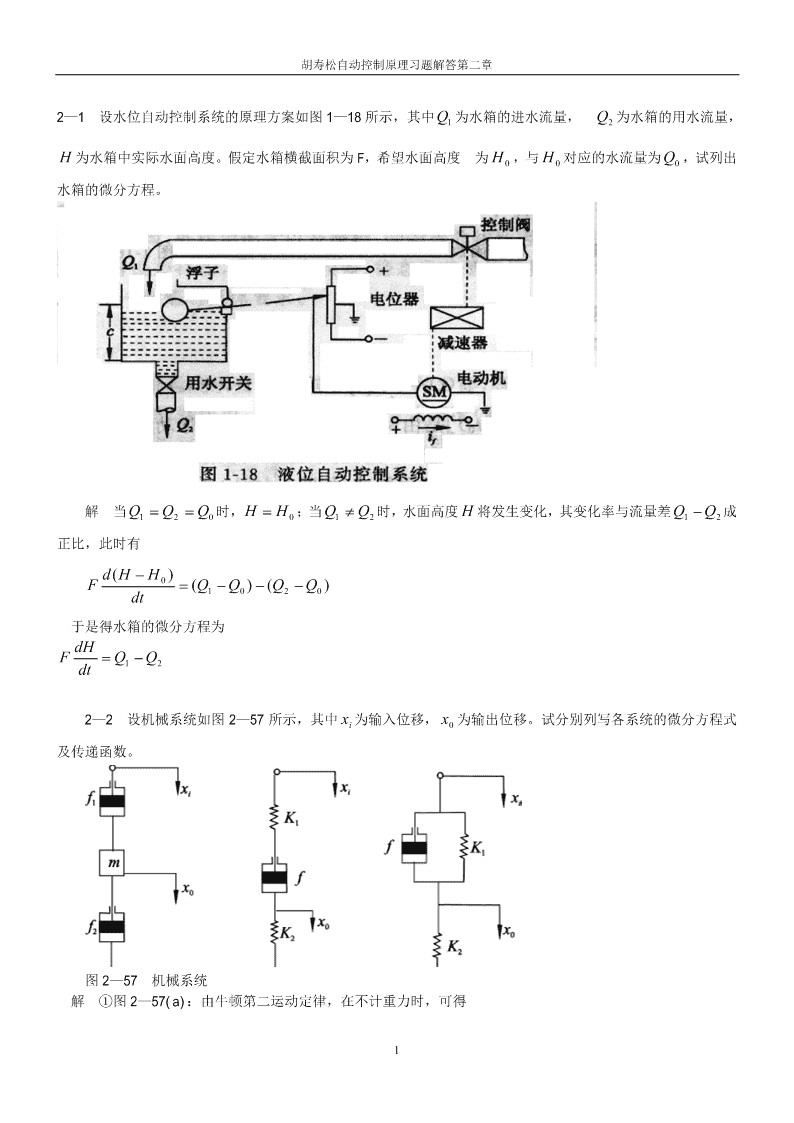
'胡寿松自动控制原理习题解答第二章2—1设水位自动控制系统的原理方案如图1—18所示,其中Q为水箱的进水流量,Q为水箱的用水流量,12H为水箱中实际水面高度。假定水箱横截面积为F,希望水面高度为H,与H对应的水流量为Q,试列出000水箱的微分方程。解当Q=Q=Q时,H=H;当Q≠Q时,水面高度H将发生变化,其变化率与流量差Q−Q成12001212正比,此时有d(H−H)0F=(Q−Q)−(Q−Q)1020dt于是得水箱的微分方程为dHF=Q−Q12dt2—2设机械系统如图2—57所示,其中x为输入位移,x为输出位移。试分别列写各系统的微分方程式i0及传递函数。图2—57机械系统解①图2—57(a):由牛顿第二运动定律,在不计重力时,可得1
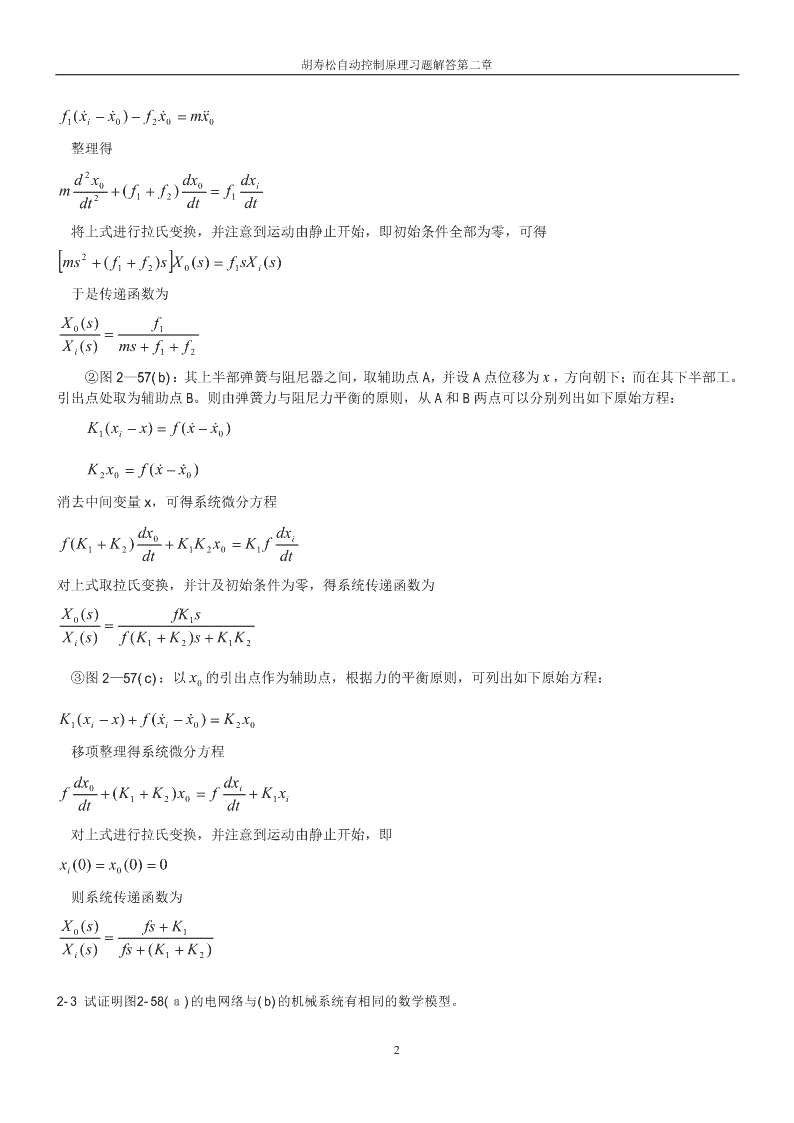
胡寿松自动控制原理习题解答第二章f(x&−x&)−fx&=m&x&1i0200整理得2dxdxdx00im+(f+f)=f2121dtdtdt将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[2]ms+(f1+f2)sX0(s)=f1sX(s)i于是传递函数为X(s)f01=X(s)ms+f+fi12②图2—57(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。引出点处取为辅助点B。则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:K(x−x)=f(x&−x&)1i0Kx=f(x&−x&)200消去中间变量x,可得系统微分方程dxdx0if(K+K)+KKx=Kf121201dtdt对上式取拉氏变换,并计及初始条件为零,得系统传递函数为X(s)fKs01=X(s)f(K+K)s+KKi1212③图2—57(c):以x的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:0K(x−x)+f(x&−x&)=Kx1ii020移项整理得系统微分方程dxdx0if+(K+K)x=f+Kx1201idtdt对上式进行拉氏变换,并注意到运动由静止开始,即x(0)=x(0)=0i0则系统传递函数为X(s)fs+K01=X(s)fs+(K+K)i122-3试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。2
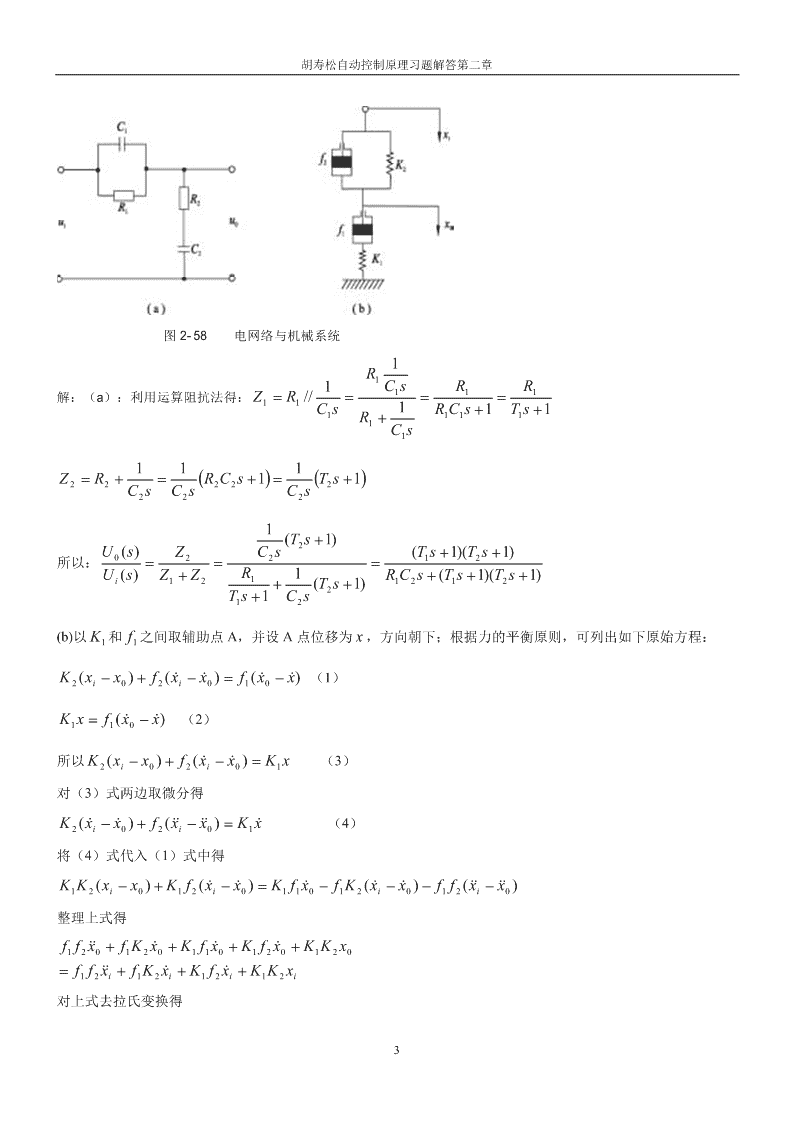
胡寿松自动控制原理习题解答第二章图2-58电网络与机械系统 1R11CsRR111解:(a):利用运算阻抗法得:Z=R//===11Cs1RCs+1Ts+11R+1111Cs1111Z=R+=()RCs+1=()Ts+122222CsCsCs2221(Ts+1)2U(s)ZCs(Ts+1)(Ts+1)02212所以:===Ui(s)Z1+Z2R1+1(Ts+1)R1C2s+(T1s+1)(T2s+1)2Ts+1Cs12(b)以K和f之间取辅助点A,并设A点位移为x,方向朝下;根据力的平衡原则,可列出如下原始方程:11K(x−x)+f(x&−x&)=f(x&−x&)(1)2i02i010Kx=f(x&−x&)(2)110所以K(x−x)+f(x&−x&)=Kx(3)2i02i01对(3)式两边取微分得K(x&−x&)+f(&x&−&x&)=Kx&(4)2i02i01将(4)式代入(1)式中得KK(x−x)+Kf(x&−x&)=Kfx&−fK(x&−x&)−ff(&x&−&x&)12i012i011012i012i0整理上式得ff&x&+fKx&+Kfx&+Kfx&+KKx120120110120120=ff&x&+fKx&+Kfx&+KKx12i12i12i12i对上式去拉氏变换得3
胡寿松自动控制原理习题解答第二章[2]ffs+(fK+Kf+Kf)s+KKX(s)12121112120[]2=ffs+(fK+Kf)s+KKX(s)12121212i所以:ffff12212s+(+)s+12KKKKX0(s)f1f2s+(f1K2+K1f2)s+K1K21212==2fffffXi(s)f1f2s+(f1K2+K1f1+K1f2)s+K1K212s2+(1+2)s+1+1KKKKK12122ff12(s+1)(s+1)KK12=fff121(s+1)(s+1)+KKK122所以图2-58(a)的电网络与(b)的机械系统有相同的数学模型。2—4试分别列写图2-59中个无源网络的微分方程式。解:(a):列写电压平衡方程:duuCCu−u=ui=Ci=i0CCR1dtR1duud(u−u)u−uCCi0i0u=(i+i)R=C+R=C+R0CR1222dtRdtR11整理得:duRduR02i2CR+C+1u=CR+Cu202idtRdtR11(b):列写电压平衡方程:duC1u−u=u(1)i=C(2)i0C1C11dtu+iRudud(u−iR)C1C1C1C20C1i=+i=+2i=C=C(3)C2C1C122RRdtdt4
胡寿松自动控制原理习题解答第二章ud(u−iR)C10C1即:+2i=C(4)C12Rdt将(1)(2)代入(4)得:2u−ud(u−u)dudui0i00C1+2C=C−CCR12122Rdtdtdt22uudududududui0i00i0即:−+2C−2C=C−CCR+CCR112122122RRdtdtdtdtdt整理得:22duduuduudu000iiiCCR+(C+2C)+=CCR++2C122211221dtdtRdtRdt2-5设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。 (1)2x&(t)+x(t)=t;解:对上式两边去拉氏变换得:11142(2s+1)X(s)=1/s→X(s)==−+22s(2s+1)ss2s+1−0.5t运动模态e1−t所以:x(t)=t−2(1−e2)(2)&x&(t)+x&(t)+x(t)=δ(t)。解:对上式两边去拉氏变换得:211(s+s+1)X(s)=1→X(s)==22(s+s+1)(s+1/2)+3/43−t/2运动模态esint22−t/23所以:x(t)=esint32(3)&x&(t)+2x&(t)+x(t)=1(t)。解:对上式两边去拉氏变换得:2111111(s+2s+1)X(s)=→X(s)===−+222ss(s+2s+1)s(s+1)ss+1(s+1)5
胡寿松自动控制原理习题解答第二章−t运动模态e(1+t)−t−t−t所以:x(t)=1−e−te=1−e(1+t)2-6在液压系统管道中,设通过阀门的流量满足如下流量方程:Q=KP式中K为比例常数,P为阀门前后的压差。若流量Q与压差P在其平衡点(Q,P)附近作微小变化,试导出线性化00方程。解:设正常工作点为A,这时Q=KP00在该点附近用泰勒级数展开近似为:df(x)y=f(x0)+(x−x0)dxx0即Q−Q=K(P−P)010dQ11其中K1==KdPP=P02P02-7设弹簧特性由下式描述:1.1F=12.65y其中,是弹簧力;是变形位移。若弹簧在变形位移附近作微小变化,试推导的线性化方程。解:1.1设正常工作点为A,这时F=12.65y00在该点附近用泰勒级数展开近似为:df(x)y=f(x0)+(x−x0)dxx0即F−F=K(y−y)010dF0.10.1其中K==12.65×1.1y=13.915×1.1y100dyy=y02-8设晶闸管三相桥式全控整流电路的输入量为控制角,输出量为空载整流电压,它们之间的关系为:e=Ecosαdd0式中是整流电压的理想空载值,试推导其线性化方程式。解:设正常工作点为A,这时E=Ecosαdd006
胡寿松自动控制原理习题解答第二章在该点附近用泰勒级数展开近似为:df(x)y=f(x0)+(x−x0)dxx0即e−Ecosα=K(α−α)dd00s0ded其中Ks==−Ed0sinα0dαα=α−2t−t2-9若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应c(t)=1−e+e,试求系统的传递函数和脉冲响应。 解:对输出响应取拉氏变换的:2111s+4s+21C(s)=−+=因为:C(s)=Φ(s)R(s)=Φ(s)ss+2s+1s(s+1)(s+2)s2s+4s+2s12所以系统的传递函数为:Φ(s)==1+=1−+(s+1)(s+2)(s+1)(s+2)s+1s+2−t−2t系统的脉冲响应为:g(t)=δ(t)−e+e2-10设系统传递函数为C(s)2=2R(s)s+3s+2且初始条件c(0)=-1,c&(0)=0。试求阶跃输入r(t)=1(t)时,系统的输出响应c(t)。解:由系统的传递函数得:2dc(t)dc(t)+3+2c(t)=2r(t)(1)2dtdt对式(1)取拉氏变换得:2sC(s)−sc(0)−c&(0)+3sC(s)−3c(0)+2C(s)=2R(s)(2)将初始条件代入(2)式得21(s+3s+2)C(s)+s+3=2s22−s−3s22s+6142即:C(s)==−=−+22s(s+3s+2)ss+3s+2ss+1s+2−t−2t所以:c(t)=2−4e+2e7
胡寿松自动控制原理习题解答第二章2-11在图2-60中,已知和两方框相对应的微分方程分别是dc(t)6+10c(t)=20e(t)dtdb(t)20+5b(t)=10c(t)dt且初始条件均为零,试求传递函数C(s)/R(s)及E(s)/R(s)解:系统结构图及微分方程得:2010G(s)=H(s)=6s+1020s+52010E(s)1010C(s)10G(s)6s+10====2010R(s)1+G(s)H(s)2010R(s)1+G(s)H(s)1+1+6s+1020s+56s+1020s+5210(20s+5)(6s+10)1200s+1500s+500200(20s+5)200(20s+5)====(6s+10)(20s+5)+200120s2+230s+2502(6s+10)(20s+5)+200120s+230s+2502-12求图2-61所示有源网络的传递函数1R01C0sR0解:(a)Z=R//==T=RC00000Cs1Ts+10R+00Cs08
胡寿松自动控制原理习题解答第二章U(s)RR011=−=−(Ts+1)0U(s)ZRi001R01C0sR0(b)Z=R//==T=RC00000Cs1Ts+10R+00Cs01Ts+11Z=R+=T=RC11111CsCs11U(s)Z101=−=−(Ts+1)(Ts+1)10U(s)ZRCsi0011Ts+12Z=R//(R+)=R//12121CsCs22Ts+12(c)R1CsR(Ts+1)212==T=RC222R+T2s+1T2s+R1+11Cs2U(s)ZRTs+101212=−=−U(s)RRTs+R+1i00212-13由运算放大器组成的控制系统模拟电路如图2-62所示,试求闭环传递函数Uc(s)/Ur(s)。 图2-62控制系统模拟电路 U(s)ZU(s)ZU(s)R112202解:=−(1)=−(2)=−(3)U(s)+U(s)RU(s)RU(s)R0i01020式(1)(2)(3)左右两边分别相乘得9
胡寿松自动控制原理习题解答第二章U(s)ZZR0122=−即U(s)+U(s)RRR0i00033U(s)+U(s)RU(s)R0i0i0=−1+=−U(s)ZZRU(s)ZZR012201223U(s)Ri0所以:=−−1U(s)ZZR0122R11R2U0(s)1Z1Z2R2T1s+1C2s=−=−=−33R1Ui(s)R0R0+Z1Z2R2R3+1R+102Z1Z2R2T1s+1C2sRR12=−3(Ts+1)CsR+RR120122-14试参照例2-2给出的电枢控制直流电动机的三组微分方程式,画出直流电动机的结构图,并由结构图等效变换求出电动机的传递函数Ω(s)/U(s)和Ω(s)/M(s)mamc解:由公式(2-2)、(2-3)、(2-4)取拉氏变换U(s)−E(s)aa=I(s)E(s)=CΩ(s)aaemLs+RaaCI(s)=M(s)mamM(s)−M(s)mc=Ω(s)mJs+fmm得到系统结构图如下:McUa(s)1Ia(s)CMm1Ωm(s)mLas+RaJms+fm-Ce10
胡寿松自动控制原理习题解答第二章Cm1Ω(s)Ls+RJs+fCmaammm==Ua(s)1+CeCm1(Las+Ra)(Jms+fm)+CeCmLs+RJs+faamm1Ω(s)Js+fLs+Rmmmaa==Mc(s)1+CeCm1(Las+Ra)(Jms+fm)+CeCmLs+RJs+faamm2-15某位置随动系统原理方块图如图2-63所示。已知电位器最大工作角度o,功率放大级放大系数为K3,要θ=330max求: (1)分别求出电位器传递系数K0、第一级和第二级放大器的比例系数K1和K2; (2)画出系统结构图; (3)简化结构图,求系统传递函数θ(s)/θ(s)。0i图2-63位置随动系统原理图 解:15V3020(1)K=K==3K==200121651010(2)θ(s)=θ(s)−θ(s)U(s)=Kθ(s)U(s)=KKKU(s)ei0s0ea12ssU(s)=RI(s)+LsI(s)+E(s)M(s)=CI(s)aaaaabmma2Jsθ(s)+fsθ(s)=M(s)−M(s)E(s)=Kθ(s)00mcbb0系统结构图如下:11
胡寿松自动控制原理习题解答第二章Mc-θiθeUsUa1Mm1θ0K0K1K2KsCm2Las+RaJs+fs--Ebθ0Kb(3)系统传递函数θ(s)/θ(s)0iCms(Ls+R)(Js+f)aaKKKK012sCKKKKKCmb012sm1+θ(s)s(Ls+R)(Js+f)s(Ls+R)(Js+f)+CK0aaaamb==θi(s)Cm1+K0K1K2KsCms(Ls+R)(Js+f)s(Ls+R)(Js+f)+CKaaaamb1+KKKK012sCKmb1+s(Ls+R)(Js+f)aaKKKKC012sm=s(Ls+R)(Js+f)+CK+KKKKCaamb012sm2-16设直流电动机双闭环调速系统的原理线路如图2-64所示:要求(1)分别求速度调节器和电流调节器的传递函数(2)画出系统结构图(设可控硅电路传递函数为K/(τs+1);电流互感器和测速发电机的传递函数分别为33K和K;直流电动机的结构图用题2-14的结果);4512
胡寿松自动控制原理习题解答第二章(3)简化结构图,求系统传递函数Ω(s)/U(s)i解:(1)速调1R+1U(s)ZCsRCs+1Ts+1ST11111====U(s)−U(s)RRRCsRCsif11流调1R+2U(s)ZCsRCs+1Ts+1LT22222====U(s)−U(s)RRRCsRCsSTdlfk22(2)系统结构图如下:K4Mc-ULT-UiT1s+1USTT2s+1K3Ua1Mm1ΩRC1sRCsτ3s+1Cm2Las+RaIaJms+fm--EbUfCeK5(3)简化结构图,求系统传递函数Ω(s)/U(s)i因为求系统传递函数Ω(s)/U(s),所以令M=0,系统结构图如下:icK4-ULTUiT1s+1USTT2s+1K3Ua11ΩRC1sRCsτ3s+1Cm2Las+RaIaJms+fm--EbUfCeK5将K4后移到输出Ω,系统结构图化简如下:Jms+fmK4Cm-ULTUiT1s+1USTT2s+1K3Ua11ΩRC1sRCsτ3s+1Cm2Las+RaIaJms+fm--EbUfCeK513
胡寿松自动控制原理习题解答第二章进一步化简得:Jms+fmK4Cm-ULTUiT1s+1USTT2s+1K3UaCΩmRC1sRC2sτ3s+1(Las+Ra)(Jms+fm)+CeCm-UfJms+fmK5进一步化简得:UiTs+1K2(Ts+1)Ω13Cm2RC1sCm{RC2s[(Las+Ra)(Jms+fm)+CeCm](τ3s+1)}+K3K4Cm(Jms+fm)(T2s+1)-UfK5进一步化简得:Ui2(Ts+1)(Ts+1)K3Cm21Ω2RC1s{Cm{RC2s[(Las+Ra)(Jms+fm)+CeCm](τ3s+1)}+K3K4Cm(Jms+fm)(T2s+1)}+K5K3Cm(T2s+1)(T1s+1)所以:Ω(s)=U(s)i2KC(Ts+1)(Ts+1)3m21{}{}[]2RCsCRCs(Ls+R)(Js+f)+CC(τs+1)+KKC(Js+f)+KKC(Ts+1)(Ts+1)1m2aammem334mmm53m212-17已知控制系统结构图如图2-65所示。试通过结构图等效变换求系统传递函数C(s)/R(s)。 14
胡寿松自动控制原理习题解答第二章图2-65题2-17系统结构图 解:(a)R(s)C(s)G1(s)G2(s)-G2(s)G3(s)R(s)C(s)G1(s)-G2(s)G2(s)G3(s)15
胡寿松自动控制原理习题解答第二章R(s)1C(s)G1(s)+G2(s)1+G2(s)G2(s)C(s)G1+G2所以:=R(s)1+GG23(b)C(s)R(s)G1(s)G2(s)H1(s)1+H1(s)H2(s)C(s)R(s)G1(1+H1H2)G2(s)1+H1H2-G1H1C(s)G1G2(1+H1H2)所以:=R(s)1+HH−GH1211(c)G3R(s)C(s)G2G11+G2H1-H2G3R(s)C(s)G2G11+G2H1-G1H216
胡寿松自动控制原理习题解答第二章R(s)C(s)G2G1+G31+G2H1+G1G2H2C(s)G2(G1+G3)所以:=R(s)1+GH+GGH21122(d)H2/G3-R(s)C(s)G1G2G3--H3H2H2/G1G3R(s)-G3C(s)G1G21+G3H3-H2H2/G1G3R(s)-GC(s)3G1G21+G1H11+G3H3C(s)G1G2G3所以:=R(s)(1+GH)(1+GH)+GH113322(e)R(s)C(s)G1G2G3-H2+H1/G3H1/G3G417
胡寿松自动控制原理习题解答第二章R(s)C(s)G1G2G31+G2G3H2+H1G2H1/G3G4R(s)C(s)G1G2G31+G2G3H2+H1G2-G1G2H1G4C(s)G1G2G3所以:=G+4R(s)1+GGH+HG−GGH23212121(f)H1G1-R(s)C(s)G1G2G3R(s)G2C(s)G1+G31+G1G2H1C(s)(G1+G3)G2所以:=R(s)1+GGH1212-18试简化图2-66中的系统结构图,并求传递函数C(s)/R(s)和C(s)/N(s)。18
胡寿松自动控制原理习题解答第二章C(s)解:(1)求时,N=0这时结构图变为:R(s)RCG1G2--H1RCG1G2-1+G1G2H1C(s)G1G2所以:=R(s)1+GGH+GG12112C(s)(2)求时,R=0这时结构图变为:N(s)N-CG3G2G1-H1-进一步化简得19
胡寿松自动控制原理习题解答第二章N-CG3G2--G1H1G1再进一步化简得:N-G2CG31+G1G2H1-G1再进一步化简得:N-G2CG31+G1G2H1-1+G1G2H1G1G2再进一步化简得:20
胡寿松自动控制原理习题解答第二章N-G2CG31+G1G2H1-1+G1G2H1G1G2再进一步化简得:NG2G3-1-G1G2H1G2C1+G1G2H1G2+G1(1+G1G2H1)C(s)G2(G2G3−1−G1G2H1)所以:=R(s)(1+GGH)[G+G(1+GGH)]12121121图2-66题2-18系统结构图 解:C(s)(1)求时,N=0这时结构图变为:R(s)GG21RCG2G4-G321
胡寿松自动控制原理习题解答第二章G1G2RCG2+G3G4-G1G2RCG2+G3G4-G2+G3RG4CG1G2+G2+G31+G4(G2+G3)C(s)G4(G1G2+G2+G3)所以:=R(s)1+G(G+G)423C(s)(2)求时,R=0这时结构图变为:N(s)NCG2G4-G3NCG4-G2+G3C(s)G4所以:=R(s)1+G(G+G)42322
胡寿松自动控制原理习题解答第二章23
胡寿松自动控制原理习题解答第三章3-1设随动系统的微分方程为:T&x&+x&=Ku002u=K[r(t)−x]1fTx&+x=xfff0其中T,Tf,K2为正常数。如果在外作用r(t)=1+t的情况下,使x对r(t)的稳态误差不大于正0常数ε,试问k1应满足什么条件?0见习题3-20解答3-2设系统的微分方程式如下: (1)0.2c&(t)=2r(t)(2)0.04c&&(t)+0.24c&(t)+c(t)=r(t)试求系统的单位脉冲响应k(t)和单位阶跃响应h(t)。已知全部初始条件为零。解:(1)因为0.2sC(s)=2R(s)单位脉冲响应:C(s)=10/sk(t)=10t≥02单位阶跃响应h(t)C(s)=10/sh(t)=10tt≥02R(s)(2)(0.04s+0.24s+1)C(s)=R(s)C(s)=20.04s+0.24s+1125−3t单位脉冲响应:C(s)=k(t)=esin4t20.04s+0.24s+13251s+6单位阶跃响应h(t)C(s)==−22s[(s+3)+16]s(s+3)+16−3t3−3th(t)=1−ecos4t−esin4t43-3已知系统脉冲响应如下,试求系统闭环传递函数Φ(s)。 −1.25t(1)k(t)=0.0125e0(2)k(t)=5t+10sin(4t+45)−t/3(3) k(t)=0.1(1−e)解:0.0125(1)Φ(s)=s+1.251
胡寿松自动控制原理习题解答第三章00(2)k(t)=5t+10sin4tcos45+10cos4tsin4554s5s+4Φ(s)=+52+52=+5222222ss+16s+16ss+160.10.1(3)Φ(s)=−ss+1/33-4已知二阶系统的单位阶跃响应为−1.2toh(t)=10−12.5esin(1.6t+53.1)试求系统的超调量σ%、峰值时间tp和调节时间ts。1−ξωnt2解:h(t)=1−esin(1−ξωt+β)n21−ξ−πξ/1−ξ2π3.5β=arccosξσ%=et=t=ps1−ξ2ωξωnn0ξ=cosβ=cos53.1=0.6222−πξ/1−ξ−π0.6/1−0.6−π0.6/1−0.6σ%=e=e=e=9.5%ππt===1.96(s)p1−ξ2ω1.6n3.53.5t===2.92(s)sξω1.2n3-5设单位反馈系统的开环传递函数为0.4s+1G(s)=s(s+0.6)试求系统在单位阶跃输入下的动态性能。解:闭环传递函数0.4s+1G(s)s(s+0.6)0.4s+1G(s)===B0.4s+121+G(s)s+s+11+s(s+0.6)10.4s+10.41C(s)=G(s)R(s)==+B222ss+s+1s+s+1s(s+s+1)0.41s+11s+0.6=+−=−222s+s+1ss+s+1ss+s+12
胡寿松自动控制原理习题解答第三章−0.5t32×0.6−0.5t3c(t)=1−ecost−esint232−0.5t30=1−1.22esin(t+55.3)21−ξωnt2h(t)=1−esin(1−ξωt+β)n21−ξ−πξ/1−ξ2π3.5β=arccosξσ%=et=t=ps1−ξ2ωξωnn0ξ=cosβ=cos55.3=0.5692−πξ/1−ξσ%=e=11.37%ππ×2t===3.63sp231−ξωn3.53.5t===7ssξω0.5n3-6已知控制系统的单位阶跃响应为−60t−10th(t)=1+0.2e−1.2e试确定系统的阻尼比ζ和自然频率ωn。解:求拉氏变换得10.21.2(s+60)(s+10)0.2s(s+10)1.2s(s+60)H(s)=+−=+−ss+60s+10s(s+60)(s+10)s(s+60)(s+10)s(s+60)(s+10)2600600ωn===222s(s+60)(s+10)s(s+70s+600)s(s+2ξωs+ω)nn2ωn显然闭环传递函数为22(s+2ξωs+ω)nn27其中ω=600ω=1062ξω=70ξ=nnn26根据(3-17)e−t/T1e−t/T12h(t)=1++T/T−1T/T−12112解:根据公式(3-17)3
胡寿松自动控制原理习题解答第三章tt−−eT1eT2h(t)=1++T/T−1T/T−1211211T=T=1222ω(ξ−ξ−1)ω(ξ+ξ−1)nn11显然:T=T=12106011+1−22Tξ+ξ−1ξ71==6=解方程得ξ=Tξ−ξ2−112621−1−2ξ112由T==得到ω(ξ−ξ−1)=101nω(ξ−ξ2−1)10n101010×26所以ω====106nξ−ξ2−17492−−126243-7设图3-42是简化的飞行控制系统结构图,试选择参数K1和Kt,使系统ωn=6、ζ=1。 图3-42飞行控制系统解:系统开环传递函数25K1s(s+0.8)25K1G(s)==01+25K1Kss(s+0.8)+25K1Ktsts(s+0.8)225Kω1n==s(s+0.8+25KK)s(s+2ξω)1tn236ω=36=25KK=n11254
胡寿松自动控制原理习题解答第三章142ξω=0.8+25KK=12所以K=n1tt453-8试分别求出图3-43各系统的自然频率和阻尼比,并列表比较其动态性能。r(t)1c(t)r(t)1c(t)r(t)1c(t)21+s22SSS---+S(b)(a)+(c)图3-43控制系统解:(a)ω=1ξ=0系统临界稳定。ns+1(b)Φ(s)=ω=1ξ=0.5σ%=29.8%t=7.51s2nss+s+1s+1(c)Φ(s)=ω=1ξ=0.5σ%=16.3%t=8.08s2nss+s+13-9设控制系统如图3-44所示。要求: 图3-44控制系统 (1)取τ1=0,τ2=0.1,计算测速反馈校正系统的超调量、调节时间和速度误差; (2)取τ1=0.1,τ2=0,计算比例-微分校正系统的超调量、调节时间和速度误差。解:(1)系统开环传递函数102s(s+1)10(1+τ1s)10ωnG(s)=(1+τs)===011+10τ2ss(s+1)+10τ2ss(s+2)s(s+2ξωn)s(s+1)21ω=10ω=102ξω=2ξ=nnn102−ξπ/1−ξσ%=e=35.1%5
胡寿松自动控制原理习题解答第三章3.5t==3.5ssξωnK=5V(2)3-10图3-45所示控制系统有(a)和(b)两种不同的结构方案,其中T>0不可变。要求:(1)在这两种方案中,应如何调整K,K和K,才能使系统获得较好的动态性能。123比较说明两种结构方案的特点。解:3-11已知系统特征方程为4323s+10s+5s+s+2=0试用劳思稳定判据和赫尔维茨判据确定系统的稳定性。解:列劳思表如下:4s3523s101247s21011530s−0470s2由劳思表可以得到该系统不稳定。3-12已知系统特征方程如下,试求系统在s右半平面的根数及虚根值。5432(1)s+3s+12s+24s+32s+48=065432(2)s+4s−4s+4s-7s-8s+10=05432(3)s+3s+12s+20s+35s+25=0解:(1)列劳思表如下:5s112324s324483s4162s12481s0s有一对虚根,系统不稳定(2)列劳思表如下:6
胡寿松自动控制原理习题解答第三章6s1−4−7105s44−84s−5−5103s2s1s0s系统不稳定(3)列劳思表如下:5s112354s3202531680s332s5251s100s25有一对虚根,系统不稳定3-13已知单位反馈系统的开环传递函数K(0.5s+1)G(s)=2s(s+1)(0.5s+s+1)试确定系统稳定时的K值范围。解:系统特征方程为2s(s+1)(0.5s+s+1)+K(0.5s+1)=0将上述方程化简得到:4320.5s+1.5s+2s+(1+0.5K)s+K=0劳思表如下:4s0.52K3s1.51+0.5K22.5−0.25KsK1.5212.5−1.25K−0.125Ks2.5−0.25K0sK3-14已知系统结构图如图3-46所示。试用劳思稳定判据确定能使系统稳定反馈参数τ的取值范围。7
胡寿松自动控制原理习题解答第三章解:系统开环传递函数为101s(s+1)s+11010s+10G(s)=(1+)==010s32sτss(s+1)+10τss+(1+10τ)s1+s(s+1)系统特征方程为:32s+(1+10τ)s+10s+10=0劳思表如下:3s1102s1+10τ10110τs1+10τ0s10所以能使系统稳定反馈参数τ的取值范围为τ>03-15已知单位反馈系统的开环传递函数 100(1)G(s)=(0.1s+1)(s+5)50(2)G(s)=s(0.1s+1)(s+5)10(2s+1)(3)G(s)=22s(s+6s+100)2试求输入分别为r(t)=2t和r(t)=2+2t+t时,系统的稳态误差。 解:(1)因为是二阶系统,且系数大于零,所以系统稳定。2K=limG(s)=20K=limsG(s)=0K=limsG(s)=0pVas→0s→0s→0R2所以当r(t)=2t时e==∞ssKV2R1R2R3当r(t)=2+2t+te=++=∞ss1+KKKpVa8
胡寿松自动控制原理习题解答第三章(2)应先检查系统的稳定性。2K=limG(s)=∞K=limsG(s)=10K=limsG(s)=0pVas→0s→0s→0R2所以当r(t)=2t时e==0.2ssKV2R1R2R3当r(t)=2+2t+te=++=∞ss1+KKKpVa(3)应先检查系统的稳定性。2K=limG(s)=∞K=limsG(s)=∞K=limsG(s)=0.1pVas→0s→0s→0R2所以当r(t)=2t时e==0ssKV2R1R2R3当r(t)=2+2t+te=++=20ss1+KKKpVa3-16已知单位反馈系统的开环传递函数 50(1)G(s)=(0.1s+1)(2s+1)K(2)G(s)=2s(s+4s+200)10(2s+1)(4s+1)(3)G(s)=22s(s+2s+10)试求位置误差系数Kp,速度误差系数Kv,加速度误差系数Ka。 解:(1)应先检查系统的稳定性。2K=limG(s)=50K=limsG(s)=0K=limsG(s)=0pVas→0s→0s→0(2)应先检查系统的稳定性。K2K=limG(s)=∞K=limsG(s)=K=limsG(s)=0pVas→0s→0200s→0(3)应先检查系统的稳定性。2K=limG(s)=∞K=limsG(s)=∞K=limsG(s)=1pVas→0s→0s→03-17设单位反馈系统的开环传递函数为G(s)=1/Ts。试用动态误差系统法求出当输入信2号分别为r(t)=t/2和r(t)=sin2t时,系统的稳态误差。9
胡寿松自动控制原理习题解答第三章3-18设控制系统如图3-47所示。其中K1G(s)=K+F(s)=psJs输入r(t)以及扰动n(t)和n(t)均为单位阶跃函数。试求:12(1)在r(t)作用下系统的稳态误差(2)在n(t)作用下系统的稳态误差1(3)在n(t)和n(t)同时作用下系统的稳态误差12解:(1)在r(t)作用下系统的稳态误差这时系统的开环传递函数为:Ks+KpG(s)=G(s)F(s)=02Js系统位置误差系数为K=limG(s)=∞Ps→0R1在r(t)作用下系统的稳态误差e==0ssr1+Kp(2)在n(t)作用下系统的稳态误差1这时系统的开环传递函数为:Ks+KpG(s)=G(s)F(s)=02Js系统位置误差系数为K=limG(s)=∞Ps→0R1在n(t)作用下系统的稳态误差e==01ssn11+Kp(3)在n(t)和n(t)同时作用下系统的稳态误差1210
胡寿松自动控制原理习题解答第三章n(t)作用下系统的稳态误差2这时系统的开环传递函数为:Ks+KpG(s)=G(s)F(s)=02Js系统位置误差系数为K=limG(s)=∞Ps→0R1在n(t)作用下系统的稳态误差e==02ssn21+Kp所以在在n(t)和n(t)同时作用下系统的稳态误差为12e=e+e=0+0=0ssnssn1ssn23-19设闭环传递函数的一般形式为mm−1G(s)bms+bm−1s+L+b1s+b0Φ(s)==nn−11+G(s)H(s)s+as+L+as+an−110误差定义取e(t)=r(t)−c(t)。试证:(1)系统在阶跃信号输入下,稳态误差为零的充分条件是:b=a,b=0(i=1,2,L,m)00i(2)系统在斜坡信号输入下,稳态误差为零的充分条件是:b=a,b=a,b=0(i=2,3,L,m)0011i解:(1)系统在阶跃信号输入下这时mm−111bms+bm−1s+L+b1s+b0R(s)=C(s)=R(s)Φ(s)=nn−1sss+as+L+as+an−110mm−111bms+bm−1s+L+b1s+b0E(s)=R(s)−C(s)=−nn−1sss+as+L+as+an−110mm−11bms+bm−1s+L+b1s+b0=1−nn−1ss+as+L+as+an−110nn−1mm−11(s+as+L+as+a)−(bs+bs+L+bs+b)n−110mm−110=nn−1ss+as+L+as+an−110nn−1mm−11(s+as+L+as)−(bs+bs+L+bs)+(a−b)n−11mm−1100=nn−1ss+as+L+as+an−110e=lime(t)=limsE(s)sst→∞s→011
胡寿松自动控制原理习题解答第三章nn−1mm−1(s+as+L+as)−(bs+bs+L+bs)+(a−b)n−11mm−1100=limnn−1s→0s+as+L+as+an−110如果e=0则a=b且a≠0ss000(2)系统在斜坡信号输入下这时mm−111bms+bm−1s+L+b1s+b0R(s)=C(s)=R(s)Φ(s)=22nn−1sss+as+L+as+an−110mm−111bms+bm−1s+L+b1s+b0E(s)=R(s)−C(s)=−22nn−1sss+as+L+as+an−110mm−11bms+bm−1s+L+b1s+b0=21−nn−1ss+as+L+as+an−110nn−1mm−11(s+as+L+as+a)−(bs+bs+L+bs+b)n−110mm−110=2nn−1ss+as+L+as+an−110nn−12mm−121(s+as+L+as)+−(bs+bs+L+bs)+(a−b)s+(a−b)n−12mm−121100=2nn−1ss+as+L+as+an−110e=lime(t)=limsE(s)=sst→∞s→0nn−12mm−121(s+as+L+as)+−(bs+bs+L+bs)+(a−b)s+(a−b)n−12mm−121100lim=s→0ssn+asn−1+L+as+an−110如果e=0则a=ba=b且a≠0ss001103-20设随动系统的微分方程为2dc(t)dc(t)T+=Ku(t)122dtdtu(t)=K[r(t)−b(t)]1db(t)T+b(t)=c(t)2dt其中,T1、T2和K2为正常数。若要求r(t)=1+t时,c(t)对r(t)的稳态误差不大于正常数ε0,试问K1应满足什么条件? 已知全部初始条件为零。解:由上述方程得到拉氏变换如下:2K2(Ts+s)C(s)=KU(s)C(s)=U(s)122Ts+s1U(s)=K[R(s)−B(s)]112
胡寿松自动控制原理习题解答第三章1(Ts+1)B(s)=C(s)B(s)=C(s)2Ts+12由此得到系统结构图如下:R(s)U(s)K2C(s)K1s(T1s+1)-B(s)1T2s+1系统闭环传递函数为:KK12s(Ts+1)KK(Ts+1)1122Φ(s)==1+K1K2s(T1s+1)(T2s+1)+K1K2s(Ts+1)(Ts+1)1211s+1当r(t)=1+t时R(s)=+=22ssss+1KK(Ts+1)122C(s)=R(s)Φ(s)=2ss(Ts+1)(Ts+1)+KK1212s+1s+1K1K2(T2s+1)E(s)=R(s)−C(s)=−22sss(Ts+1)(Ts+1)+KK1212s+1K1K2(T2s+1)=21−ss(Ts+1)(Ts+1)+KK1212s+1s(Ts+1)(Ts+1)+KK−KK(Ts+1)1212122=2ss(Ts+1)(Ts+1)+KK1212s+1(Ts+1)(Ts+1)−KKT12122=ss(Ts+1)(Ts+1)+KK1212e=lime(t)=limsE(s)=sst→∞s→0(Ts+1)(Ts+1)−KKT12122lim(s+1)s→0s(Ts+1)(Ts+1)+KK1212(Ts+1)(Ts+1)−KKT12122=lims→0s(Ts+1)(Ts+1)+KK12121−KKT122=≤ε0KK12所以13
胡寿松自动控制原理习题解答第三章1≤K1K(T+ε)220系统特征方程为:32s(Ts+1)(Ts+1)+KK=TTs+(T+T)s+s+KK=01212121212劳思表如下:3sTT1122sT+TKK1212T+T−KKTT1121212s0T+T120sKK12如果系统稳定,则T+T−KKTTT+T12121212>0即K<1T+TKTT12212所以1T+T12≤K<1K(T+ε)KTT22021214
胡寿松自动控制原理习题解答第四章4-1设单位反馈控制系统的开环传递函数∗KG(s)=s+1∗试用解析法绘出K从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上:(-2+j0),(0+j1),(-3+j2)解:有一个极点:(-1+j0),没有零点。根轨迹如图中红线所示。(-2+j0)点在根轨迹上,而(0+j1),(-3+j2)点不在根轨迹上。4-2设单位反馈控制系统的开环传递函数K(3s+1)G(s)=s(2s+1)试用解析法绘出开环增益K从零增加到无穷时的闭环根轨迹图。 解:3K/2(s+1/3)Kg(s+1/3)系统开环传递函数为G(s)==s(s+1/2)s(s+1/2)有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。根轨迹如图中红线所示。4-3已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。1
胡寿松自动控制原理习题解答第四章图4-28开环零、极点分布图4-4设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d): K(1)G(s)=s(0.2s+1)(0.5s+1)解:10KKg系统开环传递函数为G(s)==s(s+5)(s+2)s(s+5)(s+2)有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。分离点坐标计算如下:1112++=03d+14d+10=0解方程的d=−3.7863,d=−0.8812dd+2d+5取分离点为d=−0.88根轨迹如图中红线所示。2
胡寿松自动控制原理习题解答第四章K(s+1)(2)G(s)=s(2s+1)解:K/2(s+1)Kg(s+1)系统开环传递函数为G(s)==s(s+0.5)s(s+0.5)有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。分离点坐标计算如下:1112+=d+2d+0.5=0解方程的d=−1.7,d=−0.2912dd+0.5d+1取分离点为d=−1.7,d=−0.2912根轨迹如图中红线所示。*K(s+5)(3)G(s)=s(s+2)(s+3)解:*K(s+5)系统开环传递函数为G(s)=s(s+2)(s+3)有三个极点:(0+j0),(-2+j0),(-2+j0),有一个零点(-5+j0)。分离点坐标计算如下:111132++=d+10d+25d+15=0解方程的d=−6.5171,1dd+2d+3d+53
胡寿松自动控制原理习题解答第四章d=−2.5964,d=−0.886523取分离点为d=−0.8865根轨迹如图中红线所示。4-5已知单位反馈控制系统开环传递函数如下,试概略画出相应的闭环根轨迹图(要求算出起始角θ):pi∗K(s+2)(1)G(s)=(s+1+j2)(s+1−j2)解:∗K(s+2)K(s+2)g系统开环传递函数为G(s)=(s+1+j2)(s+1−j2)(s+1+j2)(s+1−j2)有两个极点:p=(-1+j2),p=(-1-j2),有一个零点(-2,j0)。12起始角:mnθpi=(2k+1)π+∑ϕzjpi−∑θpipik=0,±1,±2,Lj=1j=1(j≠i)0000θ=π+ϕ−θ=180+45−90=135p1z1p1p2p10000θ=π+ϕ−θ=180−45+90=225p2z1p2p1p2根轨迹如图中红线所示。4
胡寿松自动控制原理习题解答第四章∗K(s+20)(2)G(s)=。s(s+10+j10)(s+10−j10)解:∗K(s+20)系统开环传递函数为G(s)=s(s+10+j10)(s+10−j10)有三个极点:p=(0,j0),p=(-10+j10),p=(-10-j10),有一个零点z=(-123120,j0)。起始角:mnθpi=(2k+1)π+∑ϕzjpi−∑θpipik=0,±1,±2,Lj=1j=1(j≠i)0θ=180p1000000θ=180+ϕ−θ−θ=180+45−135−90=0p2z1p2p1p2p3p2000000θ=180+ϕ−θ−θ=180−45+135+90=0p3z1p3p1p3p2p3根轨迹如图中红线所示。Imj10Re-10-2004-6设单位反馈控制系统的开环传递函数如下,要求: ∗K(1)确定G(s)=产生纯虚根的开环增益值。s(s+1)(s+10)32*解:系统特征方程为s+11s+10s+K=0令s=jω代入特征方程中得:*2实部方程为:K−11ω=03虚部方程为:10ω−ω=05
胡寿松自动控制原理习题解答第四章2**解上述方程得:ω=10K=110开环增益按一般定义:K=K/10=11∗K(s+z)∗(2)确定G(s)=产生纯虚根为±j1的z值和K值。2s(s+10)(s+20)432**解:系统特征方程为s+30s+200s+Ks+Kz=0令s=j1代入特征方程中得:*实部方程为:Kz+1−200=0*虚部方程为:K−30=0*解上述方程得:K=30z=199/30∗K(3)概略绘出确定G(s)=的闭环根轨迹图。(要s(s+1)(s+3.5)(s+3+j2)(s+3−j2)求确定根轨迹的分离点、起始角和与虚轴的交点)。∗K解:系统开环传递函数为G(s)=s(s+1)(s+3.5)(s+3+j2)(s+3−j2)有五个极点:p=(0,j0),p=(-1,j0),p=(-3.5,j0),p=(-3,j2),1234p=(-3,-j2),没有零点。5分离点坐标计算如下:11111++++=0dd+1d+3.5d+3.+j2d+3.−j24324d+35d+111.5d+146d+45.5=0解方程的d=−3.5,d=−0.44,12d=−2.4+j1.265d=−2.4−j1.26534取分离点为d=−0.44起始角:mnθpi=(2k+1)π+∑ϕzjpi−∑θpipik=0,±1,±2,Lj=1j=1(j≠i)6
胡寿松自动控制原理习题解答第四章0θ=180p10θ=0p2000000θ=180−θ−θ−θ−θ=180−146.45−135−90−75.7=93p3p1p3p2p3p4p3p5p3000000θ=180−θ−θ−θ−θ=180+146.45+135+90+75.7=−93p4p1p4p2p4p3p4p5p3根轨迹如图所示。与虚轴的交点:令s=jω代入特征方程中5432*s+10.5s+43.5s+79.5s+45.5s+K=0得到:7
胡寿松自动控制原理习题解答第四章42*实部方程为:10.5ω−79.5ω+K=053虚部方程为:ω−43.5ω+45.5ω=0*解方程得到:ω=6.5136ω=1.0356,将ω=6.5136代入实部方程得到K<0不121*符合要求,将ω=1.0356代入实部方程得到K=73满足要求。2所以取ω=1.0356即根轨迹与虚轴的交点为ω=±1.03564-7设单位反馈系统的开环传递函数为∗K(s+2)G(s)=s(s+1)其根轨迹图见图4-2。试从数学上证明:复数根轨迹部分是以(-2,j0)为圆心,以2为半径的一个圆。图4-2系统根轨迹图解:证明如下:根据辐角条件可知,根轨迹各点应满足0∠(s+2)−∠s−∠(s+1)=180在复平面上s=σ+jω,于是得0∠(σ+jω+2)−∠(σ+jω)−∠(σ+jω+1)=180ωωω0亦即arctan−arctan=arctan+1802+σσ1+σ利用反正切公式X−YarctanX−arctanY=arctan1+XY可把上式改写为对上式的两边取正切,整理后即得圆方程式8
胡寿松自动控制原理习题解答第四章22(σ+2)+ω=2它的圆心为(-2,j0)半径等于2。这个圆与实轴的交点即为分离点和会合点。证毕。4-8已知开环传递函数为*KG(s)H(s)=2s(s+4)(s+4s+20)试概略画出闭环系统根轨迹图。解:系统开环传递函数为*KG(s)H(s)=2s(s+4)(s+4s+20)有四个极点:p=(0,j0),p=(-4,j0),p=(-2,j4),p=(-2,-j4),1234没有零点。分离点坐标计算如下:1111+++=0dd+4d+2.+j4d+2.−j42即(2d+8d+20)(2d+4)=0解方程的d=−2,d=−2+j2.45,d=−2−j2.45123取分离点为d=−2,d=−2+j2.45,d=−2−j2.45123起始角:mnθpi=(2k+1)π+∑ϕzjpi−∑θpipik=0,±1,±2,Lj=1j=1(j≠i)0θ=180p10θ=−90p2θ=+90p30θ=0p4根轨迹如图所示。9
胡寿松自动控制原理习题解答第四章4-9已知开环传递函数为*K(s+2)G(s)=22(s+4s+9)试概略绘制其闭环系统根轨迹。解:系统有四个极点:p=p=(-2,j2.24),p=p=(-2,-j2.24),有一个零1234点z=(-2,j0)。1分离点坐标计算如下:221+=d+2+j2.24d+2−j2.24d+22即3d+12d+7=0解方程的d=−3.29,d=−0.71,12取分离点为d=−3.291起始角:mnθpi=(2k+1)π+∑ϕzjpi−∑θpipik=0,±1,±2,Lj=1j=1(j≠i)10
胡寿松自动控制原理习题解答第四章02θ=(2k+1)180+ϕ−θk=0,±1,±2,Lp1zjpipipi000000=(2k+1)180+90−90−90=(2k+1)180−900000所以:θ=45,225同理θ=135,−45p1p2系统根轨迹如下图:4-10设单位反馈控制系统的开环传递函数KG(s)=s(0.01s+1)(0.02s+1)要求: (1)画出准确根轨迹(至少校验三点); (2)确定系统的临界稳定开环增益Kc; (3)确定与系统临界阻尼比相应的开环增益K。 解:系统开环传递函数为*K5000KKG(s)===s(0.01s+1)(0.02s+1)s(s+100)(s+50)s(s+100)(s+50)有三个极点:p=(0,j0),p=(-50,j0),p=(-100,j0),没有零点。123分离点坐标计算如下:111++=0dd+50d+1002即解方程3d+300d+5000=0得d=−78.9,d=−21.1,1211
胡寿松自动控制原理习题解答第四章取分离点为d=−21.1,起始角:mnθpi=(2k+1)π+∑ϕzjpi−∑θpipik=0,±1,±2,Lj=1j=1(j≠i)000θ=180θ=0θ=180p1p2p3根轨迹如图所示。32*(2)令s=jω代入系统特征方程中s+150s+5000s+K=0*2得到实部方程为:K−150ω=03虚部方程为:5000ω−ω=0*解方程得:ω=70.7K=750000所以K=150c32*(3)令s=−21.1代入系统特征方程中s+150s+5000s+K=0*得到K=48112系统临界阻尼比相应的开环增益K=9.6212
胡寿松自动控制原理习题解答第四章4-11一单位反馈系统,其开环传递函数26.9(s+6s+25)G(s)=2s(s+8s+25)试用根轨迹法计算闭环系统根的位置。22解:系统特征方程为:s(s+8s+25)+6.9(s+6s+25)=032即:s+14.9s+66.4s+172.5=0-9.9780-2.4610+3.3513i-2.4610-3.3513i解方程得:s=−9.978s=−2.461+j3.3513s=−2.461−j3.3513123所以:闭环系统根的位置为s=−2.461+j3.3513s=−2.461−j3.351323根轨迹如图所示:4-12设反馈控制系统中*KG(s)=,H(s)=12s(s+2)(s+5)要求:(1)概略绘出系统根轨迹图,并判断闭环系统的稳定性;(2)如果改变反馈通路传递函数,使H(s)=1+2s,试判断H(s)改变后的系统稳定性,13
胡寿松自动控制原理习题解答第四章研究由于H(s)改变所产生的效应。解:(1)系统有四个极点p=(0,j0),p=(0,j0),p=(−2,j0),p=(−5,j0);没1234有零点。系统根轨迹如下图:所以闭环系统不稳定。(2)如果H(s)=1+2s,这时系统的开环传递函数为:*K(s+0.5)K(2s+1)g*G(s)H(s)==其中K=2K22gs(s+2)(s+5)s(s+2)(s+5)系统根轨迹如下图:14
胡寿松自动控制原理习题解答第四章这时系统的特征方程为:2432s(s+2)(s+5)+K(s+0.5)=s+7s+10s+Ks+0.5K=0ggg令s=jω代入特征方程中,得到:42实部方程为:ω−10ω+0.5K=0g3虚部方程为:Kω−7ω=0g*解上述方程得到:K=45.5这是系统的临界稳定的放大倍数。即01时的根轨迹和ttt单位阶跃响应曲线。若取K=0.5,试求出K=10时的闭环零、极点,并估算系统的动态t性能。R(s)KC(s)s(s+1)-1+Kts解:(1)K=0时系统的开环传递函数为tKG(s)=s(s+1)系统的根轨迹如下图:21
胡寿松自动控制原理习题解答第四章(2)01设K=0.5则z=2ts(s+1)s(s+1)系统的根轨迹如下图:22
胡寿松自动控制原理习题解答第四章(3)K>1时系统的开环传递函数为t*K(1+Kts)K(s+z)G(s)H(s)=此时G(s)H(s)=,z<1设K=2则z=0.5ts(s+1)s(s+1)系统的根轨迹如下图:23
胡寿松自动控制原理习题解答第四章(4)取K=0.5,试求出K=10时的闭环零、极点,并估算系统的动态性能。t2系统的特征方程为:s+6s+10=0解方程的s=−3+j,s=−3−j12此时闭环系统没有零点、有一对共轭极点分别为s=−3+j,s=−3−j12系统呈现二阶系统特性:阻尼比为0.948,超调量近似为1%。自然振荡角频率为3.16。4-19设控制系统开环传递函数为∗K(s+1)G(s)=2s(s+2)(s+4)试分别画出正反馈系统和负反馈系统的根轨迹图,并指出它们的稳定情况有何不同?解:(1)负反馈情况系统有四个极点,p=p=(0,j0),p=(−2,j0),p=(−4,j0),有一个零点z=(1,j0)12341系统根轨迹如下图所示:24
胡寿松自动控制原理习题解答第四章432∗系统的特征方程为:s+6s+8s+K(s+1)=0令s=jω代入特征方程中,得到:42*实部方程为:ω−8ω+K=0*3虚部方程为:Kω−6ω=0*解上述方程得到:K=12,ω=2*所以当002s(Ts+1)试分析并绘制τ>T和T>τ情况下的概略开环幅相曲线。解:相频特性为0ϕ(ω)=−180+arctanτω−arctanTω0(1)τ>T时,ϕ(ω)>−180概略开环幅相曲线如下0(1)τ012s(Ts+1)10当取ω=1时,∠G(jω)=−180,G(jω)=0.5。当输入为单位速度信号时,系统的稳态误差为0.1,试写出系统开环频率特性表达式。解:K=limsG(s)=K=10Vs→022K(Tω)+110(T)+122当ω=1时G(jω)===0.522(Tω)+1(T)+1114
胡寿松自动控制原理习题解答第五章0∠G(jω)=−90−arctanTω−arctanTω1200T1+T20=−90−arctanT−arctanT=−90−arctan=−180121−TT122110(T2)+1即:1−TT=0T=代入到G(j)==0.5中得到:121T(T)2+1211T=T=20212010(−s/20+1)所以系统的开环传递函数为:G(s)=s(20s+1)10(−jω/20+1)系统开环频率特性表达式为:G(jω)=jω(20jω+1)5-8已知系统开环传递函数10G(s)H(s)=2s(2s+1)(s+0.5s+1)试分别计算ω=0.5和ω=2时,开环频率特性的幅值A(ω)和相位ϕ(ω)。解:10A(ω)=2222ω4ω+1(1−ω)+(0.5ω)00.5ωϕ(ω)=−90−arctan2ω−arctan21−ω(1)ω=0.5时1010A(ω)===17.8622220.520.625ω4ω+1(1−ω)+(0.5ω)00.5ω0000ϕ(ω)=−90−arctan2ω−arctan=−90−45−18.4=153.421−ω(2)ω=2时1010A(ω)===0.383222221710ω4ω+1(1−ω)+(0.5ω)00.5ω00000ϕ(ω)=−90−arctan2ω−arctan=−90−76−180+18.4=327.621−ω5-9已知系统开环传递函数10G(s)H(s)=2s(s+1)(s/4+1)试绘制系统概略开环幅相曲线。5
胡寿松自动控制原理习题解答第五章解:5-10已知系统开环传递函数(s+1)G(s)H(s)=2ssss+1++1293要求选择频率点,列表计算A(ω),L(ω)和ϕ(ω),并据此在对数坐标纸上绘制系统开环对数频率特性曲线。解由题给传递函数知,系统的交接频率依次为1,2,3。低频段渐近线的斜率为-20,且过(1,0dB)点。oωω/3系统相频特性按下试计算ϕ(ω)=−90+arctgω−arctg−arctg221−ω/9令ω为不同值,将计算结果列表如下ω0.10.51357101520ϕ(ω)−89o−87.2o−92.1o−164o−216o−234.5o−246o−254o−258oω3050100ϕ(ω)−262o−265o−267.7o作系统开环对数频率特性图,求得ω=1,系统的穿越频率ω=18cr1系统的幅值裕度和相角裕度为h==0.512G(jω)cooγ=180+ϕ(ω)=−16.1r6
胡寿松自动控制原理习题解答第五章L(ω)(dB)60-2040-4020-200-400.1121020100ω-60ωo0o−90o−1805-11绘制下列函数的对数幅频渐进特性曲线:2(1)G(s)=(2s+1)(8s+1)200(2)G(s)=2s(s+1)(10s+1)s8(+1)0.1(3)G(s)=2ss(s+s+1)(+1)22ss10(++1)40010(4)G(s)=ss(s+1)(+1)0.1解:(1)系统的交接频率为0.125和0.5,低频段渐近线的斜率为-0,且过(0.125,6dB)点,截止频率为ω=0.25。c对数幅频渐进特性曲线如下:7
胡寿松自动控制原理习题解答第五章L(ω)-200.5ω0.250.125-40(2)系统的交接频率为0.1和1,低频段渐近线的斜率为-40,且过(0.1,66dB)和(1,6dB)点,截止频率为ω=2.1。c对数幅频渐进特性曲线如下:-40L(ω)66-606ω0.11-80(3)系统的交接频率为0.112,低频段渐近线的斜率为-20,且过(0.1,38dB)点,截止频率为ω=5.43。c对数幅频渐进特性曲线如下:-20L(ω)38-4026ω0.112-60(4)系统的交接频率为0.1120,低频段渐近线的斜率为-20,且过(0.1,40dB)8
胡寿松自动控制原理习题解答第五章点,截止频率为ω=1。c对数幅频渐进特性曲线如下:-20L(ω)40-4020ω10.1-60-20-265-12已知最小相位系统的对数幅频渐进特性曲线如图5-50所示,试确定系统的开环传递函数。解:100(s/ω+1)2(a)G(s)=(s/ω+1)(s/ω+1)13由图(a)得到ω=100ω=1000ω321100(0.001s/ω+1)1所以:G(s)=(s/ω+1)(s/100+1)110(s/ω+1)1(b)G(s)=2s(s/ω+1)222Ksωn(c)G(s)=22(s+2ξωs+ω)(s/10+1)nn5-13试用奈氏判据分宾判断题5-5,5-6系统的闭环稳定性。解:5-5(1)τ>T时系统闭环稳定。(2)T>τ时系统闭环不稳定。5-6(1)ν=1时系统闭环稳定。(2)ν=2,3,4时系统闭环不稳定。9
胡寿松自动控制原理习题解答第五章5-14已知下列系统开环传递函数(参数K,T,T>0;i=1,2,L,6):iK(1)G(s)=(Ts+1)(Ts+1)(Ts+1)123K(2)G(s)=s(Ts+1)(Ts+1)12K(3)G(s)=2s(Ts+1)K(Ts+1)1(4)G(s)=2s(Ts+1)2K(5)G(s)=3sK(Ts+1)(Ts+1)12(6)G(s)=3sK(Ts+1)(Ts+1)56(7)G(s)=s(Ts+1)(Ts+1)(Ts+1)(Ts+1)1234K(8)G(s)=Ts−1−K(9)G(s)=−Ts+1K(10)G(s)=s(Ts+1)其系统开环幅相曲线分别如图5-51(1)~(10)所示,试根据奈氏判据判定各系统的闭环稳定性,若系统闭环不稳定,确定其s右半平面的闭环极点数。解:(1)系统闭环稳定(2)系统闭环稳定(3)系统闭环不稳定(4)系统闭环稳定(5)系统闭环不稳定(6)系统闭环稳定(7)系统闭环稳定(8)系统闭环稳定(9)系统闭环稳定(10)系统闭环不稳定????5-15根据奈氏判据确定题5-9系统的闭环稳定性。闭环不稳定。5-16已知系统开环传递函数10
胡寿松自动控制原理习题解答第五章KG(s)=;K,T>0s(Ts+1)(s+1)试根据奈氏判据,确定其闭环稳定条件:(1)T=2时,K值的范围。(2)K=10时,T值的范围。(3)K,T值的范围。解:(1)T=2时002ω+ω0ϕ(ω)=−90−arctan2ω−arctanω=−90−arctan=−18021−2ω1解以上方程得ω=2K代入A(ω)==1得到K=1.522ω4ω+11+ω所以:K<1.5时系统闭环稳定(2)K=10时00Tω+ω0ϕ(ω)=−90−arctanTω−arctanω=−90−arctan=−18021−Tω1解以上方程得ω=TKT1010T代入A(ω)==1中A(ω)===1得到22112T+1ωTω+11+ωT+11+TTT=0.1518所以T<0.1518时系统闭环稳定00Tω+ω0(3)ϕ(ω)=−90−arctanTω−arctanω=−90−arctan=−18021−Tω1解以上方程得ω=TK代入A(ω)==1得到22ωTω+11+ωTKKTA(ω)===1112T+1T+11+TT解以上方程得到:11
胡寿松自动控制原理习题解答第五章2T+1K<时系统闭环稳定T5-17试用对数稳定判据判定题5-10系统的闭环稳定性。系统闭环不稳定。5-19若单位反馈系统的开环传递函数−0.8sKeG(s)=s+1试确定使系统稳定的K值范围。解:(1)K>0时ϕ(ω)=−0.8ω−arctanω=−ππ以上方程变形得到:arctanω=π−0.8ω<(1)2得到1.9365<ωK解方程(1)得到ω=2.4483代入A(ω)=中得到2ω+1KA(ω)==1解得K=2.64522.4483+1所以:015取K=20ss1520这时系统开环传递函数G(s)=s(s+1)其对数频率渐进曲线如下:L(ω)-2026-40ω14.470截止频率为ω=4.47,相角裕量γ(ω)=12.6不满足要求。cc其希望的对数频率渐进曲线如下(按二阶最佳校正):L(ω)-2026-402040ω14.47
胡寿松自动控制原理第六章习题解答20校正后的开环传递函数为G(s)G(s)=cs(s/40+1)G(s)Gc(s)s+1所以G(s)==cG(s)s/40+1c′0这是系统的截止频率为ω=20,相角裕量γ(ω)=65.5满足要求。cc6-4已知一单位反馈控制系统,其固定不变部分传递函数G(s)和串联校正装置0G(s)分别如图6—42(a),(b)和(c)所示。要求:c(1)写出校正后各系统的开环传递函数;(2)分析各G(s)对系统的作用,并比较其优缺点。c解:(1)20s/0.5+1(a)G(s)=G(s)=cs(s/10+1)s/0.1+120(s/0.5+1)所以校正后系统的传递函数为:G(s)G(s)=cs(s/10+1)(s/0.1+1)3
胡寿松自动控制原理第六章习题解答20s/10+1(b)G(s)=G(s)=cs(s/20+1)s/100+120(s/10+1)所以校正后系统的传递函数为:G(s)G(s)=cs(s/20+1)(s/100+1)KK(Ts+1)(Ts+1)0c23(c)G(s)=G(s)=c(s/ω+1)(s/ω+1)(s/ω+1)(Ts+1)(Ts+1)12314所以校正后系统的传递函数为:KK(Ts+1)(Ts+1)0c23G(s)G(s)=c(s/ω+1)(s/ω+1)(s/ω+1)(Ts+1)(Ts+1)12314(2)6-6设单位反馈系统的开环传递函数为8G(s)=s(2s+1)若采用滞后—超前校正装置(10s+1)(2s+1)G(s)=c(100s+1)(0.2s+1)对系统进行串联校正,试绘制系统校正前后的对数幅频渐近特性,并计算系统校正前后的相角裕度。解:8系统校正前的开环传递函数为G(s)=,其对数幅频渐近特性如下:s(2s+1)L(ω)-2024-40ω0.52截止频率为:ω=2c0000ϕ(ω)=−90−arctan2ω=−90−76=−166cc00γ(ω)=ϕ(ω)+180=14cc4
胡寿松自动控制原理第六章习题解答系统校正后的开环传递函数为8(10s+1)(2s+1)8(10s+1)8(s/0.1+1)G(s)G(s)===cs(2s+1)(100s+1)(0.2s+1)s(100s+1)(0.2s+1)s(s/0.01+1)(s/5+1)系统的交接频率为0.010.15,其对数幅频渐近特性如下:L(ω)-2058-4018-205ω0.010.1-40截止频率为:ω=0.8c0ϕ(ω)=−90+arctan10ω−arctan100ω−arctan0.2ωcccc00000=−90+82.9−89.3−9=−105.400γ(ω)=ϕ(ω)+180=74.6cc6-7设单位反馈系统的开环传递函数KG(s)=s(s+1)(0.25s+1)−10(1)若要求校正后系统的静态速度误差系数K≥5s,相角裕度γ≥45,试设计串联v校正装置;(2)若除上述指标要求外,还要求系统校正后截止频率ω≥2rad/s,试设计串联校正c装置。−1−1−1解:(1)因为K≥5s,所以K≥5s。取K=5sv系统校正前的对数幅频渐近特性如下:5
胡寿松自动控制原理第六章习题解答L(ω)-2014-404ω1-10-60截止频率为:ω=2.24c00000ϕ(ω)=−90−arctanω−arctan0.25ω=−90−65.9−29=−184.9ccc00γ(ω)=ϕ(ω)+180=−4.9cc系统不稳定,需要加串联校正装置。设采用滞后校正,校正后系统希望的对数幅频渐进曲线如下:L(ω)-20-4014-40-204ωω11ω2-10-60-40-60校正后的系统传递函数为:5(s/ω+1)2G(s)G(s)=cs(s/ω+1)(s+1)(0.25s+1)1"设校正后系统中频段宽度为16,校正后的截止频率ω=1/4=0.25ω=1/16c2""5*ωc*16则A(ω)==1,经计算得ω=1/320c""1ωω/ωcc16
胡寿松自动控制原理第六章习题解答所以校正后的系统传递函数为:5(16s+1)G(s)G(s)=cs(320s+1)(s+1)(0.25s+1)0′′′′ϕ(ω)=−90+arctan16ω−arctan320ω−arctanω−arctan0.25ω这时ccccc000000=−90+76−89.2−14−3.6=−120.800γ(ω)=ϕ(ω)+180=59.2cc(2)设校正后系统希望的频率特性如下:L(ω)-20-4014-40-204ω2ω3ωω11-10-40-60校正后的系统传递函数为:5(s/ω+1)2G(s)G(s)=cs(s/ω+1)(0.25s+1)(s/ω+1)13设校正后的截止频率ω=2ω=0.2c25*ω*5c则A(ω)==1,经计算得ω=2/25c1ωω/ωcc1所以校正后的系统传递函数为:5(5s+1)G(s)G(s)=cs(25s/2+1)(0.25s+1)(s/ω+1)30ϕ(ω)=−90+arctan5ω−arctan(25ω/2)−arctan0.25ω−arctan(ω/ω)ccccc3这时00000=−90+84.3−87.7−26.6−arctan(ω/ω)=−135c3经计算得ω=7.46300γ(ω)=ϕ(ω)+180=45cc所以校正后的系统传递函数为:7
胡寿松自动控制原理第六章习题解答5(5s+1)G(s)G(s)=cs(25s/2+1)(0.25s+1)(s/7.46+1)校正装置的传递函数为G(s)G(s)(5s+1)(s+1)cG(s)==为滞后-超前校正装置。cG(s)(25s/2+1)(s/7.46+1)6-8图6—43为三种推荐稳定系统的串联校正网络特性,它们均由最小相位环节组成。若控制系统为单位反馈系统,其开环传递函数为400G(s)=2s(0.01s+1)试问:(1)这些校正网络特性中,哪一种可使已校正系统的稳定程度最好?(2)为了将12Hz的正弦噪声削弱10倍左右,你确定采用哪种校正网络特性?解:三种校正网络传递函数分别为:s+1(a)G(s)=cs/0.1+1s/10+1(b)G(s)=cs/100+12(s/2+1)(c)G(s)=c(s/0.1+1)(s/40+1)校正后的传递函数为:400(s+1)(a)G(s)G(s)=c2s(s/0.1+1)(0.01s+1)400(s/10+1)(b)G(s)G(s)=c22s(0.01s+1)8
胡寿松自动控制原理第六章习题解答2400(s/2+1)(c)G(s)G(s)=c2s(s/0.1+1)(s/40+1)(0.01s+1)6-9设单位反馈系统的开环传递函数KG(s)=s(0.1s+1)(0.01s+1)试设计串联校正装置,使系统期望特性满足下列指标:−1(1)静态速度误差系数K≥250s;v(2)截止频率ω≥30rad/s;c0(3)相角裕度γ(ω)≥45;c解:由题目给定的条件(1),取K=250系统校正前的对数幅频渐近特性如下:L(ω)-2028-40100ω10-12-60截止频率为:ω=50c00000ϕ(ω)=−90−arctanω/10−arctanω/100=−90−78.7−26.6=−195.3ccc00γ(ω)=ϕ(ω)+180=−15.3cc系统不稳定,需要加串联校正装置。设校正后系统的截止频率为:ω=50,校正后系统希望的对数幅频渐进曲线如下:c9
胡寿松自动控制原理第六章习题解答L(ω)-2028-40100ω3ωω1ω210-12-60-60校正后的系统传递函数为:250(s/ω+1)2G(s)G(s)=cs(s/ω+1)(s/100+1)(s/ω+1)13选取ω=52250*ω*5c则A(ω)==1,经计算得ω=1/25c1ωω/ωcc1所以校正后的系统传递函数为:250(s/5+1)G(s)G(s)=cs(25s+1)(s/100+1)(s/ω+1)30ϕ(ω)=−90+arctanω/5−arctan25ω−arctan0.01ω−arctanω/ωccccc3这时00000=−90+84.3−89.9−26.6−arctanω/ω=−135c3经计算得到ω=2173校正装置传递函数为:G(s)G(s)(s/5+1)(s/10+1)cG(s)==cG(s)(25s+1)(s/217+1)6—10设可控硅—电动机调速系统中的电流环如图6-44所示。图中,调节对象传递函数82.5200G(s)=,G(s)=12s(0.0033s+1)(0.2s+1)10
胡寿松自动控制原理第六章习题解答给定滤波器传递函数1G(s)=sTs+12比例—积分控制器传递函数K(τs+1)cG(s)=cτs反馈环节传递函数0.0024G(s)=L(0.0018s+1)试按三阶最佳工程设计法确定参数K,τ和T。c2Kc(τs+1)82.5200解:系统传递函数G(s)G(s)G(s)=c12τss(0.0033s+1)0.2s+16-11设系统结构图如图6-34所示。图中G(s)=K=2001110G(s)=2(0.01s+1)(0.1s+1)0.1G(s)=3s若要求校正后系统在单位斜坡输入作用下的稳态误差e=1/200rad,相角裕度ss0γ(ω)≥45,试确定反馈校正装置G(s)的形式与参数。cc11
胡寿松自动控制原理第六章习题解答解:待校正系统的开环传递函数为200×0.110G(s)=G(s)G(s)G(s)=132s(0.01s+1)(0.1s+1)200=s(0.01s+1)(0.1s+1)对数幅频特性如图:-20L(ω)26-40100ω10-14-60希望的对数幅频特性如图:-20L(ω)26-40100ωω110ωcω2-14-60希望的(校正后)传递函数为:200(s/ω+1)2G(s)=02s(s/ω+1)(s/100+1)1由此得到ω=20选ω=2c2200×20/5G(jω)==1ω=0.50c120×20/ω1200(s/2+1)所以G(s)=02s(s/0.5+1)(s/100+1)0ωωωϕ(ω)=−90+arctan−arctan−2arctan20.510012
胡寿松自动控制原理第六章习题解答00000ϕ(ω)=−90+84.3−88.6−22.6=−112.6c0000γ(ω)=180+ϕ(ω)=180−112.6=67.4cc满足系统要求所以校正装置传递函数为G0(s)(s/2+1)(s/10+1)G(s)==为滞后-超前校正装置。cG(s)(s/0.5+1)(s/100+1)13
胡寿松自动控制原理习题解答第七章7—1试根据定义∞*−nsTE(s)=∑e(nT)en=0*确定下列函数的E(s)和闭合形式的E(z):(1)e(t)=sinωt1(2)E(s)=(s+a)(s+b)(s+c)解:(1)e(t)=sinωt∞*−nsTE(s)=∑sin(ωnT)en=0zsinωTE(z)=2z−2zcosωT+11(2)E(s)=(s+a)(s+b)(s+c)−at−bt−cteeee(t)=++(b−a)(c−a)(a−b)(c−b)(a−c)(b−c)∞−anT−bnT−cnT*eee−nsTE(s)=∑++en=0(b−a)(c−a)(a−b)(c−b)(a−c)(b−c)zzzE(z)=++−aT−bT−cT(b−a)(c−a)(z−e)(a−b)(c−b)(z−e)(a−c)(b−c)(z−e)7—2试求下列函数的z变换:n(1)e(t)=a2−3t(2)e(t)=te13(3)e(t)=t3!s+1(4)E(s)=2s−s1−e(5)E(s)=2s(s+1)n解:(1)e(t)=a1
胡寿松自动控制原理习题解答第七章nazE(z)=z−12−3t(2)e(t)=te2−3T2−6TTze2TzeE(z)=+−3T2−3T3(z−e)(z−e)13(3)e(t)=t3!32T(z+4z+1)E(z)=46(z−1)s+111(4)E(s)==+22ssszTzE(z)=+2z−1(z−1)−s−s1−e1e(5)E(s)==−222s(s+1)s(s+1)s(s+1)111111−s=−+−−+e22sss+1sss+1−mE(z)=F(z)−F(z)zTzzzF(z)=−+m=1/T2−T(z−1)z−1z−e7-3试用部分分式法、幂级数法和反演积分法,求下列函数的z反变换:10z(1)E(z)=(z−1)(z−2)−1−3+z(2)E(z)=−1−21−2z+z10z10z10z解:(1)E(z)==−(z−1)(z−2)(z−2)(z−1)ne(nT)=10×(2−1)∞*ne(t)=∑10(2−1)δ(t−nT)n=02
胡寿松自动控制原理习题解答第七章−12−3+zz−3z(2)E(z)==−1−221−2z+zz−2z+1−1−2−3−4−5=−3−5z−7z−9z−11z−13z−L∞*e(t)=−∑(2n+3)δ(t−nT)n=0*7-4试求下列函数的脉冲序列e(t):z(1)E(z)=2(z+1)(3z+1)z(2)E(z)=2(z−1)(z+0.5)z解:(1)E(z)=2(z+1)(3z+1)7-5试确定下列函数的终值:−1Tz(1)E(z)=−12(1−z)2z(2)E(z)=(z−0.8)(z−0.1)Tz解:(1)lime(nT)=lim(z−1)E(z)=lim(z−1)=∞2n→∞z→1z→1(z−1)2z(2)lime(nT)=lim(z−1)E(z)=lim(z−1)=0n→∞z→1z→1(z−0.8)(z−0.1)7-6已知E(z)=Z[e(t)],试证明下列关系式成立:nz(1)Z[ae(t)]=EadE(z)(2)Z[te(t)]=−Tz,T为采样周期。dz7-7已知差分方程为c(k)−4c(k+1)+c(k+2)=0初始条件:c(0)=0,c(1)=1。试用迭代法求输出序列c(k),k=1,2,3,4。3
胡寿松自动控制原理习题解答第七章解:因为c(k)−4c(k+1)+c(k+2)=0k=0时c(0)−4c(1)+c(2)=0所以c(2)=4c(1)−c(0)=4−0=4k=1时c(1)−4c(2)+c(3)=0所以c(3)=4c(2)−c(1)=16−1=15k=2时c(2)−4c(3)+c(4)=0所以c(4)=4c(3)−c(2)=60−4=567-8试用z变换法求解下列差分方程:****c(t+2T)−6c(t+T)+8c(t)=r(t),(1)*r(t)=1(t),c(t)=0(t≤0)****c(t+2T)+2c(t+T)+c(t)=r(t),(2)c(0)=c(T)=0,r(nT)=n,(n=0,1,2,L)c(k+3)+6c(k+2)+11c(k+1)+6c(k)=0(3)c(0)=c(1)=1,c(2)=02c(k+2)+5c(k+1)+6c(k)=cosk(4)πc(0)=c(1)=0****c(t+2T)−6c(t+T)+8c(t)=r(t),解:(1)将变为如下形式*r(t)=1(t),c(t)=0(t≤0)c(k+2)−6c(k+1)+8c(k)=r(k)令k=−1则c(1)−6c(0)+8c(−1)=r(−1)即c(1)=6c(0)=0对差分方程的每一项进行变换,根据实数位移定理:[]222Zc(k+2)=zC(z)−zc(0)−zc(1)=zC(z)Z[]c(k+1)=zC(z)−zc(0)=zC(z)所以:Z[]c(k+2)−6c(k+1)+8c(k)=Z[r(k)]2z即:zC(z)−6zC(z)+8C(z)=z−1z1z1z1z1zC(z)===−+2z−1z−6z+8(z−1)(z−2)(z−4)3z−12z−26z−44
胡寿松自动控制原理习题解答第七章∞*11n1nc(t)=∑−2+4δ(t−nT)n=03267-9设开环离散系统如图7—55所示,试求开环脉冲传递函数G(z)。R(s)C(s)25s+2s+5(a)R(s)C(s)25s+2s+5(b)图7-55开环离散系统22z55z解:Z=Z=s+2z−e−2Ts+5z−e−5T2z5z(a)G(z)=−2T−5Tz−ez−e2510110110z10z(b)Z=Z−=−s+2s+53s+23s+53z−e−2T3z−e−5T−2T−5T10z(e−e)G(z)=−2T−5T3(z−e)(z−e)7—10试求图7—56闭环离散系统的脉冲传递函数Φ(z)或输出z变换G(z)。5
胡寿松自动控制原理习题解答第七章R(s)G1(s)T--TG2(s)G3(s)T(a)G2(s)R(s)G1(s)Gh(s)G3(s)G4(s)T-(b)N(s)D2(z)TTR(s)D1(z)Gh(s)G1(s)G2(s)T-T(c)图7-56闭环离散系统G(z)1解:(a)G(z)=121+GG(z)12G(z)1G(z)1+GG(z)G(z)12121G(z)===1+G12(z)G3(z)1+G1(z)G(z)1+G1G2(z)+G1(z)G3(z)31+GG(z)127—11已知脉冲传递函数−1C(z)0.53+0.1zG(z)==−1R(z)1−0.37z其中R(z)=z/(z−1),试求c(nT)。−1−10.53+0.1z0.53+0.1zz0.53z+0.1C(z)=R(z)==−1−121−0.37z1−0.37zz−1z−1.37z+0.37解:z0.47z=−z−1z−0.37∞∑()nc(nT)=1−0.47×0.37δ(t−nT)n=07—15试判断下列系统的稳定性:(1)已知闭环离散系统的特征方程为6
胡寿松自动控制原理习题解答第七章D(z)=(z+1)(z+0.5)(z+2)=0(2)已知闭环离散系统的特征方程为432D(z)=z+0.2z+z+0.36z+0.8=0(注,要求用朱利判据)(3)已知误差采样的单位反馈离散系统,采样周期T=1s,开环传递函数22.57G(s)=2s(s+1)解:(1)D(z)=(z+1)(z+0.5)(z+2)=0由特征方程得到:z=−1z=−0.5z=−2123所以系统不稳定。432(2)D(z)=z+0.2z+z+0.36z+0.8=0列朱利阵列如下:0.80.3610.2110.210.360.8(3)7—16设离散系统如图7-58所示,采样周期T=1s,G(s)为零阶保持器,h*r(t)e(t)e(t)c(t)Gh(s)G(s)T-图7-58离散系统KG(s)=s(0.2s+1)要求:(1)当K=5时,分别在z域和ω域中分析系统的稳定性;(2)确定使系统稳定的K值范围。解:系统开环脉冲传递函数−1K−15K(1)G(z)=(1−z)Z=(1−z)Z22s(0.2s+1)s(s+5)7
胡寿松自动控制原理习题解答第七章−5T−5T−5T−5T−15Tz5(1−e)z5T(1−e)z(4+e)+1−6e=(1−z)2−−5T=−−5T=−5T(z−1)5(z−1)(z−e)(z−1)(z−e)(z−1)(z−e)4.0067z+0.96=2z−1.0067z+0.0067系统特征方程:22z−1.0067z+0.0067+4.0067z+0.96=z+3z+0.9667=0解方程得到z=−2.6328z=−0.3672所以系统不稳定。12−1K−15K(2)G(z)=(1−z)Z2=(1−z)Z2s(0.2s+1)s(s+5)−5T−5T−1KTzK(1−e)zKTK(1−e)=(1−z)2−−5T=−−5T(z−1)5(z−1)(z−e)(z−1)5(z−e)5Kz−0.0335K−0.9933Kz+0.9933K3.0067Kz+0.9598K==225z−5.0335z+0.00355z−5.0335z+0.0035系统特征方程:25z−5.0335z+0.0035+3.0067Kz+0.9598K=025z+(3.0067K−5.0335)z+0.0035+0.9598K=08'
您可能关注的文档
- 自动控制原理 第3章习题解答.pdf
- 自动控制原理 课后答案(孙亮 杨鹏 着) 北京工业大学出版社.pdf
- 自动控制原理(王万良)答案.pdf
- 原理_于希宁_课后习题答案.doc
- 胡寿松第5版_课后习题及答案_完整_.doc
- 自动控制原理及其应用部分习题解答.doc
- 自动控制原理第2版王划一课后习题答案.pdf
- 自动控制原理第3版答案 孙炳达主编.doc
- 自动控制原理第二版 冯巧玲 北航第一章习题及答案.doc
- 自动控制理论第四版课后习题详细解答答案(夏德钤翁贻方版).doc
- 自动控制理论课后习题答案(上).doc
- 自动控制理论课后习题详细解答答案(夏德钤翁贻方版).doc
- 自控习题答案(夏德岑 第三版).doc
- 自控原理习题答案(全).doc
- 自控原理习题答案(陈铁牛 版).doc
- 自控所有答案 教材:《现代控制系统》(第八版)谢红卫等译 高等教育出版社,2001.6.doc
- 自控答案1.doc
- 自控课后答案(二到六章仅供参考).doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明