

- 2.66 MB
- 2022-04-22 11:52:04 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
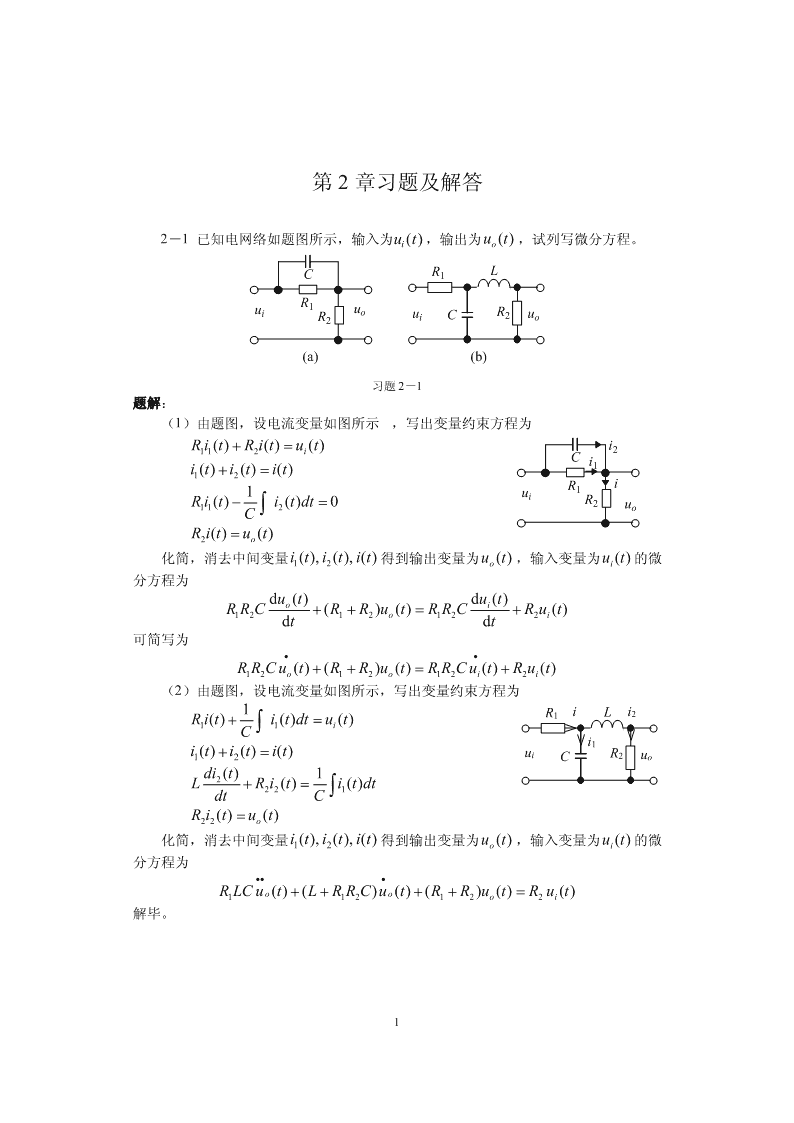
'第2章习题及解答2-1已知电网络如题图所示,输入为ut(),输出为u(t),试列写微分方程。ioCR1LR1uiRuouiCR2uo2(a)(b)习题2-1题解:(1)由题图,设电流变量如图所示,写出变量约束方程为R1i1(t)+R2(ti)=ui(t)i2Ci1it)(+it)(=ti)(121R1iuiR1i1(t)−∫i2(t)dt=0R2uoCR(ti)=u(t)2o化简,消去中间变量i(t),i(t),ti)(得到输出变量为u(t),输入变量为ut)(的微12oi分方程为du(t)du(t)oiRRC+(R+R)u(t)=RRC+Ru(t)1212o122idtdt可简写为••RRCu(t)+(R+R)u(t)=RRCu(t)+Ru(t)12o12o12i2i(2)由题图,设电流变量如图所示,写出变量约束方程为1R1iLi2R(ti)+i(t)dt=u(t)1∫1iCi1i1t)(+i2t)(=ti)(uiCR2uodi(t)12L+Ri(t)=i(t)dt22∫1dtCRi(t)=u(t)22o化简,消去中间变量i(t),i(t),ti)(得到输出变量为u(t),输入变量为ut)(的微12oi分方程为•••RLCu(t)+(L+RRC)u(t)+(R+R)u(t)=Ru(t)1o12o12o2i解毕。1
2-2电磁铁的磁拉力计算公式为2μSNi()0Fxi(,)=,(单位:N)24x式中,μ0为空气导磁率,S为磁极面积,N为激磁绕组匝数,i为激磁电流,x为气隙大小,求出F(,)xi的线性化方程。题解:由于磁拉力F(,)xi为电流i和位移x的双元函数,在工作点邻域F(x,i),其泰000勒级数展开式为••F(xi),=F0(x0,i0)+Fx(xi),x=x0⋅(x−x0)+Fi(xi),x=x0⋅(i−i0)+i=i0i=i01••1••22+Fx(xi),x=x0⋅(x−x0)+Fi(xi),x=x0⋅(i−i0)+Λ!2i=i0!2i=i0忽略二次以上各项有••F(xi),=F0(x0,i0)+Fx(xi),x=x0⋅(x−x0)+Fi(xi),x=x0⋅(i−i0)i=i0i=i0令ΔF=F(xi),−F(x,i)0002•μ0S(Ni0)=−Kx=Fx(xi),x=x02x3i=i002•μ0SNi0=Ki=Fi(xi),x=x02x20i=i0Δx=x−x0Δi=i−i0则有磁拉力增量式ΔF=KΔ⋅x+KΔ⋅ixi将增量式写为一般函数表达式有22μS(Ni)μSNi0000F=K⋅x+K⋅i=−x+ixi2x32x200解毕。2-3求下列时间函数f()t的拉氏变换Fs()。(a)f()tt=051.(cos)−5−2.0t(b)f(t)=ecos314tπ(c)f(t)=sin(5t+)32−3t(d)f(t)=t⋅e题解:2
(a)f()tt=051.(cos)−5由定义或者查表1s125.F(s)=(5.0−)=22ss+25s(s+25)−2.0t(b)f(t)=ecos314t由于sL[cos314t]=22s+314应用拉氏变换的衰减定理有s+2.0s+2.0F(s)==22222(s+)2.0+314s+4.0s+(314+2.0)π(c)ft()sin(=+5t)3由于πππ13sin(5t+)=cossin5t+sincos5t=sin5t+cos5t33322所以153s.0866s+5.2F(s)=⋅+⋅=222222s+52s+5s+252−3t(d)f(t)=t⋅e由于2!2L[t]=3s应用拉氏变换的衰减定理有2F(s)=3(s+)3解毕。MATLAB语言求解(a)f()tt=051.(cos)−5symstf=0.5*(1-cos(5*t));F=laplace(f)F=1/2/s-1/2*s/(s^2+25)−2.0t(b)f(t)=ecos314tsymstf=exp(-0.2*t)*cos(314*t);F=laplace(f)F=(s+1/5)/((s+1/5)^2+98596)3
π(c)ft()sin(=+5t)3symstf=sin(5*t+pi/3);F=laplace(f)F=(1/2*s*3^(1/2)+5/2)/(s^2+25)23−t(d)ftte()=⋅symstf=t^2*exp(-3*t);F=laplace(f)F=2/(s+3)^3解毕。4
2-4求出题图所示时间信号f()t的拉氏变换Fs()。f(t)f(t)f(t)占空比=ηT半波正弦tM0Attt000t0π/ω-MT0<η<1(a)(b)(c)习题2-4题解:f(t)f1(t)(a)由于信号f(t)可以分解为信号的组合如图所示,t1f1t)(=t⋅t)(1→F(s)=0t0f2(t)12sf3(t)1−tsf(t)=−(t−t)⋅(1t−t)→F(s)=−⋅e020022s1−tsf(t)=−t⋅(1t−t)→F(s)=−t⋅⋅e030030s所以拉氏变换为1111−e−t0s1(+ts)F(s)=F(s)+F(s)+F(s)=−⋅e−t0s−t⋅⋅e−t0s=01232202ssss(b)由于信号f(t)可以分解为信号的组合如图所示,f(t)f1(t)f2(t)AωAf1t)(=Asinωt→F1(s)=22ts+ω0πππAω−sft=ωt⋅t−→F(s)=⋅eω2()sin(1)222ωωs+ω所以拉氏变换为πAω−sF(s)=F(s)+F(s)=⋅1(+eω)1222s+ω(c)由于信号f(t)为周期信号,第一周期的信号如图所示,其拉氏变换为f(t)占空比=ηTM2M−ηTsM−TsM−ηTs−TsF(s)=−e+e=1(−2e+e)M1Tssss0已知F1(s),则周期信号的拉氏变换为-M1F(s)=⋅F(s)−Ts11−e所以占空比为η的方波脉冲信号的拉氏变换为−ηTs−Ts1M1−2e+eF(s)=⋅F(s)=⋅−Ts1−Ts1−es1−e解毕。2-5已知下列拉氏变换Fs(),求出时间表达式f()t,并画出曲线草图。5
22ss++100ss++35(a)Fs()=(b)Fs()=22ss()+100ss+24+−Ts1−e1(c)Fs()=2(d)Fs()=−Tss1−e题解:(a)将F(s)作海维塞分解可分解为1.111F(s)=+2ss+100作拉氏反变换,有1=1111f(t)=L[+]=(1t)+sin10t2ss+10010时间曲线如图所示。0.90123(b)将F(s)作海维塞分解可分解为1s+1s+1F(s)=1+=1+s2+2s+4(s+)12+()320.5作拉氏反变换,有−1s+1−t0f(t)=L1[+]=δ(t)+ecos3t22(s+)1+()3-0.5时间曲线如图所示。0246(c)F(s)可分解为11−TsTF(s)=−e22tss0作拉氏反变换,有T−111−Tsf(t)=L[−e]=t⋅(1t)−(t−T)⋅(1t−T)22ss时间曲线如图所示。(d)F(s)可作等比级数分解为1−Ts−2TsF(s)==1+e+e+Λ−Ts1−e作拉氏反变换,有−1−Ts−2Tsf(t)=L1[+e+e+Λ]=δ(t)+δ(t−T)+δ(t−2T)+Λ时间曲线如图所示。解毕。6
2-6用拉氏变换法求解下式微分方程。••••(a)2c+7c+5c=r,r=R⋅1()t,c)0(=,0c)0(=0•••••(b)2c+7c+5c=0,c)0(=c,c)0(=c00题解:••••(a)2c+7c+5c=r,r=R⋅1()t,c)0(=,0c)0(=0将方程两边作拉氏变换•••L2[c+7c+5c]=L[r]由拉氏变换的线性定理有•••L2[c]+L7[c]+L5[c]=L[r]由拉氏变换的微分定理有•2[2sC(s)−sc)0(−c0()]+[7sC(s)−c0()]+5C(s)=R(s)•1将初值c)0(=,0c)0(=0及输入信号的拉氏变换R(s)=L[R⋅(1t)]=R⋅代入上式s212sC(s)+7sC(s)+5C(s)=R⋅s有输出信号的拉氏变换为11111121C(s)=⋅⋅R=R⋅[⋅−⋅+⋅]22s+7s+5s5s3s+115s+5.2作拉氏反变换解得11−t2−5.2tc(t)=R⋅[⋅(1t)−⋅e+⋅e]5315•••••(b)2c+7c+5c=0,c)0(=c,c)0(=c00本题为齐次方程求解,初始条件不为零而输入信号为零。将方程两边作拉氏变换•••L2[c+7c+5c]=0由拉氏变换的微分定理有•2[2sC(s)−sc)0(−c0()]+[7sC(s)−c0()]+5C(s)=0••将初值c)0(=c0,c)0(=c0代入上式•22sC(s)−2sc−2c+7sC(s)−7c+5C(s)=0000整理有•22[s+7s+]5C(s)=2cs+2(c+7c)000方程解的拉氏变换为•2cs+2(c+7c)000C(s)=22s+7s+57
作拉氏反变换解得••2c0+5c0−t2c0+2c0−5.2tct)(=⋅e−⋅e33解毕。MATLAB符号运算求解••••(a)2c+7c+5c=r,r=R⋅1()t,c)0(=,0c)0(=0f="2*D2c+7*Dc+5*c=R,c(0)=0,Dc(0)=0";dsolve(f)ans=1/5*R-1/3*R*exp(-t)+2/15*R*exp(-5/2*t)•••••(b)2c+7c+5c=0,c)0(=c,c)0(=c00f="2*D2c+7*Dc+5*c=0,c(0)=c1,Dc(0)=c2";dsolve(f,"t")ans=(5/3*c1+2/3*c2)*exp(-t)+(-2/3*c1-2/3*c2)*exp(-5/2*t)解毕。2-7用运算放大器组成的有源电网络如题图所示,试采用复数阻抗法写出它们的传递函数。R2R3CR2CuiR1R3uouiR1-uo-+R4+R5(a)(b)习题2-7题解:(a)应用复数阻抗法,如图所示计算反馈复数阻抗U(s)R1o2⋅⋅=I(s)R+R2R2Cs+1R23RCs+12则反馈复数阻抗为U(s)oZ(s)==RRCs+R+Rf2323I(s)Uo(s)Zf(s)对于反相运算电路,其传输关系为,G(s)==−,输入阻抗为Z(s)=R,i1U(s)Z(s)ii将输入阻抗与反馈阻抗代入上式,得到传递函数为1R+RRR2323G(s)=−(RRCs+R+R)=−(Cs+)12323RRR+R11238
(b)应用复数阻抗法,计算反馈复数阻抗,由于R3R(R+)52U(s)RCs+11o3⋅⋅=I(s)fRRR333R(R+)R+(R+)R+52522RCs+1RCs+1RCs+1333R+4R3R+(R+)52RCs+13则反馈复数阻抗为RR23Cs+1U(s)(R+R)(R+R)R+Ro234523Z(s)==⋅+Rf4I(s)RRCs+1f53输入阻抗为Z(s)=R,将输入阻抗与反馈阻抗代入上式,得到传递函数为i1RR23Cs+1Uo(s)Zf(s)(R2+R3)(R4+R5)R2+R3R4G(s)==−=−[⋅+]U(s)Z(s)RRRCs+1Rii1531解毕。2-8力学系统如图所示,试写出系统的微分方程,并求取传递函数。yik1k1k2m1mk2F(t)x(t)m2fyo(a)(b)习题2-8题解:(a)忽略重力,应用牛顿第二定律ma=∑F,写出运动平衡方程为ma=F+F+F(t)k1k22dx其中F=−kx,F=−kx,而a=,均代入平衡方程得k22k112dt2dxm=−kx−kx+F(t)212dt2dx整理,得到微分方程为m+(k+k)x=F(t)212dtX(s)1传递函数为G(s)==2F(s)ms+(k+k)12解毕。9
(b)忽略重力,设中间变量质量m1的位移量为yx,应用牛顿第二定律ma=∑F,写出运动平衡方程如下。对于质量m有1••my=−k(y−y)−k(y−y)1x1xi2xo对于质量m有2•••my=−k(y−y)−fy2o2oxo化简消去中间变量y,得到输入为位移y,输出为质量m的位移y的微分方程为xx2o432dydydydyoooomm+mf+[mk+m(k+k)]+f(k+k)+1241312212212dtdtdtdt2+[k(k+k)−k]y=kky2122o12i传递函数为kk12G(s)=4322mms+mfs+[mk+m(k+k)]s+f(k+k)s+[k(k+k)−k]12112212122122解毕。2-9画出下面电网络的结构图,并化简求取传递函数。C1R1R1R2C1C2uiuouiuoC2R2(a)(b)习题2-9题解:(a)设电容C2的电位为ux,得到如下算子方程组u−uio=i1C1Cs1u−uix=iR1R1i+i=iC1R11i=uxCs2u+Ri=ux2C1o依照方程组的变量关系得到结构图如图所示。10
由梅逊公式化简该结构图共有3个前向通路C11p=RCs,p=,p=12123CRCs212共有3个独立回路C11L=−RCs,L=−,L=−12123CRCs212不相接触回路RC21LL=13RC12特征式C1RC121Δ=1−(L+L+L)+LL=1+RCs+++1231321CRCsRC21212余子式1Δ=1+L=1+,Δ=1,Δ=11323RCs12传递函数为1C11RCs1(+)++21pΔ+pΔ+pΔRCsCRCs11223312212G(s)==ΔC11R2C11+RCs+++21CRCsRC212122RRCCs+(RC+RC)s+112121121=2RRCCs+(RC+RC+RC)s+11212111221(b)设电阻R2的电位为ux,得到如下算子方程组u−uix=iR1R1u−uio=i1C1Cs1i+i=iR1C1Ri=u2x1u+i=uxR1oCs2依照方程组的变量关系得到结构图如图所示。由梅逊公式化简该结构图共有3个前向通路1R2p=,p=,p=RCs12321RCsR12111
共有3个独立回路1R2L=−,L=−,L=−RCs12321RCsR121不相接触回路RC21LL=13RC12特征式1RRC221Δ=1−(L+L+L)+LL=1+++RCs+1231321RCsRRC12112余子式Δ=1+L=1+RCs,Δ=1,Δ=1132123传递函数为1R21(+RCs)++RCs2121pΔ+pΔ+pΔRCsR112233121G(s)==Δ1R2R2C11+++RCs+21RCsRRC121122RRCCs+(RC+RC)s+112122122=2RRCCs+(RC+RC+RC)s+11212122221解毕。2-10已知陀螺动力学系统的结构图R1(s)C1(s)如题图所示,试分别求取传递函数G1(s)+Cs()Cs()Cs()Cs()-1122,,以及。Rs()Rs()Rs()Rs()G4(s)G3(s)1212C2(s)-+R2(s)G2(s)题解:习题2-10按照回路化简法则,各传递函数为C(s)G(s)11=R(s)1−G(s)G(s)G(s)G(s)11234C(s)−G(s)G(s)G(s)1124=R(s)1−G(s)G(s)G(s)G(s)21234C(s)−G(s)G(s)G(s)2123=R(s)1−G(s)G(s)G(s)G(s)11234C(s)G(s)22=R(s)1−G(s)G(s)G(s)G(s)21234解毕。12
2-11题图所示的力学测量系统原理,在满足相应要求的条件下,可以用于地震测量,也可以用于测量物体的加速度,位移量y(t)和y0(t)均为相对于惯性空间的位移。y0myfk习题2-11(a)试写出以y(t)为输出量,以y0(t)为输入量的传递函数。(b)试写出用于地震测量的传递函数。(c)试写出用于加速度测量的传递函数。题解:(a)忽略重力,应用加速度第二定律ma=∑F,写出运动平衡方程为2dydydy0m=−k(y−y)−f(−)20dtdtdt则传递函数为Y(s)fs+kG(s)==2Y(s)ms+fs+k0(b)由于位移量y(t)和y0(t)均为相对于惯性空间的位移,可测量为yk=y−y0,即质量m相对于壳体的位移,则有y=y+y,代入基本方程有k022dydydyk0km(+)=−ky−f22kdtdtdt整理22dydydykk0m+f+ky=−m2k2dtdtdt相应传递函数为2Y(s)skG(s)==−Y(s)2fk0s+s+mm即可用于地震测量,一般质量m做得较大。2dy02(c)由于壳体的位移为y,其加速度为,拉氏变换为sY(s),则有可测量020dt与加速度的传递关系为Y(s)1kG(s)==−2fksY(s)20s+s+mm即可用于加速度测量,一般质量m做得较小。解毕。13
2-12惯性导航装置中的地垂线跟踪系统结构图如题图所示,试求其传递函数。s2sK3Ui(s)+-++Uo(s)K+1++11++ss--+K4K2s习题2-12题解:将结构图中的并联支路作一次化简如图s2sUi(s)+-+Uo(s)K+1+K3s+K4+11++ss--sK2应用梅逊公式求解。前向通路共有6个Ks+K1Ks+K3434p=(−s)()()=−1sss1Ks+K1Ks+K23434p=(s)()()()=2ssss211p=(s)()()=13ss11K1p=(K)()()=412sss1Ks+K1K(Ks+K)34134p=(K)()()()=513ssss11K2p=(−s)(−K)()()=62sss闭合回路共有3个1K2L=−(K)()=−12ss1Ks+K1K(Ks+K)34134L=−(K)()()()=−213ssss11K1L=−(K)()()=−312sss14
没有互不接触回路,且各回路都与各前向通路相接触,故由梅逊公式写出传递函数为p+p+p+p+p+p123456G()s=1−(L+L+L)143Ks+KKs+KKK(Ks+K)K343411342−++1+++23sssss==1KK(Ks+K)K213411+++32sss解毕。2-13分别用等价变换法与梅逊公式法化简图示各系统的结构图。G4(s)R(s)C(s)+G1(s)R(s)+C(s)++G1(s)G2(s)G3(s)-+++G2(s)--H1(s)H1(s)+-H2(s)H2(s)(a)(b)R(s)C(s)R(s)C(s)G1(s)G(s)++++-G2(s)+-+H(s)H(s)(c)(d)习题2-13题解:(a)等价变换法前向通路化简:由叠加原理有G(s)G(s)G(s)G(s)G(s)14123G(s)=,G(s)=o1o21+G(s)G(s)H(s)1+G(s)G(s)H(s)121121前向通路传递函数为G(s)G(s)+G(s)G(s)G(s)14123G(s)=G(s)+G(s)=oo1o21+G(s)G(s)H(s)121闭环传递函数为G(s)oG(s)=1+G(s)H(s)o2G(s)G(s)+G(s)G(s)G(s)14123=1+G(s)G(s)H(s)+G(s)G(s)H(s)+G(s)G(s)G(s)H(s)1211421232梅逊公式法前向通路2个p=G(s)G(s),p=G(s)G(s)G(s)1142123独立回路3个L=−G(s)G(s)H(s),L=−G(s)G(s)G(s)H(s)11212123215
L=−G(s)G(s)H(s)3142特征式Δ=1−(L+L+L)123=1+G(s)G(s)H(s)+G(s)G(s)G(s)H(s)G(s)GH(s)1211232142余子式Δ=,1Δ=112传递函数为pΔ+pΔ1122G(s)=ΔG(s)G(s)+G(s)G(s)G(s)14123=1+G(s)G(s)H(s)+G(s)G(s)H(s)+G(s)G(s)G(s)H(s)1211421232(b)等价变换法分别化简前向通路与反馈通路。前向通路为环节并联G(s)=G(s)+G(s)o12反馈通路也为环节并联H(s)=H(s)−H(s)12闭环传递函数为G(s)G(s)+G(s)o12G(s)==1+G(s)H(s)1+[G(s)+G(s)][H(s)−H(s)]o1212梅逊公式法前向通路2个p=G(s),p=G(s)1122独立回路4个L=−G(s)H(s),L=−G(s)H(s),L=G(s)H(s)111221312L=G(s)H(s)422特征式Δ=1−(L+L+L+L)1234=1+G(s)H(s)+G(s)H(s)−G(s)H(s)−G(s)H(s)11211222余子式Δ=,1Δ=112传递函数为pΔ+pΔ1122G(s)=ΔG(s)+G(s)12=1+G(s)H(s)+G(s)H(s)−G(s)H(s)−G(s)H(s)11211222(c)等价变换法相加点右移如图R(s)C(s)G1(s)++G2(s)+-G2(s)H(s)16
相加点易位如图R(s)C(s)G1(s)+++G2(s)-G2(s)H(s)环节并联化简与回路化简R(s)1C(s)G1(s)+G2(s)1+G(s)H(s)2传递函数为G(s)+G(s)12G(s)=1+G(s)H(s)2梅逊公式法前向通路2个p=G(s),p=G(s)1122独立回路1个L=−G(s)H(s)2特征式Δ=1−L=1+G(s)H(s)2余子式Δ=,1Δ=112传递函数为pΔ+pΔG(s)+G(s)112212G(s)==Δ1+G(s)H(s)2(d)等效变换法化简反馈通路得到R(s)C(s)G(s)+-H(s)1−H(s)传递函数为G(s)G(s)[1−H(s)]G(s)==cH(s)1+G(s)H(s)−H(s)1+G(s)1−H(s)梅逊公式法前向通路1个p=G(s)独立回路2个L=−G(s)H(s),L=H(s)12特征式Δ=1−L−L=1+G(s)H(s)−H(s)12余子式Δ=1−H(s)传递函数为pΔG(s)[1−H(s)]G(s)==Δ1+G(s)H(s)−H(s)解毕。17
2-14已知系统结构图如题图所示,试用梅逊公式法求取传递函数。+R(s)10+1C(s)+s+1s+-+Ks(a)+R(s)+C(s)G1(s)G2(s)+++--+(b)习题2-14题解:(a)应用梅逊公式求解4个通路1个回路1101−10ksp=L=−⋅⋅k=1sss+1ss(s+)11011010p=⋅=p=23s+1ss(s+)1s+1110−10ksp=⋅(−k)⋅=4sss+1s(s+)1传递函数为1101010ks++−p1+p2+p3+p4ss(s+)1s+1s(s+)1G(s)==1−L10ks1+s(s+)111s+(11−10k)s=2s+s+10ks(b)应用梅逊公式求解4个通路3个回路p=G(s)L=−G(s)1211p=G(s)G(s)L=−G(s)G(s)212212p=G(s)L=−G(s)3131p=−G(s)4118
传递函数为p+p+p+p1234G(s)=1−L−L−L123G(s)+G(s)G(s)+G(s)−G(s)G(s)+G(s)G(s)21211212==1+G(s)+G(s)G(s)+G(s)1+2G(s)+G(s)G(s)1121112解毕。2-15写出题图所示系统的输出表达式C()s。N1(s)N2(s)++R(s)++C(s)G1(s)G2(s)++--N3(s)H1(s)++H2(s)习题2-15题解:该题为多信号输入系统,可以应用叠加原理得到系统的输出。系统的输出为C(s)=C(s)+C(s)+C(s)+C(s)RN1N2N3G(s)G(s)12CR(s)=GR(s)N(1s)=0⋅R(s)GR(s)=1+G(s)H(s)+G(s)G(s)H(s)N(2s)=021122N(3s)=0G(s)2C(s)=G(s)⋅N(s)G(s)=N1N1R(s)=01N11+G(s)H(s)+G(s)G(s)H(s)N(2s)=021122N(3s)=0G(s)2C(s)=G(s)⋅N(s)G(s)=N2N2R(s)=02N21+G(s)H(s)+G(s)G(s)H(s)N(1s)=021122N(3s)=0−G(s)G(s)H(s)122CN3(s)=GN3(s)R(s)=0⋅N3(s)GN3(s)=1+G(s)H(s)+G(s)G(s)H(s)N(1s)=021122N(2s)=0G(s)G(s)G(s)122C(s)=R(s)+N(s)11+G(s)H(s)+G(s)G(s)H(s)1+G(s)H(s)+G(s)G(s)H(s)2112221122G(s)G(s)G(s)H(s)2122+N(s)−N(s)231+G(s)H(s)+G(s)G(s)H(s)1+G(s)H(s)+G(s)G(s)H(s)2112221122解毕。19
2-16已知系统的微分方程组描述如下,试画出结构图,并化简求取传递函数。x−x=x061x−x=x152x−x=x134dx32+=xx32dtdx505.+=xx54dtx+x=x356题解:步骤1:将微分方程组写为算子方程。微分方程为算子方程为x−=xxX(s)−X(s)=X(s)061061X(s)−X(s)=X(s)x15−=xx2152X(s)−X(s)=X(s)x13−=xx4134dx312+=xxX(s)=X(s)3232dt2s+1dx5105.+=xxX(s)=X(s)5454dt5.0s+1x+=xxX(s)+X(s)=X(s)356356步骤2:按照算子方程组的变量约束作出结构图如图所示。步骤3:应用梅逊公式化简前向通路11p=,p=122s+15.0s+111p=−,p=−342(s+1)(5.0s+)12(s+1)(5.0s+)11L=2(s+1)(5.0s+)1前向通路传递函数为p+p+p+p5.21234G(s)==o1−Ls+5.220
步骤4:结构图成为再作一次回路化简得到5.2Go(s)s+5.25.2G(s)===1+G(s)5.2s+5o1+s+5.2解毕。2-17已知系统在算子域的代数方程组描述如下,试画出系统的结构图,并化简求取传递函数。XsGsRsGsGsGsCs()=()()−()[()−()]()11178XsGsXsGsXs()=()[()−()()]22163XsGsXsGsCs()=()[()−()()]3325Cs()=GsXs()()43题解:根据算子方程作结构图如图所示应用梅逊公式计算传递函数p=G(s)G(s)G(s)G(s)1234L=−G(s)G(s)G(s)1236L=−G(s)G(s)G(s)2345L=−G(s)G(s)G(s)G(s)[G(s)−G(s)]3123478pG(s)=1−L−L−L123G(s)G(s)G(s)G(s)1234=1+G(s)G(s)G(s)+G(s)G(s)G(s)+G(s)G(s)G(s)G(s)[G(s)−G(s)]236345123478解毕。21
第3章习题及解答3-1已知某装置的电路如题图所示。输入信号为单位阶跃信号uti()=1()t时,试计算输出响应uo()t,画出uo()t的5K草图,并计算响应时间t。ui(t)5Kuo(t)s1μ题解:计算该电路的传递函数,由复数阻抗法计算得到习题3-1U(s).0005s+11s+200oG(s)===⋅U(s).001s+12s+100i输出响应的拉氏变换为1s+2001111U(s)=G(s)U(s)=⋅⋅=−⋅oi1Ui(s)=2s+100ss2s+100s输出响应为−11111−100tu(t)=L[−⋅]=(1t)−eos2s+1002响应曲线如图所示。计算响应时间:由于系统的初值为0.5,由公式t=3T,±5%s计算响应时间是不对的。由定义有1−100tu(t)=(1t)−e=.098,±2%ost=ts21−100tu(t)=(1t)−e=.095,±5%ost=ts2解出ln25t==.0032,±2%s100ln10t==.0023,±5%s100MATLAB仿真程序num=[0.0051];den=[0.011];step(num,den);[y,x,t]=step(nun,den);ti1=spline(y,t,0.98)ti2=spline(y,t,0.95)ti1=ti2=0.03220.0230解毕。21
3-2已知某检测元件响应特性为10Gs()=02.s+1为了将响应时间减小至原来的0.1倍,并保证原增益不变,采用负反馈方法来实现如题图所示,R(s)C(s)KhG(s)+-Kf习题3-2试计算图中各增益的值K、K。fh题解:结构图传递函数为C(s)KG(s)10K1hh==R(s)1+KG(s)1+10K2.0ffs+11+10Kf令增益不变,响应加快10倍,有10Kh110=1+10K2.0.002s+1fs+11+10Kf得到方程⎧10Kh⎪=10⎪1+10Kf⎨2.0⎪=.002⎪⎩1+10Kf解出K=,9.0K=10fhMATLAB仿真程序t=0:0.001:1;num1=[10];den1=[0.21];num2=[10];den2=[0.021];[y1,x1]=step(num1,den1,t);[y2,x2]=step(num2,den2,t);subplot(2,1,1);plot(t,y1);subplot(2,1,2);plot(t,y2);仿真曲线如图所示,解毕。22
3-3已知速度反馈控制系统如题图所示,为了保证系统阶跃响应的超调量M<20%,过渡时间t≤03.秒,试确定前向增益K的值和速度反馈系数K的值。ps12R(s)11C(s)K1++s+5s--K2习题3-3题解:闭环传递函数为K1G(s)=2s+5(+KK)s+K121由M<20%,t≤03.解出psζ=,5.0ω=20n由于222s+2ζωs+ω=s+20s+400nnζ=5.0ωn=20则有22s+5(+KK)s+K=s+20s+400121比较系数,解出K=400,K=.0037512SIMULINK仿真结构图MATLAB仿真程序1.5num=[400];den=[120400];step(num,den);阶跃响应[y,x,t]=step(num,den);max(y)计算峰值ans=1.1630仿真曲线如图所示。解毕。23
3-4已知系统的闭环特征方程如下,试用代数稳定性判据判别系统的稳定性。32(a)ss+++=209s20002(b)()sss++++2462()(s56).+6625=05432(c)ss++++632sss+1=0432(d)s++++81s81s65s=0题解:32(a)s+++=20s9s2000作劳斯表3s192s202001s-10s200第一列系数不全为正,系统不稳定。变号两次,有两个不稳定根。2(b)()sss++++2462()(s56).+6625=0写出多项式为432s+12s+69s+198s+866.25=0作劳斯表4s169866.253s121982s52.5866.251s00s866.25第一列系数有0出现,系统为临界稳定。5432(c)ss++++632sss+1=0作劳斯表5s1314s6213s2.670.832s0.1311s-19.70s1第一列系数不全为正,系统不稳定。变号两次,有两个不稳定根。432(d)ss++++8181ss65=0作劳斯表4s11853s8162s1651s13.50s5第一列系数全部大于零,系统稳定。24
MATLAB语言求解在MATLAB语言中是直接求根来进行判别的。32(a)s+++=20s9s20004den=[1209200];roots(den)2ans=-20.048700.0243+3.1583i0.0243-3.1583i-2有一对共轭复数根位于s的右半平面,系统不稳定。特征根的位置如图所示。-4-30-20-100102(b)()sss++++2462()(s56).+6625=0d1=[12];d2=[14];d3=[1625];d=conv(d1,conv(d2,d3));5d(5)=d(5)+666.25;roots(d)ans=0-6.0000+4.0620i-6.0000-4.0620i0.0000+4.0620i-50.0000-4.0620i有一对共轭复数根位于s平面的虚轴上,系统临-10-50界稳定。特征根的位置如图所示。5432(c)ss++++632sss+1=0den=[163211];1roots(den)ans=0.5-5.5171-0.5007+0.4636i0-0.5007-0.4636i0.2593+0.5675i-0.50.2593-0.5675I有一对共轭复数根位于s的右半平面,系统不稳-1-10-50定。特征根的位置如图所示。432(d)ss++++8181ss65=0x10den=[1818165];roots(den)ans=-5.0000-1.0000-1.0000+0.0000i(-1.0000+.71920e-5*i)-1.0000-0.0000i(-1.0000-.71920e-5*i)系统的特征根全部位于s平面的左半平面,系统是稳定的。特征根的位置如图所示。解毕。25
3-5实验测得单位反馈控制系统在输入信号为r()t=1()t时,其输出信号ct()的响应曲线如题图所示,试确定系统的开环传递函数。c(t)1.31.0t00.1习题3-5题解:由图所示,超调量Mp=30%,峰值时间t=1.0秒,由性能指标计算公式pζ−π1−ζ2πMp=e×100%,t=p2ω1−ζn解出⎧ζ=.0358⎨ω=33.65⎩n得到系统的开环传递函数为2ω11323.nG(s)==s(s+2ζω)s(s+24)1.n解毕。3-6题图所示机械系统,当受到F=40N力的作用时,位移量x()t的阶跃响应如图所示,试确定机械系统的参数m,,kf的值。Fkix(t)1.254m1.0fxt04习题3-6题解:图示机械系统的传递函数为1G(s)=2ms+fs+k由图所示稳态值c(∞)=1,由终值定理14040c(∞)=limsC(s)=limsG(s)R(s)=lims==12s→0s→0s→0ms+fs+ksk得到k=40N/m26
ζ−π1−ζ2ππ由超调量:M=e=254.%,峰值时间:t===4s,ppωω1−ζ2dn解出⎧ζ=4.0⎨ω=.0857⎩n所以2fk222s+s+=s+2ζωs+ω=s+.0686s+.0734nnmm解出⎧m=545.kg⎪⎨k=40N/m⎪⎩f=37.38N.s/m解毕。3-7试判别题图所示系统的稳定性。R(s)10C(s)R(s)s+110C(s)+s(s+)2+-s+-s(s+)1-2s1+10s(a)(b)习题3-7题解:(a)闭环传递函数为10G(s)=c2s+102s+10闭环特征方程为2s+102s+10=0多项式系数全部大于零(二阶系统),所以系统是稳定的。(b)闭环传递函数为10(s+)1G(s)=c32s+21s+10s+10闭环特征方程为32s+21s+10s+10=0作劳斯表3s1102s21101s9.5240s10第一列系数全部大于零,系统是稳定的。解毕。27
3-8试确定题图所示系统参数K和ζ的稳定域。R(s)KC(s)2+sss(.001++02.ζ1)-习题3-8题解:闭环传递函数为KG(s)=c32.001s+2.0ζs+s+K闭环特征方程为32.001s+2.0ζs+s+K=0由劳斯判据,作劳斯表3s0.0112s0.2ζK1s0.2ζ-0.01K0sK令第一列系数全部大于零,解出⎧ζ>0⎨⎩00,1+K>0以及α(2+K)-(1+K)=0,解出00<α<1K>-100.512α−1K=1−α满足上述条件时系统的时间响应为等幅振荡型。其关系曲线如图所示。代入特征方程解出振荡频率为1ω=1−αMATLAB仿真程序2令α=0.8时,有K=3,ω=2.236num=[33];1den=[10.79954];0impulse(num,den);单位脉冲响应曲线;roots(den)求特征值;ans=0.0000+2.2361i等幅振荡频率ω=2.236;0.0000-2.2361i-0.8000仿真曲线如图所示。系统另外有一个单根分量,在t>5秒之后,该分量衰减至零,系统为等幅振荡运动。解毕。30
3-12题图所示系统,开环传递函数中的因子(s−1)作严格对消与不严格对消时,判别系统的稳定性。R(s)s−1KC(s)+-s+1ss()−1习题3-12题解:严格对消时,闭环传递函数为KG(s)=c2s+s+K闭环特征方程为2s+s+K=0当增益K大于零时,系统总是稳定的。不严格对消时,设抵消后的余因子为ε()s−1,(1)如果余因子在分子上,则开环传递函数为Kε(s−)1G(s)=os(s+)1闭环传递函数为Kε(s−)1G(s)=c2s+1(+Kε)s−Kε闭环特征方程为2s+1(+Kε)s−Kε=0由于二次三项式的系数有负值,系统是不稳定的。(2)如果余因子在分母上,则开环传递函数为KG(s)=os(s+1)[ε(s−1)]闭环传递函数为KG(s)=c3εs−εs+K闭环特征方程为3εs−εs+K=0多项式缺项(2次项系数为零),系统是不稳定的。因此,只要是不完全抵消,系统就是不稳定的。所以,控制对象如果在s的右半平面有极点时,简单采用抵消法是不允许的。解毕。3-13已知某控制系统如题图所示,内环为正反馈,反馈系数为K,K>0,是ss不稳定的,在反馈的基础上增加前向通路比例-微分控制时,系统可以稳定,试确定(1)系统稳定时,P-D控制器参数K,T的取值条件;cc(2)当正反馈系数K=08.时,要求系统阶跃响应的超调量M=163%.和过渡时sp间t=08.秒,试确定P-D控制器参数K,T的取值。scc31
R(s)1C(s)Kc(Tcs+1)2++s-+Ks习题3-13题解:(1)闭环传递函数为K(Ts+)1ccG(s)=c2s+KTs+(K−K)cccs闭环特征方程为2s+KTs+(K−K)=0cccs如果系统稳定,应有⎧KcTc>0⎨K>K⎩cs(2)K=08.时,闭环传递函数为sK(Ts+)1ccG(s)=c2s+KTs+(K−)8.0ccc由M=163%.和t=08.秒,计算出ps⎧ζ=5.0⎨ω=10⎩n由于222s+2ζωs+ω=s+10s+100=0nn比较系数解出⎧KcTc=10⎧Kc=1008.⎨⎨K−8.0=100T=.0099⎩c⎩c系统的闭环传递函数为10s+1008.G(s)=c2s+10s+100MATLAB仿真程序num=[10100.8];den=[110100];step(num,den);仿真结果如图所示。由于闭环零点的影响,实际的阶跃响应的超调量稍大。作为比较,作没有闭环零点的阶跃响应曲线如图。解毕。32
3-14温度计的特性可以用一惯性环节1Ts+1来描述。将某种温度计置于一恒温ο水槽内,约在一分钟时,温度计的指示值达实际值的98%。如果将水槽以10C/min的速度升温,试计算该温度计的稳态指示误差。题解:由于在一分钟时,温度计的指示值达实际值的98%,所以t=4T=60ss则有T=604/=15s温度计特性为11G(s)==T=15Ts+115s+1ο水槽以10C/min的速度升温时,相当于加斜坡信号输入,即ο10οr(t)=10C/min⋅t=(C/s)⋅t60误差为10115sE(s)=R(s)−C(s)=R(s)[1−G(s)]=260s15s+1所以稳态误差为10115sοe=lims⋅E(s)=lims⋅[]=5.2Css2s→0s→060s15s+1解毕。3-15设单位反馈系统的开环传递函数如下,分别计算系统的静态位置误差系数K,静态位置误差系数K,静态位置误差系数K,并分别计算当输入为r()tt=⋅21()、pva2r()tt=2、rt()=2t时的稳态误差。50(a)Gs()=()5161ss++()K(b)Gs()=ss(.05++14)(s1)K(c)Gs()=2ss()+++454s(s0)Ks()2141++()s(d)Gs()=22ss()++21s0题解:50(a)Gs()=()5161ss++()K=limG(s)=50ps−0K=limsG(s)=0vs−02K=limsG(s)=0as−033
12r(t)=2⋅(1t)时,e=⋅2=ss1+K51p1r()t=2t时,e==∞ssKv21rt()=2t时,e==∞ssKaK(b)Gs()=ss(.05++14)(s1)K=limG(s)=∞ps−0K=limsG(s)=Kvs−02K=limsG(s)=0as−01r(t)=2⋅(1t)时,e==0ss1+Kp12r()t=2t时,e=⋅2=ssKKv21rt()=2t时,e==∞ssKaK(c)Gs()=2ss()+++454s(s0)K=limG(s)=∞ps−0KK=limsG(s)=vs−02002K=limsG(s)=0as−01r(t)=2⋅(1t)时,e==0ss1+Kp1400r()t=2t时,e=⋅2=ssKKv21rt()=2t时,e==∞ssKaKs()2141++()s(d)Gs()=22ss()++21s0K=limG(s)=∞ps−0K=limsG(s)=∞vs−02KK=limsG(s)=as−01034
1r(t)=2⋅(1t)时,e==0ss1+Kp1r()t=2t时,e==0ssKv2140rt()=2t时,e=⋅4=ssKKa解毕。3-16带有扰动信号输入的控制系统其结构图如题图所示,输入信号为r()t=Rt,扰动作用为N()t=N⋅1()t,R,N为常数,N(s)R(s)K++KC(s)12+-Ts1+1sTs()2+1习题3-16(1)试计算系统的稳态误差。(2)系统的环节增益K、K均为可调参数,但是其约束为KK≤K,为了减1212M小系统的稳态误差,应如何调整增益K、K的值。12题解:(1)应用叠加原理求解输入信号为r()t=Rt时,令扰动作用为零。系统为I型系统,稳态误差为Re=ssrKK12扰动作用为N()t=N⋅1()t时,令输入信号为零,其误差为Ne=lim(−c)=−ssnnt→∞K1所以稳态误差为RNR−NK2e=e+e=−=ssssrssrKKKKK12112(2)由于约束为KK≤K,令KK最大为KK=K,12M1212M令分子R−NK=02则有R1K=K=K2,1MNK2可使系统的稳态误差最小。解毕。35
3-17已知二阶系统的单位阶跃响应曲线如图所示。1.51.0810.50-0.5-100.93246二阶系统为2bs+bs+b210G(s)=2as+as+a210已知系统参数b=,0a=,2a=1及阻尼参数ζ=.0316,试确定其它未知各参数的112值,并写出确定参数后的传递函数G(s)。解1由于稳态值为0.5,由2bs+bs+b1b2100c(∞)=limc(t)=lims⋅C(s)=lims⋅⋅==5.02t→∞s→0s→0as+as+asa2100所以有b=5.0⋅a002由于初值为-1,由2bs+bs+b1210c)0(=limc(t)=lims⋅C(s)=lims⋅⋅=b=−12a2=12t→0s→∞s→∞as+as+as210a1=2b1=0所以有b=−123由于a=2及阻尼参数ζ=.0316,因此有无阻尼振荡频率1ω=10=.316n2因此有a=ω=100n4得到b=5.0⋅a=5.0×10=500系统为2−s+5G(s)=2s+2s+10解毕。3-18*已知二阶系统的单位阶跃响应曲线如题图所示,试根据响应曲线写出传递函数G(s)。36
c(t)15t03510习题3-1837
第4章习题及解答4-1设系统的开环零、极点分布如下图所示,试绘制相应的根轨迹草图。习题4-1题解:应用MATLAB语言求解该题。22100-1-2-2-202-202(a)(b)42(c)(d)36
442200-2-2-4-4-6-6-505-505(e)(f)54200-2-4-5-6-505-505(g)(h)4-2设系统的开环传递函数为Kg(1)G(s)=1(s+2.0)(s+5.0)(s+)1K(s+)2g(2)G(s)=22s+2s+10Kg(3)G(s)=12(s+1)(s+5)(s+6s+13)试绘制控制系统的根轨迹草图。题解:Kg(1)G(s)=1(s+2.0)(s+5.0)(s+)11、起点:Sstart=-0.2,-0.5,-1,终点:S∞=∞,∞,∞。2、实轴根轨迹:[-0.2-0.5],[-1∞)。3、分离点:s1=-0.8(舍去),s2=-0.334、渐近线:οο±1802(k+)1±1802(k+)1οο夹角θ===±60,±180n−m3−037
∑p−∑z2.0+5.0+1交点−σ=−=−=−.057n−m3−05、虚轴交点:将s=jω代入特征方程232s+7.1s+8.0s+1.0(+k)=0g得到1ω=±j.089440K=.126g作根轨迹图如图所示。-1MATLAB作图程序n=[1];d=conv([10.2],conv([10.5],[11]));-2-2-1012rlocus(n,d)K(s+)2g(2)G(s)=22s+2s+101、起点:Sstart=-1-3i,-1+3i,终点:S∞=-2,-∞,42、实轴根轨迹:[-2,-∞)。s2+2s+10d23、分离点:由K=−,[K]=0,ggs+2ds0解出:si1=-5.1623,si2=1.1623(舍去)-24、出射角:由幅角条件-4Kg(s+)2ο-6arg[2]=±1802(k+)1-505s+2s+10ο有arg[s+]2−arg[s+1−3j]−arg[s+1+3j]=±1802(k+)1s=−1+3jοοο即θ=μ1802(k+)1+arg[s+]2−90=1616.s=−1+3j根轨迹为圆轨迹如图所示。MATLAB程序n=[12];d=[1210];rlocus(n,d)Kg(3)G(s)=12(s+1)(s+5)(s+6s+13)1、起点:Sstart=-1,-5,-3+2i,-3-2i终点:S∞=∞,∞,∞,∞。2、实轴根轨迹:[-1,-5]。3、渐近线:ο±1802(k+)1οο1+5+6夹角θ==±45,±135,交点−σ=−=−34−04−038
4、分离点:2由于K=−(s+1)(s+5)(s+6s+13)5gd由[K]=0,解出s=-3(3重根)gds5、虚轴交点:s=±3iο06、出射角:θ=±90MATLAB程序n=[1];d1=[11];d2=[15];d3=[1613];d=conv(d1,conv(d2,d3));-5rlocus(n,d);-6-4-202解毕。4-3设控制系统的结构图如题图(a)、(b)所示。图(a)中Ks为速度反馈系数,试绘制以Ks为参变量的根轨迹图。图(b)中τ为微分时间常数,试绘制以τ为参变量的根轨迹图。R(s)10C(s)+R(s)10C(s)-+-s(s+)21+τs+s(s+)2-Kss(a)(b)习题4-3题解:(a)单位反馈系统的开环传递函数为410G(s)=2o2s+2s+10Kss010由G(s)==−1-2o2s+2s+10Kss-4参量K的等效开环传递函数为s-610Ks-505sG(s)=Do2s+2s+104令K=10K,作根轨迹如图所示。gs2(b)单位反馈系统的开环传递函数为101(+τs)G(s)=os(s+)2101(+τs)由G(s)==−1os(s+)2作参量τ的等效开环传递函数为10τsG(s)=令K=10τ,作根轨迹如图所示。解毕。Do2gs+2s+1039
4-4设系统的开环传递函数为Kg(s+10)G(s)=2(s+1)(s+4s+)8试分别绘制负反馈系统和正反馈系统的根轨迹图。题解:(1)负反馈1、起点:Sstart=-2+2i,-2-2i,-1,终点:S∞=-10,∞,∞。2、实轴根轨迹:[-1-10]。3、分离点:s1=-14.2715,不在根轨迹上,不是分离点(正反馈根轨迹的会合点)s2=-1.6143-1.1481is3=-1.6143+1.1481I均不是重根点所以,负反馈根轨迹无分离点。4、渐近线:ο±180ο夹角θ==±9021[+2(+j)2+2(−j2)]−10交点−σ=−=5.225、虚轴交点:32将s=jω代入特征方程s+5s+(12+K)s+8(+10K)=0,得到ggω=±j.4733K=104.g6、出射角:由幅角条件有ο2arg[s+10]−arg[s+]1−arg[s+4s+]8=±1802(k+)1s=−2+j2οοοϕ=μ1802(k+)1+arg[s+10]−arg[s+]1−90=−12.53sis=−2+j2作根轨迹如图所示。(2)正反馈由于正反馈根轨迹与负反馈根轨迹在s平面上是互补的,许多计算可以由互补特性计算得出。1、起点:与负反馈相同。Sstart=-2+2i,-2-2i,-1,终点:S∞=-10,∞,∞。2、实轴根轨迹:实轴段互补,(-∞-10],[-1,+∞)。3、分离点:s1=-14.2715,在根轨迹上,是会合点。4、渐近线:不用计算。5、虚轴交点:32将s=jω代入特征方程s+5s+(12+K)s+8(+10K)=0,得到ggω=0K=−8.0gοο6、出射角:由互补特性得到Φ=ϕ+180=167.47sisi40
根据互补特性将正反馈根轨迹作出。由MATLAB作图工具作根轨迹图如图所示2020101000-10-10-20-20-20020-20020(a)负反馈(b)正反馈MATLAB语言程序(a)负反馈(b)正反馈num=[110];num=[-1-10];den=[15128];den=[15128];rlocus(num,den);rlocus(num,den);解毕。4-5设非最小相位系统的开环传递函数为10K1(−0.5s)G(s)=os1(+2.0s)5试绘制该系统的根轨迹。题解:0该系统是非最小相位的,因此需要绘制正反馈的根轨迹。将开环传递函数写为-5−5.0K(s−)2K(s−)2zG(s)==o2.0s(s+)5s(s+)5-10-10010K=−5.2Kz1、起点:[0,-5],终点:[+2,∞]2、实轴根轨迹:实轴段与负反馈根轨迹互补,[-5,0],[+2,+∞)。3、分离点:s1=5.74不在根轨迹上舍去,s2=-1.74是分离点。4、渐近线:实轴,不用计算。25、虚轴交点:将s=jω代入特征方程s+5(+K)s−2K=0,解出ggw=k=[-5][10^(1/2)][-5][-10^(1/2)][0][0]根轨迹是个圆,根据上述计算作根轨迹如图所示。MATLAB程序num=[-0.51];den=[0.210];rlocus(num,den);根轨迹图如图所示。41
解毕。4-6延迟系统的开环传递函数为−τs(1)G(s)=Ke(τ=)11−τsKe(2)G(s)=(τ=,5.0p=)22s(s+p)试绘制该系统的根轨迹。题解:−τs(1)G(s)=Ke(τ=)11此题可以直接由闭环特征方程解出。闭环特征方程为−s1+Ke=0由−sKe=−1幅角条件为4ω=±π2(k+)1特征根的虚部为恒值。2k=(0,1]k=[1,+inf)幅值条件为0−sKe=1特征根的实部为K的函数,根轨迹为直线如图所示。-2−τs-4Ke-10010(2)G(s)=(τ=,5.0p=)22s(s+p)将参数代入,开环传递函数为−5.0sKeG(s)=2s(s+)21、起点,终点:有限起点:s=0,-2,无限起点:-∞(无穷多个)有限终点:无,无限终点:+∞(无穷多个)2、实轴根轨迹:[0,-2]3、实轴分离点:由dKd5.0s=[−s(s+)2e]=0dsds解出s1=-0.764s2=-5.2361(舍去)4、渐近线:由于延迟环节的多值性,当ω为定值时−5.0sKeK→0时,有∠=−2π−5.0ω=±π2(k+)1,s=σ+jωs(s+)2σ→−∞所以渐近线为:ω=μ2π2(k+)1−4π,ω=±2π,±4π,...37
−5.0sKeK→∞,有∠=-5.0ω=±π2(k+)1s=σ+jωs(s+)2σ→+∞所以渐近线为:ω=μ2π2(k+1),ω=±2π,±6π,...5、虚轴交点:特征方程为2−5.0ss+2s+Ke=0将s=jω代入方程,求得w=0,k=0,w=±1.72,k=4.54,w=±12.87,k=167.74,...作根轨迹草图如图所示。解毕。jωj6πj4πj2πσ0-2-j2π-j4π-j6πMATLAB作图:MATLAB中延迟环节可以由Pade近似展开为n阶模型,取阶数=2,作图如下:[n1,d1]=pade(0.5,2)n1=0.0202-0.24250.9699d1=0.02020.24250.9699n2=[1];d2=[120];n=conv(n1,n2)n=0.0202-0.24250.9699d=conv(d1,d2)d=0.02020.28291.45491.93990rlocus(n,d)38
1050-5-10-10-50510主周期根轨迹的形状与准确根轨迹基本相似,近似程度较好。解毕。54-7设非最小相位系统的开环传递函数为K(s+)1gG(s)=2s(s−1)(s+4s+16)0试绘制该系统的根轨迹,并确定使闭环系统稳定的Kg范围。题解:-5根据作图步骤,作出根轨迹如图所示。-50539
由劳斯判据计算临界增益,特征方程为432s+3s+12s+(K−16)s+K=0劳斯表4s112k3s3k-162s12-(k-16))/3k1s((12-(k-16))/3)*(k-16)-3k)/(12-(k-16))/3)0sk解出k^2-59k+832=0k1=23.3153k2=35.6847所以系统稳定的增益取值为23.315316/3时,根轨迹无分离点(2)a=163/时,根轨迹有一个3重分离点。(3)4T时,及T>TT123()Ts++11()Ts(Ts+1)123题解:由MATLAB语言工具求解。1(a)Gs()=,T=10及T=01.时;TsMATLAB程序num=[1];num=[1];den=[100];T=10den=[0.10];T=0.1bode(num,den);bode(num,den);040-2020-400-101-101101010101010-89-89-90-90-91-91-101-101101010101010Ts+11(b)Gs()=,T>T时,及T>TT123()Ts++11()Ts(Ts+1)123设T1=0.5,T2=5,T3=50,K=10100n=[10];d=conv([0.51],conv([51],[50,1]));bode(num,den);0解毕。-100-3-2-101101010101005-5作出下面传递函数极坐标图的-200草图。K-400(a)Gs()=10-310-210-1100101()Ts++11(Ts)12K(b)Gs()=sTs()+1KTs()+11(c)Gs()=,TT时,及TT时;-40-2001212设K=10,T1=0.1,T2=2及设K=10,T1=0.1,T2=2w=0.1:0.1:10;w=0.1:0.1:10;n=10*[0.11];n=10*[21];d=[2100];d=[0.1100];nyquist(n,d,w);nyquist(n,d,w)200200100100解毕。51
5-6已知最小相位系统的对数幅频特性如题图所示,试写出传递函数。dBL(ω)dBL(ω)0dB/dec0-20dB/decω+20ω00220220(a)(b)dBL(ω)dBL(ω)-20-4031.6ω31.6ω001010-40-20(c)(d)习题5-6题解:(a)传递函数为10G(s)=5.0s+1(b)传递函数为5.0sG(s)=.005s+1(c)设传递函数为KG(s)=s(Ts+)1K316.1由于20log=40log,解出K=100。时间常数为T==1.0,均ω=10ω=10ω10ω代入设定式得到100G(s)=s1.0(s+)1(d)设传递函数为K(Ts+)1G(s)=2sK1由于20log=0dB,解出K=100。时间常数为T==.00316,均代2ω=10ω=316.ωω入设定式得到100.0(0316s+)1G(s)=2s解毕。5-7设开环系统的极坐标图如题图所示,其中,P为s的右半平面上开环根的个52
数,ν为开环积分环节的个数,试用奈氏稳定性判据判别系统的稳定性。ImG(jω)Re-1-1-1P=0P=0P=0P=0-1ν=0ν=2ν=2ν=3(a)(b)(c)(d)-1-1-1-1P=1P=0P=1P=1ν=1ν=1ν=0ν=0(e)(f)(g)(h)习题5-7题解:(a)p=0,ν=0,稳定条件:角度增量为0。图中曲线角度增量为3π/2,所以系统是不稳定的。(b)p=0,ν=2,稳定条件:角度增量为0。由于ν=2,在无穷大半圆处作角度为ϕ=2×(π)2/的增补线后,曲线的角度增量为0,所以系统是稳定的。(c)p=0,ν=2,稳定条件:角度增量为0。由于ν=2,在无穷大半圆处作角度为ϕ=2×(π)2/=π的增补线后,曲线的角度增量为-3π/2,所以系统是不稳定的。(d)p=0,ν=3,稳定条件:角度增量为0。由于ν=3,曲线起于第二象限。在无穷大半圆处作角度为ϕ=3×(π)2/=3π2/的增补线后,曲线的角度增量为0,所以系统是稳定的。(e)p=1,ν=1,稳定条件:角度增量为pπ。由于ν=1,在无穷大半圆处作角度为ϕ=π2/的增补线后,图中曲线的角度增量为-π,所以系统是不稳定的。(f)p=0,ν=1,稳定条件:角度增量为0。由于ν=1,在无穷大半圆处作角度为ϕ=π2/的增补线后,图中曲线的角度增量为0,所以系统是稳定的。(g)p=1,ν=0,稳定条件:角度增量为pπ。图中曲线的角度增量为π,所以系统是稳定的。(h)p=1,ν=0,稳定条件:角度增量为pπ。图中曲线的角度增量为0,所以系统是不稳定的。解毕。5-8已知最小相位系统的开环对数幅频特性如题图所示,试计算开环增益K与开53
环截止频率ω的值,并写出开环传递函数。c-138dB-2-2-1ωc100ω0dB4dB-1210-2ωcω0dB2(a)(b)习题5-8题解:(a)初始斜率为-1,有一个积分环节。按照各转折频率从小到大的顺序与转折的方向,设定系统的传递函数为K0(.1s+1)G(s)=s5.0(s+1)(.001s+)1K由于20log=38dB,解出系统的开环增益为ω=2ωK=160ω10c由于20log+40log=38dB,解出系统的开环截止频率为102ω=317.1/sc系统的开环传递函数为1601.0(s+)1G(s)=s5.0(s+1)(.001s+)1(b)初始斜率为-2,有两个积分环节,一个转折频率。设定系统的传递函数为K5.0(s+)1G(s)=2sK由于20log=4dB,解出系统的开环增益为2ω=2ωK=.634ωc由于20log=4dB,解出系统的开环截止频率为2ω=.3171/sc系统的开环传递函数为.6345.0(s+)1G(s)=2s解毕。54
5-9最小相位系统的开环频率特性如题图所示,(a)试写出开环传递函数;-2(b)用奈氏判据判别闭环系统的稳定性。-130ω题解:0dB(a)设两个积分环节,一个一阶微分环节,三个310-4一阶惯性环节重叠,传递函数为1K(s+)1习题5-93G(s)=213s(s+)130K10由于20log=20log,解出开环增益为2ω=3ω3K=30则传递函数为130(s+)13G(s)=213s(s+)130(b)用奈氏判据判别闭环系统的稳定性计算系统的相位裕度,由于开环截止频率为ωc=10,所以有ο11οϕ(ω)=−180+arctanω−3arctanω=−162cωc=10ccωc=10330则系统的相位裕度为οογ=180+ϕ(ω)=18ccο相位裕度大于零。另外,ϕ(ω)ω→∞→180,则系统的幅值裕度为Lg=+∞,所以系统是稳定的。解毕。5-10已知单位反馈系统的开环传递函数为KGs()=ss()++1011(.s)试计算:(a)使得开环系统的幅值裕度L为20dB的增益K值,gο(b)使得开环系统的相位裕度γ为60的增益K值。c题解:(a)计算相位角为-180时对应的频率,由幅角式οο−90−arctanω−arctan1.0ω=−180对应频率为ωο=2.3−180令增益K=1,计算ωc=3.2时的增益为L=20logA)2.3(=−20dBω=2.355
则幅值裕度为Gm=20.83dB,(w=3.162)Pm=47.4deg.(w=0.7844)200L=−L=20dBgω=2.3即增益K=1时,幅值裕度0就满足要求。MATLAB仿真程序n=[1];-200d=[conv([11],[0.11])0];-101210101010margin(n,d);0[gm,pm]=margin(n,d);lg=20*log10(gm)-90lg=-18020.8279dB-270-360-1012(b)计算相位角为-120时10101010的频率,由幅角式οο−90−arctanω−arctan1.0ω=−120对应频率为Gm=-0.1843dB,(w=2.983)Pm=-0.3322deg.(w=3.015)100ωο=5.0−120当K=1,ω=0.5时的增益为0L(ω)=6dBK=1ω=5.0-100-2-1012所以使得开环系统的相位裕度1010101010ογc为60的增益K值为0K=−1−6dB)=5.0-90log(20dB-180解毕。-2705-11已知单位反馈系统-360-2-1012的开环传递函数为1010101010Ks()10+1Gs()=2ss()++1011(.s)作该系统的波德图草图,并由奈氏判据确定使系统临界稳定的增益K值。题解:使用MATLAB语言求解。令增益K=1。MATLAB程序num=[101];den=[0.11.1100];margin(num,den);从图上读到幅值裕度为:Lg=-0.1843dB,系统不稳定,所以临界稳定的增益为−1−.01843dBK=log[]=.0979L20dB解毕。56
5-12已知某控制系统如题图所示,试计算系统的开环截止频率ω和相位裕度cγ。c-2R(s)11C(s)50(s+)1+7s20dBωcω-7-1习题5-12题解:方法1:在折线波得图上计算。作折线波得图如图所示。由50ωc20log()=20log()2ω=7ω7得到οοω=.714γ=180+ϕ(ω)=45.57ccc由计算结果可知,有折线误差。方法2:直接由公式作解析计算。频率特性50G(jω)=o21(jω)1(+jω)7由定义50G(jω)==1o2+1ω=ωc(jω)1(jω)7得到Gm=InfdB,(w=NaN)Pm=52.23deg.(w=9.036)100ω=.903cοϕ(ω)=−127.76cγ=52.23ο0c方法3:使用MATLAB语言求解。令增益K=1。-100MATLAB程序10-1100101102num=[50/750];den=[100];margin(num,den);0从图上读到截止频率为ωc=9.063相位裕度为γc=52.23°解毕。57
Ks()−15-13已知非最小相位系统的开环传递函数为GsHs()()=,试由频域稳ss()+1定性判据判别闭环系统的稳定性。题解:5令K=1作奈氏图。num=[1-1];den=[110];nyquist(num,den);0由奈氏图可知,曲线的幅角从-270°单调减至-450°。系统为I型系统ν=1,在无穷大半圆处作角度为ϕ=π2/的增补线后,曲线的角度增量为-π,不为零,所以系统是不稳定的。-5解毕。0121+Ts5-14已知最小相位系统的开环传递函数为G(s)=,分别由折线波德图和准确波2s德图,确定相位裕度γ为45°时参数T的值。c解:令T=1做折线波德图。-2-2ωc>1ωω1-11-1(a)(b)οο由于:ϕ)1(=−180+arctan1=−135οο所以:ω=,1γ=180+ϕ(ω)=45。因此折线波德图时,T=1如图(a)所示。cccο当T=1时,准确波德图如图(b)所示ω>,1γ<45,所以有cc1120log=−3dB=20log2ω211解出:ω=24=.1189,因此T==.084如图(b)所示。cωc58
5-15最小相位系统的开环对数幅频特性如下各题图所示,(1)试分别写出题中系统I与系统II的稳态性能,并确定两系统稳态性能的优劣;(2)试分别写出题中系统I与系统II的动态性能,并确定两系统动态性能的优劣。系统I-1系统I系统II系统II-16dBω-1612ω0dB0dB36-23-1-2-2-2(a)(b)-2系统II-1-10dB68ω系统I1020ω0dB145系统II系统II系统I系统I-2-2-2-2(c)(d)解:(1)稳态性能(a)系统I:K=12,系统II:K=3,跟踪速度信号时,系统I的稳态误差小于系vv统II。(b)系统I:K=3,系统II:K=6,跟踪速度信号时,系统I的稳态误差大于系vv统II(c)系统I:K=4,系统II:K=4,跟踪加速度信号时,两系统稳态误差相等。aa(d)系统I:K=2,系统II:K=10,系统I有差跟踪位置信号,不能跟踪速度信pv号;系统II有差跟踪速度信号,无差跟踪位置信号。(2)动态性能οο(a)系统I:ω=,3γ=63,系统II:ω=,5.8γ=352.,系统I的快速性优于系cccc统II;系统II的平稳性优于系统I。οο(b)系统I:ω=,3γ=63,系统II:ω=,6γ=63,系统II的快速性优于系统ccccI;两系统平稳性相同。οο(c)系统I:ω=,4γ=196.,系统II:ω=,4γ=125.,两系统快速性相同。cccc系统II的平稳性稍优于系统I。οο(d)系统I:ω=10,γ=716.,系统II:ω=10,γ=63,两系统快速性几乎相cccc同;两系统平稳性相差不大。s+25-16已知系统的开环传递函数为GsHs()()=,试由奈氏判据证明该系2s+1统是闭环稳定的。(提示:当频率ω0:→∞时,在ω=1和ω=1处有间断点。在间−+断点处,其幅值A1()=A1()=∞)+−59
题解:50(1)由MATLAB工具作波得图。MATLAB程序0bode(num,den);num=[12];-50den=[101];-101101010波得图分析:由于二阶分母多项式的阻尼参数为零,在ω=1处,幅频特性趋于无穷大,相频特性有相-360角为-π的跳变。因为稳定裕度是对最小相位系-540统定义的,因此从特殊系统的波得图上来判别-101稳定性不太容易。101010(2)由MATLAB工具作奈氏图。MATLAB程序w=0:.1:10;4n=[12];d=[101];nyquist(n,d,w);2奈氏图分析:0从图上可以得到⎧A)0(=2⎧A(∞)=0-2⎨⎨⎩ϕ)0(=0⎩ϕ(∞)=−π2/-4且当ω增加,在ω=1时有幅值A)1(=∞,但是相位-6-10010角有跳变。即⎧⎪ϕ(ω)ω=1−=Φ⎨⎪⎩ϕ(ω)ω=1+=Φ−π稳定性判别由于p=0,ν=0,稳定条件为:角度增量为0。在图中无穷大间断点处作增补线,增补角度为-π,使得跳变点连续,则有角度增量为0,满足稳定条件,所以系统是稳定的。解毕。5-17已知带有比例-积分调节器的控制系统其结构图如题图所示,图中,参数τ,T,K,T为定值,且τ>T。试证明该系统的相位裕度γ有极大值γ,并计算当asiaccmax相位裕度γ为最大值γ时,系统的开环截止频率ω和增益K的值。ccmaxccR(s)1K1C(s)sK1(+)c+-τs1+TasTsi习题5-15题解:(1)证明该系统的相位裕度γc有极大值γcmax按照题目给定条件,系统开环传递函数写为60
KK(τs+)1csG(s)=o2τTs(Ts+)1iaKcKsο1τs+1因此∠=0,∠=−π,均为常数。在∠中,转折频率分别为2τTsTs+1ia11ω=和ω=。τTaτTa由于τ>Ta,所以有ωτ<ωT。当频率ω从0开始增加时,相位角从-180°先增后减,a11在两个转折频率ω=和ω=之间的几何中点处,ϕ(ω)有极大值ϕ(ω),所τTamaxτTa以该系统可以有最大相位裕度γcmax波得图如图所示。1000-100-202101010-100-150-200-202101010(2)计算系统为最大相位裕度γ时,系统的开环截止频率ω和增益K的值。cmaxcc11最大相位裕度γ时,开环截止频率必定位于两个转折频率ω=和ω=cmaxτTaτTa的几何中点处,则开环截止频率为ωT1ω=ωa=cτωττTa相应地,系统的增益K应满足cKK1ωτcsc20log⋅=20log=20log21τT(jω)ω=/1τTiτa解出TiK=cKτTsa解毕。61
5-18某系统的开环传递函数为Ks()+ω2Gs()=ss()+++ωωω()s(s)1342其中ω<<<ωωω,K=ωω,ω为开环截止频率。试绘制开环对数幅频特性12344ccL()ω,并确定ω的正确位置。c题解:-1根据条件ω<ω<<ωω,作出开环对数幅频-21234特性L()ω如图所示。-1ωcω3ω4ω确定ω的正确位置。0dBcω1ω2由开环传递函数有-2-32Kωωω22cK开=K=ω4ωc2=(1)ωωωωω13413由波得图,如果ω<ω<ω,解出:ω=ω,与给定条件不符合。1c223如果ω<ω<ω,ω无解。3c4c如果ω<ω<ω,有2c3K开ωcω220log=20log+40logω=ω1ωωω21解出ωω2cK=开ω1令其与式(1)相等得到ω=ωc3解毕。62
第6章习题及解答6-1有源校正网络如题图所示,试写出传递函数,并说明可以起到何种校正作用。R2R3R4R2Cui1CuuiR1Rou--R3o++(a)(b)习题6-1题解:由复数阻抗法求解(a)传递函数为KT()1+s1Gs()=−()1+Ts2R+RRR2323其中:K=,T=RCT=()+RC24,14RRR+123频率特性如图所示。由于TT,网络可以起到相位滞后与高频衰减作用。21解毕。6-2已知系统的开环传递函数为4GsHs()()=ss()+1试采用根轨迹法设计微分校正装置G()s,使得系统的超调量M<20%,过渡时间cpt<4秒,并比较校正前后系统的稳态性能。s61
题解:(1)用MATLAB语言作原系统根轨迹图。MATLAB程序2num=[4];den=[110];rlocus(num,den);根轨迹作图0a=[114];roots(a);计算闭环极点ans=-2-0.5000+1.9365i-0.5000-1.9365I-202原系统根轨迹及闭环极点的位置如图所示。(2)系统性能分析从原系统根轨迹可以得到,调整增益的大小可以调整系统的超调量Mp,由于闭环特征根的实部为常数-0.5,因此过渡时间也为常数333t====6秒>4秒sζωRe[s]5.0ni如欲减小过渡时间,闭环极点的位置需要在s平面上左移,也就是根轨迹需要左移。根轨迹的左移可以通过根轨迹的微分校正实现。(3)根轨迹微分校正计算满足给定性能的闭环极点为2s=−ζω+jω1−ζ=−1+j.1732inn⎧ζ=5.0此时⎨ω=2⎩n计算补偿角ϕ。在新的闭环极点上,幅角为4οarg[G(s)]=arg[]=−210<-180°os=−1+j.1732s(s+)1ο不满足幅角条件,需要增加校正装置G(s),使得arg[G(s)G(s)]=±180。则校ccos=si正装置应提供的补偿角为οοarg[G(s)]=±180−arg[G(s)]=30cos=si由分角法得到校正装置的零点极点如图所示。Si则校正装置的传递函数为60s+.1464G(s)=Kcc30s+.2732满足1515s+.1464οarg[G(s)]=arg[K]=30ccs=−1+j.1732s+.2732-PD-ZD-10由幅值条件确定增益补偿K(s+.1464)4cG(s)G(s)==1cos+.2732s(s+)1s=−1+j.1732解出增益补偿为K=.1183c62
校正系统的结构图为校正系统的根轨迹如图所示,校正装置使得原系统的根轨迹向左移动。51.5100.5-50-5050246作校正系统的时间仿真曲线,基本满足给定的校正设计要求。由于系统闭环零点的影响,超调量约为Mp=21%,比原设计值略大。校正前后稳态性能比较校正前:校正后:4×.1183×.1464K=4K==.254vv.2732校正后,稳态性能稍有降低。解毕。6-3系统结构图如题图所示,试用根轨迹法设计积分校正装置G()s,使得系统c的超调量Mp<5%,过渡时间ts<4秒,单位斜坡输入时的稳态误差ess<.002。R(s)KC(s)Gc(s)+-ss()++36()s习题6-3题解:(1)检验系统的动态性能。10由给定的性能要求得到⎧ζ=.0707⎨ω=.106⎩n闭环主导极点为2s=−ζω±jω1−ζ=−.075±j.075inn作原系统根轨迹图如图所示。可以确定,主导极点位于根轨迹的右边,不需要移动根轨迹,原系统的根轨迹可以满足动态性能要求。63
在原系统根轨迹上确定主导极点MATLAB程序n=[1];d=[19180];rlocus(n,d)[r,k]=rlocus(n,d);[k,r]ans=1.0e+003*......0.0123-0.0012+0.0006i-0.0012-0.0006i-0.00650.0128-0.0012+0.0007i-0.0012-0.0007i-0.0066......得到主导极点如上所示,相应地根轨迹增益为Kg=12.3den=[191812.3];roots(den)ans=-6.5329-1.2335+0.6010i-1.2335-0.6010i为主导极点。(2)检验稳态性能根轨迹增益为Kg=12.3,时系统的静态速度误差系数为Kgz123.K===.0683v3×63×6给定要求为:单位斜坡输入时的稳态误差e<.002,即Kv>50,远远不能满足要求,ss需要作积分校正来改善稳态性能。(3)设计积分校正装置积分校正装置为s+ZIG(s)=cs+PIZI令K==80,取Z=,2.0P=.00025,校正装置的传递函数为vIIIPIs+2.0G(s)=cs+.00025校正系统的开环传递函数为s+2.0123.G(s)G(s)=cos+.00025s(s+3)(s+)6静态速度误差系数为2.0×123.K==54.67>50v.00025×3×6满足给定的稳态性能要求。作校正系统的根轨迹图k=1;z=[-0.2];p=[0-3-6-0.0025];[num,den]=zp2tf(z,p,k);rlocus(num,den);与原系统根轨迹比较,积分校正基本不改变原根轨迹总体走向,只是原点附近的根64
轨迹作了改变,以补偿开环增益的不足。原点邻域的局部根轨迹如图所示。解毕。0.4100.2500-5-0.2-10-0.4-10010-0.4-0.200.2校正系统的根轨迹原点邻域的局部根轨迹6-4已知系统的开环传递函数分别为10(1)G(s)=o2s10(2)G(s)=os分别采用根轨迹同伦法设计串联校正装置G()s,使得系统的闭环极点为s=−2±j。c2,1题解:题(1)1作原系统根轨迹如图所示。开环极点为s=0,则2,122D(s)=∏(s−si)=s1i=12给定闭环主导极点为0.5s=−2±j2,10因此有2-0.52N(s)=∏(s−sj)=s+4s+5j=1-1KN(s)-0.100.1g3以G(s)=作负反馈根轨迹如图6-ojD(s)图6-23原系统根轨迹图所示。,则根轨迹的终点为希望极点的位置。65
221100-1-1-2-2-4-20-4-20(a)(b)图6-24负反馈与正反馈根轨迹图(4)再作正反馈根轨迹图如图6-24(b),令K=−1计算或作图得到不动点。由g于2D(s)=s2N(s)=s+4s+5所以由N′(s)=D(s)−N(s)=0,得到Nf(s)=s+.125,sk=−.125为一个有限不动1点。KN(s)gf(5)再以不动点为根轨迹的零点,由G(s)=作负反馈根轨迹图如图所okD(s)示,则希望极点位于根轨迹上。由图上可以看出另一个不动点位于无穷远处。21R(s)10C(s)0(4.0s+.125)2+-s-1-2-4-20(a)(b)(6)计算根轨迹过希望极点的根轨迹增益。由于K(s+.125)g=12ss=−2+j求得K=4gs=−2+j由于原系统开环增益为10,所以串联校正装置为66
G(s)=(4.0s+.125)c该校正装置为PD校正装置。加有校正装置的系统结构图如图所示。校正后系统阶跃响应的仿真曲线如图6所示。1.210.80.60.40.200123题(2)系统开环传递函数为10G(s)=os要求闭环极点两个为s=−2±j而原系统为1阶系统,故可以任意设定一个s左半2,1,平面的开环极点为s=−1(该增加的开环极点在校正后由校正装置提供),则等效开2,1环传递函数成为10G(s)=os(s+)11作等效开环系统根轨迹如图所示。221100-1-1-2-2-4-20-4-20(a)(b)开环极点为s=,0s=−1,则1232D(s)=∏(s−si)=s(s+)1=s+si=12给定希望极点为[−2+,j−2−]j,因此67
32N(s)=∏(s−sj)=(s+2+)(js+2−)j=s+4s+5j=1KN(s)g3以G(s)=,作负反馈根轨迹如图所示,则根轨迹的终点为希望极点。ojD(s)221100-1-1-2-2-4-20-4-20(a)负反馈根轨迹图(b)正反馈根轨迹图图6-28根轨迹图KN(s)g4作G(s)=的正反馈根轨迹图如图(b),则不动点在根轨迹上。ojD(s)5计算不动点,令K=−1计算或作图得到不动点。由于g2D(s)=s+s2N(s)=s+4s+5所以由N′(s)=D(s)−N(s)=0,得到N(s)=s+.1667fs=−.1667为有限不动点,另一个不动点在无穷远处。KN(s)gf6以不动点为系统零点,构造开环系统G(s)=,作负反馈根轨迹图如okA(s)图所示,则希望极点位于根轨迹上。(7)计算根轨迹过希望极点的根轨迹增益。由于K(s+.1667)g=1s(s+)1s=−2+j求得K=3gs=−2+j考虑到原系统开环增益为K=10,以及提供系统s=−1的开环极点,得到串联校正go装置为68
(3.0s+.1667)G(s)=cs+1该装置为一滞后校正装置。校正后系统的结构图与时间响应如图所示。R(s)(3.0s+.1667)10C(s)+-s+1s图6-29校正系统的结构图21.51100.5-1-20-4-200123(a)校正系统的根轨迹图(b)校正后的时间响应69
6-5已知系统的开环传递函数为K()s+2GsHs()()=ss()+1当调整根轨迹增益K时,可以获得其阶跃响应在欠阻尼条件下各种满意的动态性能。试确定满足下述要求的增益K值(a)系统具有最大的超调量M时;pmax(b)系统具有最大的阻尼振荡频率ω时;dmax(c)系统响应时间最快的t时;smin(d)系统的斜坡响应具有最小的稳态误差e时;ssmin题解:4应用MATLAB工具作系统的根轨迹图。MATLAB程序Mp,maxp=[0-1];z=[-2];k=1;2[num,den]=zp2tf(z,p,k);wd,maxrlocus(num,den);BA根轨迹如图所示。C0(a)系统具有最大的超调量Mpmax系统的闭环极点在阻尼角β为βmax时具有最ts,min大的超调量Mp,即图中原点的射线与根轨迹相-2max-4-202切的切点A处,计算此时的增益[r,kg]=rlocus(num,den);b=-atan(imag(r(:,2)).*real(r(:,2)).^(-1))*180/pi;[kg,b]ans=kgb............0.661243.75630.888744.90021.175244.8129............得到1.5K=.08887k=2.0Mp比较gMpmaxk=0.88K取不同值时,超调量变化的时间仿真曲线如1图所示。k=0.5k=02(b)系统具有最大的阻尼振荡频率ωdmax系统的闭环极点在其虚部Im[Si]为Im[Si]max时具有最大的阻尼振荡频率ω,即图中的水平线dmax与根轨迹相切的切点B处。计算此处的增益[kg,imag(r(:,2))]ans=kgimag(r(:,2))............2.43551.38582.81551.411270
3.19841.4107............得到K=.28155gωdmax(c)系统响应时间最快的t时;smin系统的闭环极点具有最大负实部时的共轭复数极点其响应最快,即图中的C点。计算此处的增益1.5[kg,(r(:,2))]k=2.0ts比较ans=k=5.83...........15.8213-3.4106+0.1004i5.8269-3.4135+0.0464ik=1.05.8325-3.49240.5............得到0Kgt=.582690246sminTi()(d)系统的斜坡响应具有最小的稳态误差essmin系统的欠阻尼响应中其最大的根轨迹增益值满足上述要求,即图中的C点处的根轨迹增益值K=.58269gtsmin&Kvmax此处的静态速度误差系数最大,为K=.58269×2=11.6538vmax不同增益时,超调量大小和过渡时间快慢的时域仿真曲线如图所示。(注意:由于系统具有闭环零点,因此当K增大时,闭环零点的影响逐渐增大,或者说,时间响应中,微分附加分量逐渐增大。因此仿真曲线中的实际超调量是包含零点影响在内的。读者可进行微分附加分量分离后的系统分析。)解毕。71
6-6已知双T网络如题图所示,试求它们的频率特性,作出波得图,并说明作为校正装置使用有什么特点。CRRRCCuiuouiuoCR(a)(b)习题6-5题解:(a)图与(b)图的传递函数均为.03821.2618222RCs+2RCs+1RCRCRCG(s)=2220dBωRCs+3RCs+1-1+1作因式分解,频率特性为(jRCω+1)(jRCω+)1G(jω)=(j.2618RCω+1)(j.0382RCω+)1波得图如图所示。由波得图可以看出,该双T网络具有带阻作用,作为校正装置可以起到P-I-D调节器的作用。令RC=1,由MATLAB作出波得图和零点极点图如图所示。解毕。10-20.5-4-101101010020-0.50-20-1-101101010-3-2-10222RCs+2RCs+1(b)G(s)=222RCs+3RCs+16-7已知系统的开环传递函数为KGsHs()()=ss(.02+1)试采用频率法设计超前校正装置G()s,使得系统实现如下的性能指标c(a)静态速度误差系数K≥100;v(b)开环截止频率ω>30;cο(c)相位裕度γ>20。c题解:(1)检验原系统的性能,由MATLAB语言作原系统波得图。MATLAB程序令K=100num=[100];den=[0.210];72
bode(num,den)[gm,pm,wg,wp]=margin(num,den);[gm,pm,wg,wp]100ans=Inf12.7578NaN22.0829从图上可以读到,开环截止频率为0ω=22<30c0-100相位裕度为-101210101010οογ=12.76<200c0由于ω>ω,可以采用超前校正实现。cc0-100(2)计算超前校正装置计算超前装置的超前角ϕm-200οοο-1012ϕ=γ−γ+20=27.33≈3010101010mcc0计算低频衰减率α1−sinϕmα==.0331+sinϕm计算校正装置中点增益10011L=20log=.477dBz2α0确定新的开环截止频率ωcL=20logG(s)=−.477dB-1000ωc0ω=ωc-202410101010ω=290c确定校正装置的转折频率ω,ω12-100⎧ω=αω=167.⎪1c-180⎨1ω=ω=50.23-200⎪2c10-2100102104⎩α校正装置为11+jωω111+j.006ωG(jω)=K=cc121+j.002ω1+jωω2(3)检验计算结果校正系统的开环传递函数为1+.006s100G(s)=G(s)G(s)=co1+.002ss2.0(s+)173
MATLAB程序校正结果num=[6100];den=[0.004.2210];ω=293.≈30cbode(num,den);οογ=396.>20[gm,pm,wg,wp]cans=K=K=100voInf39.6692NaN29.3363满足设计要求。解毕。6-8已知系统的开环传递函数为KGsHs()()=ss(.002+1)试采用频率法设计滞后校正装置G()s,使得系统实现如下的性能指标c(a)静态速度误差系数K≥50;v(b)开环截止频率ω>10;cο(c)相位裕度γ>60。c题解:(1)检验原系统的性能令K=50,满足稳态要求。作原系统的波得图。MATLAB程序100num=[50];den=[0.0210];bode(num,den);0[gm,pm,wg,wp]=margin(num,den);[gm,pm,wg,wp]-100-2024ans=10101010Inf51.8273NaN39.30760开环截止频率为ω=393.>10-100c0相位裕度为οο-200γc0=51.83<60-202410101010由于ω<ω,可以采用滞后校正。cc0(2)计算滞后校正装置确定开环截止频率ωc在原波得图上选取满足相位裕度的频率作为ω,初选ω=20,则ccοοογ=180+ϕ(ω)=682.>60cω=20确定新的开环截止频率为ω=20c计算高频衰减率β由于L(ω)=8dB,在ω=20处校正装置要将原幅频特性衰减为0dBω=20cL(ω)=20logβ=8dBω=20所以有β=5.274
确定校正装置的转折频率ω,ω12⎧1ω=ω=22c⎪⎪10⎨1⎪ω=ω=8.012⎪⎩β校正装置为11+jωω1+j5.0ω2G(jω)==c11+j.125ω1+jωω1(3)检验计算结果校正系统的开环传递函数为1+2.0s50G(s)=G(s)G(s)=co1+5.0ss.0(02s+)1num=[1050];Gm=InfdB,(w=NaN)Pm=60.35deg.(w=19.19)den=[0.010.5210];100margin(num,den);作图结果开环截止频率为0ω=19.15>10c相位裕度为οο-100γ=60.35>60-2024c10101010速度误差系数为0K=K=50vo满足设计要求。-90解毕。-180-270-360-2024101010101+Ts16-9已知单位反馈系统的结构图如题图所示,其中K为前向增益,为超前1+Ts2校正装置,T>T,试用频率法确定使得系统具有最大相位裕度的增益K值。12R(s)1+Ts1C(s)1K2+1+Tss-2习题6-8题解:75
由于T>T,其波得图如图所示。-2121当开环截止频率为两转折频率的几何中点时,系统有-1T0dBωc2ω最大的相位裕度γ。cmax1K所以开环截止频率为T1-21111ω==cT1T2T1T1T2又,斜率为-40dB/dec的特性其延长线与0dB线的交点其值为K,所以有ωKc20log=40log1T1T11解出1K=TTT112解毕。6-10设单位反馈控制系统的开环传递函数为KGs()=s+1试采用二阶参考模型法设计校正装置G()s,使得校正后实现下述性能指标c(a)静态速度误差系数K≥10;v(b)阶跃响应的过渡时间t<04.秒;s题解:满足稳态性能,取K=10作原系统特性Lo如图所示。取ωc=10作二阶参考特性L参如图所示。校正装置特性为:L校=L参-Lo,如图所示,则L参校正装置的传递函数为Lo-1ω20s+1G(s)=0dBcs.0(05s+)1110L校解毕。-26-11已知单位反馈系统的开环传递函数如下所示,试依照二阶参考模型作系统校正,使得系统的调节时间t<5.0秒。s12(1)G(s)=os(s+5.0)(s+)4(5s+)1(2)G(s)=o2s题解:76
12(1)G(s)=+2L校os(s+5.0)(s+)4-1+1将开环传递函数写为0dB612ω60.54G(s)=L参os2(s+1)(.025s+)1Lo-3-2作原系统波得图Lo如图所示。3给定t=<5.0秒,依照ω=6作二阶参考模型L参,则校正装置为L校=L参-Lo,scωc如图所示。校正装置的传递函数为2(s+1)(.025s+)1G(s)=c.0083s+1解毕。(5s+)1(2)G(s)=o2s作原系统波得图Lo如图所示。-23给定ts=<5.0秒,依照ωc=6作二阶参考L参-1ωc6120dBω模型L参,则校正装置为L校=L参-Lo,如图所示。1-1校正装置的传递函数为+1L校Lo1.2s-2G(s)=c(s+1)(0.083s+)1解毕。K6-12设角位移伺服系统的开环模型为Gs()=,试采用四阶参考模ss(.02+1)型法设计校正装置G()s,使得校正后实现下述性能指标c(a)静态速度误差系数K≥200;v(b)阶跃响应的过渡时间t<04.秒;s(c)阶跃响应的超调量M<30%;p并计算相位裕度γ的大小。c题解:(1)满足稳态精度,令K=200,作原系统的波得图Lo如图所示。ο原系统开环截止频率为ω=316.,相位裕度为γ=9。系统虽然是稳定的,但c0c0是存在严重的振荡。(2)估算四阶参考模型参数计算开环截止频率ωc,给定t<04.s1ω≥6(~)8取ω=20,作斜率为-20dB的斜线。ccts,计算中频段宽度h,给定M<30%p77
Mp%+6430+64h===7.6取h=8。Mp%−1630−16,确定各转折频率1ω=ω=.707≈72chω=hω=566.≈603c过ω=7作斜率-40dB的斜线与原系统波得图低频段相交,求得第一衔接点为21ω=ω=7.01210取ω的2倍频作为ω34ω=2ω=12043作参考特性L参如图所示,校正装置的特性为L校,L校=L参-Lo如图所示。-1Lo(ω)-2-2L参(ω)31.60dB-160120ω0.75720-1+1-2L校(ω)-3校正装置的传递函数为2.0(s+1)(.0143s+)1G(s)=c.1(43s+1)(.0017s+1)(.00084s+)1(3)校验校正设计结果MATLAB仿真程序100num=[200];den=[0.210];n=num*conv([0.21],[0.1431]);dc=conv([1.431],conv([0.0171],...0[0.00841]));d=conv(den,dc);bode(n,d);-100[n1,d1]=cloop(n,d,-1);-202410101010step(n1,d1);[gm,pm,wg,wp]=margin(num,den);[gm,pm,wg,wp]ans=7.467444.516576.708919.4143校正后,开环截止频率为ω=194.cοο相位裕度为γ=45>>γ=9cc0时域仿真结果如图所示。超调量Mp约为30%,过渡时间约为0.4秒,且大大减小了振荡。78
21.51.5110.50.50001200.5(a)校正前阶跃响应仿真(b)校正后阶跃响应仿真解毕。6-13设受控对象的开环模型为KGs()=ss()++1011(.s)试采用四阶参考模型法设计校正装置G()s,使得校正后实现下述性能指标c(a)静态速度误差系数K≥80;v(b)开环截止频率ω>2;c题解:(1)满足稳态精度,令K=80,作原系统的波得图Lo如图所示。ο原系统开环截止频率为ω=9.8,相位裕度为γ=−35。系统不稳定。c0c0(2)计算四阶参考模型参数由于仅给定了开环截止频率ω>2的性能指标,所以计算如下c令开环截止频率ω=4,满足开环截止频率要求。令中频段宽度h=6,保证稳定c性要求。确定各转折频率1ω=ω=6.12chω=hω=10(为原系统转折)3c过ω=6.1作斜率-40dB的斜线与原系统波得图低频段相交,求得第1衔接点为21ω=ω=.0081220过ω=10作斜率-40dB的斜线与原系统波得图高频段相交,求得第4衔接点为3ω=2ω=2043作参考特性L参如图所示,校正装置的特性为L校,L校=L参-Lo如图所示。79
-1Lo(ω)-2-2L参(ω)8.9-10dB1020ω0.08-111.64+1-2L校(ω)-3校正装置的传递函数为(s+1)(.0625s+)1G(s)=c(125.s+1)(.005s+)1(3)校验校正设计结果开环截止频率为ω=4>2cο相位裕度为γ=362.c解毕。6-14设受控对象的开环模型为126G(s)=s1.0(s+1)(.001s+)1试采用四阶参考模型法设计校正装置G()s,使得校正后实现下述性能指标c(a)输入速度信号为1rad/s时,稳态误差误差系数e2cο相位裕度为γ=362.c解毕。81
6-15随动系统的开环对数幅频特性如题图所示。将系统I的频带加宽一倍成为系统II,(a)写出串联校正装置的传递函数G()s;c(b)比较两系统的动态性能和稳态性能有何不同。III-1-2-1101530ω0dB0.5123.16-2-3习题6-14题解:(3.6s+)1(a)系统I传递函数为GoI(s)=s2(s+1)(1.0s+1)(.0067s+)1125.0(6.s+)1系统II传递函数为GoII(s)=s(s+1)(.005s+1)(.0033s+)12(2s+1)(5.0s+1)(1.0s+1)(.0067s+)1则校正装置的传递函数为Gc(s)=2(s+)1.0(05s+1)(.0033s+)1校正装置的波德图III1.5-1系统II系统I-215101-120ω0dB0.512300.53.16-2-300123(b)比较两系统的性能动态性能两系统的相位裕度相同γ=γ,阶跃响应的超调量相同。cIcII开环截止频率ω=2ω,系统II的响应速度比系统I快1倍。cIIcI稳态性能系统II的开环增益K=126.,系统I的开环增益K=3.6,则单位斜坡输入时的稳oIIoI态误差分别为e=/1126.=.008e=3.6/1=.016ssII,ssI稳态精度提高1倍。两系统的阶跃响应曲线的比较如图所示,解毕。82
83
6-16已知最小相位系统的三阶参考模型,其折线对数幅频特性如题图所示。主要特点:(a)斜率变化为2-1-2型;-2h(b)ω,ω为两个转折频率;12-1(c)ωc为两个转折频率的几何中点;0dBωcω2ω(d)中频段宽度为h=ω/ωω121;-2(e)具有相位裕度极值γc,max。现有一系统开环传递函数为习题6-152G(s)=,os1(+.025s)要求依照三阶参考模型,满足:ω=,4h=4,设计校正装置G(s)。cc题解作原系统波德图与三阶参考模型如图所示LcL-2Lo-10dB48ω2-2-22原系统为G(s)=os1(+.025s)1(8+5.0s)3阶参考模型为G(s)=开2s1(+.0125s)由波德图,Lc=L开-Lo,求得:5.0(4s+1)(.025s+)1G(s)=cs1(+.0125s)84
6-17控制系统如题图所示,试作复合校正设计,使得Gr(s)R(s)K++2C(s)+s+1ss(.05+1)-习题6-17(1)系统的超调量M<20%,确定前向增益值K。p(2)设计输入补偿器G(s),使得该系统可以实现II型精度。r题解:(1)由MATLAB作系统的根轨迹图如图所示。42100.5-2-40-6-4-20051015MATLAB程序n=[1];d=[1320];rlocus(n,d);由给定的超调量M<20%可以得到pοζ>.0455,β<62则由根轨迹图上读到r=-0.3376+0.5623ikg=1.0K=kg/4=0.25时域仿真结果如图所示。(2)初取G(s)为理想的全补偿即r12G(s)==.025s+5.0srG(s)0此时E(s)≡0。由于全补偿时G(s)为二阶的,因此取二次项系数为零,即取rG(s)=5.0sr此时,闭环传递函数为85
22s+2s+1G(s)=c32s+3s+2s+1系统的误差为32s+sE(s)=1[−G(s)]R(s)=R(s)c32s+3s+2s+11如果输入信号为斜坡信号,r(t)=t,R(s)=,稳态误差为2s32s+s1e=lims⋅E(s)=lims⋅⋅=0ss322s→0s→0s+3s+2s+1s系统具有II型精度。或者,由闭环传递函数G(s)求得单位反馈的等效开环传递函数为c2G(s)2s+2s+1cG(s)==Do21−G(s)s(s+)1c前向通路中有两个积分环节,该系统为II型系统,斜坡信号输入时,可以使得稳态误差为零。斜坡响应的仿真曲线如图所示。解毕。121086420051026-18设控制系统如题图所示,为了将环节的频带宽度增加一倍再作校正设计,试s+1设计局部闭环结构。R(s)K21C(s)+01.s+1s+1s-习题6-17题解:设局部反馈回路如图所示,86
2Kh+-s+1Kf传递函数为2K1hG(s)=1+2K1fs+11+2Kf2Kh1⎧Kf=5.0令=2和=5.0,解出:⎨,传递函数为1+2Kf1+2Kf⎩Kh=22G(s)=5.0s+1增益与原来相同,频带宽度展宽了一倍。增加局部反馈后的结构图如图所示。局部反馈R(s)K21C(s)+-01.s+1+-s+1s0.587
第7章习题及解答7-1设某非线性控制系统如题图所示,试确定自持振荡的幅值和频率。R(s)110C(s)+--1s(s+1)(s+)2习题7-1题解:图示非线性特性为继电特性,其描述函数为0.54MNX()=πX是输入正弦信号幅值X的函数。其负倒数特性为01πX−=−N(X)4M-0.5固有特性为10G0(s)=-1s(s+1)(s+)2-4-20令X从零变到无穷与ω从零变到无穷,分别在复平面上作出两条特性如图所示。MATLAB作图程序w=1:.1:5;g1=10*((w*i).*(w*i+1).*(w*i+2)).^(-1);x=0:.1:5;g2=-pi*x/4;plot(real(g1),imag(g1),g2,zeros(size(x)));由于非线性系统的稳定条件为1G(s)=−0N(X)图中被奈氏曲线包围的部分振幅增加,不被奈氏曲线包围的部分振幅减小,因此在两曲线交点处形成极限环。计算极限环振荡的频率ωx与振幅Xω:计算ω的MATLAB程序xw=1:.01:2;g1=10*((w*i).*(w*i+1).*(w*i+2)).^(-1);wx=spline(imag(g1),w,0)wx=1.4142g1x=10*((wx*i).*(wx*i+1).*(wx*i+2)).^(-1)g1x=-1.6667-0.0000i计算结果中,奈氏曲线穿过负实轴时有wx=1.4142g1x=-1.6667所以极限环振荡频率为ω=.141x79
计算X的MATLAB程序ωx=1.5:.01:2.5;g2=-pi*x/4;xw=spline(g2,x,g1x)xw=2.1221计算结果中,当负实部的长度为-1.6667时,Xω为2.1221,所以极限环振荡幅值为Xω=2.1221极限环振荡参数为ωx=1.4142Xω=2.1221解毕。7-2设题图所示非线性系统,试应用描述函数法分析当K=10时系统的稳定性,并确定临界稳定时增益K的值。R(s)1KC(s)+-1s(s+1)(s+)2习题7-2题解:该题的非线性特性是饱和特性,其描述函数为21112N(X)=[arcsin+1−()],X≥1πXXX当X<1时,系统的传输关系为线性关系,比例为1。其负倒数特性为1π1−=−N(X)21112[arcsin+1−()]XXXK=10时固有特性为0.510G(s)=0s(s+1)(s+)20令X从1变到无穷与ω从零变到无穷,分别在复平面上作出两条特性如图所示。MATLAB作图程序-0.5w=1:.1:5;g1=10*((w*i).*(w*i+1).*(w*i+2)).^(-1);x=1:.01:5;g2=-pi/2*(asin(x.^(-1))+(x.^(-1))....*sqrt(1-x.^(-2))).^(-1);plot(real(g1),imag(g1),g2,zeros(size(x)));显然两曲线相交处产生极限环,该非线性系统是极限环稳定的。计算极限环振荡频率ω的MATLAB程序与题7-1相同,极限环振荡频率和与x负实轴交点分别为wx=1.4142g1x=-1.666780
计算X的MATLAB程序ωx=1.9:.01:2.1;g2=-pi/2*(asin(x.^(-1))+(x.^(-1)).*sqrt(1-x.^(-2))).^(-1);xw=spline(g2,x,g1x)xw=2.0331极限环振荡参数为ωx=-1.6667,Xω=2.0331当K值增加时,两曲线的交点,即极限环稳定点沿负实轴向左移动,总是极限环稳定的,临界稳定增益K临趋于无穷大。无饱和特性时,增益K=10时,由劳斯判据可判得,系统不稳定。但是,增加了饱和特性之后,系统不会发散,满足了某些特定条件下控制的需要。解毕。7-3设某非线性控制系统的结构图如题图所示,试应用描述函数法分析该系统的稳定性。为使系统稳定,非线性参数a,b应如何调整?R(s)b2C(s)+-as5.0(s+1)(s+)1习题7-3题解:该题的非线性特性是继电加死区特性。当X0⎪α+1⎨•1•⎪x=−x,x<0⎩α−1等倾线为过原点的直线族,分为上下两部分如图所示。由MATLAB语言作相平面图。SIMULINK仿真结构图,与所作的相平面图如图所示。84
•••(b)xxx++=0则等倾线方程为⎧•xx=−,x>0⎪α+1⎨•x⎪x=,x<0⎩α+1等倾线为过原点的直线族,分为左右两部分如图所示。由MATLAB语言作相平面图。SIMULINK仿真结构图,与所作的相平面图如图所示••(c)x+=Asinx0则等倾线方程为•x1=−sinxAα等倾线为正弦曲线族。等倾线和相轨迹如图所示。解毕。85
7-6设某二阶非线性系统结构图如题图所示,R(s)1KC(s)+-1s(Ts+)1习题7-6⎧e=02.0给定初始条件,⎨•,试用等倾线法作出系统的的相轨迹图。⎩e0=0题解:系统方程为⎧1e>1•••⎪Tc+c=⎨e−11⎪•••⎪⎨Te+e=e−11⎪Tα+1⎪⎪•1⎨e=−e−10h=⎨•⎪⎩−2c<0令输入信号r=0,得到分区运动方程为••••⎧⎪5.0c+c+5c=−,2c>0⎨••••⎪⎩5.0c+c+5c=+,2c<0••••••由e=−c,e=−c,e=−c,得到误差方程为••••⎧⎪5.0e+e+5e=+,2e<0⎨••••⎪⎩5.0e+e+5e=−,2e>0由于非线性的作用,系统的运动分为上下两个区。•⎧⎪e=0由方程⎨•计算系统的奇点⎪⎩f(e,e)=0•当e<0时,方程的奇点为e=4.0。•当e>0时,方程的奇点为e=−4.0。系统特征方程的根为s=−1±j3,是位于2,1s平面左半平面的共轭复数根,所以两个奇点的性质均为稳定焦点。87
••••••作变量代换u=10e±h,u=e,u=e,得到对于奇点的等倾线方程为•10u=−uα+2是过奇点的直线族,作上下分区的等倾线如图所示。r=(1t)作系统仿真,SIMULINK仿真结构图、相平面图分别如图所示。解毕。7-8某种非线性积分器,输入信号为正弦信号ut()=Asinωt时,其输入输出波i形如题图所示ui(t)uo(t)置零积分保持tm2tn2tm3t0tm1tn1积分保持置零习题7-8分段算式为⎧0ut()==0,ttim⎪1t•⎪∫tutdti()uuii><0,tmtt0,ttnο试由描述函数法证明该种非线性积分器的相位滞后角为−276.。题解:证明:给定输入正弦信号为u(t)=Asinωt,则1/4周期的积分值为i1tAπu(t)=Asinωtdt=1[−cosωt],0<ωt0T0Iut()=⎨π2πo1tωt⎪−∫ut()dt•0T0iut()<0⎩Ii得到分段函数表达式为:⎧Aπuo(t)⎪(sin−+≤ωωtt10)≤ωT2I⎪Aπωt⎪(sinωtt−≤1)ωπ≤0⎪π2πωT2Iut()=⎨oA3π⎪(sin−−≤ωπtt1)ω≤⎪ωT2习题7-9I⎪A3π(sinωtt+≤1)ωπ≤2⎪⎩ωTI2ο试由描述函数法证明该种非线性积分器的相位滞后角为0。题解:证明:由输出曲线的分段表达式可以得到,基波分量中的正弦函数项的系数为零,而余弦项的系数为2π.0637AA=u(t)cosωt⋅d(ωt)=1∫0oπωTI所以基波分量为.0637Au(t)=cosωt1ωTI写出它的描述函数为uo1(t).0637Aj0οj0ο.0637Aj0οN(jω)==(e)/(Ae)=eu(t)ωTωTiII其幅值为.0637N(jω)=ωTI幅角为0°ο∠N(jω)=0证毕。90
7-10已知二阶系统的结构图如题图所示,试采用非线性输入控制方法,使得系统单位阶跃响应的超调量为零,设计分段阶跃信号的幅值R和R,并确定切换时间t。12cR2R1t1C(s)0tc+-s(s+)5.0NIC控制器习题7-10题解:(1)计算原系统参数1.5系统的特征方程为2s+5.0s+1=01所以系统参数为⎧ζ=.0250.5⎨ω=1⎩n0性能指标为01020ζ−2π(a)原系统单位阶跃响应1−ζM=e×100%=44%pπt==.324秒p2ω1−ζn(2)由分段阶跃信号的幅值R和R的关1.512系⎧R+R=1112⎪⎪10.7⎨R1=0.51+M⎪p⎪R=1−R⎩210得到3.2401020R=,7.0R=.0312(b)分段阶跃输入响应切换时间为系统阶跃响应的峰值时间t=t=.324秒cp(3)MATLAB阶跃仿真分段阶跃信号的系统仿真曲线如图所示。解毕。91
92
第8章习题及解答8-1已知时间信号x(t)如下,试求取它们的z变换X(z)。2(1)x(t)=Acosωt(2)x(t)=t−5t−2t(3)x(t)=1−e(4)x(t)=2t⋅e−at(5)x(t)=e⋅sinbt题解:(1)x(t)=Acosωtz(z−cosωT)查z变换表,因为Z[cosωt]=,所以有2z−2cosωT⋅z+1Az(z−cosωT)X(z)=2z−2cosωT⋅z+12(2)x(t)=t查z变换表有22Tz(z+)1X(z)=Z[t]=3(z−)1−5t(3)x(t)=1−ez−atz查z变换表,Z(1[t)]=,Z[e]=,所以−aTz−1z−e−5T−5tzz1(−e)zX(z)=Z1[−e]=−=−5T2−5T−5Tz−1z−ez−1(+e)z+e−2t(4)x(t)=2t⋅e−aT−atTez查z变换表,Z[te]=,所以−aT2(z−e)−2T−2t2TezX(z)=Z2[te]=−2T2(z−e)−at(5)x(t)=e⋅sinbt查z变换表有−aT−atesinbT⋅zX(z)=Z[esinbt]=2−aT−2aTz−2ecosbT⋅z+e由MATLAB语言的符号运算工具,z变换函数“ztrans”求解。2(1)x(t)=Acosωt(2)x(t)=tf="a*cos(w*t)";f="t^2";F=ztrans(f)F=ztrans(f)F=F=z*a*(-cos(w)+z)/(1-2*z*cos(w)+z^2)z*(z+1)/(z-1)^391
−5t−2t(3)x(t)=1−e(4)x(t)=2t⋅ef="1-exp(-5*t)";f="2*t*exp(-2*t)";F=ztrans(f)F=ztrans(f)F=F=-z*(exp(-5)-1)/(z-1)/(z-exp(-5))2*z*exp(-2)/(z-exp(-2))^2−at(5)x(t)=e⋅sinbtf="exp(-a*t)*sin(b*t)";F=ztrans(f)F=exp(-a)*sin(b)*z/(-2*z*exp(-a)*cos(b)+z^2+exp(-2*a))解毕。8-2已知时间函数x(t)的拉氏变换X(s),试求取它们的z变换X(z)。−Ts5050e(1)X(s)=(2)X(s)=(s+5)(s+10)(s+5)(s+10)−Ts11−e(3)X(s)=(4)X(s)=22s(s+)1s(s+)1题解:50(1)X(s)=(s+5)(s+10)因为501010X(s)==−(s+5)(s+10)s+5s+10−5t−10tx(t)=10e−10e所以−5T−10T10z10z10(e−e)zX(z)=−=−5T−10T2−5T−10T−5T−10Tz−ez−ez−(e+e)z+ee−Ts50e(2)X(s)=(s+5)(s+10)因为501010X′(s)==−(s+5)(s+10)s+5s+10−5t−10tx′(t)=10e−10e所以−5T−10T10z10z10(e−e)zX′(z)=−=−5T−10T2−5T−10T−5T−10Tz−ez−ez−(e+e)z+ee−Ts−1又Z[e]=z,所以−5T−10T−110(e−e)X(z)=X′(z)⋅z=2−5T−10T−5T−10Tz−(e+e)z+ee92
1(3)X(s)=2s(s+)1因为1111X(s)==−+22s(s+)1sss+1−tx(t)=t−(1t)+e所以−T2−T−TTzzz(−1+T+e)z+1(−e−Te)zX(z)=−+=2−T3−T2−T−T(z−)1z−1z−ez−2(+e)z+1(+2e)z−e−Ts1−e(4)X(s)=2s(s+)1因为1111X′(s)==−+22s(s+)1sss+1−tx′(t)=t−(1t)+e所以−T2−T−TTzzz(−1+T+e)z+1(−e−Te)zX′(z)=−+=2−T3−T2−T−T(z−)1z−1z−ez−2(+e)z+1(+2e)z−e−Ts−1又,Z[e]=z,所以−1X(z)=X′(z)−X′(z)⋅z−T2−T−T−T−T−T(−1+T+e)z+1(−e−Te)z(−1+T+e)z+1(−e−Te)=−3−T2−T−T3−T2−T−Tz−2(+e)z+1(+2e)z−ez−2(+e)z+1(+2e)z−e−T2−T−T−T−T(−1+T+e)z+2(−T−2e−Te)z+1(−e−Te)=3−T2−T−Tz−2(+e)z+1(+2e)z−e由MATLAB语言的符号数学工具,拉氏反变换函数“invlaplace”和z变换函数“ztrans”求解。50(1)X(s)=(s+5)(s+10)Fs="50/(s+5)/(s+10)";ft=invlaplace(Fs)ft=10*exp(-5*t)-10*exp(-10*t)Fz=ztrans(ft)Fz=10*z*(-exp(-10)+exp(-5))/(z-exp(-5))/(z-exp(-10))−Ts50e(2)X(s)=(s+5)(s+10)Fz=10*z*(-exp(-10)+exp(-5))/(z-exp(-5))/(z-exp(-10))Fi="z^(-1)";93
Fe=symmul(Fi,Fz)Fe=10*(-exp(-10)+exp(-5))/(z-exp(-5))/(z-exp(-10))1(3)X(s)=2s(s+)1Fs="1/s^2/(s+1)";ft=invlaplace(Fs)ft=t-1+exp(-t)Fz=ztrans(ft)Fz=z*(-2*exp(-1)+z*exp(-1)+1)/(z-1)^2/(z-exp(-1))−Ts1−e(4)X(s)=2s(s+)1Fz1=Fz;Fi="z^(-1)";Fz2=symmul(Fi,Fz)Fz2=(-2*exp(-1)+z*exp(-1)+1)/(z-1)^2/(z-exp(-1))FFz=symsub(Fz1,Fz2)FFz=z*(-2*exp(-1)+z*exp(-1)+1)/(z-1)^2/(z-exp(-1))...-(-2*exp(-1)+z*exp(-1)+1)/(z-1)^2/(z-exp(-1))解毕。∗8-3已知采样信号的z变换X(z)如下,试求z反变换x(t)。z(1)X(z)=(z−1)(z−)21(2)X(z)=(z−1)(z−)2z(3)X(z)=−T−2T(z−e)(z−e)z(4)X(z)=2(z−)1(z−)2题解:z(1)X(z)=(z−1)(z−)2由于X(z)1−11==+z(z−1)(z−)2z−1z−2zzX(z)=−+z−1z−294
−1znT查z变换表,由Z[]=a得到z−anTx(nT)=−1+21(2)X(z)=(z−1)(z−)2由于111X(z)==−+(z−1)(z−)2z−1z−2zzz⋅X(z)=−+z−1z−2−1−1zz−nTZ[z⋅X(z)]=Z[−+]=−(1nT)+2z−1z−2所以−1−nTx[(n+)1T]=Z[z⋅X(z)]=−(1nT)+2−(n−)1Tx(nT)=−1[(n−)1T]+2z(3)X(z)=−T−2T(z−e)(z−e)由于X(z)1111==[−]−T−2T−T−2T−T−2Tz(z−e)(z−e)e−ez−ez−e1zzX(z)=[−]−T−2T−T−2Te−ez−ez−e−1z−anT查z变换表,由Z[]=e得到−aTz−e1−nT−2nTx(nT)=[e−e]−T−2Te−ez(4)X(z)=2(z−)1(z−)2由于X(z)1−111==−+22z(z−)1(z−)2(z−)1z−1z−2−zzzX(z)=−+2(z−)1z−1z−2查z变换表−1Tz−1znTZ[]=nT,Z[]=a2(z−)1z−a得到1nTX(nT)=(nT)−1+2T95
由MATLAB语言的符号运算工具,z反变换函数“invztrans”求解。z(1)X(z)=(z−1)(z−)2F="z/(z-1)/(z-2)";f=invztrans(F)f=-1+2^n1(2)X(z)=(z−1)(z−)2F="1/(z-1)/(z-2)";f=invztrans(F)f=1/2*Delta(n)-1+1/2*2^nz(3)X(z)=−T−2T(z−e)(z−e)F="z/(z-exp(-1))/(z-exp(-2))";f=invztrans(F);vpa(f,4)ans=4.300*.3679^n-4.300*.1353^nz(4)X(z)=2(z−)1(z−)2F="z/(z-1)^2/(z-2)";f=invztrans(F)f=-1-n+2^n解毕。8-4分别用z变换法和迭代法(解出5项以上)求解如下差分方程。(1)x(k+)2−3x(k+)1+2x(k)=u(k)输入信号:u(k)=(1k)初始条件:x)0(=,0x)1(=0(2)x(k+)2−3x(k+)1+2x(k)=0初始条件:x)0(=,1x)1(=1题解:(1)x(k+)2−3x(k+)1+2x(k)=u(k),u(k)=(1k),x)0(=,0x)1(=0z变换法:方程两边作z变换,代入初值有Z[x(k+)2−3x(k+)1+2x(k)]=Z[u(k)]2z(z−3z+)2X(z)=z−1得到输出离散序列的z变换为1zzX(z)==22(z−3z+)2z−1(z−)1(z−)2作z反变换得到差分方程的解为96
1nTX(nT)=(nT)−1+2T迭代法:写出迭代式为x(k+)2=3x(k+)1−2x(k)+u(k)迭代解为k0123456...x(k)0014112657...x(k+1)014112657120...x(k+2)14112657120247...u(k)1111111...差分方程的解序列为x(k)=0⋅δ(t)+0⋅δ(t−)1+1⋅δ(t−)2+4⋅δ(t−)3+......+9⋅δ(t−)4+20⋅δ(t−)5+43⋅δ(t−)6+...(2)x(k+)2−3x(k+)1+2x(k)=0,x)0(=,1x)1(=1z变换法:方程两边作z变换,代入初值有Z[x(k+)2−3x(k+)1+2x(k)]=022[zX(z)−zx)0(−zx1()]−[3zX(z)−zx0()]+2X(z)=022(z−3z+)2X(z)=z−2z2z−2zzX(z)==2z−3z+2z−1作z反变换得到差分方程的解为X(nT)=(1nT)迭代法:写出迭代式为x(k+)2=3x(k+)1−2x(k)迭代解为k0123456...x(k)1111111x(k+1)1111111x(k+2)1111111差分方程的解序列为x(k)=δ(t)+δ(t−)1+δ(t−)2+δ(t−)3+δ(t−)4+δ(t−)5+δ(t−)6+...MATLAB语言的符号运算求解(1)x(k+)2−3x(k+)1+2x(k)=u(k),u(k)=(1k),x)0(=,0x)1(=0在MATLAB语言中,可以调用MAPLE符号运算函数rsolve()来求解离散时间序列的差分方程。y=maple("rsolve({c(n)=3*c(n-1)-2*c(n-2)+1,c(1)=0,c(2)=0},c)")y=1/2*2^n-n(2)x(k+)2−3x(k+)1+2x(k)=0,x)0(=,1x)1(=1y=maple("rsolve({c(n)=3*c(n-1)-2*c(n-2),c(1)=1,c(2)=1},c)")y=1解毕。97
∗8-5采样控制系统如图所示,采样间隔为T=1秒,试计算其输出c(t),c(t),并画出输出信号波形c(t)。Tc*(t)Tx(t)=1(t)1c(t)s+1习题8-5题解:∗(1)计算采样输出c(t)系统传递函数为1G(s)=s+1系统的脉冲响应为−1−11−tg(t)=L[G(s)]=L[]=es+1离散式为−nTg(nT)=e脉冲传递函数为∞∞n−nTnzG(z)=∑g(nT)⋅z=∑e⋅z=−Tn=0n=0z−ez输入信号r(t)=(1t),z变换为R(z)=,则采样系统输出的z变换为z−1−Tzz1zezC(z)=G(z)R(z)=⋅=−−T−T−T−Tz−ez−11−ez−11−ez−e系统的采样输出为−T∗−11e−nTct)(=c(nT)=Z[C(z)]=⋅(1nT)−⋅e−T−T1−e1−e将采样间隔T=1秒代入求得∗−nTct)(=.158⋅(1nT)−.058⋅e(2)计算实际输出c(t)输入信号r(t)=(1t),其离散式为r(nT)=(1nT),可以写为∗rt)(=δ)0(+δ2(T)+δ3(T)+Λ其拉氏变换为∗−Ts−2Ts−3TsR(s)=1+e+e+e+Λ系统输出的拉氏变换为∗11−Ts1−2Ts1−3TsC(s)=G(s)⋅R(s)=+e+e+e+Λs+1s+1s+1s+198
系统输出的拉氏变换为−1−t−(t−T)−(t−2T)−(t−3T)ct)(=L[C(s)]=e+e+e+e+Λ由MATLAB语言作出采样输出和实际输出的波形如图所示。解毕。∗(1)采样输出c(t)(2)实际输出c(t)8-6已知系统结构图如题图所示,试求系统输出的z变换C(z)。T1R(s)110C(s)(a)ss+10T1TR(s)110C(s)(b)ss+101TR(s)110C(s)(c)ss+10习题8-6题解:(a)系统的脉冲传递函数为−10Tzz1(−e)zG(z)=Z[G(s)G(s)]=−=12−10T2−10T−10Tz−1z−ez−1(+e)z+e所以−10T1(−e)zC(z)=G(z)R(z)=⋅R(z)2−10T−10Tz−1(+e)z+e(b)系统的脉冲传递函数为两个环节脉冲传递函数的乘积G(z)=G(z)G(z)=Z[G(s)]⋅Z[G(s)]12122z10z10z=⋅=−10T2−10T−10Tz−1z−ez−1(+e)z+e所以210zC(z)=G(z)R(z)=⋅R(z)2−10T−10Tz−1(+e)z+e99
(c)由于两个环节间的采样信号为1RG(z)=Z[R(s)]1s第二个环节的脉冲传递函数为1010zG(z)=Z[]=2−10Ts+10z−e所以10z1C(z)=G(z)⋅RG(z)=⋅Z[R(s)]2−10Tz−es解毕。8-7已知系统结构图如题图所示,采样间隔为T=1秒,试求取开环脉冲传递函数∗G(z),闭环脉冲传递函数G(z),及系统的单位阶跃响应c(t)。ocR(s)T1−e−Ts11C(s)+sss+1-习题8-7题解:(1)计算开环脉冲传递函数G(z)。有零阶保持器,开环传递函数为o−Ts1−e11−Ts111G(s)=⋅=1(−e)[−+]o2sss+1sss+1开环脉冲传递函数为−1111z−1TzzzG(z)=1(−z)Z[−+]=()[−+]o22−Tsss+1z(z−)1z−1z−e−T−T−T(T−1+e)z+1(−e−Te)=2−T−Tz−1(+e)z+e将T=1秒代入,求得系统的开环脉冲传递函数为−T−Tez+1(−2e).0368z+.0264G(z)==o2−T−T2z−1(+e)z+ez−.1368z+.0368(2)计算闭环脉冲传递函数−T−Tez+1(−2e)2−T−T−T−TG(z)z−1(+e)z+eez+1(−2e)oG(z)===c−T−T2−T1+G(z)ez+1(−2e)z−z+1(−e)o1+2−T−Tz−1(+e)z+e将T=1秒代入,求得系统的闭环脉冲传递函数为.0368z+.0264G(z)=cT=12z−z+.0632100
∗(3)计算系统的单位阶跃响应c(t)z单位阶跃信号的z变换为R(z)=,所以输出响应的z变换为z−1.0368z+.0264zC(z)=G(z)R(z)=⋅c2z−z+.0632z−1z(−z+.0368)z=+2z−1z−z+.0632单位阶跃响应c∗(t)为1.5∗−1ct)(=Z[C(z)]MATLAB仿真程序1n=[0.3680.264];d=[1-10.368];0.5dstep(n,d)仿真结果曲线如图所示。解毕。0010208-8已知采样控制系统的结构图如题图所示,试确定系统的传递关系。R(s)TC(s)G1(s)G2(s)(a)+-H(s)R(s)TTC(s)G1(s)G2(s)(b)+-H(s)R(s)TC(s)G1(s)G2(s)(c)+-H(s)习题8-8题解:C(z)GG(z)12(a)=R(z)1+GGH(z)12C(z)G(z)G(z)12(b)=R(z)1+G(z)GH(z)12G(z)2(c)C(z)=RG(z)11+GGH(z)12解毕。101
8-9已知采样控制系统的结构图如题图所示,试确定系统的传递关系。TG1(s)R(s)++C(s)(a)G2(s)+-H(s)G3(s)R(s)T+-C(s)(b)G1(s)G2(s)+-H(s)习题8-9题解:(a)该题有两条通路,两个回路,分别为通路P1:输入输出变量的采样关系存在C′(z)1p==Z[G(s)G(s)]=GG(z)11212R(z)因此C′(z)=GG(z)R(z)112通路P2:输入变量的采样不是独立存在,因此传递关系为C′(z)=RG(z)22回路L1:由于采样器的存在所以有L=−GGH(z)112回路L2:由于无采样器所以有L=−G(s)H(s)22设假想采样有L=−GH(z)22总传递关系为C(z)+C(z)GG(z)R(z)+RG(z)12122C(z)==1+L+L1+GGH(z)+GH(z)12122GG(z)112=R(z)+RG(z)21+GGH(z)+GH(z)1+GGH(z)+GH(z)122122(b)应用叠加原理有GG(z)−112C(z)=R(z)C(z)=RGG(z)12231+GGH(z)1+GGH(z)1212102
总传递关系为C(z)=C(z)+C(z)12GG(z)112=R(z)−RGG(z)231+GGH(z)1+GGH(z)1212解毕。8-10已知系统的闭环特征方程如下,试判别采样系统的稳定性。(1)(z+1)(z+2.0)(z+)2=032(2)z−5.1z−.025z+4.0=0题解:(1)(z+1)(z+2.0)(z+)2=0系统的特征根分别为z=−,1z=−,2.0z=−2,其中特征根z=−2位于z平面1233的单位圆外,根据z平面的稳定判据:z<,1i=,2,1Λ,n,该系统是不稳定的。i32(2)z−5.1z−.025z+4.0=0w+1作w变换,将z=代入方程w−1w+13w+12w+1()−(5.1)−.025()+4.0=0w−1w−1w−1化简得到32−.035w+.055w+.595w+.185=0系数不全为正,所以系统不稳定。由MATLAB语言直接求解。MATLAB程序a=[1-1.5-0.250.4];roots(a)ans=1.48730.5250-0.5123三个特征根中,有一个特征根的模是大于1的,所以系统不稳定。解毕。8-11已知采样系统的结构图如题图所示,试确定K~T平面上的稳定域。R(s)TKC(s)+-s(s+)1习题8-11题解:开环传递函数为KG(s)=os(s+)1103
开环脉冲传递函数为−TK1(−e)zG(z)=o2−T−Tz−1(+e)z+e闭环脉冲传递函数为−TG(z)K1(−e)zoG(z)==c2−T−T−T1+G(z)z+[K1(−e)−1(+e)]z+eo闭环特征方程为2−T−T−Tz+[K1(−e)−1(+e)]z+e=0w+1作w变换,将z=代入方程w−1w+12−T−Tw+1−T()+[K1(−e)−1(+e)]()+e=0w−1w−1化简得到−T2−T−T−TK1(−e)w+1(2−e)w+1(2[+e)−K1(−e)]=0稳定系统,各系数均大于零−T⎧K1(−e)>0⎪−T⎨1(2−e)>0⎪−T−T1(2[+e)−K1(−e)]>0⎩解出稳定条件为⎧⎪T>0⎪⎨K>0−T⎪1(2+e)K<⎪−T⎩1−eK~T平面的关系曲线如图所示。400K300200解毕。8-12已知系统结构图如题图所示,试确定系统的稳定条件。104
R(s)T1−e−Ts11C(s)+sss+1-习题8-12题解:由于1111111⋅G(s)=⋅==[−+]22sss(s+)1s(s+)1sss+1所以1111TzzzZ[⋅G(s)]=Z[−+]=[−+]22−Tssss+1(z−)1z−1z−e带有零阶保持器时,开环脉冲传递函数为−11z−1TzzzG(z)=1(−z)⋅Z[⋅G(s)]=⋅[−+]o2−Tsz(z−)1z−1z−e−T−T−T(T−1+e)z+1(−e−Te)=−T(z−1)(z−e)闭环脉冲传递函数为−T−T−T(T−1+e)z+1(−e−Te)−TGo(z)(z−1)(z−e)G(z)==c−T−T−T1+G(z)(T−1+e)z+1(−e−Te)o1+−T(z−1)(z−e)−T−T−T(T−1+e)z+1(−e−Te)=−T−T−T−T(z−1)(z−e)+(T−1+e)z+1(−e−Te)−T−T−T(T−1+e)z+1(−e−Te)=2−Tz+(T−)2z+1(−Te)闭环特征方程为2−Tz+(T−)2z+1(−Te)=0w+1作w变换,将z=代入方程w−1w+12w+1−T()+(T−2)()+1(−Te)=0w−1w−1化简整理−T2−T−TT1(−e)w+2Tew+4(−T−Te)=0令各系数大于零有−TT1(−e)>0−T2Te>0−T4−T−Te>0解出系统的稳定条件为:105
004-T-T*exp(-T)>01.542*T*exp(-T)>05120.500005100505解毕。8-12**已知系统结构图如题图所示,试确定系统的稳定条件。R(s)T1−e−Ts1KC(s)+sss+1-习题8-12题解:由于11KK111⋅G(s)=⋅==K[−+]22sss(s+)1s(s+)1sss+1所以1111TzzzZ[⋅G(s)]=K⋅Z[−+]=K⋅[−++]22−Tssss+1(z−)1z−1z−e带有零阶保持器时,开环脉冲传递函数为−11z−1TzzzG(z)=1(−z)⋅Z[⋅G(s)]=K⋅⋅[−+]o2−Tsz(z−)1z−1z−e−T−T−TK[(T−1+e)z+1(−e−Te)]=−T(z−1)(z−e)闭环脉冲传递函数为−T−T−TK[(T−1+e)z+1(−e−Te)]−TG(z)(z−1)(z−e)oG(z)==c−T−T−T1+Go(z)K[(T−1+e)z+1(−e−Te)]1+−T(z−1)(z−e)−T−T−TK[(T−1+e)z+1(−e−Te)]=−T−T−T−T(z−1)(z−e)+K[(T−1+e)z+1(−e−Te)]106
−T−T−TK[(T−1+e)z+1(−e−Te)]=2−T−T−T−T−Tz+[K(T−1+e)−1(+e)]z+[e+K1(−e−Te)]闭环特征方程为2−T−T−T−T−Tz+[K(T−1+e)−1(+e)]z+[e+K1(−e−Te)]=0w+1作w变换,将z=代入方程w−1w+12−T−Tw+1−T−T−T()+[K(T−1+e)−1(+e)]()+[e+K1(−e−Te)]=0w−1w−1化简整理−T2−T−T−TKT1(−e)w+1[2−e−K1(−e−Te)]w−T+[(2+2K−KT)+2(−2K−KT)e]=0令各系数大于零有−TKT1(−e)>0(1)−T−T−T1[2−e−K1(−e−Te)]>0(2)−T[(2+2K−KT)+2(−2K−KT)e]>0(3)由不等式(1)有10K>0&T>0由不等式(2)有−T1−eK<5−T−T1−e−Te由不等式(3)有−T2+2eK<0−T0510T+2(+T)e−2所以特性稳定条件为K>0&T>0−T−T1−e2+2eK<&K<−T−T−T1−e−TeT+2(+T)e−2系统稳定的K,T取值为两曲线交域如图所示,107
8-13给定采样间隔为T=2.0秒,试分析题图系统的稳定性。R(s)T1−e−Ts2C(s)+-ss.0(05s+1)(1.0s+)1习题8-13题解:有零阶保持器,开环传递函数为−Ts1−e2G(s)=⋅oss.0(05s+1)(1.0s+)1−Ts−1.04.0−3.02=1(−e)[+++]2s+20s+10ss开环脉冲传递函数为−1−1.0z4.0z−3.0z2TzG(z)=1(−z)[+++]o−20T−10T2T=2.0z−ez−ez−1(z−)132.01523z+.0027z−.01713z−.00079=32z−.11537z+.01561z−.00025闭环脉冲传递函数为G(z).1495z+.02024oG(z)==c21+G(z)z+.134z+.02049o32.01523z+.0027z−.01713z−.00079=32.11523z−.11267z+.00152z−.00104闭环特征方程为32.11523z−.11267z+.00152z−.00104=0整理有32z−.09778z−.00132z−.0009=0w+13次方程,作w变换,将z=代入方程w−1w+13w+12w+1()−.09778()−.00132()−.0009=0w−1w−1w−1化简整理32w+.19688w+.1018w−.00132=0由劳斯判据可得,特征根全部位于左半平面,所以采样间隔时间为T=2.0秒时,系统是稳定的。实际上,求解方程32z−.09778z−.00132z−.0009=0的3个根为z1=-0.9819z2=-0.0937z3=0.0978全部位于单位圆内,所以系统是稳定的。解毕。108
8-14已知采样系统的闭环脉冲传递函数为C(z)z+c=2R(z)z+az+b试确定系统稳定时,参数a,b,c所应满足的关系。题解:系统的闭环特征方程为2z+az+b=0分子多项式的系数c与特征方程无关,因此与系统的稳定性无关。w+1将特征方程作w变换,将z=代入方程有w−1w+12w+1()+a()+b=0w−1w−1化简得到21(+a+b)w+2(−2b)w+1(−a+b)=0令各系数大于零有⎧1+a+b>0a⎪1⎨2−2b>0⎪b⎩1−a+b>0-11解出-1⎧b<1⎨⎩−1(+b)0,是不稳定的,ss在反馈的基础上增加前向通路比例-微分控制时,系统可以稳定,试确定(1)系统稳定时,P-D控制器参数K,T的取值条件;cc(2)当正反馈系数K=08.时,要求系统阶跃响应的超调量M=163%.和过渡时间spt=08.秒,试确定P-D控制器参数K,T的取值。sccR(s)1C(s)Kc(Tcs+1)2++s-+Ks习题3-133-14温度计的特性可以用一惯性环节1Ts+1来描述。将某种温度计置于一恒温水槽内,ο约在一分钟时,温度计的指示值达实际值的98%。如果将水槽以10C/min的速度升温,试计算该温度计的稳态指示误差。3-15设单位反馈系统的开环传递函数如下,分别计算系统的静态位置误差系数K,静态p位置误差系数K,静态位置误差系数K,并分别计算当输入为r()tt=21⋅()、r()tt=2、va2rt()=2t时的稳态误差。50(a)Gs()=()5161ss++()K(b)Gs()=ss(.05++14)(s1)K(c)Gs()=2ss()+++454s(s0)K()2141ss++()(d)Gs()=22ss()++21s0
3-16带有扰动信号输入的控制系统其结构图如题图所示,输入信号为r()t=Rt,扰动作用为N()t=⋅N1()t,R,N为常数,N(s)R(s)K++KC(s)12+-Ts1+1sTs()2+1习题3-16(1)试计算系统的稳态误差。(2)系统的环节增益K、K均为可调参数,但是其约束为KK≤K,为了减小系1212M统的稳态误差,应如何调整增益K、K的值。123-17已知二阶系统的单位阶跃响应曲线如图所示。1.51.0810.50-0.5-100.93246二阶系统为2bs+bs+b210G(s)=2as+as+a210已知系统参数b=,0a=,2a=1及阻尼参数ζ=.0316,试确定其它未知各参数的值,并112写出确定参数后的传递函数G(s)。3-18*已知二阶系统的单位阶跃响应曲线如题图所示,试根据响应曲线写出传递函数G(s)。c(t)15t03510习题3-18
4-1设系统的开环零、极点分布如下图所示,试绘制相应的根轨迹草图。习题4-14-2设系统的开环传递函数为Kg(1)G(s)=1(s+2.0)(s+5.0)(s+)1K(s+)2g(2)G(s)=22s+2s+10Kg(3)G(s)=12(s+1)(s+5)(s+6s+13)试绘制控制系统的根轨迹草图。4-3设控制系统的结构图如题图(a)、(b)所示。图(a)中Ks为速度反馈系数,试绘制以Ks为参变量的根轨迹图。图(b)中τ为微分时间常数,试绘制以τ为参变量的根轨迹图。R(s)10C(s)+R(s)10C(s)-+-s(s+)21+τs+s(s+)2-Kss(a)(b)习题4-34-4设系统的开环传递函数为Kg(s+10)G(s)=2(s+1)(s+4s+)8试分别绘制负反馈系统和正反馈系统的根轨迹图。4-5设非最小相位系统的开环传递函数为K1(−5.0s)G(s)=os1(+2.0s)
试绘制该系统的根轨迹。4-6延迟系统的开环传递函数为−τs(1)G(s)=Ke(τ=)11−τsKe(2)G(s)=(τ=,5.0p=)22s(s+p)试绘制该系统的根轨迹。4-7设非最小相位系统的开环传递函数为K(s+)1gG(s)=2s(s−1)(s+4s+16)试绘制该系统的根轨迹,并确定使闭环系统稳定的Kg范围。4-8设系统的开环传递函数为KgG(s)=02s(s+4s+a)试讨论,a取何值时,该系统的根轨迹在实轴上有:(1)无分离点,(2)一个3重分离点,(3)一个分离点与一个会合点。(4)只有一个分离点4-9设单位反馈控制系统的开环传递函数为K(s+)2gG(s)=s(s+1)(s+)4若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统的动态性能指标Mp、tp、ts、和稳态性能指标Kv。4-10单位反馈控制系统,开环传递函数为K(s+)1G(s)=o2s(s+10)(1)试作根轨迹草图。(2)确定系统闭环根全部为负实根时,增益K的取值范围。K(s+)2g4-11设单位反馈控制系统的开环传递函数为G(s)=,根轨迹图如题图所示。os(s+)1
jωC(t)s平面1jω−2−10t01(a)根轨迹图(b)单位阶跃响应习题4-11(1)当系统的阻尼振荡频率ω=1rad/s时,试确定闭环主导极点的值与相应的增d益值。(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。4-12设某随动系统的结构图如下,其中检测比较放大环节:K1=0.8v/deg,250.0156功率放大环节:G2(s)=,执行电机(含减速器):G3(s)=,.005s+1s.0(25s+)1deg/v⋅s。试用根轨迹法分析系统性能。若在系统中加入串联校正装置⎛.025s+1⎞Gc(s)=1.0⎜⎟⎝.0025s+1⎠试用根轨迹法分析系统的动态性能和稳态性能。检测比较放大R(s)功率执行C(s)K1减速器+放大电机-习题4-9
5-1计算图示电网络在输入为ut()sin=ωti时的稳态正弦输出u()t。o10μ10Kuiuo40K5-2已知系统的极坐标图如题图所示,试确定系统的传递函数。ImG(jω)ImG(jω)24Re-2-10Re0R=2-jω=10ω=2ϕ=45°(a)(b)1001005-3已知两装置的传递函数分别为Gs()=、Gs()=,作出它们的对数1205.s+105.s−1幅频特性L()ω与对数相频特性ϕ()ω,并比较有何不同。5-4作出下述传递函数的对数幅频特性L()ω与对数相频特性ϕ()ω。1(a)Gs()=,T=10及T=01.时;TsTs+11(b)Gs()=,T>T时,及T>TT123()Ts++11()Ts(Ts+1)1235-5作出下面传递函数极坐标图的草图。K(a)Gs()=()Ts++11(Ts)12K(b)Gs()=sTs()+1KTs()+11(c)Gs()=,TT时,及TT。试证明该系统的相位裕度γ有极大值γ,并计算当相位asiaccmax裕度γ为最大值γ时,系统的开环截止频率ω和增益K的值。ccmaxccR(s)1K1C(s)sK1(+)c+-τs1+TasTsi习题5-155-18某系统的开环传递函数为K()s+ω2Gs()=ss()+++ωωω()s(s)1342其中ω<<ωω<ω,K=ωω,ω为开环截止频率。试绘制开环对数幅频特性L()ω,12344cc并确定ω的正确位置。c
第6章习题6-1有源校正网络如题图所示,试写出传递函数,并说明可以起到何种校正作用。R2R3R4R2Cui1CuuiR1Rou--R3o++(a)(b)6-2已知系统的开环传递函数为4GsHs()()=ss()+1试采用根轨迹法设计微分校正装置G()s,使得系统的超调量M<20%,过渡时间t<4cps秒,并比较校正前后系统的稳态性能。6-3系统结构图如题图所示,试用根轨迹法设计积分校正装置G()s,使得系统的超调量cMp<5%,过渡时间ts<4秒,单位斜坡输入时的稳态误差ess<.002。R(s)KC(s)Gc(s)+-ss()++36()s习题6-36-4已知系统的开环传递函数分别为10(1)G(s)=o2s10(2)G(s)=os分别采用根轨迹同伦法设计串联校正装置G()s,使得系统的闭环极点为s=−2±j。c2,16-5已知系统的开环传递函数为Ks()+2GsHs()()=ss()+1当调整根轨迹增益K时,可以获得其阶跃响应在欠阻尼条件下各种满意的动态性能。试确定满足下述要求的增益K值(a)系统具有最大的超调量M时;pmax(b)系统具有最大的阻尼振荡频率ω时;dmax(c)系统响应时间最快的t时;smin
(d)系统的斜坡响应具有最小的稳态误差e时;ssmin6-6已知双T网络如题图所示,试求它们的频率特性,作出波得图,并说明作为校正装置使用有什么特点。CRRRCCuiuouiuoCR(a)(b)6-7已知系统的开环传递函数为KGsHs()()=ss(.02+1)试采用频率法设计超前校正装置G()s,使得系统实现如下的性能指标c(a)静态速度误差系数K≥100;v(b)开环截止频率ω>30;cο(c)相位裕度γ>20。c6-8已知系统的开环传递函数为KGsHs()()=ss(.002+1)试采用频率法设计滞后校正装置G()s,使得系统实现如下的性能指标c(a)静态速度误差系数K≥50;v(b)开环截止频率ω>10;cο(c)相位裕度γ>60。c1+Ts16-9已知单位反馈系统的结构图如题图所示,其中K为前向增益,为超前校正装1+Ts2置,T>T,试用频率法确定使得系统具有最大相位裕度的增益K值。12R(s)1+Ts1C(s)1K2+1+Tss-2习题6-86-10设单位反馈控制系统的开环传递函数为KGs()=s+1试采用二阶参考模型法设计校正装置G()s,使得校正后实现下述性能指标c(a)静态速度误差系数K≥10;v(b)阶跃响应的过渡时间t<04.秒;s
6-11已知单位反馈系统的开环传递函数如下所示,试依照二阶参考模型作系统校正,使得系统的调节时间t<5.0秒。s12(1)G(s)=os(s+5.0)(s+)4(5s+)1(2)G(s)=o2sK6-12设角位移伺服系统的开环模型为Gs()=,试采用四阶参考模ss(.02+1)型法设计校正装置G()s,使得校正后实现下述性能指标c(a)静态速度误差系数K≥200;v(b)阶跃响应的过渡时间t<04.秒;s(c)阶跃响应的超调量M<30%;p并计算相位裕度γ的大小。c6-13设受控对象的开环模型为KGs()=ss()++1011(.s)试采用四阶参考模型法设计校正装置G()s,使得校正后实现下述性能指标c(a)静态速度误差系数K≥80;v(b)开环截止频率ω>2;c6-14设受控对象的开环模型为126G(s)=s1.0(s+1)(.001s+)1试采用四阶参考模型法设计校正装置G()s,使得校正后实现下述性能指标c(a)输入速度信号为1rad/s时,稳态误差误差系数e0T0Iut()=⎨π2πo1tωt⎪−∫ut()dt•0T0iut()<0⎩Ii得到分段函数表达式为:⎧Aπuo(t)⎪(sin−+≤ωωtt10)≤ωT2I⎪ωtAπ⎪(sinωtt−≤1)ωπ≤0⎪π2πωT2Iut()=⎨oA3π⎪(sin−−≤ωπtt1)ω≤⎪ωT2习题7-9I⎪A3π(sinωtt+≤1)ωπ≤2⎪⎩ωTI2ο试由描述函数法证明该种非线性积分器的相位滞后角为0。7-10已知二阶系统的结构图如题图所示,试采用非线性输入控制方法,使得系统单位阶跃响应的超调量为零,设计分段阶跃信号的幅值R和R,并确定切换时间t。12c86
R2R1t1C(s)0tc+-s(s+)5.0NIC控制器习题7-1087'
您可能关注的文档
- 胡庆康《现代货币银行学教程》3版)课后习题详解.pdf
- 胡汉才编著《理论力学》课后习题答案第4章习题解答.doc
- 胡汉才编著《理论力学》课后习题答案第5章习题解答.doc
- 胡裕树_《现在汉语》课后习题答案.doc
- 胡裕树《现代汉语》教材思考和练习参考答案(完整版).pdf
- 胡运权《运筹学教程》习题答案(第一章)[1].pdf
- 自动化制造系统复习题(有答案).docx
- 自动控制原理 (胡寿松 著) 科学出版社 课后答案.pdf
- 自动控制原理 第3章习题解答.pdf
- 自动控制原理(王万良)答案.pdf
- 原理_于希宁_课后习题答案.doc
- 胡寿松第5版_课后习题及答案_完整_.doc
- 自动控制原理及其应用部分习题解答.doc
- 自动控制原理第2版王划一课后习题答案.pdf
- 自动控制原理第3版答案 孙炳达主编.doc
- 自动控制原理第二版 冯巧玲 北航第一章习题及答案.doc
- 自动控制原理第五版胡寿松主编课后习题答案详解.pdf
- 自动控制理论第四版课后习题详细解答答案(夏德钤翁贻方版).doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明