

- 953.52 KB
- 2022-04-22 11:52:06 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'《《《自动控制原理《自动控制原理》》》习题解答》习题解答浙江工业大学王万良教材:::王万良:王万良编著,,,自动控制原理,自动控制原理,,,高等教育出版社,高等教育出版社,,,2008.62009.3
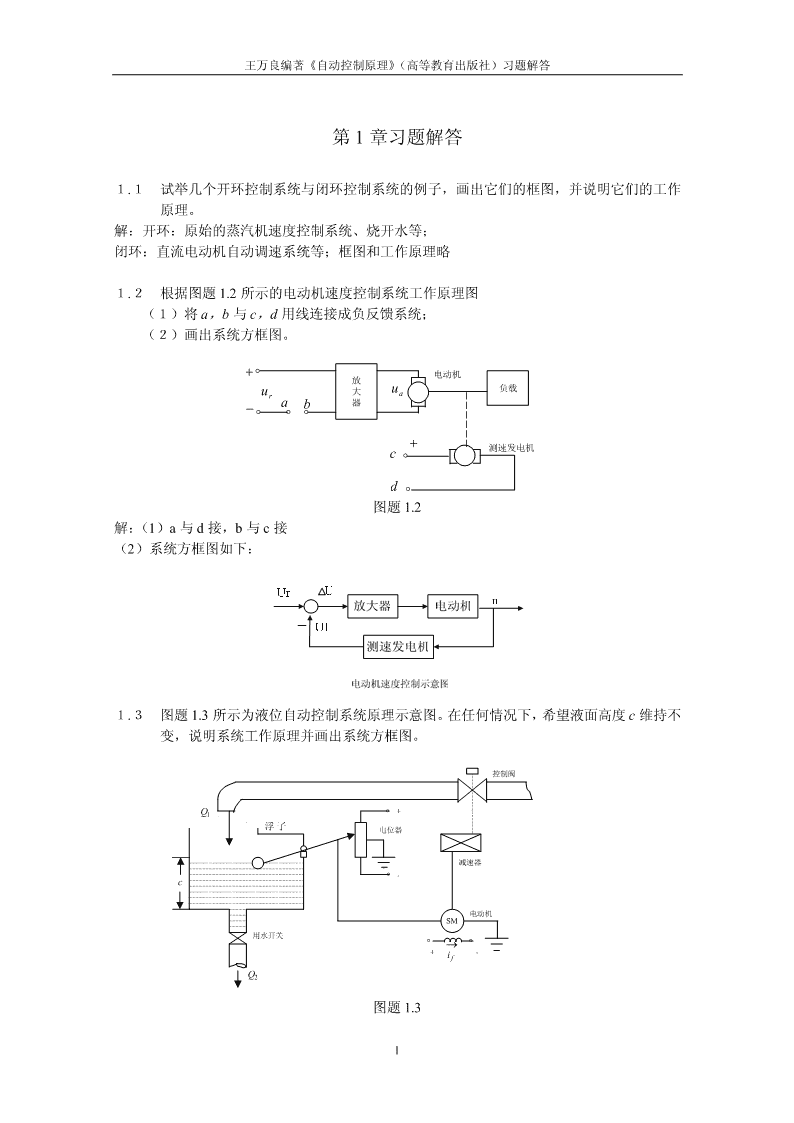
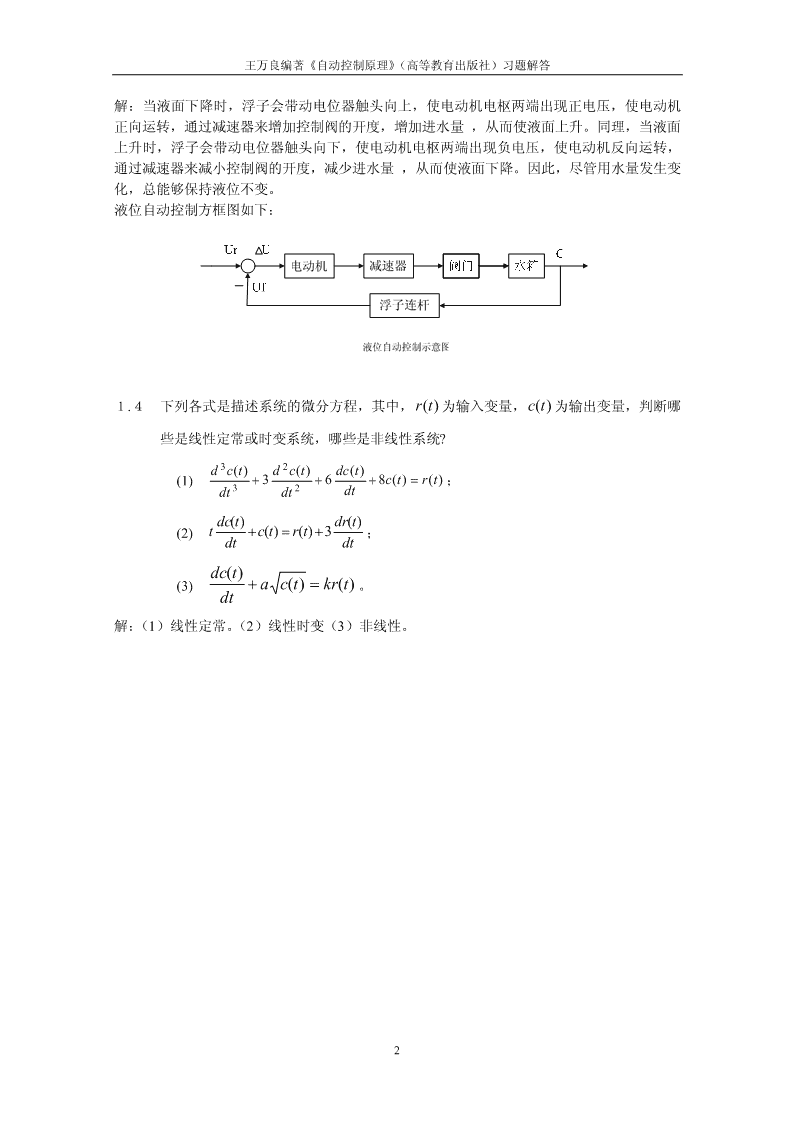
王万良编著《自动控制原理》(高等教育出版社)习题解答第1章习题解答1.1试举几个开环控制系统与闭环控制系统的例子,画出它们的框图,并说明它们的工作原理。解:开环:原始的蒸汽机速度控制系统、烧开水等;闭环:直流电动机自动调速系统等;框图和工作原理略1.2根据图题1.2所示的电动机速度控制系统工作原理图(1)将a,b与c,d用线连接成负反馈系统;(2)画出系统方框图。+o电动机放u大ua负载r-aoob器o+测速发电机codo-图题1.2解:(1)a与d接,b与c接(2)系统方框图如下:1.3图题1.3所示为液位自动控制系统原理示意图。在任何情况下,希望液面高度c维持不变,说明系统工作原理并画出系统方框图。控制阀Qo+1浮子电位器减速器o-c电动机SM用水开关oo®+i-fQ2图题1.31
王万良编著《自动控制原理》(高等教育出版社)习题解答解:当液面下降时,浮子会带动电位器触头向上,使电动机电枢两端出现正电压,使电动机正向运转,通过减速器来增加控制阀的开度,增加进水量,从而使液面上升。同理,当液面上升时,浮子会带动电位器触头向下,使电动机电枢两端出现负电压,使电动机反向运转,通过减速器来减小控制阀的开度,减少进水量,从而使液面下降。因此,尽管用水量发生变化,总能够保持液位不变。液位自动控制方框图如下:1.4下列各式是描述系统的微分方程,其中,r(t)为输入变量,c(t)为输出变量,判断哪些是线性定常或时变系统,哪些是非线性系统?32dc(t)dc(t)dc(t)(1)+3+6+8c(t)=r(t);dt3dt2dtdct)(drt)((2)t+ct)(=rt)(+3;dtdtdct)((3)+act)(=krt)(。dt解:(1)线性定常。(2)线性时变(3)非线性。2
王万良编著《自动控制原理》(高等教育出版社)习题解答第2章习题解答2.1列写图题2.1所示RLC电路的微分方程。其中,ui为输入变量,uo为输出变量。RLuiCuo图题2.1解:设电路中电流为,则:duoi=C×dtiR+Ldi+u=uoidt2duduoo整理得:LC+RC+u=u2oidtdt2.2列写图题2.2所示RLC电路的微分方程,其中,u为输入变量,u为输出变量。ioLui(t)RCuo(t)图题2.2解:设流过L的电流为i,流经R的电流为i,流经C的电流为i,则:12i+i=i121∫idt2=uo()tC,iR1=uo()tdiuo()t+L=ui()tdt2duto()Lduto()整理得:LC2++uto()=uti()dtRdt2.3列写图题2.3所示电路的微分方程,并确定系统的传递函数。其中,ui为输入变量,uo为输出变量。R1uiuoRC2图题2.33
王万良编著《自动控制原理》(高等教育出版社)习题解答解:设流过R的电流为i,流经C的电流为i,流经R的电流为i,则:1122i+i=i121iR=idt11∫2CiR=u2oiR+u=u11oidu111du整理得微分方程为:Co+(+)u=u+CioidtRRRdt121us()RRCSR+o122传递函数为:=us()RRCSR++Ri12122.4设运算放大器放大倍数很大,输入阻抗很大,输出阻抗很小。求图题2.4所示运算放大电路的传递函数。其中,ui为输入变量,uo为输出变量。RC1-i+uiuoR2图题2.4iR=u1i解:1-idt=u∫oCu()s1o整理得传递函数为:=-us()RCSi1C(s)2.5简化图题2.5所示系统的结构图,并求传递函数。R(s)R(s)C(s)G1(s)G2(s)--H1(s)H2(s)+图题2.5解:设G后为X,H前为Y,根据结构图写出线性代数方程组:11X=GRHY1(-1)Y=HC-X2C=GX2消去中间变量X,Y得传递函数为:Cs()GsGs()()=12Rs()1+GsGsHsHs()()()()-GsHs()()1212114
王万良编著《自动控制原理》(高等教育出版社)习题解答C(s)2.6简化图题2.6所示系统的结构图,并求传递函数。R(s)R(s)C(s)G1(s)G2(s)--H1(s)H2(s)图题2.6解:设G前为E,G前为X,根据结构图写出线性代数方程组:12E=RHHC-12X=GE-HC12C=XG2消除中间变量E,X得传递函数为:Cs()GsGs()()=12Rs()1+GsGsHsHs()()()()+GsHs()()121222C(s)2.7简化图题2.7所示系统的结构图,并求传递函数。R(s)G(s)1+R(s)G(s)C(s)-2图题2.7Cs()Gs()[1+Gs()]解:传递函数为:21=Rs()1+Gs()2C(s)2.8简化图题2.8所示系统的结构图,并求传递函数。R(s)G1R(s)C(s)G2ÄÄG3_ÄG4图题2.8解:设G后为X,根据结构图写出线性代数方程组:4(C+XG)4=XC=(RG1+RG2-XG)3Cs()GsGs()[()+Gs()][1-Gs()]消去中间变量得传递函数为:=3124Rs()1+GsGs()()-Gs()3445
王万良编著《自动控制原理》(高等教育出版社)习题解答C(s)2.9简化图题2.9所示系统的结构图,并求传递函数。R(s)G4R(s)C(s)Ä_Ä_G1Ä_G2G3ÄH2H1图题2.9Cs()GsGs()()+GsGsGs()()()解:传递函数为:=14123Rs()1+GsGsH()()+GsH()+GsGsH()()+GsGsGsGsGs()()+()()()1214223214123C(s)2.10简化图题2.10所示系统的结构图,并求传递函数。R(s)G3(s)+R(s)+C(s)G1(s)G2(s)-G4(s)图题2.10Cs()GsG()[()s+Gs()]解:传递函数为:=123Rs()1+GsG()()sG()s124C(s)2.11简化图题2.11所示系统的结构图,并求传递函数。R(s)-R(s)C(s)G1(s)G2(s)--H(s)1图题2.11Cs()GsGs()()解:传递函数为:=12Rs()1+Gs()+Gs()+GsGsH()()121216
王万良编著《自动控制原理》(高等教育出版社)习题解答2.12求图题2.12所示系统结构图的传递函数Cs()/()Rs。R(s)C(s)ÄG1(s)G2(s)-Gs()Ä3ÄHs()图题2.12解:设负反馈处的传递函数为T(s)R(s)C(s)G1(S)G2(S)_T(S)G3(S)H(S)[R(s)-T(s)]G(s)G(s)=C(s)(1)12[(R(s)-T(s))G(s)+G(s)T(s)]H(s)+C(s)=T(s)(2)13G)s(G(s)[1+G)s(H(s)]123C(s)R(s)=1+G)s(G(s)+G(s)H(s)+G)s(H(s)12132.13求图题2.13所示系统结构图的传递函数C(s/)R(s)和C(s/)N(s)。N(s)G(s)3R(s)C(s)ÄG1(s)ÄG2(s)Ä--G(s)4G5(s)ÄH(s)图题2.13解:求C(s/)R(s)时,令N(s)=0,系统结构图变为7
王万良编著《自动控制原理》(高等教育出版社)习题解答T2(S)R(s)C(s)G1(S)G2(S)_T1(S)G4(S)G3(S)H(S)C(s)G5(s)=(1)T1-G(s)G(s)145C(s)G2(s)=(2)T2G2(s)G5(s)1+1-G(s)G(s)45G(s)G(s)12G(s)G(s)251+C(s)1-G4(s)G5(s)=R(s)G1(s)G2(s)H(s)1+G(s)G(s)251+1-G(s)G(s)45C(s)G1G21(-G5G4)=(3)R(s)1(-GG)(1+GGH)+GG541225求C(s/)N(s)时,另R(s)=0,如下图G3(S)C(s)N(S)G2(S)_T3(S)G4(S)G5(S)H(S)G1(S)由图列出方程:[T(s)G(s)+C(s)]G(s)+H(s)G(s)=T(4)34513[N(s)-T]G(s)+N(s)G(s)=C(s)(5)323G(s)-H(s)G(s)51由(4)得T=C(s)(6)31-G(s)G(s)45将(6)代入(5)得C(s)(G2+G3)(1-G5G4)=N(s)1(-GG)+GGH1(-GG)+GG541254258
王万良编著《自动控制原理》(高等教育出版社)习题解答2.14已知系统结构图图题2.14所示,求传递函数C(s/)R(s)及E(s/)R(s)。Gs)(Gs)(12Cs)(Rs)(Es)(ÄÄ---ÄG3s)(G4s)(Ä图题2.14解:由系统结构图列出传递函数方程E)s(G(s)G(s)+[E(s)-E(s)G(s)G(s)]G(s)G(s)-E(s)=C(s)(1)121234E(s)=R(s)-C(s)(2)将(2)代入(1)得:[G(s)G(s)-1][1-G(s)G(s)]1234C(s/)R(s)=(3)G(s)G(s)+G(s)G(s)-G(s)G(s)G(s)G(s)12341234由(2)得C(s)=R(s)-E(s)(4)将(4)代入(1)可得:1E(s/)R(s)=G(s)G(s)+G(s)G(s)-G(s)G(s)G(s)G(s)123412342.15控制系统的结构图如图题2.15所示,求传递函数C(s/)R(s)。+KÄ11+Ts1+sR(s)+ÄC(s)+-Ä+-K2Ä1+Ts2s+图题2.15解:如图中所标,设了两个中间变量P)s(、P)s(12+K1+T1S1+SP1(S)+R(s)C(s)_+_+P2(S)K1+TS22+S列出如下方程:9
王万良编著《自动控制原理》(高等教育出版社)习题解答P)s(+P)s(=C)s((1)12K1[P)s(+E(s)](1+Ts)=P)s((2)211sK2[-P)s(+E(s)](1+Ts)=P)s((3)122s由(2)得:KK121[-1(+Ts)](1+Ts)12ssP)s(=E(s)(4)2KK121+1(+Ts)(1+Ts)122s由(4)代入(2)得:KK12[(1+Ts)][(1+Ts)+]112ssP)s(=E(s)(5)1KK121+1(+Ts)(1+Ts)122s由(1)得:KK121(+Ts)+1(+Ts)12ssC(s)=P(s)+P(s)=E(s)(6)12KK121+1(+Ts)(1+Ts)122s把E(s)=R(s)-C(s)代入(6)可得:C(s)s[(K1T1+K2T2)s+K1+K2]=2R(s)1(+KT+KT+KTKT)s+[K+K+KK(T+T)]s+KK11221122121212122.16系统的信号流图如图题2.16所示,求传递函数C(s/)R(s)。G6G1G2G3G4G5ooooooRC-H1-H2-H3(a)G8G71G1G2G3G4G5G61oooooooooRC-H2-H-H13-H4-H5(b)图题2.16解:图(a)中有3个闭合回路:L=-GH,L=-GH,L=-GH;没有互不接触的121232343回路,所以,有D=1-(L+L+L)=1+GH+GH+GH123213243从输入节点R到C,有2条前向通道,前向通道传递函数10
王万良编著《自动控制原理》(高等教育出版社)习题解答P=GGGGG,P=GGG,由于P1与所有闭环回路接触,所以D=1,P2与L2不11234521561接触,所以D=1+GH232代入梅森公式得图(a)的传递函数为C(s)GGGGG+GGG1(+GH)1234515632=R(s)1+GH+GH+GH+GHHH+GHGH21324361232143图(b)中有5个闭合回路:L=-GH,L=-GH,L=-GH,L=-GGGH,12124236343454L=-GGGGGGH;有互不接触的回路LLLL与L,L与L,L与L,三三互不51234565123122313接触回路,所以,有D=1+GH+GH+GH+GGGH+GGGGGGH+GGGGGH+21426334541234565734565GGGH-GHGGH-GHH+GHGH+GHGH+GHGH+186571865841214221634263GHGGGH-GHGHGGH-GHGHH+GHGHGH421865427186542841214263从输入节点R到C,有2条前向通道,前向通道传递函数P=GGGGGG,P=GGGGG,P=GGG,P=-GHGG由于P1、P2与所有1123456273456318647186闭环回路接触,所以D=D=1,D=1+GH,D=1+GH12342442代入梅森公式得图(b)的传递函数为C(s)G1G2G3G4G5G6+G3G4G5G6G7+G1G8G61(+G4H2)-G7H1G8G61(+G4H2)=R(s)1+GH+GH+GH+GGGH+GGGGGGH+GGGGGH+21426334541234565734565GGGH-GHGGH-GHH+GHGH+GHGH+GHGH+186571865841214221634263GHGGGH-GHGHGGH-GHGHH+GHGHGH4218654271865428412142632.17系统的信号流图如图题2.17所示,求输出C(s)的表达式。H3R(s)C(s)111Goo1ooG3G4H1H2R(s)21ooG2oH4图题2.17解:令R2)s(=0时图中有6个闭合回路:L1=G1H3,L2=G2H4,L3=G3H2,L4=G4H1,L5=G3G4H3H4,L6G1G2H1H2;有互不接触的回路L1与L2,L3与L4,所以,有D=1-GH-GH-GH-GH-GGHH-GGHH+GGHH+GHGH13243241343412121234324从输入节点R到C,有2条前向通道,前向通道传递函数P=G,P=GGH,由于P1、112344P2与所有闭环回路接触,所以D1=1,D2=1-G2H4,代入梅森公式和传递函数可得:[G1(-GH)+GGH]R(s)1243441C(s)=同11-GH-GH-GH-GH-GGHH-GGHH+GGHH+GHGH132432413434121212343241理可得:[G1(-GH)+GHG]R(s)4322212C(s)=21-GH-GH-GH-GH-GGHH-GGHH+GGHH+GHGH132432413434121212343241[G1(-GH)+GGH]R(s)+[G1(-GH)+GHG]R(s)12434414322212C(s)=1-GH-GH-GH-GH-GGHH-GGHH+GGHH+GHGH13243241343412121234324111
王万良编著《自动控制原理》(高等教育出版社)习题解答第3章习题解答3.1已知系统特征方程如下,试用劳斯判据判别系统稳定性,并指出位于右半S平面和虚轴上的特征根的数目。5432(1)Ds()=s+s+4s+4s+2s+=1065432(2)Ds()=s+3s+5s+9s+8s+6s+4=05432(3)D(s)=s+3s+12s+20s+35s+25=065432(4)D(s)=s+s-2s-3s-7s-4s-4=0解:(1)劳斯表结构如下:5s1424s1413se124e-1s1e21es1-4e-10s14e-1因为e是一个很小的正数,〈0,因此劳斯表第一列符号变化2次,所以系统不稳定,e有两个特征根在右半S平面。(2)劳斯表结构如下6s15845s396442s264®Fs()=2s+6s+433s46¬Fs"()=4s+6s2s3413s20s4求解F(s)=0可得s=±2,j±j4个虚跟,说明系统有4个根在虚轴上,临界稳定(3)劳斯表结构如下:6s112355s3202541680s3332s525®Fs()=s+52s2¬F"()s=2s1s25求F(s)=0可得s=±5j,系统有两个跟在虚轴上,临界稳定12
王万良编著《自动控制原理》(高等教育出版社)习题解答(4)劳斯表结构如下6s1-2-7-45s1-3-4442s1-3-4®Fs()=s-3s-43"3s4-6¬Fs()=4s-6s2s-3/2-41s-50/30s-4利用劳斯判据可得:劳斯表第一列数符号改变1次,又辅助方程有一正实根,所以系统有两个根在右半平面,两个跟在虚轴上,系统不稳定。3.2已知单位反馈系统的开环传递函数为s+2G(s)=232s(s+2s+9s+10)试用劳思判据判别系统稳定性。若系统不稳定,指出位于右半S平面和虚轴上的特征根的数目。5432解:闭环特征方程为:s+2s+9s+10s+s+2=05s1914s21023s4002s1021s-5/400s2第一列数的符号变化两次,所以有两特征根在右半S平面,系统不稳定。3.3已知单位负反馈控制系统的开环传递函数为2wKG(s)=nv22s(s+2zws+w)nn-1当w=90秒,阻尼比z=2.0时,试确定K为何值时系统是稳定的。nv解:由开环传递函数可得特征方程为32222D)s(=s+2zws+ws+Kw=0v劳斯表如下:32s1wn22s2zwKwnvn212zwn-Kvwns2z02sKwvn22由劳斯判据,系统稳定的充分必要条件为2zw-Kw>0,Kw>0,解上面的不等式,nvnvn-1保证系统稳定的K的取值范围为00,K>0解得0,0T>02s(Ts+)1确定当闭环系统稳定时,T,K应满足的条件。32解:由开环传递函数可得特征方程为:D(s)=Ts+(2K+1)s+3Ks+K=0劳斯表如下:3sT3K2s2K+1K12s6K+3KTK-0sK2由劳斯判据,系统稳定的充分必要条件为6K+3KTK->0,解上面的不等式,当00;当T³3时,K>。63.6已知反馈控制系统的传递函数为10G(s)=,H(s)=1+Khss(s-)1试确定使闭环系统稳定时K的取值范围。h解:开环特征方程为:1010(1+Ks)GsHs()()=(1+Ks)=hhss(-1)ss(-1)闭环特征方程为:ss(-1)10(1++Ks)=0h2即s+(10K-1)s+10=0h2s1101s10K-1h0s10当10K->10,即K>0.1稳定,当K=0.1时,临界稳定。这是非最小相位系统,K越hhhh大,系统越稳定。14
王万良编著《自动控制原理》(高等教育出版社)习题解答-60t-10t3.7已知系统的单位阶跃响应为c(t)=1+2.0e-2.1e,试求:(1)系统的传递函数;(2)系统的阻尼比V和自然振荡频率w。n-60t-10t解:(1)对单位阶跃响应为c(t)=1+2.0e-2.1e取L变换得12.02.16001C(s)=+-=ss+60s+10(s+60)(s+10)s600系统的传递函数为:F()s=(s+60)(s+10)22(2)由典型二阶系统得特征方程:D(s)=s+2zws+w=0nn2题中D(s)=s+70s+600=02比较可得2Vwn=70,wn=600,可解得:V=.143wn=245.3.8在零初始条件下,控制系统在输入信号r(t)=(1t)+t(1t)的作用下的输出响应为c(t)=t(1t),求系统的传递函数,并确定系统的调节时间ts。111解:将r(t)=(1t)+t(1t)与c(t)=t(1t)进行L变换得R)s(=+,C(s)=22sssC(s)1所以系统的传递函数为=R(s)s+1T=1,3D=5ts=,4D=23.9设单位反馈系统的开环传递函数为1G(s)=s(s+)1试求:系统的上升时间t、超调时间t、超调量s%和调节时间t。rpps解:w=(1rad/s),V=1=5.0,w=w1-z2=.0866(rad/s)ndn2wn-1p-Jp-cos5.0t===.242srw.0866dpt==3.628spwdzp-21-zs%=e´100%=163.%p3=,6D=5zwnts=4=,8D=2zwn15
王万良编著《自动控制原理》(高等教育出版社)习题解答3.10要求图题3.10所示系统具有性能指标:s%10%=,t=0.5s。确定系统参数K和A,pp并计算tr,ts。R(s)KC(s)s(s+)1As图题3.10KC(s)s(s+)1K解:系统的闭环传递函数为==R(s)1+K1(+As)s2+1(+AK)s+Ks(s+)1可见,系统为典型二阶系统:wn2=K,2Vw=1+KAn2--pV/1-V2由s%=e´100%=10%,得:pV/1-V=ln10=.2302585,V=.0439np2p由t==5.0,得w==.778pn22w1-V1-Vn22Vwn-1则K=w=605.,A==.0135;nKt=.029;t=.088(D=)5;t=.117(D=)2rss3.11图题3.11所示控制系统,为使闭环极点为s=-±1j,试确定K和a的值,并确定这1,2时系统的超调量。r(t)c(t)K2s1+as图题3.112K/sKK解f(s)===2221+K/s1(+as)s+K1(+as)s+Kas+K22-Ka±Ka-4Ks=2,1222要使s=-±1j,则可知Ka-4K<0,即1,222-Ka±j4K-Kas=1,22Ka=2224K-Ka=4K=2,a=1wn2=K=2,2Vw=Ka=2nV=.0707,s%=3.4%p16
王万良编著《自动控制原理》(高等教育出版社)习题解答3.12设典型二阶线性定常系统的单位阶跃响应曲线如图3.12所示(1)求阻尼比V和自然振荡频率wn;(2)画出等效的单位反馈系统;(3)写出系统的开环传递函数和闭环传递函数。C(t)1.251t(秒)00.3图题3.12-zp2p1-z解(1)t==0.3,s%=e´100%=25%ppwdz=0.4,w=11.4n(2)r(t)129.96c(t)-s(s+9.12)129.96129.96(3)G(s)=,F(s)=2s(s+9.12)s+9.12s+129.963.13单位负反馈控制系统的开环传递函数为100Gs()=SS(+10)试求:⑴位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka;2⑵当参考输入r(t)=1+t+at时,系统的稳态误差。100解(1)K=limG(s)H(s)=lim=¥ps®0s®0s(s+10)K=limsG(s)H(s)=lim100=10vs®0s®0s+10K=lims2G(s)H(s)=lim100s=0as®0s®0s+10R(2)r(t)=1时,e==01ss1+KpRr(t)=t时,e==0.12ssKv2Rr(t)=t时,e==¥3ssKae(¥)=¥ss17
王万良编著《自动控制原理》(高等教育出版社)习题解答3.14单位负反馈系统的开环传递函数为5G(s)=s(s+)1(1)求输入信号为r(t)=1.0t时系统的稳态误差;12(2)求输入信号为r(t)=.001t时系统的稳态误差。25解(1)K=limsG(s)H(s)=lim=5vs®0s®0(s+)1Re==0.02ssKv25s(2)K=limsG(s)H(s)=lim=0as®0s®0s+1Re==¥ssKa3.15单位负反馈系统的开环传递函数为KG(s)=(s+2)(s+)5求在单位阶跃信号的作用下,稳态误差终值e=1.0时的K值。ssK解K=limG(s)H(s)=lim=0.1Kps®0s®0(s+2)(s+)5R1e===0.1ss1+K1+0.1KpK=903.16控制系统的结构如图题3.16所示:图题3.16(1)当K=8,a=0时,确定系统的阻尼系数V,无阻尼自然振荡频率w以及单位斜坡n函数输入时系统的稳态误差;(2)当K=8时,确定使系统为最佳二阶系统(x=.0707)时反馈校正参数a的值,并计算单位斜坡输入时的稳态误差。(3)在保证x=0.707和单位斜坡输入时的稳态误差e=0.25的条件下,确定参数a及前ss向通道增益K。/8s(s+)288解f(s)===21+/8s(s+)2s(s+)2+8s+2s+82w=8,2zw=2nnw=22,z=2,K=4,e()¥=1=0.25nvss4418
王万良编著《自动控制原理》(高等教育出版社)习题解答(2)G(s)=8s(s+)2+8as88f(s)==2s(s+)2+8as+8s+2(+8a)s+82+8a=2zwnw=8na=0.25K8s=limsG(s)H(s)=lim=2vs®0s®0s2+2(+8a)sRe==0.5ssKvK(3)G(s)=ss(+2)+aKse=R=0.25ssKvK=4vK=limsG(s)H(s)=limKs=4vs®0s®0s2+2(+Ka)sK=42+Ka2+Ka=2zwn2w=KnK=32,a=0.1873.17如图题3.17所示系统,采用微分补偿复合控制。当输入r(t)=t时,要求系统稳态误差的终值为0,试确定参数td的值。tdsR(s)E(s)KC(s)s1(+Ts)图题3.17K解G(s)=1,G(s)=,H(s)=1,Gc(s)=t(s)12ds1(+Ts)Ktds1-G2(s)Gc(s)H(s)1-s1(+Ts)1E(s)=R(s)=K21+G(s)G(s)H(s)s1c1+s1(+s)e(¥)=limsE(s)=1+ts-Ktd=1-Ktd=0sss®0s1(+Ts)+KK1t=dK19
王万良编著《自动控制原理》(高等教育出版社)习题解答3.18控制系统结构图如图题3.18所示:(1)计算测速反馈校正(t=0,t=0.1)时,系统的动态性能指标s%,t以及单位12s斜坡输入作用下的稳态误差e;ss(2)计算比例-微分校正(t=0.1,t=0)时,系统的动态性能指标s%,t以及单位12s斜坡输入作用下的稳态误差e。ssts1R(s)C(s)E(s)10ÄÄÄs(s+)1--ts2图题3.181010解(1)G(s)=,f(s)=2s(s+)2s+2s+1010sRK=limsG(s)H(s)=lim=5,e==0.2vsss®0s®0s(s+)2Kv-zP2w=10,z=10,s%=e1-z=35.1%,t=5.3=3.5nps10zwn101.0(s+)1s+10(2)G(s)=f(s)=2s(s+)1s++s10K=limsG(s)=10vs®0e=R=0.1ssKv-zP21-zs%=e=35.1%,p3.19控制系统结构图如图题3.19所示:(1)当K=25,Kf=0时,求系统的阻尼比V,无阻尼自然振荡角频率wn以及单位斜坡输入作用下的稳态误差;(2)当K=25时,求K取何值能使闭环系统的阻尼比V=.0707,并求单位斜坡输入f作用下的稳态误差e;ss(3)欲使V=0.707,单位斜坡输入作用时的稳态误差e=0.12,求K和K。ssfR(s)E(s)11C(sÄKÄs+3s--Kf图题3.1920
王万良编著《自动控制原理》(高等教育出版社)习题解答2525解(1)G(s)=,f(s)=,w=5,z=0.32ns(s+)3s+3s+25K=limsG(s)H(s)=limsG(s)=lim25s=25vs®0s®0s®0s(s+)33R3e==ssK25v2525(2)G(s)=,f(s)=2s(s+3+Kf)s+3(+Kf)s+25w=5,2zw=3+K,K=4nnff25s25K=limsG(s)H(s)=limsG(s)=lim=vs®0s®0s®0s(s+3+K)7fRe==0.28ssKv(3)G(s)=2K,f(s)=K2s(s+3+K)s+3(+K)s+KffK=limsG(s)H(s)=limsG(s)=limk=kvs®0s®0s®0s+3+K3+KffR3+Kf3e===(1)ssKK25v2w=K,2zw=3+K(2)nnf由(1),(2)式得3K=75+25KfK=138.84,K=13.663f.1414K=3+K253.20已知系统结构图如图题3.20所示,其超调量sp%=163.%,峰值时间tp=1s。试求:(1)开环传递函数G(s);(2)闭环传递函数F(s);(3)根据已知性能指标sp%及tp确定参数K及t;(4)计算输入r(t)=5.1t时系统的稳态误差。R(s)E(s)10C(s)ÄKÄs(s+)1-ts图题3.2010K×解(1)s(s+)110KG(s)==10tss(s+1+10t)1+s(s+)1(2)G(s)10KF(s)==21+G(s)s+1(+10t)s+10K21
王万良编著《自动控制原理》(高等教育出版社)习题解答2-xp/1-xs%=e=163.%x=5.0(3)令p解出:tp==1w=.36282n1-xwn又因210K=w=13.16n1+10t=2xw=.3628n故K=.1316t=.02627(4)由(1)得10K开环增益K==.362801+10t系统型别v=I故当r(t)=Rt=5.1t时,利用静态误差系数法得R5.1e===.04135ssK.362803.21复合控制系统结构图如图题3.21所示,图中K,K,T,T是大于零的常数。1212(1)确定当闭环系统稳定时,参数K,K,T,T应满足的条件。1212(2)当输入r(t)=Vt时,选择校正装置G(s),使得系统无稳态误差。0cG(s)cR(s)E(s)KKC(s)12ÄÄTs+1s(Ts+)1-12图题3.21解(1)系统的闭环传递函数KK12+KGTs2c(1+1)F()s=sTs(+1)(Ts+1)+KK1212系统误差传递函数s(Ts+1)(Ts+)1-KG(s)(Ts+)1122C1F(s)=es(Ts+1)(Ts+)1+KK121232D(s)=s(Ts+1)(Ts+)1+KK=TTs+(T+T)s+s+KK1212121212劳斯判据表:3sTT1122sT+TKK1212T+T-TTKK1121212sT+T120sKK12因K,K,T,T均大于零,所以只要T+T>TTKK即可满足稳定条件1212121212(2)s(Ts+1)(Ts+)1-KG(s)(Ts+)1VVG(s)122C100Ce=limsF(s)R(s)=lims××=lim1[-K]sse22s->0s->0s(T1s+1)(T2s+)1+K1K2ss->0K1K2s令e=0故sssG(s)=CK222
王万良编著《自动控制原理》(高等教育出版社)习题解答3.22某系统结构图如图题3.22所示,其中R(s)为给定输入量,N(s)为扰动输入量。(1)该系统在阶跃扰动输入信号n(t)=(1t)的作用下所引起的稳态误差e;ssn(2)使系统在r(t)=n(t)=t同时作用下的稳态误差e=0,试确定K的取值。ssdN(s)KnTs+1nKsdR(s)E(s)C(s)K1ÄÄÄs(Ts+)11-图题3.22解(1)f=Kn-1=-Kns(T1s+)1en2Tns+1K1(Tns+1)(T1s+s+K1)1+s(Ts+)11-Ks(Ts+)11e=limsfN(s)=limsn1=0ssen2s®0s®0(Ts+1)(Ts+s+K)sn11K11-Ksds(Ts+)1s(Ts+)1-KsK11d1(2)f(s)==e1+K1s(T1s+)1+K1s(Ts+)11-Kns(T1s+)11e=limsfN(s)+limsf(s)R(s)=lims+ssene22s®0s®0s®0(Ts+1)(Ts+s+K)sn11s(T1s+)1-KdsK11-K+1-KdK1=0,1-Knlims=nKd=s®0s(Ts+)1+Ks2K11K1K113.23已知系统结构图如图题3.23所示,试求:(1)传递函数C(s/)N(s)(无虚线所画的前馈控制);(2)设N(s)阶跃变化D值(D为设定值),求C(s)的稳态变化;(3)若加一增益等于K的前馈控制,如图中虚线所示,求C(s/)N(s),并求N(s)对C(s)稳态值影响最小的K值。KNs)(-Rs)(2Cs)(1Ä10Äs+5s+1-图题3.23C(s)1s+5解(1)==s+12N(s)21s+6s+251+10s+5s+123
王万良编著《自动控制原理》(高等教育出版社)习题解答s+5DD(2)C(¥)=lims=s®0s2+6s+25s5112C(s)-10Ks+5-20K(3)=s+1s+1s+5=N(s)2120s+6s+251-s+1s+5s+-520kDc()¥=limsf()sNs()=lims2s®0s®0s+6s+2551当K=时,c(¥)最小,值为043.24如图题3.24所示控制系统,其中e(t)为误差信号。n(t)c(t)r(t)e(t)1K0K(1+)PsTs(+1)TsI图题3.24(1)求rt()=t,nt()=0时,系统的稳态误差e;ss(2)求rt()=0,nt()=t时,系统的稳态误差e;ss(3)求rt()=t,nt()=t时,系统的稳态误差e;ss(4)系统参数K0,T,KP,TI变化时,上述结果有何变化?1s(Ts+)1解(1)f(s)==e1K011+K1(+)s(Ts+)1+KK1(+)PP0T1ss(Ts+)1T1sK0-f=s(Ts+)1=-K0en1K11+K1(+)0s(Ts+)1+KK1(+)PP0T1ss(Ts+)1T1sE(s)=f(s)R(s)+fN(s)een1e=limsf(s)R(s)=limss(Ts+)1=0sse2s®0s®01ss(Ts+)1+KK1(+)P0Ts11-T(2)e=limsfN(s)=lims-K=1ssen02s®0s®01sKPs(Ts+)1+KK1(+)P0Ts1-T1(3)e=limsfN(s)+limsf(s)R(s)=ssenes®0s®0KP(4)当K,T发生变化时,对上述结果无任何影响。因为K,T处于外扰n(t)作用点的后面对00e(¥)无影响。而系统为二阶无差度系统,r(t)=t时e(¥)=0故K,T等数变化,只要不ssss0改变系统的结构,即e(¥)=0,当K,T发生变化时,对e(¥)有影响。ssPIss24
王万良编著《自动控制原理》(高等教育出版社)习题解答3.25如图题3.25所示系统。N(s)R(s)E(s)K2C(s)K1sTs(+1)2图题3.25(1)求r(t)=,0n(t)=(1t)时,系统的稳态误差e;ss(2)求r(t)=t,n(t)=(1t)时,系统的稳态误差e;ss(3)若要减少e,则应如何调整K,K?ss12(4)如分别在扰动点之前或之后加入积分环节,对e有何影响?ss1s(Ts+)12解f(s)==eKs(Ts+)1+kK22121+k1s(Ts+)12K2-s(Ts+)1-K22f==enKs(Ts+)1+kK22121+k1s(Ts+)12E(s)=f(s)R(s)+fN(s)een-K211(1)e=limsfN(s)=lims=-ssens®0s®0s(T2s+)1+k1K2sK1(2)e=limsfN(s)+limsf(s)R(s)ssenes®0s®0-K21s(T2s+)1111=lims+lims=-2s®0s(T2s+)1+k1K2ss®0s(T2s+)1+k1K2sKK12K1(3)增加K可同时减少由r(t),n(t)输入所产生的稳态误差,而增加K只对减少有由r(t)输入12所产生的稳态误差有效(4)在扰动点之前的前向通道中加入积分环节,有利于提高系统的稳态指标(无论对控制输入还是扰动);在扰动后的前向通道加积分环节,对减少扰动作用下的稳态误差无效。3.26求如图题3.26所示系统在r(t)和n(t)同时作用下的稳态误差e(误差定义为e=-rc)。sssn(t)=0.1sin100tr(t)=1+t11c(t)ss+1图题3.2625
王万良编著《自动控制原理》(高等教育出版社)习题解答11解:(R-NsC-)+N+R=Css+1s+1C=Rss(+1)1+2sE=RC-=Rss(+1)+13s11ess=limsEs()=+2=0s®0ss(+1)+1ss3.27如图题3.27所示系统n(t)n(t)12r(t)c(t)1Ks图题3.27其中,输入r(t)和扰动n(t)、n(t)都是单位阶跃函数。求12(1)在r(t)作用下的稳态误差e;ss(2)在n(t)作用下的稳态误差e;1ss(3)在n(t)作用下的稳态误差e;2ss(4)在输入r(t)和扰动n(t),n(t)同时作用下的稳态误差e。12ss解:1[KE(s)+N(s)]+N(s)=R(s)-E(s)12ss1sE(s)=R(s)-N(s)-N(s)12s+Ks+Ks+Ks1)1(e(¥)=lims=0ssrs®0s+Ks-111)2(e(¥)=lims=-ssn1s®0s+KsK-s1)3(e(¥)=lims=0ssn2s®0s+Ks1(4)e(¥)=e(¥)+e(¥)+e(¥)=-ssssrssn1ssn2K2as+bs3.28复合控制系统的方框图如图题3.28所示,前馈环节的传递函数Fs()=。当输入rTs+11r(t)为单位加速度信号时,为使系统的稳态误差为零,确定前馈环节的参数a和b。F(s)rR(s)E(s)KC(s)2ÄK1Äs(Ts+)1-2图题3.2826
王万良编著《自动控制原理》(高等教育出版社)习题解答解:系统的误差传递函数为2[sTTs+(T+T-Ka)s+1(-Kb)]121222F(s)=e(Ts+1)[s(Ts+)1+KK]211221s[TTs+(T+T-Ka)s+1(-Kb)]121222e=limsF(s)R(s)=lims×sse3s®0s®0s(Ts+1)[s(Ts+)1+KK]211211-Kb2=lim[TTs+(T+T-Ka)+]12122s®0KKs12T1+T2-K2a=0T1+T21可见当时才满足要求。由此得出a=b=1-Kb=0KK22227
王万良编著《自动控制原理》(高等教育出版社)习题解答第4章习题解答4.1已知系统的开环传递函数为kGsHs()()=ss(+1)(s+2)(1)试绘制k³0时系统的根轨迹;(2)确定k=1时系统的闭环极点;V=0.5(3)确定时系统的闭环极点和对应的k。解:(1)1)开环极点:P=0,P=-1,P=-2;1232)根轨迹有3条分支,分别起始于极点P=0,P=-1,P=-2,终止于无穷零点。1233)实轴上的根轨迹位于(-¥-,2]、[-1,0]区段;4)根轨迹有3条渐近线nm∑pi-∑zji=1j=1012--s===-1anm-3oooo(2k+1)p(2k+1)18060,180,300q===n-m3k=0,1,25)根轨迹的分离点系统的特征方程为:1+1+1=0dd+1d+2解之得:d=-.042,d=-.158(舍去)126)与虚轴的交点。将s=jw代入系统闭环特征方程,令其实部、虚部都为零,可得:32w-w=02k-w=0解得w=.1414,K=2由此得系统的根轨迹如下图所示:28
王万良编著《自动控制原理》(高等教育出版社)习题解答Ds()=ss(+1)(s+2)10+=(2)k=1时,系统的闭环特征方程为解得闭环极点为:s=-2.3247、s=-0.337650.56311+j、s=-0.337650.56311-j1232(3)当V=0.5时,设闭环主导极点为s=-zw±jw1-z=-0.5w±jw0.75由根之和法1,2nnnn则得:p+p+p=s+s+s,即s=w-3。由s,s,s,可得系统的闭环特征方程1231233n123为:3222Ds()=(ss-)(ss-)(ss-)=s+(w-ss)+(w-sw)ss-w123n3n3n3n又有题目可得系统的闭环特征方程为:32D(s)=(s-s)(s-s)(s-s)=s+3s+2s+K123222比较上述两个式子可得:w=»0.667,s=w-=-32.333,k=-sw=2.333.667´=1.038n3n3n3V=0.5即使复数闭环主导极点的阻尼系数时k=1.038。4.2已知系统的开环传递函数为ks(+1)GsHs()()=2ss(-1)(s+4s+16)(1)试绘制k³0时系统的根轨迹;(2)试绘制k£0时系统的根轨迹。解:(1)k³0时-+223j--223j开环极点:0、1、、;开环零点:-11)根轨迹分支数4(-¥-,1][0,1]2)实轴上的根轨迹位于、3)渐近线条数31(2+-+23)j+--(223)j--(1)2s==-渐近线:41-3oooo(2k+1)p(2k+1)18060,180,300q===n-m3k=0,1,24)根轨迹分离点根据A¢B=AB¢可得d1=-.22627,d2=.04483,d3=-.07595+j.21637(舍),d4=-.07595-j.21637(舍)w2,1=±.15616w4,3=±.256165)根轨迹与虚轴的交点,k=23.3148k=35.68546)出射角因为p1=-2+23j,p2=-2-23j,p3=0,p4=1,z=-1=180o+---=180o+106o-90o-120o-131o=-55oqpjzpqppqppqpp11213141=55oqp2根轨迹如图:29
王万良编著《自动控制原理》(高等教育出版社)习题解答o(2)(1)k£0时,系统的根轨迹为0根轨迹-+223j--223j1)开环极点:0、1、、;开环零点:-12)根轨迹分支数43)实轴上的根轨迹位于[-1,0]和[1,¥]3)渐近线条数31(2+-+23)j+--(223)j--(1)2s==-渐近线:41-3oooo2kp2k´1800,120,240q===n-m3k=0,1,2根轨迹如图:30
王万良编著《自动控制原理》(高等教育出版社)习题解答4.3已知系统的开环传递函数为kGsHs()()=2ss(+10)(1)试绘制k³0时系统的根轨迹;(2)试绘制k£0时系统的根轨迹。解:(1)k³0时,kGsHs()()=2s(s+10)1)根轨迹起始于-10,0,0;终止于三个零点(无限零点)2)根轨迹分支数为33)实轴上的根轨迹位于(-¥-,10]区段;4)渐近线为3条-10s=oooo3,(2k+1)p(2k+1)18060,180,300q===n-m3k=0,1,2根轨迹图:o(2)k£0时,系统的根轨迹为0根轨迹1)根轨迹起始于-10,0,0;终止于三个零点(无限零点)2)根轨迹分支数为33)实轴上的根轨迹位于[10,]-¥区段;4)渐近线为3条oooo-102lp2l´1800,120,240s=,q===3n-m3l=0,1,25)分离点根据A¢B=AB¢20可得d1=-,d2=0(舍)331
王万良编著《自动控制原理》(高等教育出版社)习题解答4.4已知系统的开环传递函数为1GsHs()()=ss(+1)(Ts+1)试绘制T³0时系统的根轨迹。解:由1+GsHs()()=0ss(+1)(Ts+1)1+=02Ts(s+1)1+=02s+s+12""Ts(s+1)等效开环传递函数为GsHs()()=2s++s12s(s+1)1根轨迹的起点与终点:由于此时零点数大于极点数,由=-可得:2s++s1T当T=0时,一条根轨迹起源于-¥远处,当T®+¥时,根轨迹终止于零点。根轨迹渐近线与实轴的交点s:a2s++s11考虑到=-T=-2s(s+1)KT®0与K®+¥对应,因此33---1(0.5+j)--(0.5-j)s=22=03-2根轨迹渐近线与实轴正方向的夹角为±p。3出射角:等效开环传递函数的极点为p1,2=-0.5±j,p1到等效开环传递函数的零点233z=0、z=-1的相角分别为q=tan2=120o,2o1211q2=tan=60-122oooooo出射角qp=-180+´2120+60-90=30,qp=-301232
王万良编著《自动控制原理》(高等教育出版社)习题解答根轨迹如下图所示:33
王万良编著《自动控制原理》(高等教育出版社)习题解答第5章习题解答5.1求图题5.1所示RC电路的传递函数和频率特性。R1URi2UoC1C2图题5.12Cs()RRCCS+(RC+RCs)+1解:传递函数:=121211222Rs()RRCCS+(RC+RC+RCS)+11212112212频率特性:把上式的s改为jw5.2图题5.2所示控制系统,根据频率特性物理意义,求下列输入信号作用时系统的稳态输出c和稳态误差e;ssss(1)r(t)=sin2t;00(2)r(t)=sin(t+30)-2cos(2t-45)。R(s)E(s)C(s)1Äs+1-图题5.21o101解:(1)c=sin(2t-45)e=sin(2t+arctg)ssss2243(2)c=1sin(t-30o-arctg1)+2sin2t;e=2sin(t+48)4.+5sin(2t+63)4.ssss522585.3最小相位系统的开环对数幅频渐近线如图题5.3所示,确定系统的开环传递函数。L(w)0dB/dec400dB/dec-20dB/dec3020dB/dec20-40dB/dec501.0w1w2w3w4w-60dB/dec图题5.3解:因为最小相位系统,即系统的闭环极点都在s左边平面转换频率:1.0、w、w、w、10012334
王万良编著《自动控制原理》(高等教育出版社)习题解答w=1.0处,斜率为20dB/dec,属于微分环节w=w处,斜率为-20dB/dec,属于惯性环节,1w=w处,斜率为-20dB/dec,属于惯性环节,2w=w处,斜率为-20dB/dec,属于惯性环节,3w=100处,斜率为-20dB/dec,属于惯性环节,因此系统的传递函数为:sK(+)11.0G(s)=ssss(+1)(+1)(+1)(+)1www1001235.120lgK=30,K=10=31.62,根据dB/dec的几何意义有:40-3020=,w1=.0316lgw-lg1.015-20-40=,w3=42.17lg100-lgw320-40-20=,w=.42172lgw-lgw32s31.62(+)11.0G(s)=ssss(+1)(+1)(+1)(+)10.3164.21742.171005.4最小相位系统的开环对数幅频特性的渐近线如图题5.4所示,试写出下列情况下系统的开环传递函数。L(w)db80-20db/dec-40db/dec-20db/dec5w0.0010.010.1-40db/dec图题5.4(1)A=80dB(2)w=1c解:1K(s+)11.0G(s)=11s(s+1)(s+)1.0015在穿越频率w=1附近,作如下近似:c35
王万良编著《自动控制原理》(高等教育出版社)习题解答12K1(+w)0.110KK»==11212100w10w1+w1+w0.01510(10s+1)得K=10,故Gs()=s(100s+1)(0.2s+1)5.5最小相位系统的开环对数幅频特性渐进线如图题5.5所示,确定系统的开环传递函数。L(w)db-40dbdec/-60db/decw810161-40db/dec-60/dbdec图题5.5解:由系统开环对数幅频特性图可知:1K(s+)18G(s)=21s(s+1)(s+)116K=10,K=100aa200(s+)8G(s)=2s(s+1)(s+16)5.6最小相位系统的开环对数幅频特性的渐近线如图题5.6所示,确定系统的开环传递函数。L(w)-20db/dec-40db/decw2.05.0图题5.6K解:G(s)=1s(s+)12由图可知,系统的截止频率为:w=5rad/sc36
王万良编著《自动控制原理》(高等教育出版社)习题解答K25=1,得K=125.,G(s)=wwc=5cs(s+)2wc25.7最小相位系统的开环对数幅频特性的渐近线如图题5.7所示,确定该系统的开环传递函数。L(w)db-20db/dec-60db/decw11000.2-20db/dec图题5.7解:由对数幅频特性的渐近线可知:12K(s+)110G(s)=12s(s+)12.0K已知:wc=1,=1,得K=25wwc=1c2w()c22251.0(s+)1G(s)=2s5(s+)15.8最小相位系统的开环对数幅频特性的渐近线如图题5.8所示,确定系统的开环传递函数。L(w)-40db/dec-20db/decw0.512-40db/dec图题5.8解:由于对数幅频特性的低频段是-40dB/dec的直线,所以系统传函有2个积分环节。易得系统传函为1K1(+s)5.0K1(+2s)G(s)==122s1(+5.0s)s1(+s)2wcK又因为穿越频率为ω=1,所以5.0=1,得K=5.02wc=1wc1(5.0+2s)即系统传递函数为G(s)=2s1(+5.0s)37
王万良编著《自动控制原理》(高等教育出版社)习题解答5.9已知单位反馈系统的开环传递函数为10G(s)=(s+1)(1.0s+)1用奈氏判据判断闭环系统的稳定性。解:由于开环传递函数在S平面原点处没有极点,且为单位反馈系统故H(s)=1,系统频率特性为:10G(jw)H(jw)=(jw+1)(1.0jw+)1limG(jw)H(jw)=10,limÐG(jw)H(jw)=0w®0+w®0+limG(jw)H(jw)=0,limÐG(jw)H(jw)=-pw®+¥w®+¥画出奈氏图可知N=N=0,N=0,又P=0,故Z=0,所以系统稳定。+-5.10已知单位反馈系统开环传递函数KG(s)=1(+1.0s)(1+5.0s)(1+s)用奈氏判据确定K为何值时,使得闭环系统稳定。解:由于开环传递函数在S平面原点处没有极点,且为单位反馈系统故H(s)=1,系统频率K特性为:H(jw)G(jw)=1(+1.0jw)(1+5.0jw)(1+jw)limG(jw)H(jw)=K,limÐG(jw)H(jw)=0w®0+w®0+3limG(jw)H(jw)=0,limÐG(jw)H(jw)=-pw®+¥w®+¥2系统稳定性与路径跟实轴负半轴的交点位置有关,将频率特性化为代数形式:KH(jw)G(jw)=1(+1.0jw)(1+5.0jw)(1+jw)23K1(-.065w)K.0(05w-6.1w)=+j2222221(+.001w)(1+.025w)(1+w)1(+.001w)(1+.025w)(1+w)-198.K即由ImH(jw)G(jw)=V(w)=0得w=±42,代入实部得U(±4)2==-.005K1.32´9´33画出奈氏图可知,当U(±4)2=-.005K>-1时,奈氏曲线不包围(-1,j0)点,即K=20时,为临界稳定,K满足020时,不稳定。画图略。5.11已知单位负反馈系统的开环传递函数为KG(s)=,用奈氏判据判断系统的稳定性。s-1解:由于开环传递函数在S平面原点处没有极点,S平面右半平面有一个极点,故P=1。且是单位反馈系统故H(s)=1,系统频率特性为:K-K-jwKH(jw)G(jw)==+22(jw-)11+w1+wlimG(jw)H(jw)=K,limÐG(jw)H(jw)=-pw®0+w®0+1limG(jw)H(jw)=0,limÐG(jw)H(jw)=-pw®+¥w®+¥2由奈氏图可知,系统稳定性取决于轨迹与实轴交点位置。令虚部为零得w=0,实轴交点为U)0(=-K,当K>1时,U)0(位于(-,1j)0的左边,即N=0,N=1,+-38
王万良编著《自动控制原理》(高等教育出版社)习题解答N=N-N=0-1=-1,此时,Z=N+P=-1+1=0,满足系统稳定要求。+-所以,当K>1时,系统稳定;K=1时,系统临街稳定;K<1时,N=0,P=1,Z=N+P=1,系统不稳定。画图略。5.12一单位负反馈系统的开环对数幅频特性渐进线如图题5.12所示。L(w)-20db/dec-40db/dec-20db/decw40.10.21-40db/dec图题5.12(1)写出系统开环传递函数和频率特性表达式;(2)判别闭环系统的稳定性;(3)如果将图中幅频特性曲线向右平移10倍频程,试讨论对系统阶跃响应的影响。解:(1)由于对数幅频特性的低频段是-20dB/dec的直线,所以系统传函有1个积分环节。易得系统传递函数为1K1(+s)2.0G(s)=11s1(+s)(1+s)1.04wcK又因为穿越频率为w=1,所以2.0,求得K=2,所以系统开环传递函数为c=1wwc=1cwc0.11(2+5s)G(s)=s1(+10s)(1+.025s)频率特性表达式为:1(2+5jw)G(jw)=jw1(+10jw)(1+.025jw)(2)解法一:开环传递函数在S平面原点处有1个极点,单位反馈系统故H(s)=1,系统频1(2+5jw)率特性为H(jw)G(jw)=jw1(+10jw)(1+.025jw)1limG(jw)H(jw)=¥,limÐGj(w)Hj(w)=-pw®0+w®0+2limG(jw)H(jw)=0,limÐGj(w)Hj(w)=-pw®+¥w®+¥画出奈氏图可知P=0,N=0,Z=N+P=0,所以系统稳定。解法二:因为中频段斜率为-20dB/dec,根据Bode定理可知系统一定稳定。(3)将幅频特性曲线向右移动10频程,系统稳定裕量不变,所以系统稳定性不变。由于系统带宽增加,所以系统响应速度加快,上升时间减少,抗干扰性能下降。39
王万良编著《自动控制原理》(高等教育出版社)习题解答5.13设单位反馈控制系统开环传递函数为as+1G(s)=2s0试确定使相位裕量g=45的a值。ajw+1-1-a解:G(jw)H(jw)==+j22(jw)ww221+awc422G(jw)H(jw)==1,即wc-awc-1=0cc2wcooo4又g=180+arctan(aw)-180=45,即得aw=1,代入得w=2,所以ccc1a==0.84。425.14如图题5.14所示具有时滞的控制系统:R(s)1-tsC(s)es(s+)1图题5.14分析时滞对系统稳定性的影响,确定保证系统稳定时所容许的最大时滞t。max解:时滞较小时系统稳定,随着时滞参数的增大,系统由稳定变为不稳定。其幅频特性为1Gj(w)=2w(w+1)解出w=.0786coooo该点的相角为ÐGj(0.786)=-90-arctan0.786=-90-38=-128o这表明保持系统稳定,允许滞后环节滞后52。即otw=0.786t=52/57.3=0.9075解得t=.115maxp或者:g=p--arctan.0786-.0786t2g=.0905-.0786t=0max解得t=.115max5.15某系统的对数频率特性实验数据如下表所示,确定系统的传递函数。w0.10.20.412410203020lgG342821135-5-20-31-34000000000ÐG-93-97-105-123-145-180-225-285-34540
王万良编著《自动控制原理》(高等教育出版社)习题解答解:由w=0.1~0.2,二倍频程DL(w)=-6dB须有一个积分环节。w=10~20,二倍频程DL(w)=-12dB须有一个惯性环节。00又当w=30时,ÐG(jw)=-345>-180,须有延迟环节所以-tsKeG(s)=s(Ts+)1-jwtKeG(jw)=jw(Twj+1)K120lgw2TwTK20lg=34由w,当w=0.1时,K=5。520lg=-342当w=30时,TwT=0.28-ts5eG(s)=故s.0(28s+)10ÐG(jw)=-wt´573.-90-arctg(Tw)0当w=30时,ÐG(jw)=-345,得t=1.0,故-1.0s5eG(s)=s.0(28s+)141
王万良编著《自动控制原理》(高等教育出版社)习题解答第6章习题解答6.1设单位反馈系统的开环传递函数为40G(s)=0s2.0(s+1)(.00625s+)10要求校正后系统的相位裕度g=30,幅值裕度K=10~12dB,求串联超前校正装置。g.00625s+1G(s)=c1解:原系统中频区频带窄,需使用一超前网络0.00625s+1拓宽频率。即40G(s)=1s2.0(s+1)(.000625s+)1w"=14绘制校正前系统的伯德图,可见c。00¢¢0*g¢=180-90-arctg2.0(w)-arctg.0(00625w)=14gcc.0088s+1²Gc2(s)=T=1/(wca)=.0035.252.0(035s+)140.00625s+1.0088s+1G¢(s)=××s2.0(s+1)(.00625s+)1.000625s+1.252.0(035s+)1校正后,159.´.0088w1-10=20lg*验证Hg:w1´2.0w1´.0035w1w1=252.159.´.0088w2-12=20lgw2´2.0w2´.0035w2w2=282.00f(jw)=arctg.0(088w)-90-arctg2.0(w)-arctg.0(00625w)-arctg.0(035w)=-1533.>-180G1111100f(jw)=arctg.0(088w)-90-arctg2.0(w)-arctg.0(00625w)-arctg.0(035w)=-1555.>-180G22222校正后系统满足幅值裕量的条件。6.2设开环传递函数KGs()=ss(+1)(0.01s+1)0单位斜坡输入R(t)=t,稳态误差小于.00625。若使校正后相位裕量不小于45,截止频率大于2,设计校正系统。1解:题为I型系统,对于斜坡输入有e=£.00625,K³16取K=16故开环传递函数ssK变为16G(s)=s(s+1)(.001s+)1用MATLAB求出相角裕度r=11.9995=12,bode图如下:42
王万良编著《自动控制原理》(高等教育出版社)习题解答由图可以看出,截止频率w=4满足要求。采用超前校正如下:cooooDj=g-g+e=45-(12)+7=400oo1sin+fm1sin+Df1sin40+取j=Dj=40,则a====4.6mo1sin-f1sin-Df1sin40-m-10lga=-10lg6.4=-.6628dB直线与未校正对数幅频特性曲线相交于w=8.5,取w=8.5c11T===.008aw6.4´8.5m1+aTs1+.0368sG(s)==c1+Ts1+0.08s校正后的传递函数为:161+.0368sG¢(s)=´s(s+1)(.001s+)11+.008s画出Bode图如下。从Bode图上可以看出,校正后的相角裕度r=46.5度,截止频率w=5.8c均满足要求。所以加串联超前网络后的系统的开环传递函数为:1+aTs1+.0368sG(s)==c1+Ts1+0.08s43
王万良编著《自动控制原理》(高等教育出版社)习题解答6.3单位反馈伺服系统的开环传递函数为200G(s)=s1.0(s+)10设计一个无源校正网络,使系统的相位裕量不小于45,截止频率不低于50。解:由MATLAB得开环系统bode图为:ooooDj=g-g+e=45-(13)+5=370oo1+sinjm1+sinDj1+sin37取j=Dj=37,则a====.402mo1-sinjm1-sinDj1-sin3744
王万良编著《自动控制原理》(高等教育出版社)习题解答-10lga=-10lg.402=-.604dB直线与未校正对数幅频特性曲线相交于w=63,取w=63c11T===.0008aw.402´63m1+aTs1+.00321sG(s)==c1+Ts1+0.008s校正后的传递函数为:2001+.00321sG¢(s)=´s1.0(s+)11+.0008s画出bode图如下:由图可以看出满足要求。R=(a-)1RR=3R1212本题要求设计无源校正网络,由得,若选择RC=aTRC=.003211R=10kW,则R=30kW,C=2.3mF,画图略。126.4设未校正系统开环传递函数为10G(s)=0s2.0(s+1)(5.0s+)10要求校正后系统的相位裕度g=65,幅值裕度K=6dB,求串联滞后校正装置。g解:校正前bode图如下:45
王万良编著《自动控制原理》(高等教育出版社)习题解答ooooo1作-(180--ge)=-(180-65-5)=-110线,对应的幅值为25dB,20lg=25,a1111=17.78,a=0.0562,取=´0.52=0.065,=0.003653,T=273.75则aaT8T115.38+sGs()=,校正后的传递函数为:c1273.75+s10115.38+sGs¢()=´,s(0.2s+1)(0.5s+1)1273.75+s0校正后系统的相位裕度g=62.2,幅值裕度K=21.5dB可知基本满足要求。g6.5设系统开环传递函数KG(s)=0s(s+1)(5.0s+)10要求校正后的系统开环放大倍数K=5,相位裕度不小于40,幅值裕度不小于10dB。v解:对于校正前的系统:520lgw<1w5L(w)=20lg12w2´5.0w¢o¢1¢o*解得w=9.2,g¢=90-arctg(w)-arctg(w)=-364.221w´5.0wa11w=.132oo1,F¢(jw1)=-178>-180520.4s+1满足裕量条件,所以Gs¢()=GsGs()()=´css(+1)(0.5s+1)180s+16.6设单位反馈系统的开环传递函数为8G(s)=s2(s+)1若采用滞后-超前校正装置(10s+1)(2s+)1G=c(100s+1)(2.0s+)1对系统进行串联校正,试绘制校正前后的对数幅频渐进特性,并计算系统校正前后的相角裕度。解:绘制出待校正系统,滞后-朝前校正装置和校正后系统的对数幅频渐进特性曲线,如图:""由图中L()w与w轴交点,得待校正系统的截至频率w=2rads/,算出待校正系统的相角裕c"oo"度r=180-90-arctan2w=14.04;c""""由图中L(w)与w轴交点,得校正后系统的截至频率w=0.8rads/,算出校正后系统的相c"oo""""""o角裕度r=180-90+arctan10w-arctan100w-arctan0.2w=74.5ccc47
王万良编著《自动控制原理》(高等教育出版社)习题解答第7章习题解答*7.1已知理想采样开关的采样周期为T秒,连续信号为下列函数,求采样的输出信号f(t)及*其拉氏变换F(s)。-at(1)f(t)=te-at(2)f(t)=esinwt¥¥*-kaT*-akT-kTs解:(1)f(t)=∑kTed(t-kT),F(s)=∑kTeek=0k=0¥¥*-akT*-akT-kTs(2)f(t)=∑esin(wkT)d(t-kT),F(s)=∑esin(wkT)ek=0k=07.2求下列序列的Z变换。设k<0时f(k)=0。23(1),1l,l,l,L234(2)l,l,l,l,L-12-23-3-1-12-13解:(1)F(z)=1+lz+lz+lz+L=1+lz+(lz)+(lz)+L1z==-11-lzz-l¥-n(2)z(e(t))=∑e(nT)zn=0F(z)=l+l2z-1+l3z-2+l4z-3+L-12-23-3llz=l1(+lz+lz+lz+L)==-11-lzz-l7.3设采样周期为0.5s,求函数f(t)的Z变换F(z)10£t<2.2f(t)=0t<,0t³2.2-1-2-3-4解:Fz()=1+z+z+z+z7.4用长除法、部分分式法和留数法求F(z)的反变换。10z(1)F(z)=(z-1)(z-)2-1-aTz1(-e)(2)F(z)=-1-1-aT1(-z)(1-ze)2z(3)F(z)=(z-8.0)(z-)1.0-10z10z(1)部分分式法:F(z)=+z-1z-2k所以:f(kT)=102(-)1kn-1留数法:f(nT)=∑Res[E(z)z]i=1z®zi48
王万良编著《自动控制原理》(高等教育出版社)习题解答n-1n-1没有重根时:Res[E(z)z]=lim[(z-z)E(z)z]z®ziiz®zin-1n-11d[(z-zi)E(z)z]有重根时:Res[E(z)z]=limz®ziz®zn-1(n-1)!idznn-110zF(z)z=(z-1)(z-)2有两个极点:z=1、z=2,极点处的留数为:12nn10z10(z-)1zRes[]=lim[]=-10z®1(z-1)(z-)2z®1(z-1)(z-)2nn10z10(z-)2znRes[]=lim[]=102()z®2(z-1)(z-)2z®2(z-1)(z-)2¥nn所以:f(nT)=102(-)1,f(*t)=∑102(-)1d(t-nT)n=0-1-aTz1(-e)(2)F(z)=-1-1-aT1(-z)(1-ze)解:部分分式法-1-aT-aTz1(-e)z1(-e)zzF(z)===--1-1-aT-aT-aT1(-z)(1-ze)(z-1)(z-e)z-1z-e¥-anT*-anTf(nT)=1-e,f(t)=∑1(-e)d(t-nT)n=018zz(3)部分分式法:F(z)=(-)7z-0.8z-0.11k+1k+1f(kT)=8.0(-1.0)0.7留数法:k+1k-1zzFz()=(z-0.8)(z-0.1)k+1k+1zzfkT()=(z-0.8)|+(z-0.1)|z=0.8z=0.1(z-0.8)(z-0.1)(z-0.8)(z-0.1)1k+1k+1=(0.8-0.1)0.7+¥*1k+1k+1ft()=∑(0.8-0.1)(dt-kT)0.7k=07.5用Z变换法解下列差分方程:(1)c(k+)2+3c(k+)1+2c(k)=0,c)0(=,0c)1(=1;(2)c(k+)2-3c(k+)1+2c(k)=r(k),r(k)=d(k),c)0(=c)1(=0;(3)c(k+)2+2c(k+)1+c(k)=r(k),r(k)=k(,k=2,1,0LL),c)0(=c)1(=0;(4)c(k+)3+6c(k+)2+11c(k+)1+6c(k)=0,c)0(=c)1(=1,c)2(=0。解:(1)对差分方程进行z变换,根据实数位移(超前)定理:m-1m-kZ[f(t+mT)]=z[F(z)-∑f(kT)z]k=049
王万良编著《自动控制原理》(高等教育出版社)习题解答222Z[c(k+2)]=zC(z)-zc)0(-zc)1(=zC(z)-zZ3[c(k+1)]=3zC(z)-3zc)0(=3zC(z)Z2[c(k)]=2C(z)差分方程变换为如下z代数方程:2(z+3z+)2C(z)=zzzz11C(z)==-=-2-1-2z+3z+2z+1z+21+z1+z2求z的反变换:(z+3z+2)()1Cz=kkc(k)=(-)1-(-)2(,k=1,0,.....)2(2)同理,原式等价于zcz()-3zcz()+2cz()=rz()因为rk()=d(k),所以rz()=11cz()=2z-3z+2k-1k-1z利用留数计算法进行z反变换:zcz()=,有两个单极点z=2,z=1(z-2)(z-1)k-1k-1zzk-1ckT()=(z-2|)z=2+|z=1=2-1(z-2)(z-1)(z-2)(z-1)0,k=0.1由已知c()0=c()1=�ckT()=k-12-1,k=2,3...(3)由Z变换实位移定理得:222zck(+2)=zCz()-zc(0)-zc(1)=zCz()zck(+1)=zCz()-zc()0=zCz()对差分方程两边取Z变换后有:2zCz()+2zCz()+Cz()=Rz()z式中Rz()=zrk()=,所以2(z-1)1zzCz()==2222z+2z+1(z-1)(z+1)(z-1)用反变换公式法求z反变换1zk-1ck()=zdz2Pj∫Gz+12z-12()()k-1k-1=ResCzz();z=1+ResCzz();z=-1dzkk-1k-12ResCzz();z=1=lim(z-1)=其中z®1dz(z+1)(2z-1)24kdzk(1-k)(-1)k-1=-=+2=ResCzz();z1lim(z1)z®1dz(z+1)(2z-1)24所以50
王万良编著《自动控制原理》(高等教育出版社)习题解答k1k-1k-1(-1)(1-k)ck()=∫Czz()dz=+2PjG44k-1k=1--(1),k=0,1,2...4(4)ck(+3)6(+ck+2)11(+ck+1)6()+ck=0,c)0(=c)1(=1,c)2(=03-1z-2332解:Z[c(k+3)]=z[C(z)-c)0(-c)1(z-c)2(]=zC(z)-z-z2-122Z6[c(k+2)]=6z[C(z)-c)0(-c)1(z]=6zC(z)-6z-6zZ[11c(k+1)]=11z[C(z)-c0()]=11zC(z)-11zZ6[c(k)]=6C(z)3232z+7z+17zz+7z+17zC(z)==32z+6z+11z+6(z+1)(z+2)(z+)3k-1求z的反变换,zC(z)有三个极点:一个单极点z=-1,z=-2,z=-3123kkkc(k)=(5.5-)1-(7-)2+(5.2-)3(,k=1,0.....)7.6如图所示采样控制系统:r(t)T1-e-TsKc(t)ss+1图题3.6(1)求系统开环脉冲传递函数;(2)求系统闭环脉冲传递函数;(2)写出系统的差分方程。-Ts1-eK解:(1)Gs()=ss+1-11-111Gz()=K(1-z)[Z]=K(1-z)[Z-]ss(+1)ss+1-T-1=K(1-z-1)[1-1]=K(1-e)z-1-T-1-T-11-z1-ez1-ez-T-1Cz()Gz()K(1-e)z(2)F()z===-T-T-1Rz()1+Gz()1(+K-e-Ke)z-T-T-T(3)ck()(+K-e-Ke)(ck-1)=K(1-e)(rk-1)7.7求图题7.7所示采样系统输出C(z)表达式。R(s)E(s)C(s)ÄÄG1(s)·--D(s)G2(s)G3(s)图题7.751
王万良编著《自动控制原理》(高等教育出版社)习题解答解:由系统结构图可以得到:C(z)=G(z)[E(z)-D(z)](1)1D(z)=GG(z)[E(z)-D(z)](2)21即:GG(z)21D(z)=E(z)(3)1+GG(z)21(3)代入到(1)得:GG(z)21C(z)=G(z)[E(z)-E(z)]11+GG(z)21G(z)1C(z)=E(z)(4)1+GG(z)21又E(z)=R(z)-G(z)C(z)(5)3(5)代入到(4)G(z)1C(z)=[R(z)-G(z)C(z)]31+GG(z)21G(z)G(z)G(z)1311[+]C(z)=R(z)1+GG(z)1+GG(z)2121G(z)1C(z)=R(z)1+GG(z)+G(z)G(z)21137.8如图题7.8所示采样控制系统(1)求在输入和扰动共同作用下的输出量的Z变换表达式;(2)求系统输出C(z)与输入R(z)之间的Z传递函数;K(3)设D1(z)=1,D2(z)=0,G1(s)=,G2(s)=1,Gh(s)是零阶保持器,求系统输出C(z)s+1与输入R(z)之间的Z传递函数。TTD2(z)N(s)R(s)TTC(s)D1(z)Gh(s)G1(s)G2(s)图题7.8GGGzDz()[()+Dz()]GNz()解:(1)Cz()=h1212Rz()+21+DzGGGz()()1+DzGGGz()()1h121h12GGGzDz()[()+Dz()](2)F()z=h12121+DzGGGz()()1h12-Ts-T-1K(1-e)K(1-e)z(3)当Dz1()1,=Dz2()=0时,GGGzh12()=Z[]=-T-1ss(+1)1-ez-TGGGz()k(1-e)h12F()z=代入数据得:F()z=-T-T1+GGGz()zk+(1-e)-eh1252
王万良编著《自动控制原理》(高等教育出版社)习题解答4327.9已知离散系统的特征方程为D(z)=z+2.0z+z+.036z+8.0=0判断系统的稳定性。解:朱利判据,D(1)>0,D(-1)>0(n为偶数),a=0.8b=2.003c=.00896>c=.0089602系统稳定。7.10如图题7.10所示离散系统,采样周期T=1s,Gh(s)为零阶保持器,而KG(s)=s2.0(s+)1要求:(1)K=5时,分析系统的稳定性;(2)确定使系统稳定的K值范围。R(t)e(t)C(t)Ä_Gh(s)G(s)T图题7.10-TsK(1-e)(1)GsGs()()=h2s(0.2s+1)-5-5GGz()K[(0.80.2+e)z-1.2e+0.2]闭环传递函数F()z=h=-5-5-5GGz()1+(z-1)(ze-)+K[(0.80.2+e)z-1.2e+0.2]h-5-5-5Dz()=(z-1)(ze-)+K[(0.80.2+e)z-1.2e+0.2]2-5-5-5-5=z+[(0.80.2K+e)1--e]ze++K(0.21.2-e)2-5当K=5时,Dz()=z+3z+-15e,由于D(1)>0,D(-1)<0,而n为偶数,系统不稳定。-5(2)要使系统稳定则D(1)=K(1-e)>0所以K>0;-5-5D(1)-=+22e-K(0.61.4+e)>0所以K<3.3-5-5-5|a||0,3.22-0.02K>0,0.78-0.18K>0,所以系统稳定条件为01速度误差系数:K=lim(z-)1G(z)=¥rz->12加速度误差系数为:K=lim(z-)1G(z)=4.0az->121TT所以系统的稳态误差为e(¥)=e=++=1.0ssKKKpra7.14如图题7.14所示离散系统,其中T=0.1(s),K=1,r(t)=t,试求静态误差系数Kp,Kv,Ka,并求系统稳态误差e(¥)。r(t)e(t)e(*t)-Ts-TsKc(t)1-1-ee-Tsss(s+)1图题7.14-Ts1-eK解:Gs()=sss(+1)系统的开环传递函数为:.0005(z+)9.0G(z)=(z-1)(z-.0905)位置误差系数:K=lim1[+G(z)]=¥pz->1速度误差系数:K=lim(z-)1G(z)=1.0vz->12加速度误差系数为:K=lim(z-)1G(z)=0az->1T所以系统的稳态误差为:e(¥)=e==1ssKV55
王万良编著《自动控制原理》(高等教育出版社)习题解答第8章习题解答8.1非线性系统线性部分的极坐标图、非线性部分的负倒幅特性如图题8.1所示。试判断系统是否稳定,是否存在自振荡。ImIv=¥mv=¥¥¬X/aa0Rea0Re·G(jv)·1N0(X/a)v=Ⅱ¥v=IⅡ-1G(jv)N0(X/a)X/a()a()bIImmv=¥¥¬X/av=¥0R-1ab0ReeN0(X/a)v=I¥v=IG(jv)G(jv)-1X/aN0(X/a)()c()d图题8.1解:(a)存在稳定的自激振荡(b)存在稳定的自激振荡(c)a点是稳定的自振点,b是不稳定的自振点。(d)不稳定8.2如图题8.2所示非线性系统,分析系统稳定性和自激振荡的稳定性,并确定稳定自激振荡的振幅和频率。M402-Mss(+1)图题8.224-8w4w-4解:频率特性:Gj(w)==+j222jww(j+1)w(1+w)w(1+w)plim|(Gjw)|=¥,limÐGj(w)=-w®0w®0+23plim|(Gjw)|0,lim=ÐGj(w)=-w®+¥w®+¥228M4w-4-8w令=0,则w=1,所以=-2根据理想继电器的负倒特性,A=,系统是22w(1+w)w(1+w)p不稳定的,交点处的自激震荡是稳定的自激震荡。56
王万良编著《自动控制原理》(高等教育出版社)习题解答8.3如图题8.3所示双位继电器非线性系统,其中,a=1,M=3。分析自激振荡的稳定性,并确定稳定自激振荡的振幅和频率。M-a40ass(+1)(s+2)-M图题8.3241242(-w)解:Gjw()==--j2222jwjw(+1)(jw+2)(w+1)(w+4)ww(+1)(w+4)P-1ÐGjw()=--2tgw2PlimGjw()=¥limÐGjw()=-w®0w®023PlimGjw()=0limÐGjw()=-w®+¥w®+¥22令ImGjw()=0得w=2,则ReGjw()=-(与实轴交点),画出乃氏图3由图可知系统的负倒特性为1PA-=-NA()1121-2APa2算出-=-,画出负倒特性曲线,可知与乃氏曲线有交点,所以存在自激振荡,2b3自激振荡频率w=2,求幅值:PA2,得A2=5.26或1.24-=-13121-2AA=1.11或2.29,A=1.11为不稳定自激振荡幅值,所以舍去。取A=2.298.4如图题8.4所示非线性系统,试用描述函数法分析系统自激振荡的稳定性,并确定自激振荡的振幅和频率。10s(s+)1图题8.410-10-10解:G(jw)=,Re=,Im=22jw(jw+1)w+1(w+)1w1p22pa-=-A-a-jN(A)4b4b-10p22=-A-a2由w+14b解得:w=.497,A=5.0-10pa=-2(w+)1w4b57
王万良编著《自动控制原理》(高等教育出版社)习题解答8.5非线性控制系统结构如图题8.5所示。为使系统不产生自振,试利用描述函数法确定继电特性参数a,b的值。bu3crٛe0as(0.8s+1)(s+1)-图题8.524ba解:N(A)=1-,A³apAA负倒描述函数为:-1-pA=N(A)a24b1-A-1-1A®a,®-¥,A®¥,®-¥N(A)N(A)-1dN(A)所以必然存在极值:由=0得A=2adA-1-pa此时:|=A=2aN(A)2bp5令ÐG(jw)=-p,得--arctg8.0w-arctgw=-p,解得w=22-4.5w4[ReG(jw)]|=|=-5225w=w1(+w)(1+.064w)w=322-1-pa48b为使系统不产生自振荡,要求G(jw)与曲线无交点,即满足<-,所以a>。N(A)2b33p328.6如图题8.6所示非线性系统,已知非线性环节的描述函数为N(A)=A,分析系统自激4振荡的稳定性;若自激振荡稳定,确定自激振荡的振幅和频率。1s(s+1)(s+2)图题8.63214解:N(A)=A,-=-24N(A)3A58
王万良编著《自动控制原理》(高等教育出版社)习题解答1Gjw()=jwjw(+1)(jw+2)p3plimGj(w)=¥,limÐGj(w)=-,limGj(w)=0,limÐGj(w)=-w®0+w®0+2w®¥w®0+2奈氏曲线与负导特性曲线如下:由图可知,当A增大时,负倒特性移动方向由稳定区进入不稳定区,故自激振荡不稳定。8.7非线性系统结构如图题8.7所示,分析系统运动并计算自振参数。22r=0e010cÄ2011s(s+1)-101图题8.721020101(-w)解:G(jw)==--j=u(w)+jv(w)2222322jw(jw+)14w+1(-w)4w+w1(-w)令V(w)=,0得w=,1U(w|)=-5w=1三个非线性环节等价于一个死区继电特性,a=,5.0b=2,描述函数为4ba2N(A)=1-(),A³apAA1令-=-5,求得A=12.72N(A)故输出端的振幅为:A=12.72,频率为w=159
王万良编著《自动控制原理》(高等教育出版社)习题解答.8.8非线性系统的方框图如图题8.8所示。试绘制初始条件为c)0(=-,3c)0(=0的相轨迹以及对应的时间响应曲线,并讨论饱和非线性特性对系统暂态响应指标的影响。cr=0+e210Ä·0s(s+1)-2图题8.82,e>2×××解:描述系统的微分方程为cc+=u,其中u=e,e£2-2,e<-2××××××由比较点可得:e=-=-rcc,e=-c,e=-c整理上述关系式可得:-2,e>2××ee+=-=-ue,e£2,开关线为e=±22,e<-2××de×在e>2区域,有e+=-e2de×de×2令=a,得等倾线方程为e=-dea+1×2在e<-2区域,同理可得等倾线方程为e=a+1××de×在e<2区域,有e+=-eede×de×1令=a,得等倾线方程为e=-edea+1根据等倾线方程,可作出系统的概略相轨迹,如图所示:时间响应曲线:60
王万良编著《自动控制原理》(高等教育出版社)习题解答饱和非线性特性减慢了系统误差响应的收敛速度,恶化了系统暂态性能指标。.8.9设系统如图题8.9所示,假设系统仅受初始条件作用,试画e-e平面上的相轨迹。.creM1c1Ä0-Mss-+Ä+图题8.9解:(1)求微分方程:由结构图知u=c&&e=-c-c&e&=-c&-c&&=-c&-ue&&=-c&-u&=-u-u&当e¹0时,u&=0-Me>0e&&=Me<0当e=0时,e&&=-u-u&。其中e=0为开关线。(2)求相轨迹:ed&当e>0时,e&&=-Me&=-M&ede&=-Mde&de2e&=-2Me+c1可见,在e>0区域内,相轨迹是开口向左的抛物线,顶点在e轴上。当e<0时,同理可得2e&=2Me+c2相轨迹是一条开口向右的抛物线,顶点在e轴上。当e=0时,e&&=-u-u&,61
王万良编著《自动控制原理》(高等教育出版社)习题解答此时相轨迹在开关线上,u发生突跳。设突跳时刻为t,将上式在t时刻积分00+++t0t0t0e&&dt=-udt-u&dt∫t-∫t-∫t-000e&由于u跳跃,幅值为有限值±2M,所以+t0udt=0∫t-0+-+-e&(t)-e&(t)=-[u(t)-u(t)]0e0000De&(t)=-Du(t)00当e由负向正运动穿过开关线时,Du(t)=2M相轨迹图0所以在开关线上-2Me&>0De&(t0)=2Me&<0(3)由上面的分析可画出相轨迹,如图所示,相轨迹在开关线上有幅度为2M的跳跃,当e&>0时,相轨迹下跳,当e&<0时,相轨迹上跳,最终收敛于坐标原点。.8.10试绘制图题8.10所示系统的c-c相平面图,并分析系统d运动特性。初始条件为.c)0(=,0c)0(=2。K=12e1cÄ·01s-图题8.1解:由结构图知e+1e>1c&&=2e-11c&&=-2c-1£c£1-c+1c<-1.由初始条件c)0(=,0c)0(=2积分,当-1£c£1时,c&&=-2c&cdc&=-2cdc2222c&c得c&=-2c+4+=14262
王万良编著《自动控制原理》(高等教育出版社)习题解答相轨迹为一椭圆,且当c=1时,c&=±2当c=-1时,c&=±2当c>1时,c&&=-c-122积分得c&+(c+)1=6相轨迹是圆心在点(0,-1)半径为6的圆弧。当c<-1时,c&&=-c+122同理积分得c&+(c-)1=6相轨迹是圆心在点(0,1)半径为6的圆弧。整个相轨迹形成闭和的环形,如图所示。说明系统运动为等幅振荡,且和初始条件有关。c&2-101c-263
王万良编著《自动控制原理》(高等教育出版社)习题解答第9章习题解答9.1列写如图题9.1所示电路中以电源电压u作为输入,电容C,C上的电压u和u作为12c1c2输出的状态空间表达式。i2CR21i1uC=x2iL=x3+2LuC3-C1uC1=x1R2图题9.1解:由基尔霍夫定律得u=U+iL&+Ric1c2L2LC2uc2=iL+C3(u&c1-u&c2)u=R(Cu&+Cu&)+u11c12c2c1令x=U,x=U,x=i,可得1c12c23L-(C2+C3)-R1C2C2+C30M100MMy=XCRCC3X&=-3011X+u010MMM11R20L-L-L其中M=R(CC+CC+CC)11312239.2图题9.2所示为RLC电路,有电压源es及电流源is两个输入量。设选取状态变量x1=iL,x2=uC1,x3=uC2;输出量为y。建立该网络动态方程,并写出其向量-矩阵形式(提示:先列写节点a,b的电流方程及回路电势平衡方程)。uc1uc2o+iaaic2bC1C2LR1iLyR2+esis-o-c图题9.2解:由基尔霍夫定律得:CU&+i=CU&1c1s2c2CU&=i2c2Le=CU&R+U+U+iR+iL&s1c11c1c2L2L64
王万良编著《自动控制原理》(高等教育出版社)习题解答可得R1+R211R11---x&1LLLLL11isx&=00+-02CCe1sx&310000C29.3判断下列系统的状态能控性。-12-10(1)x&=0-20x+0u1-4011100(2)x&=010x+1u011011000(3)x&=010x+01u01110-401(4)x&=-4x+2u011l100l1(5)x&=1x+ul110l21l1100l10(6)x&=1x+ul110l12解:0-11(1)2S=[BABAB]=000c10-1rankSc=20x(k+)1=001x(k)K002试求使系统渐进稳定的K值范围。010解:A=001K002先求A的特征值,只要A的所有特征值的绝对值小于1,系统就会渐近稳定。l-102KK由lI-A=0,得0l-1=0,求得l(l-)=0,可以得到l1=0,l3,2=±22K0-l2又因为l<1,求得00)。c10解:rank==<12rank,系统不是完全能观的。cA00Ke1设K=,eKe2-K1e1AKc-=e-Ke202f()l=det[lI-(AKc-)]=l+Kl+Kee1e2*22f()l=(l+r)(l+2)r=l+3rl+2r*令f()l=f()l2则K=3,rK=2re1e23r所以K=e22r9.21设被控对象的状态方程为010x&=x+u-2-31y=[20]x设计一个状态观测器,使其极点配置在s=-10,s=-10;1273
王万良编著《自动控制原理》(高等教育出版社)习题解答解:系统能控、能观,并且为可控标准形全维观测器系统矩阵为:01h0[]-2h01A-1+C=-20=-2-3h-2-2h-311观测器特征方程为2lI-(A-1+C)=l+2(h+)3l+6(h+2h+)2=000122期望特征方程为(l+10)=l+20l+100=08.5得h0=5.8,h1=235.,所以,输出反馈矩阵为Ke=。23.59.22确定系统.010,x10x=x+ux)0(=,y=[10]x001x20的最优控制uˆ(t),使性能指标¥22J=∫(y(t)+ru(t))dt0为极小。010解:A=B=C=[10]Q=2R=2r001,,,,k11k12T-1TT设正定对称矩阵K=,满足下列黎卡提举证代数方程:KA+AK-KBRBK+CQC=0k12k22k11k120100k11k12k11k1201k11k12100即+-[01]+2[10]=k12k220010k12k22k12k2212rk12k22000得到下列线性代数方程组:122-k12=02r1k12-k12k22=02r122k12-k22=02r解线性代数方程组,并考虑K正定的条件,得k11=8r,k12=2r,k22=8rr,因此2rK=8r2r8rr系统的最优控制为*-1T18r2rx1(t)U(t)=-RBKx(t)=-[01]2r2r8rrx2(t)9.23给定一阶离散系统x(k+)1=x(k)+u(k),x)0(=1性能指标为322J=∑[x(k)+u(k)]k=0**求最优控制序列u(k)(k=3,2,1,0)和性能指标J。解:由题可知,最优控制的参数为A(k)=1,B(k)=1,P=0,Q=2,R=274
王万良编著《自动控制原理》(高等教育出版社)习题解答K(k)=Q(k)+AT(k)[K-1(k+1)+B(k)R-1(K)BT(K)]-1A(k)黎卡提差分方程为:-1[]-112K(k+)1+1=2+K(k+1)+=21K(k+)1+12由于N=4,K)4(=P=0,逆时间方向求解K(k),k=3,2,1,0,因此得:2[K)4(+1]2[K)3(+1]K)3(==2K)2(==311K)4(+1K)3(+1222[K)2(+1]162[K)1(+1]42K)1(==K)0(==15113K)2(+1K)1(+122*K(k)-2最优控制率为:U(k)=-X(k);k=3,2,1,02因为X)0(=1*K)0(-28**5所以U)0(=-X)0(=-,U)0(作用下的最优状态为X)1(=21313*K)1(-240**25U)1(=-X)1(=-,U)1(作用下的最优状态为X)2(=2169169*K)2(-2200**125U)2(=-X)2(=-,U)2(作用下的最优状态为X)3(=221972197*K)3(-21000U)3(=-X)3(=-228561*1221最优性能指标J=K)0(X)0(=21375'
您可能关注的文档
- 胡汉才编著《理论力学》课后习题答案第4章习题解答.doc
- 胡汉才编著《理论力学》课后习题答案第5章习题解答.doc
- 胡裕树_《现在汉语》课后习题答案.doc
- 胡裕树《现代汉语》教材思考和练习参考答案(完整版).pdf
- 胡运权《运筹学教程》习题答案(第一章)[1].pdf
- 自动化制造系统复习题(有答案).docx
- 自动控制原理 (胡寿松 著) 科学出版社 课后答案.pdf
- 自动控制原理 第3章习题解答.pdf
- 自动控制原理 课后答案(孙亮 杨鹏 着) 北京工业大学出版社.pdf
- 原理_于希宁_课后习题答案.doc
- 胡寿松第5版_课后习题及答案_完整_.doc
- 自动控制原理及其应用部分习题解答.doc
- 自动控制原理第2版王划一课后习题答案.pdf
- 自动控制原理第3版答案 孙炳达主编.doc
- 自动控制原理第二版 冯巧玲 北航第一章习题及答案.doc
- 自动控制原理第五版胡寿松主编课后习题答案详解.pdf
- 自动控制理论第四版课后习题详细解答答案(夏德钤翁贻方版).doc
- 自动控制理论课后习题答案(上).doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明